制饼机传动杆式托盘传动机构的制作方法
1.本实用新型涉及一种传动杆式托盘传动机构,具体而言,涉及一种制饼机的传动杆式托盘传动机构。
背景技术:
2.在人们的日常生活中,面食食品如烤饼、煎饼、面包、点心等已是生活中不可缺少的食品,随着工作的忙碌,简易、快捷的食品已经越来越受到不同层次人群的青睐。
3.因此,市场上存在一种面团机/制饼机器,用于制作如中东烤饼、法式薄饼、印度薄饼、墨西哥塔可饼等小型扁平面食。这样的厨房设备的发明和使用是已知的。当前的面团机/制饼机器具有面粉搅团装置、面团转移装置和处理器系统等。面团转移装置将面团从一个位置转移到另一个位置。因此,面团机/制饼机器的使用者对面团转移装置的要求是极高的,需要其能够精准定位,以在特定位置承接面团,并在特定位置卸下面团。
4.在现有的面团转移装置所采用的传动方式中,通常使用电机配合传动齿传递动力,驱动托盘承接面团并进行转移操作。然而,现有的面团转移装置投入使用后,所采用的电机在运行时存在电机轴偏心的问题,导致传动齿轮发生偏移使得磨损加剧,致使齿轮失去正常功能而失效,从而影响动力装置使用寿命。
5.本技术旨在解决上述问题。
技术实现要素:
6.为了解决上述问题,本实用新型提供一种制饼机传动杆式托盘传动机构,其具有动力装置和传输装置,所述传输装置包括固定罩、托盘、传动杆、滑动块、滑动杆、托盘导向杆和拖杆,所述动力装置包括电机,所述电机与所述传动杆固定连接;
7.其中,所述滑动杆和所述托盘导向杆固定在所述固定罩上,所述滑动块套设在所述滑动杆上,所述拖杆套设在所述托盘导向杆上,所述拖杆与所述托盘可转动地连接;
8.滑动块套设于传动杆上,并且滑动块具有与传动杆的螺纹相啮合的螺纹孔。
9.优选地,所述滑动块上设有斜向的斜滑槽,拖杆具有上端拖杆头,所述斜滑槽中容纳有所述拖杆的上端拖杆头,并且所述上端拖杆头能够在所述斜滑槽中滑动。
10.优选地,所述托盘上具有限位卡口,所述限位卡口能够围绕顶杆转动。
11.优选地,所述滑动块上具有沿水平方向伸出的弹簧柱。
12.优选地,在所述滑动块的弹簧柱上设置有扭力弹簧,所述扭力弹簧包括第一端和第二端。
13.优选地,滑动块上还设置有弹簧卡位,所述扭力弹簧的第二端固定于滑动块上的所述弹簧卡位。
14.优选地,所述扭力弹簧的第一端向下弹性压迫所述拖杆的所述上端拖杆头。
15.优选地,滑动块还包括限位筋和感应柱。
16.优选地,本实用新型的传动杆式托盘传动机构还包括感应板,感应板固定在固定
罩的外侧。
17.优选地,所述固定罩还包括通孔,滑动块上的感应柱穿过固定罩的通孔。
18.本实用新型至少提供了以下技术效果。
19.以待传送的物体为面团为例,本技术涉及的传动杆式托盘传动机构能够在处理器系统的控制下,通过控制电机,在特定高度位置承接面团,并在特定高度位置将面团卸下。且传动杆式托盘传动机构可以精准的控制其翻转的角度,使得传动杆式托盘传动机构的每次传送都可以保持一致,提高准确性,方便后续流程的设施(如压饼装置)顺利作业。例如,压饼装置能够容易地预判面团的卸下位置,从而每次在相同的地方进行压饼作业,使得压出的饼的成功率增加,废品率降低。同时,由于申请涉及的传动杆式托盘传动机构的电机未采用配合传动齿的传动方式,而是通过电机配合传动杆驱动滑动块的方式来驱动托盘承接面团以进行传动,避免了电机运行时可能的电机轴偏心问题,从而有效减少了传动齿轮的磨损,延长了动力装置的使用寿命。
20.本技术的其它特征和优点将在随后的说明书中阐述,或者通过实施本技术而了解。
附图说明
21.附图用来提供对本技术技术方案的进一步理解,并且构成说明书的一部分,与本技术的实施例一起用于解释本技术的技术方案,并不构成对本技术技术方案的限制。
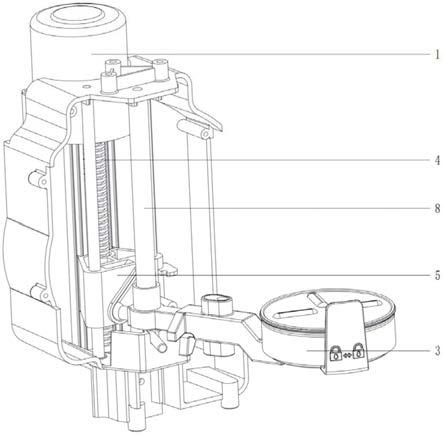
22.图1是本技术涉及的传动杆式托盘传动机构的立体图;
23.图2是本技术涉及的传动杆式托盘传动机构的爆炸图;
24.图3是本技术涉及的传动杆式托盘传动机构的剖视示意图;
25.图4是本技术涉及的传动杆式托盘传动机构的滑动块和固定罩的立面的示意图;
26.图5是本技术涉及的传动杆式托盘传动机构的托盘在运动时位置的示意图。
27.附图标记说明:
[0028]1–
电机;1a
–
电机轴
[0029]2–
固定罩;2a
–
通孔;2b
–
下限位平面;2c
–
限位槽;2d
–
柱孔;2e
–
定位孔;2f
–
固定柱;2g
–
上限位平面;
[0030]3–
托盘;3a
–
限位卡口;
[0031]4–
传动杆;4a槽位;
[0032]5–
滑动块;5a
–
斜滑槽;5b
–
感应柱;5c
–
弹簧柱;5d
–
弹簧卡位;5e
–
限位筋;5f
–
螺纹孔;
[0033]6–
滑动杆;
[0034]7–
扭力弹簧;7a
–
第一端;7d
–
第二端;
[0035]8–
托盘导向杆;8a
–
顶杆;
[0036]9–
拖杆;9a
–
上端拖杆头;
[0037]
10
–
感应板;10a
–
感应头。
具体实施方式
[0038]
参见图1、图2和图3,分别示出了本技术涉及的传动杆式托盘传动机构的立体图、
爆炸图和剖视示意图。
[0039]
本实用新型涉及的传动杆式托盘传动机构包括固定罩2、托盘3、传动杆4、滑动块5、滑动杆6、托盘导向杆8、拖杆9、感应板10和动力装置。
[0040]
动力装置的作用是为本技术的传动杆式托盘传动机构提供动力来源,间接地控制托盘3的运动。动力装置可以包括电机1;电机1具有电机轴1a。电机1能够驱动传动杆4旋转。
[0041]
其中,所述滑动杆6和所述托盘导向杆8固定在所述固定罩(2)
[0042]
滑动杆6设置在滑动块5内,其可以是至少一根竖直的滑动杆,优选地为两根以上滑动杆。
[0043]
即,滑动块5套设于滑动杆6上,使得滑动块5能够沿滑动杆6上下运动,而不会左右运动或横向偏移。此外,滑动块5套设于传动杆4上,并且滑动块5具有与传动杆4的螺纹相啮合的螺纹孔5f。
[0044]
传动杆4设置于固定罩2中,其与电机1的电机轴1a连接,从而能够通过电机1驱动而旋转。传动杆4的旋转使得其表面螺纹随之旋转,进而能够使滑动块5沿滑动杆6上下移动。
[0045]
滑动块5上还设置有斜滑槽5a,以用于容纳拖杆9的上端拖杆头9a。拖杆9的上端拖杆头9a优选地为球形,但也可以是其他适合在斜滑槽5a中进行灵活滑动的形状。斜滑槽5a斜向设置,使得其中的拖杆9的上端拖杆头9a在沿斜滑槽5a移动时同时发生水平和竖直方向的位移。
[0046]
滑动块5上具有沿水平方向伸出的弹簧柱5c,在该弹簧柱5c上还设置有扭力弹簧7,扭力弹簧7。所述扭力弹簧7包括第一端7a和第二端7d扭力弹簧7的第二端7d固定于滑动块5上的弹簧卡位5d,另一个支点压在拖杆9的上端拖杆头9a上。
[0047]
拖杆9套设于托盘导向杆8上,使得拖杆9能够沿托盘导向杆8上下运动。拖杆9的上端拖杆头9a位于滑动块5的斜滑槽5a中,拖杆9的外端插入连接有托盘3。拖杆9与托盘3相互之间转动连接,即托盘3可以相对于拖杆9转动。
[0048]
托盘3还具有限位卡口3a,在后述的翻转位置处并且拖杆9的上端拖杆头9a在斜滑槽5a中进行相对滑动时,限位卡口3a能够在一定角度上绕顶杆8a转动。由于限位卡口3a存在两个边,因此其自由度受限,即限位卡口3a只能在所限定的角度范围上转动,而不能在全部圆周范围内即在360
°
的范围内转动。
[0049]
图4示出了本技术涉及的传动杆式托盘传动机构的滑动块和固定罩的立面的示意图。
[0050]
固定罩2还包括通孔2a、下限位平面2b、限位槽2c、柱孔2d、固定柱2f、上限位平面2g。滑动块5还包括限位筋5e和感应柱5b。
[0051]
为通过固定罩2的电机1驱动传动杆4以带动滑动块5做出纵向运动,电机1的电机轴1a穿过柱孔2d可拆卸地固定连接至传动杆4上端的槽位4a,传动杆4表面的螺纹与滑动块5上的螺纹孔5f螺纹啮合,使得滑动块5可沿传动杆4做出纵向运动,传动杆4的下端插入固定罩2的定位孔2e。因此,在设备工作时,电机1驱动下传动杆4原地旋转,并带动滑动块5纵向运动。
[0052]
当滑动块5沿滑动杆6纵向运动时,限位筋5e被限定于限位槽2c中仅沿纵方向运动,从而进一步强化了滑动块5纵向运动的稳定性,以确保滑动块5在运动使始终保持竖直。
[0053]
此外,感应板10通过固定柱2f固定在固定罩2的外侧,固定后的感应板10的高度与固定罩2呈竖条状的通孔2a的高度相对应。相对于固定罩2安装有感应板10侧的另一侧,滑动块5上的感应柱5b穿过固定罩2的通孔2a,因为所述通孔2a呈竖条状,所以在滑动块5做出向上和/或向下运动的过程中,感应柱5b穿过通孔2a随滑动块5一致进行向上和/或向下运动,在这个过程中,感应柱5b经过多个感应头10a,进而由感应头10a测得感应柱5b相应位置的信号,基于测得的信号控制动力装置暂停/继续工作,配合下粉、下液装置完成面团搅拌工作。
[0054]
下面对工作原理进行简要描述。
[0055]
在如图5所示,当托盘位于上端的起始位置时,拖杆9的上端拖杆头9a在扭力弹簧7压力作用下受到压迫而位于滑动块5的斜滑槽5a的下端中。拖杆9的下端与托盘3连接,停在如图5起始位置。
[0056]
动力装置中的电机1通过电机轴1a传递动力驱动传动杆4原地旋转,在传动杆4的旋转下驱动滑动块5做向下运动,同时在滑动杆6和限位筋5e的限制作用下,滑动块5只能沿滑动杆6在垂直方向做向下/向上运动,如图5所示,在扭力弹簧7压力作用下,滑动块5带动拖杆9一起向下/向上运动。因此,拖杆9可以通过斜滑槽5a的下端带动设于其中的拖杆9的上端拖杆头9a,进而带动拖杆9一起做向下/向上运动。由于拖杆9与托盘3可转动地连接,因此当拖杆9向下/向上移动时,托盘3也被拖杆9带动同步地进行向下/向上移动。
[0057]
当滑动块5处于运动范围的最高位置时,位于感应板10最上端的感应头10a接收来自感应柱5b的信号,相应地,通过该信号能够控制电机1旋转以带动传动杆4进行原地旋转,从而使与传动杆4啮合的滑动块5被驱动做出向下运动直至托盘3处于如图5所示的起始位置,此时托盘3可以获取待转移的物品,如面团。
[0058]
动力装置中的电机1通过电机轴1a传递动力驱动滑动块5向下/向上移动,到达起始位置后,传动杆4旋转驱动滑动块5向下运动,滑动块5带动拖杆9向下运动到达下限位平面2b位置时,拖杆9因到向下运动范围的极限位置2b而无法跟随滑动块5继续做向下运动,而此时传动杆4继续旋转带动滑动块5继续向下运动。随着滑动块5的向下运动,拖杆9的上端拖杆头9a受到滑动块5的斜滑槽5a的作用而水平移动,进而上端拖杆头9a挤压扭力弹簧7的第一端7a,使得扭力弹簧7产生扭曲形变,上端拖杆头9a的水平滑动继而带动拖杆9在横向位置上从一侧移动到另一侧。此过程中,上端拖杆头9a相对于斜滑槽5a而言是沿着斜滑槽5a而滑动。
[0059]
当拖杆9的上端拖杆头9a相对于斜滑槽5a滑动至斜滑槽5a约中间位置时,托盘3在横向位置上从一侧移动到另一侧,并且托盘3的限位卡口3a的y型限位柱的一侧与顶杆8a相抵触,导致托盘3无法继续平移。此时,限位卡口3a卡设于顶杆8a位置。
[0060]
动力装置中的电机1通过电机轴1a传递动力驱动滑动块5继续做向下运动,拖杆9的上端拖杆头9a在滑动块5的斜滑槽5a中滑动,从斜滑槽5a的约中间位置滑动至斜滑槽5a的上端。在此过程中,由于限位卡口3a的限位作用,因此,托盘3无法在横向位置上继续平移。由于限位卡口3a的y型限位柱卡设在顶杆8a上,且限位卡口3a存在两个边,因此限位卡口3a可以在一定角度上转动,直至限位卡口3a的另一侧限位柱与顶杆8a相抵触。由于限位卡口3a相对于顶杆8a转动,因此托盘3被带动进行同步翻转。因此,可以实现将待转移的物品通过翻转而抖落。此时,托盘3位于翻转位置(如图5所示),滑动块5位于其运动范围的最
底部,位于感应板10最下端的感应头10a接收到感应柱5b的信号,装置通过电机1驱动滑动块5做向上运动。
[0061]
当托盘3向起始位置运动的过程中,感应板10传达信号,电机1通过电机轴1a驱动传动杆4旋转,且扭力弹簧7因压迫产生扭曲形变具有反向压迫上端拖杆头9a的压力,因此,在电机的推动力和弹簧形变的驱动力两者结合之下,促使了拖杆9的上端拖杆头9a在滑动块5的斜滑槽5a中滑动回斜滑槽5a的下端,并在该斜滑槽5a下端的承托之下带动拖杆9同步滑动块5的向上运动回到起始位置。
[0062]
通过以上过程,待转移的物品可以由托盘3由高处运输到低处,在水平位置一侧转移到另一侧、并因翻转而被卸下。
[0063]
虽然本技术所揭露的实施方式如上,但所述的内容仅为便于理解本技术而采用的实施方式,并非用以限定本技术。任何本技术所属领域内的技术人员,在不脱离本技术所揭露的精神和范围的前提下,可以在实施的形式及细节上进行任何的修改与变化。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1