一种瓜子自动清洗机的制作方法
1.本技术涉及袋装瓜子生产的领域,尤其是涉及瓜子自动清洗机。
背景技术:
2.袋装瓜子在生产加工前,需要对瓜子进行清洗。人们往往通过清洗机对瓜子进行清洗,清洗机通常包括机架、清洗台以及传送带,清洗台内装有用于清洗瓜子的水,瓜子通过传送带进入清洗台,瓜子全部浸入水中,从而对瓜子进行清洗,瓜子内的杂物以及干瘪的瓜子会上浮到水面,最后瓜子随传送带送出清洗台,完成瓜子的清洗。
3.针对上述的相关技术,发明人认为存在以下缺陷:当水面上的杂物较多时,需要人工及时进行清理,不然容易影响后续瓜子的清洗,但是通过人工打捞杂物,导致杂物清理效率较低,因此有待改进。
技术实现要素:
4.为了提高对杂物的清理效率,本技术提供一种瓜子自动清洗机。
5.一种瓜子自动清洗机,包括机架以及设置于机架上的清洗箱,所述清洗箱内部中空且开口朝上,所述清洗箱的相向两内侧壁上均沿水平方向开设有滑动槽,每个所述滑动槽内均沿轴向方向转动设置有传动丝杆,每个所述传动丝杆上均设置有用于在滑动槽内滑动的滑动块,所述滑动块与传动丝杆螺纹连接,两个所述滑动块之间设置有清理板,所述清理板上均匀开设有若干个过滤孔,所述清洗箱的外侧壁设置有用于驱动传动丝杆转动的驱动件,所述清理板的下端沿自身长度方向垂直连接有置物板。
6.通过采用上述技术方案,清洗瓜子时,杂物会上浮至水面上,通过驱动件带动传动丝杆转动,传动丝杆带动滑动块在滑动槽内移动,滑动块带动清理板在清洗箱内移动,清理板能够对清洗箱水面上的杂物进行收集并推至清洗箱的一端,从而便于工作人员对杂物的清理,提高对杂物的清理效率。
7.可选的,所述清洗箱相邻滑动槽的相向两内侧壁上均开设有供置物板插入的清料口,所述清洗箱与清料口同侧的外侧壁均设置有与清料口连通的容纳盒,所述容纳盒的上端面设置有安装口,所述容纳盒的上端面设置有用于封闭安装口的安装板,所述安装板朝向容纳盒的一侧设置有除料盒,所述除料盒通过安装口伸入容纳盒内,所述除料盒朝向清料口的一侧开设有进料口,所述除料盒的底壁均匀开设有透水孔,所述置物板的上端面与除料盒的底壁紧贴。
8.通过采用上述技术方案,清理板和置物板对水面上的杂物进行清理后,清理板移动至滑动槽的一端,使得置物板与除料盒的外底壁紧贴,使得置物板上的杂物通过进料口进入除料盒内,将除料盒从容纳盒内取出,即可将杂物从清洗箱内取出,省时省力。
9.可选的,所述安装板上开设有安装孔,所述安装孔内插设有用于封闭进料口的限位板,所述限位板远离除料盒底壁的一侧垂直连接有限位条,所述限位条与安装板的上端面紧贴,所述安装板的上端面设置有用于限制限位板脱离安装孔的定位件。
10.通过采用上述技术方案,需要将除料盒从容纳盒内取出时,将限位板插入安装孔内,接着通过定位件将限位条固定在安装板上,限制限位板脱离安装孔,然后即可将除料盒从容纳盒内提出,限位板能够限制杂物从进料口掉出。
11.可选的,所述定位件包括与安装板上端面转动连接的定位柱、定位杆以及定位螺栓,所述定位杆连接于定位柱的外侧壁上,所述定位螺栓螺纹连接于定位杆远离定位柱的一端且抵紧限位条。
12.通过采用上述技术方案,将限位板插入安装孔内后,限位条与安装板紧贴,接着转动定位柱,使得定位螺栓对准限位条,然后旋紧定位螺栓,使得定位螺栓抵紧限位条,从而限制限位板脱离安装孔;另外,当定位螺栓抵紧限位条后,定位杆可以充当把手,便于工作人员提起除料盒。
13.可选的,所述定位螺栓上套设有紧固弹簧,所述紧固弹簧的一端抵紧定位螺栓的螺帽、另一端抵紧定位杆。
14.通过采用上述技术方案,旋紧定位螺栓后,紧固弹簧能够给定位螺栓一个顶紧力,使得定位螺栓上的外螺纹抵紧定位杆上的内螺纹,从而限制定位螺栓松动。
15.可选的,所述安装板朝向除料盒的一侧沿周向连接有密封圈,所述密封圈与容纳盒的上端面紧贴。
16.通过采用上述技术方案,密封圈能够减少安装板与容纳盒之间的空隙,从而减少水从空隙中溅出。
17.可选的,所述清洗箱与滑动槽同侧的相向两内侧壁之间沿清洗箱的长度方向间隔转动设置有至少两个搅拌轴,每个所述搅拌轴的外侧壁均沿周向间隔设置有若干个用于对瓜子进行搅拌的搅拌叶片,每个所述滑动槽靠近清洗箱底壁的内侧壁上均沿清洗箱的长度方向开设有连接槽,所述搅拌轴的两端均伸入连接槽内且均套设有转动齿轮,所述滑动块的下端面设置有伸入连接槽内的连接杆,所述连接杆远离滑动块的一端设置有驱动齿条,所述驱动齿条与转动齿轮相互啮合。
18.通过采用上述技术方案,当滑动块在滑动槽内移动时,滑动块带动连接杆在连接槽内滑动,连接杆带动驱动齿条移动,驱动齿条经过转动齿轮时能够带动转动齿轮转动,转动齿轮带动搅拌轴转动,搅拌轴上的搅拌叶片对瓜子进行搅拌,从而提高瓜子的清洗效果。
19.可选的,所述驱动齿条朝向连接杆的一侧设置有支撑环,所述支撑环的内侧壁与连接杆的外侧壁紧贴。
20.通过采用上述技术方案,支撑环能够给驱动齿条提供支撑力,从而使得驱动齿条与连接杆之间始终保持垂直状态,确保驱动齿条能够顺利与转动齿轮啮合。
21.综上所述,本技术包括以下至少一种有益技术效果:1、清洗瓜子时,杂物会上浮至水面上,通过驱动件带动传动丝杆转动,传动丝杆带动滑动块在滑动槽内移动,滑动块带动清理板在清洗箱内移动,清理板能够对清洗箱水面上的杂物进行收集并推至清洗箱的一端,从而便于工作人员对杂物的清理,提高对杂物的清理效率。
22.2、清理板和置物板对水面上的杂物进行清理后,清理板移动至滑动槽的一端,使得置物板与除料盒的外底壁紧贴,使得置物板上的杂物通过进料口进入除料盒内,将除料盒从容纳盒内取出,即可将杂物从清洗箱内取出,省时省力。
23.3、将限位板插入安装孔内后,限位条与安装板紧贴,接着转动定位柱,使得定位螺栓对准限位条,然后旋紧定位螺栓,使得定位螺栓抵紧限位条,从而限制限位板脱离安装孔;另外,当定位螺栓抵紧限位条后,定位杆可以充当把手,便于工作人员提起除料盒。
24.4、当滑动块在滑动槽内移动时,滑动块带动连接杆在连接槽内滑动,连接杆带动驱动齿条移动,驱动齿条经过转动齿轮时能够带动转动齿轮转动,转动齿轮带动搅拌轴转动,搅拌轴上的搅拌叶片对瓜子进行搅拌,从而提高瓜子的清洗效果。
附图说明
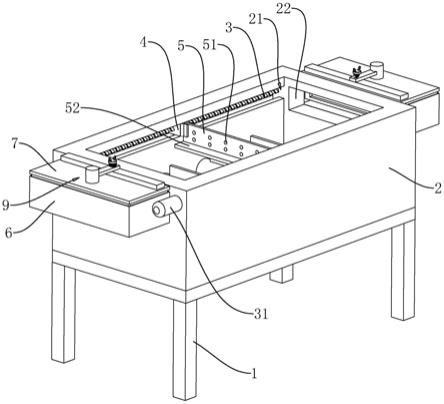
25.图1是本技术实施例的结构示意图。
26.图2是本技术实施例的爆炸示意图。
27.图3是图2中a-a面的剖视示意图。
28.附图标记说明:1、机架;2、清洗箱;21、滑动槽;22、清料口;23、搅拌轴;231、搅拌叶片;24、连接槽;25、转动齿轮;26、连接杆;27、驱动齿条;28、支撑环;3、传动丝杆;31、驱动件;4、滑动块;5、清理板;51、过滤孔;52、置物板;6、容纳盒;61、安装口;7、安装板;71、安装孔;72、限位板;73、限位条;74、密封圈;8、除料盒;81、进料口;82、透水孔;9、定位件;91、定位柱;92、定位杆;93、定位螺栓;94、紧固弹簧。
具体实施方式
29.以下结合附图1-3对本技术作进一步详细说明。
30.本技术实施例公开一种瓜子自动清洗机。参照图1,包括放置于地面上的机架1以及固定连接于机架1上端面的呈长方体状的清洗箱2,清洗箱2内部中空且开口朝上,清洗箱2内装有用于清洗瓜子的水。
31.参照图2和图3,清洗箱2两侧长边的相向两内壁上均沿自身长度方向开设有滑动槽21,每个滑动槽21内均滑动设置有滑动块4。每个滑动块4均螺纹连接有传动丝杆3,每个传动丝杆3均沿清洗箱2的长度方向转动设置于滑动槽21内。传动丝杆3的一端均从清洗箱2的短边外侧壁伸出,清洗箱2短边的外侧壁安装有用于驱动传动丝杆3转动的驱动件31,驱动件31包括两个能够正反转的伺服电机,伺服电机的输出轴与传动丝杆3固定连接。两个滑动块4之间固定连接有呈矩形的清理板5,清理板5的下端伸入水位下,清理板5上均匀开设有若干个过滤孔51。清理板5的下端沿自身长度方向垂直固定连接有呈矩形的置物板52,置物板52与清理板5形成“t”形。清洗瓜子时,瓜子中的杂物会上浮至水面上,驱动件31带动传动丝杆3转动,传动丝杆3通过滑动块4带动清理板5在清洗箱2内移动,清理板5能够对清洗箱2水面上的杂物进行收集并推至清洗箱2的一端,从而便于工作人员对杂物的清理,提高对杂物的清理效率。
32.参照图2和图3,清洗箱2两侧短边的相向两内侧壁上均开设有供置物板52插入的清料口22,清洗箱2短边的外侧壁均固定连接有与清料口22连通的呈长方体状的容纳盒6。容纳盒6的上端面开设有呈矩形的安装口61,容纳盒6的上端面放置有用于封闭安装口61的呈矩形的安装板7,安装板7朝向除料盒8的一侧沿周向固定连接有由硅胶材质制成的密封圈74,密封圈74与容纳盒6的上端面紧贴。安装板7朝向容纳盒6的一侧固定连接有呈长方体
状的除料盒8,除料盒8通过安装口61伸入容纳盒6内,除料盒8朝向清料口22的一侧开设有与清料口22连通的进料口81,除料盒8的底壁均匀开设有透水孔82。清理板5移动至滑动槽21的一端,使得置物板52与除料盒8的外底壁紧贴,置物板52上的杂物通过进料口81进入除料盒8内,将除料盒8从容纳盒6内取出,即可将杂物从清洗箱2内取出,省时省力。
33.参照图2,安装板7的上端面设置有限位条73,限位条73朝向安装板7的一侧垂直固定连接有用于封闭进料口81的限位板72,安装板7上开设有供限位板72插入的安装孔71。杂物进入除料盒8内后,将限位板72插入安装孔71内,从而将进料口81封闭,限制杂物通过进料口81从除料盒8内掉出。
34.参照图2,安装板7的上端面设置有用于限制限位板72脱离安装孔71的定位件9,定位件9包括与安装板7上端面转动连接的定位柱91、定位杆92以及定位螺栓93,定位杆92沿水平方向固定连接于定位柱91的外侧壁上,定位螺栓93螺纹连接于定位杆92远离定位柱91的一端,定位螺栓93上套设有紧固弹簧94,紧固弹簧94的一端抵紧定位螺栓93的螺帽、另一端抵紧定位杆92。将限位板72插入安装孔71内后,限位条73与安装板7紧贴,接着转动定位柱91,使得定位螺栓93对准限位条73,然后旋紧定位螺栓93,使得定位螺栓93抵紧限位条73,从而限制限位板72脱离安装孔71;另外,当定位螺栓93抵紧限位条73后,定位杆92可以充当把手,便于工作人员提起除料盒8。
35.参照图2、图3,每个滑动槽21的下端内侧壁均沿清洗箱2的长度方向开设有连接槽24,清洗箱2两侧长边的相向两内侧壁的中部之间沿清洗箱2的长度方向间隔转动设置四个搅拌轴23,每个搅拌轴23的外侧壁均沿周向间隔固定连接有四个用于对瓜子进行搅拌的搅拌叶片231,搅拌轴23的两端均伸入连接槽24内且均套设有转动齿轮25。滑动块4的下端面沿竖直方向固定连接有伸入连接槽24内的连接杆26,连接杆26远离滑动块4的一端垂直固定连接有呈水平设置的驱动齿条27,驱动齿条27与转动齿轮25相互啮合,驱动齿条27朝向连接杆26的一侧设置有支撑环28,支撑环28的内侧壁与连接杆26的外侧壁紧贴。当滑动块4在滑动槽21内移动时,滑动块4带动连接杆26在连接槽24内滑动,连接杆26带动驱动齿条27移动,驱动齿条27经过转动齿轮25时能够带动转动齿轮25转动,转动齿轮25带动搅拌轴23转动,搅拌轴23上的搅拌叶片231对瓜子进行搅拌,从而提高瓜子的清洗效果。
36.本技术实施例一种瓜子自动清洗机的实施原理为:清理水面上的杂物时,启动驱动件31,驱动件31带动传动丝杆3转动,传动丝杆3通过滑动块4带动清理板5在清洗箱2内移动,从而对水面上飘浮的杂物进行收集,当清理板5移动至滑动槽21的一端时,杂物通过进料口81进入除料盒8内,然后将限位板72插入安装孔71内,转动定位柱91,旋紧定位螺栓93,使得定位螺栓93抵紧限位条73,最后用手握住定位杆92并将除料盒8从容纳盒6内取出,即可将杂物从清洗箱2内取出,省时省力。
37.以上均为本技术的较佳实施例,并非依此限制本技术的保护范围,故:凡依本技术的结构、形状、原理所做的等效变化,均应涵盖于本技术的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1