一种大型自动摆盘机的制作方法
1.本发明属于食品机械领域,特别涉及一种用于面食特别是包子馒头类的团状面食制做过程中的自动摆盘机。
背景技术:
2.面食是中国传统的食品,在面食中馒头和包子更是常见的主要食品之一,随着机械技术的进步,馒头和包子的制作也逐渐走上机械化和自动化,减少了繁重的人工体力劳动,给人们的生活减轻了压力;目前,现有的馒头或者包子的制作,大多都是采用面坯的制作,成型,蒸制等几个步骤;而馒头和包子的蒸制大多采用蒸笼或者蒸箱进行,在蒸制前,需要将馒头或者包子间隔、均匀的摆放在蒸笼或者蒸箱的笼屉内,以免相互粘连,因为蒸制后馒头或者包子的体积会膨胀;蒸箱的蒸制方法是将馒头或者包子放入蒸盘,将装有馒头或者包子的蒸盘一个一个间隔放入蒸箱内,在蒸箱内通入高温蒸汽,对馒头或者包子进行加热达到蒸制的目的;蒸笼的蒸制方式是将多个装有馒头或者包子的笼屉堆叠,在堆叠的笼屉下部设置蒸锅,或者在堆叠的笼屉下部或者上部通入蒸汽,依靠蒸锅内的水产生蒸汽或者通入的水蒸气对笼屉内的馒头或者包子进行加热,达到蒸制的目的;现有的将馒头或者包子装入蒸盘大多采用自动摆盘机实现,其缺陷是由于蒸盘相对于采用蒸笼方式的笼屉要小,且不需要堆叠,能够实现自动送入蒸盘和输出摆放好馒头或者包子的蒸盘进入到蒸箱,而不能适应蒸笼方式的体积大,且需要堆叠的方式。
技术实现要素:
3.针对现有的自动摆盘机不能够适应大型堆叠式蒸笼式的笼屉自动摆放包子和馒头的问题,本实用新型提出一种大型自动摆盘机,能够实现笼屉的内的馒头或者包子等蒸制团状面食的自动摆放;其具体的技术方案是:一种大型自动摆盘机,其特征在于:包括笼屉,机械手,机械手开合装置,右机架,输送带,机械手安装座,机械手上下运动臂,上框架,控制箱,机械手上下运动动力及导向装置,机械手横向运动驱动装置,机械手横向运动导向装置,左机架;所述的笼屉为矩形,放置在上框架的下方,开口向上,并位于输送带的内侧边(内侧是指左机架和右机架之间),且一侧边与输送带运动方向平行,并与机械手的运动范围相匹配;所述的机械手安装在机械手安装座上,通过机械手开合装置与机械手安装座连接,并位于输送带的上方;所述的机械手开合装置安装在机械手安装座上,与机械手安装座固定连接,能够实现机械手的开合;所述的右机架安装在上框架的下方,与上框架固定连接,下端与地面或者安装基础接触,能够固定和支撑上框架;所述的输送带安装在右机架的内侧,一端与上道工序的馒头或者包子输送装置相衔接,能够将馒头或者包子从输送带的一端输送到输送带的另一端;所述的机械手安装座安装在机械手上下运动臂的下端,与机械手上下运动臂固定连接;输送带机械手上下运动臂安装在机械手上下运动动力及导向装置上,能够在机械手上下运动动力及导向装置做直线运动;输送带上框架安装在右机架上方,与右机架和左机架固定连接;所述的控制箱安装在右机架或者左机架或者上框架上或
者安装在本主机附近,与右机架或者左机架或者上框架固定连接,或者自由摆放;其内部安装有本机的控制元件,这些控制元件通过导线或者无线通讯协议与输送带、机械手上下运动动力及导向装置、机械手横向运动驱动装置、机械手开合装置的动力及控制单元连接,并能够控制这些动力及控制单元的运动方式和运动状态;所述的机械手上下运动动力及导向装置安装在机械手横向运动导向装置上,并能够沿机械手横向运动导向装置做直线运动;所述的机械手上下运动动力及导向装置与机械手上下运动臂连接并能够驱动机械手上下运动臂做上下运动;所述的机械手横向运动驱动装置安装在上框架上,与上框架固定连接;所述的机械手横向运动驱动装置还与机械手上下运动动力及导向装置连接,能够驱动机械手横向运动动力及导向装置沿机械手横向运动导向装置运动;所述的机械手横向运送导向装置安装在上框架上,与上框架固定连接,并与机械手上下运动动力及导向装置连接,能够给机械手上下运动动力及导向装置提供运动导向,并限制机械手上下运动动力及导向装置的运动为直线;所述的左机架安装在上框架的左端,与上框架固定连接,能够安装并支撑上框架。
4.进一步的,所述的笼屉是能够层层叠加并且叠加后能够密闭扣合的多个笼屉单元组成。
5.进一步的,所述的机械手由一对能够开合的手爪组成。
6.进一步的,所述的手爪是薄壁长板形的,其长度大于两个馒头或者包子在输送带上摆放的距离,手爪的长度方向与输送带的运动方向平行。
7.进一步的,所述的机械手开合装置有一个以上。
8.进一步的,所述的输送带是皮带式输送带。
9.进一步的,所述的机械手上下运动动力及导向装置是电动滑台。
10.进一步的,所述的机械手横向运动驱动装置是链条驱动机构或者是皮带驱动装置或者是气动驱动装置或者是电动驱动装置。
11.进一步的,所述的机械手横向运动导向装置有一个以上。
12.有益效果
13.本实用新型的有益效果在于,能够适应大尺寸蒸笼式的自动摆盘,自动化程度高,降低劳动强度,并能够适应多层叠加的笼屉的馒头或者包子等的摆盘。
附图说明
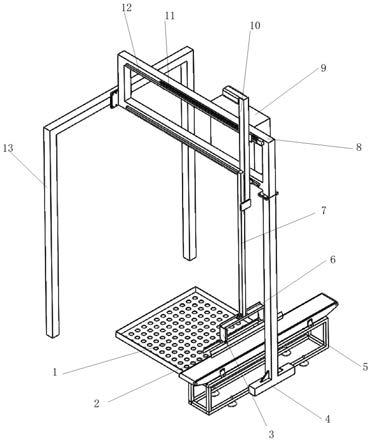
14.图1是本实用新型的结构示意图
15.1.笼屉,2.机械手,3.机械手开合装置,4.右机架,5.输送带,6.机械手安装座,7.机械手上下运动臂,8.上框架,9.控制箱,10.机械手上下运动动力及导向装置,11.机械手横向运动驱动装置,12.机械手横向运动导向装置,13.左机架。
具体实施方式
16.为了更好地说明本实用新型的技术方案,现结合附图进一步说明本实用新型的具体实施方式,如图1,本例中以常用的馒头蒸制的笼屉1的尺寸长x宽x高为1000毫米x1000毫米x200毫米的规格为例,因为本实用新型的应用场景大多是较大的笼屉尺寸,层叠为4层为例,将笼屉1放置在输送带5的内侧边,并保证笼屉1的一个侧壁平行于输送带5的运动方向,
开口向上,平放在地面或者在笼屉1下部设置一个垫板上,本例中选用机械手2由两块薄壁钢板制成长条形,保证机械手2的长度与笼屉1内单排摆放的馒头的总长度匹配,机械手2的高度与相应的馒头高度相匹配,机械手2的厚度小于1毫米,将机械手2安装在机械手开合装置3上,本例中选用本行业通用的气动机械手作为机械手开合装置3,选用两个,分别安装在靠近机械手安装座6的两个端部,将机械手2的两个手爪分别对称安装在机械手开合装置3的两侧活动爪上,并与该活动爪固定连接,在机械手开合装置的活动爪运动时,能够实现机械手爪同步的开合摆动;本例中选用本行业通用的矩形钢管作为材料将其切割焊接后作为右机架4和左机架13,这样能够减轻整机的重量,将右机架4安装在上框架8的右端下方,与上框架8固定连接;本例中选用本行业通用的符合卫生标准要求的馒头皮带式输送带作为输送带5,将输送带5安装在右机架4的内侧,保持输送带5的上表面水平,也就是保证输送带5上的馒头处于相同的高度,这样便于机械手2在同时抓取多个馒头时的抓取成功率;将输送带5的输入端与上道工序的馒头机的馒头输出输送装置的馒头出口相衔接,便于接收并均匀输送馒头到机械手2的抓取位置;将机械手安装座6安装在机械手上下运动臂7的下端,为长条状,并保证机械手安装座6的长度方向与输送带5的运动方向一致;本例中选用本行业通用的与电动滑台匹配的电动滑杆作为机械手上下运动臂7,将机械手上下运动臂7安装在由电动滑台制成的机械手上下运动动力及导向装置10上,并与机械手上下运动动力及导向装置10连接,能够准确地保证机械手上下运动臂7沿机械手上下运动动力及导向装置10做直线运动,同时保证机械手上下运动臂7的长度和运动行程大于机械手2的最大上下运动行程,也就是保证从最低一个笼屉1内摆放馒头到最上一层笼屉1内摆放馒头的高度变化的需要;本例中选用与右机架4规格相近的矩形钢管,将其焊接成框架形作为上框架8,将上框架8安装在右机架4的上部,两端分别与右机架4和左机架13固定连接,本文中的上下左右等方向词,均以面对视图方向;本例中选用本行业通用的控制箱作为控制箱9,将控制箱9根据操作方便的原则进行安放并固定,并在控制箱9的内部安装plc,显示屏,继电器,电源控制器等通用的控制元件,用于控制输送带5的运动状态,机械手开合装置3的气动控制电磁阀的工作状态,电动滑台制成的机械手上下运动动力及导向装置10的伺服电机的运动状态,机械手横向运动驱动装置11的伺服电机的运动状态,以及整机的照明和其他用电器的工作状态;本例中选用本行业通用的电动滑台作为机械手上下运动动力及导向装置10,将机械手上下运动动力及导向装置10安装在机械手横向运动导向装置12上,并与机械手横向运动导向装置12连接,同时与机械手横向运动驱动装置11连接,能够在机械手横向运动驱动装置11的驱动下,沿机械手横向运动导向装置12做直线运动;本例中选用本行业通用的由伺服电机或者步进电机驱动的链条式驱动装置作为机械手横向运动驱动装置11,将机械手横向运动驱动装置11安装在上框架8上,并与上框架8固定连接,其中的运动链与机械手上下运动动力及导向装置10连接,能够带动机械手上下运动动力及导向装置10做精确运动;本例中选用本行业通用的气动滑轨作为机械手横向运动导向装置12,本例中选用两个,平行安装在上框架8上,并与上框架8固定连接,这样能够保证整个机械手系统的运行稳定;将机械手横向运动导向装置12上的滑台座与机械手上下运动动力及导向装置10固定连接;本例中选用左机架13的形状为门形,将其安装在上框架8的左端,与上框架8固定连接,与右机架4形成稳定支撑;本实用新型的右机架4和左机架13的形式可以根据应用场景的不同设置不同的结构形式和形状,这样就完成了本实用新型的实施。
17.应用时,馒头从馒头机输送到输送带5上表面,输送带5带动馒头均匀运动,也就是每个馒头间的间隔均匀,当运动到机械手3下方时,安装在输送带5上的的传感器发出信号给控制箱9,控制箱9指令输送带5停止运动,机械手2下降到馒头所在位置,根据笼屉1的大小,机械手2一次抓取的馒头数量与笼屉1的容纳馒头的单排数量设置机械手2的总长度,当机械手2下降到抓取位置时,启动机械手开合装置3,机械手2合拢,将馒头抓起,启动机械手横向运动驱动装置11,带动机械手上下运动动力及导向装置10横向运动,从而带动机械手2横向运动,当运动到笼屉1的馒头摆放位置时,机械手2继续下降(或者上升,这样是根据笼屉1层叠的高度设定控制箱9的控制程序实现的),下降到笼屉1底部附近时松开机械手2,馒头落在笼屉1内,实现了一排馒头的摆放,重复这一动作,并按照每次横向运动的距离增加笼屉1内每排馒头间的距离,直到将笼屉1内摆满馒头,将第二层笼屉1放置在第一次笼屉1上,并与第一次笼屉1嵌合,一直到整个笼屉1的层叠完成后,将摆满馒头的层叠笼屉1移出,重新放入第一次笼屉1,这样循环,就能够实现多层笼屉1层叠且大型笼屉的自动摆盘工作。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1