一种淡水鱼综合处理装置
1.本发明涉及鱼产品加工领域,尤其涉及一种淡水鱼综合处理装置。
背景技术:
2.2014年,中国水产科学研究院渔业机械仪器研究所的陈庆余等人发明了
ꢀ“
加工大宗淡水鱼的卧式多级滚筒去鳞设备及其去鳞方法”,并且获得国家发明 专利授权。这项发明为一台滚筒式加工去鱼鳞装置,使用卧式多级滚筒去除鱼 鳞,将鱼类送入不断旋转运动的多级滚筒内,各级滚筒内壁上装有造型多样刮 鳞片刀,在滚动旋转运动时,鱼体与滚筒作相对运动,刮鳞刀便可以将鱼鳞刮 下,在每个筒状连接件的内壁上还设置的有很多轴向的螺旋通道。可以把鱼体 不断向下一级滚筒运送,两套功率大小不同的变频调速动力电机驱动毛刷辊轮 轴系与多级滚筒同轴,毛刷辊轮轴系中的多组毛刷辊轮能够对鱼体进行辅助去 鳞和送料控制;从鱼体表面除落的鱼鳞通过各级去鳞滚筒上的鳞片通孔掉入鱼 鳞沉积槽内方便收集;中心管轴中的压力水流通过其管壁上设置的若干小孔向 着多级滚筒内的加工鱼体喷水冲洗。
[0003][0004]
2011年6月30日,《农业工程学报》2011年第27卷第6期刊登了一篇名 为“链式剖鱼机工艺参数优化试验”的文章,第一作者为华中农业大学工学院谭 鹤群副教授,这篇文章介绍了一种新型的链式剖鱼机,这项研究属于湖北省重 大科技攻关项目“淡水鱼加工技术研究与开发”研究课题的一部分。为了进一步 优化自主研发的6pyl-305型链式剖鱼机,研究者以鲢鱼和鳊鱼为研究对象对 工艺参数进行了试距,得出了剖鱼机运行的最佳工艺。
[0005]
2015年,华中农业大学的一位硕士生张帆在其教授导师宗力的指导下,在 《工业科技》上发表了自己的学位论文,题目为“淡水鱼去头方法及装置设计 试验研究”,提出了一种新型去鱼头装置,以鲢鱼为试验对象,通过对鲢鱼的 体型特征进行分析,测量并采集数据,根据在微机控制电子万能材料试验机上 的相关静态剪切力学特性试验,提出了利用空压机产生的压缩空气来驱动气缸 带动弧形去头刀具进行淡水鱼鱼体去头加工的机械化原理。根据此去头原理方 法设计并研制了一台气动式淡水鱼去头机试验样机。
[0006]
基于现有技术未能实现对淡水鱼综合化处理,单个工艺仅能实现其中一项 工序,还需要人工处理其他工序,容易增加工作人员的劳动强度,且工作效率 低下。因此亟需一款综合了去鳞、剖腹、去内脏、去头去尾的自动化装置来降 低工作人员劳动强度和提高工作效率。
技术实现要素:
[0007]
为了解决上述问题,本发明的目的在于提供一种淡水鱼综合处理装置,通 过去鳞装置对鱼体进行去鳞处理后,在传送装置的驱动下进入传送带,由高清 摄像头识别到鱼尾后,去尾装置切割鱼尾,接着传送带带着鱼体向前移动,经 过剖腹装置处对鱼体进行剖腹处理,接着继续向前,由除脏装置去除鱼体内脏, 鱼体跟随者传送带继续向前移动,接着高
清摄像头识别传送带末端的鱼头,当 识别到鱼鳃后,去头装置将鱼头切下,最后从出口护瓦处滑出机架,并通过紫 外线灯管对机架内部消毒,避免残留的鱼鳞、鱼血等发生变质。
[0008]
为了实现上述目的,本发明提供的一种淡水鱼综合处理装置是这样实现 的:
[0009]
一种淡水鱼综合处理装置,包括机架、旋转电机、第一金属杆、刮鳞刀、 弹簧、链轮、链条、支撑杆、剖腹装置、凸轮、金属支架、出口护瓦、除脏装 置、悬臂、传送带、去头装置、紫外线灯管、高清摄像头、去尾装置、传动装 置、喷淋、工控机,旋转电机和传动装置安装在机架内上方,工控机安装在机 架顶端,由工控机控制旋转电机转动,旋转电机为传动装置传动,第一金属杆 安装在传动装置上,刮鳞刀安装在第一金属杆与弹簧之间,弹簧的另一端安装 在金属支架上,由第一金属杆、刮鳞刀、弹簧组成去鳞装置,采用六组去鳞装 置平分成两组安装在传动装置和金属支架之间,通过安装在金属支架上的四根 支撑杆支撑起传送带,传送带旁边安装有悬臂,悬臂两端安装有去头装置和去 尾装置,除脏装置安装在传送带下方的金属支架上,高清摄像头安装在机架内 上方,用于识别被加工的鱼体,刮鳞刀对鱼体进行去鳞处理后,在传送装置的 驱动下进入传送带,由高清摄像头识别到鱼尾后,去尾装置切割鱼尾,接着传 送带带着鱼体向前移动,经过剖腹装置处对鱼体进行剖腹处理,接着继续向前, 由除脏装置去除鱼体内脏,鱼体跟随者传送带继续向前移动,接着高清摄像头 识别传送带末端的鱼头,当识别到鱼鳃后,去头装置将鱼头切下,最后从出口 护瓦处滑出机架,紫外线灯管安装在机架内上方,用于对机架内部消毒,传送 装置上安装有喷淋,用于冲洗被刮下的鱼鳞。
[0010]
本发明的传动装置包括第一齿轮、轴承、金属支架、链条、链轮,旋转电 机的旋转轴穿过左上方的金属支架与第一齿轮连接,带动左边的第一齿轮转 动,第一齿轮带动第一金属杆转动,第一金属杆带动着刮鳞刀和弹簧转动,进 而带动着左下方的链轮转动,左下方的链轮带动着链条转动,进而为左排的去 鳞装置转动,左边的第一齿轮带动着右边的第一齿轮转动,右边的第一齿轮为 右排的去鳞装置转动,两个去鳞装置反向旋转,进而对鱼体鳞片进行刮除。
[0011]
本发明的第一金属杆与金属支架之间通过轴承连接,弹簧的下端与金属支 架之间通过轴承连接,且链轮穿过弹簧下部分,由链轮带动链条转动,进而使 得其他弹簧、第一金属杆跟着转动。
[0012]
本发明的剖腹装置和除脏装置包括第一步进电机、剖腹圆刀、滚筒、支撑 杆、第二金属杆、支撑板、除脏刀、第三金属杆、凸轮、第三步进电机、喷淋、 金属台、伺服电机、第二步进电机、传送带,第二金属杆、支撑板、第三金属 杆、金属台安装在机架中,第一步进电机安装在支撑板上,第一步进电机的旋 转轴穿过剖腹圆刀后固定在第二金属杆上,由第一步进电机带动着剖腹圆刀对 鱼体进行剖腹处理,两根支撑杆并排安装在机架中,每根支撑杆上安装一个滚 筒,金属台上方并排安装两个伺服电机,每个伺服电机的旋转轴上均安装有一 个滚筒,支撑杆上方的滚筒与伺服电机上方的滚筒通过传送带连接在一起,由 伺服电机带动着滚筒转动,滚筒为传送带传动,再由传送带夹着鱼体移动,第 二步进电机的旋转轴穿过除脏刀后连接在第三金属杆上方,第三金属杆下方安 装凸轮,第三步进电机安装在机架下方,凸轮安装在第三步进电机的旋转轴上, 由第三步进电机带动着凸轮转动,凸轮对第三金属杆产生挤压,进而推动着第 三金属杆上下移动,第三金属杆上还安装有喷淋,用于冲洗鱼体内腔。
[0013]
本发明的去头装置和去尾装置包括去头刀片、轮轴、第四步进电机、第四 金属杆、第五步进电机、倾角传感器、悬臂、去尾刀片、第三齿轮、第二齿轮, 第四金属杆、第五步进电机安装在机架中,第四金属杆顶端安装有悬臂,第五 步进电机的旋转轴与第四金属杆下部分连接,由第五步进电机带动着第四金属 杆转动,第四金属杆带动着悬臂移动,进而控制去头刀片和去尾刀片向前或者 向后移动,第四步进电机安装在悬臂上,去头刀片和去尾刀片之间通过轮轴连 接,第三齿轮安装在轮轴上,第二齿轮安装在第四步进电机的旋转轴上,由第 四步进电机带动第二齿轮转动,第二齿轮为第三齿轮传动,第三齿轮带动着轮 轴转动,进而带动着去头刀片和去尾刀转动,实现对鱼头、鱼尾进行切割,倾 角传感器安装在第四金属杆上,用于检测第四金属杆的倾角,并将检测到的信 息传输至工控机,工控机根据传回来的倾角信息控制第五步进电机转动的角 度,进而实现对第四金属杆倾角的调节,高清摄像头识别到鱼尾经过传送带首 端时,两个伺服电机停止转动,使得传送带停止移动,第五步进电机带动着第 四金属杆转动,使悬臂带动着去尾刀片靠近鱼尾,第四步进电机带动着去尾刀 片对鱼尾进行切割,在切割完鱼尾后,第五步进电机带动着第四金属杆反向转 动,使得去尾刀片、去头刀片远离传送带,接着伺服电机带动着传送带继续移 动,在鱼体经过传送带末端时,高清摄像头检测到鱼鳃出现后,伺服电机控制 传送带停止转动,第五步进电机带动着第四金属杆正向转动,带动去头刀片向 鱼头靠近,第四步进电机带动着去头刀片对鱼尾进行切割,在完成鱼头的切割 工作后,第五步进电机带动着第四金属杆反向转动,使得去尾刀片、去头刀片 远离传送带,接着伺服电机控制传送带继续转动,使鱼体从出口护瓦处送出。
[0014]
本发明的高清摄像头识别鱼头、鱼尾的方案为:先采集没有鱼体经过时的 图像信息,作为背景图存储起来,接着不断的采集传送带上是否有鱼体经过的 图像信息,对采集到的图像进行滤波去噪处理,提高图像的清晰度,利用像素 相减的方法对图像进行分割,将目标与背景分开,得到的目标即为需要处理的 鱼体,通过识别鱼体与传送带之间的距离来判断鱼头和鱼尾,即整个鱼体不同 部位的像素不相同,鱼头和鱼尾处的像素值一般低于鱼身的像素值,当识别到 鱼体与传送带首端的像素差值低于预设值时,表明识别到了鱼尾,当识别到鱼 体与传送带末端的像素差值低于预设值时,表明识别到了鱼头,接着识别鱼鳃 所在位置,在鱼头鱼尾识别的过程中,先识别传送带的首端为鱼尾,识别传送 带末端的为鱼头。
[0015]
由于本发明采用去鳞装置、剖腹装置、除脏装置对鱼体进行综合处理的结 构,从而可以得到以下有益效果:
[0016]
1.本发明是利用人体工程学并结合机器人设计原理设计而成的一种鱼体综 合处理装置,它是以生活中人的运动方式、行为特点、生理结构等为设计基础, 设计出的一种能够实现去鳞、剖腹去内脏、去头去尾等基本功能的电动机械装 置。能够快速地在短时间内完成去鳞、剖腹去内脏、去头去尾等任务,并反馈 给人类,能有效提高草鱼的加工效率、减轻工人的劳动负担。
[0017]
2.本发明通过紫外线灯管对鱼体去机架内部进行消毒处理,可以避免残留 的鱼鳞、鱼血等发生变质。
附图说明
[0018]
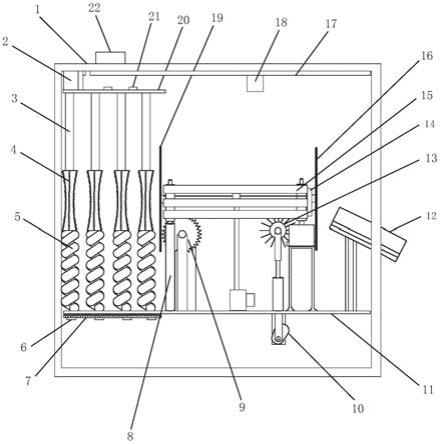
图1为本发明一种淡水鱼综合处理装置的整体结构示意图;
[0019]
图2、图3为本发明一种淡水鱼综合处理装置的传动装置的结构示意图;
[0020]
图4、图5为本发明一种淡水鱼综合处理装置的剖腹装置和除脏装置的结 构示意图;
[0021]
图6为本发明一种淡水鱼综合处理装置的凸轮的结构示意图;
[0022]
图7、图8为本发明一种淡水鱼综合处理装置的去头装置和去尾装置的结 构示意图;
[0023]
图9为本发明一种淡水鱼综合处理装置的高清摄像头识别鱼头、鱼尾的方 案流程图;
[0024]
图10为本发明一种淡水鱼综合处理装置的工作原理图。
[0025]
主要元件符号说明。
[0026]
[0027]
具体实施方式
[0028]
下面结合实施例并对照附图对本发明作进一步详细说明。
[0029]
请参阅图1至图10所示为本发明中的一种淡水鱼综合处理装置,包括机 架1、旋转电机2、第一金属杆3、刮鳞刀4、弹簧5、链轮6、链条7、支撑杆 8、剖腹装置9、凸轮10、金属支架11、出口护瓦12、除脏装置13、悬臂14、 传送带15、去头装置16、紫外线灯管17、高清摄像头18、去尾装置19、传动 装置20、喷淋21、工控机22。
[0030]
如图1所示,所述的旋转电机2和传动装置20安装在机架1内上方,工 控机22安装在机架1顶端,由工控机22控制旋转电机2转动,旋转电机2为 传动装置20传动,第一金属杆3安装在传动装置20上,刮鳞刀4安装在第一 金属杆3与弹簧5之间,弹簧5的另一端安装在金属支架11上,由第一金属 杆3、刮鳞刀4、弹簧5组成去鳞装置,采用六组去鳞装置平分成两组安装在 传动装置20和金属支架11之间,通过安装在金属支架11上的四根支撑杆8 支撑起传送带15,传送带15旁边安装有悬臂14,悬臂14两端安装有去头装 置16和去尾装置19,除脏装置13安装在传送带15下方的金属支架11上,高 清摄像头18安装在机架1内上方,用于识别被加工的鱼体,刮鳞刀4对鱼体 进行去鳞处理后,在传送装置的驱动下进入传送带15,由高清摄像头18识别 到鱼尾后,去尾装置19切割鱼尾,接着传送带15带着鱼体向前移动,经过剖 腹装置9处对鱼体进行剖腹处理,接着继续向前,由除脏装置13去除鱼体内 脏,鱼体跟随者传送带15继续向前移动,接着高清摄像头18识别传送带15 末端的鱼头,当识别到鱼鳃后,去头装置16将鱼头切下,最后从出口护瓦12 处滑出机架1,紫外线灯管17安装在机架1内上方,用于对机架1内部消毒, 避免残留的鱼鳞、鱼血等发生变质,传送装置上安装有喷淋21,用于冲洗被刮 下的鱼鳞。能够快速地在短时间内完成去鳞、剖腹去内脏、去头去尾等任务, 并反馈给人类,能有效提高草鱼的加工效率、减轻工人的劳动负担。
[0031]
如图2所示,所述的传动装置20包括第一齿轮23、轴承24、金属支架11、 链条7、链轮6,旋转电机2的旋转轴穿过左上方的金属支架11与第一齿轮23 连接,带动左边的第一齿轮23转动,第一齿轮23带动第一金属杆3转动,第 一金属杆3带动着刮鳞刀4和弹簧5转动,
进而带动着左下方的链轮6转动, 左下方的链轮6带动着链条7转动,进而为左排的去鳞装置转动,左边的第一 齿轮23带动着右边的第一齿轮23转动,右边的第一齿轮23为右排的去鳞装 置转动,两个去鳞装置反向旋转,进而对鱼体鳞片进行刮除。链条7采用的是 08a滚子链,链轮6的齿数为17。
[0032]
如图2、图3所示,所述的第一金属杆3与金属支架11之间通过轴承24 连接,弹簧5的下端与金属支架11之间通过轴承24连接,且链轮6穿过弹簧 5下部分,由链轮6带动链条7转动,进而使得其他弹簧5、第一金属杆3、刮 鳞刀4跟着转动。两排的刮鳞刀4相对旋转可以让刮鳞刀4具有进给作用,可 以一边去除鱼鳞一边将鱼体往下一部分送,保证鱼体加工的连续性。
[0033]
如图4、图5所示,所述的剖腹装置9和除脏装置13包括第一步进电机 25、剖腹圆刀26、滚筒27、支撑杆8、第二金属杆28、支撑板29、除脏刀30、 第三金属杆31、凸轮10、第三步进电机32、喷淋21、金属台33、伺服电机34、第二步进电机35、传送带15,第二金属杆28、支撑板29、第三金属杆31、 金属台33安装在机架1中,第一步进电机25安装在支撑板29上,第一步进 电机25的旋转轴穿过剖腹圆刀26后固定在第二金属杆28上,由第一步进电 机25带动着剖腹圆刀26对鱼体进行剖腹处理,两根支撑杆8并排安装在机架 1中,每根支撑杆8上安装一个滚筒27,金属台33上方并排安装两个伺服电 机34,每个伺服电机34的旋转轴上均安装有一个滚筒27,支撑杆8上方的滚 筒27与伺服电机34上方的滚筒27通过传送带15连接在一起,由伺服电机34 带动着滚筒27转动,滚筒27为传送带15传动,再由传送带15夹着鱼体移动, 两个伺服电机34反向转动,使得两条传送带15跟着反向移动,能够带动着鱼 体往同一个方向移动,第二步进电机35的旋转轴穿过除脏刀30后连接在第三 金属杆31上方,用于去除鱼体内脏,第三金属杆31下方安装凸轮10,第三步 进电机32安装在机架1下方,凸轮10安装在第三步进电机32的旋转轴上, 由第三步进电机32带动着凸轮10转动,凸轮10对第三金属杆31产生挤压, 进而推动着第三金属杆31上下移动,第三金属杆31上还安装有喷淋21,用于 冲洗鱼体内腔。
[0034]
如图6所示,所述的凸轮10是为了方便除脏刀30上下移动,设计使用凸 轮10机构,将除脏刀30与控制其旋转的第三步进电机32作为一部分,由凸 轮10控制除脏刀30部分的上升或下降,凸轮10的小圆半径为25毫米,大圆 半径为30毫米,大小圆圆心相距30毫米。
[0035]
如图7、图8所示,所述的去头装置16和去尾装置19包括去头刀片36、 轮轴37、第四步进电机38、第四金属杆39、第五步进电机40、倾角传感器41、 悬臂14、去尾刀片42、第三齿轮43、第二齿轮44,第四金属杆39、第五步进 电机40安装在机架1中,第四金属杆39顶端安装有悬臂14,第五步进电机 40的旋转轴与第四金属杆39下部分连接,由第五步进电机40带动着第四金属 杆39转动,第四金属杆39带动着悬臂14移动,进而控制去头刀片36和去尾 刀片42向前或者向后移动,第四步进电机38安装在悬臂14上,去头刀片36 和去尾刀片42之间通过轮轴37连接,第三齿轮43安装在轮轴37上,第二齿 轮44安装在第四步进电机38的旋转轴上,由第四步进电机38带动第二齿轮 44转动,第二齿轮44为第三齿轮43传动,第三齿轮43带动着轮轴37转动, 进而带动着去头刀片36和去尾刀转动,实现对鱼头、鱼尾进行切割,倾角传 感器41安装在第四金属杆39上,用于检测第四金属杆39的倾角,并将检测 到的信息传输至工控机22,工控机22根据传回来的倾角信息控制第五步进电 机40转动的角度,进而实现对第四金属杆39倾角的调节,高清摄像头18识 别到鱼尾经过传送带15首端时,两
个伺服电机34停止转动,使得传送带15 停止移动,第五步进电机40带动着第四金属杆39转动,使悬臂14带动着去 尾刀片42靠近鱼尾,第四步进电机38带动着去尾刀片42对鱼尾进行切割, 在切割完鱼尾后,第五步进电机40带动着第四金属杆39反向转动,使得去尾 刀片42、去头刀片36远离传送带15,接着伺服电机34带动着传送带15继续 移动,在鱼体经过传送带15末端时,高清摄像头18检测到鱼鳃出现后,伺服 电机34控制传送带15停止转动,第五步进电机40带动着第四金属杆39正向 转动,带动去头刀片36向鱼头靠近,第四步进电机38带动着去头刀片36对 鱼尾进行切割,在完成鱼头的切割工作后,第五步进电机40带动着第四金属 杆39反向转动,使得去尾刀片42、去头刀片36远离传送带15,接着伺服电 机34控制传送带1 5继续转动,使鱼体从出口护瓦12处送出。
[0036]
如图9所示,所述的高清摄像头18识别鱼头、鱼尾的方案为:先采集没 有鱼体经过时的图像信息,作为背景图存储起来,接着不断的采集传送带15 上是否有鱼体经过的图像信息,对采集到的图像进行滤波去噪处理,提高图像 的清晰度,利用像素相减的方法对图像进行分割,将目标与背景分开,得到的 目标即为需要处理的鱼体,通过识别鱼体与传送带15之间的距离来判断鱼头 和鱼尾,即整个鱼体不同部位的像素不相同,鱼头和鱼尾处的像素值一般低于 鱼身的像素值,当识别到鱼体与传送带15首端的像素差值低于预设值时,表 明识别到了鱼尾,当识别到鱼体与传送带15末端的像素差值低于预设值时, 表明识别到了鱼头,接着识别鱼鳃所在位置,在鱼头鱼尾识别的过程中,先识 别传送带15的首端为鱼尾,识别传送带15末端的为鱼头。
[0037]
本发明的工作原理与工作过程如下:
[0038]
由工控机22控制旋转电机2转动,带动左边的第一齿轮23转动,第一齿 轮23带动第一金属杆3转动,第一金属杆3带动着刮鳞刀4和弹簧5转动, 进而带动着左下方的链轮6转动,左下方的链轮6带动着链条7转动,进而为 左排的去鳞装置转动,左边的第一齿轮23带动着右边的第一齿轮23转动,右 边的第一齿轮23为右排的去鳞装置转动,两个去鳞装置反向旋转,进而对鱼 体鳞片进行刮除,高清摄像头18先采集没有鱼体经过时的图像信息传送至工 控机22,作为背景图存储起来,接着不断的采集传送带15上是否有鱼体经过 的图像信息传输至工控机22,在工控机22中设置图像处理程序对采集到的图 像进行鱼头、鱼尾识别当识别到鱼体与传送带15首端的像素差值低于预设值 时,表明识别到了鱼尾,工控机22控制两个伺服电机34停止转动,使得传送 带15停止移动,接着工控机22控制第五步进电机40带动着第四金属杆39转 动,使悬臂14带动着去尾刀片42靠近鱼尾,由工控机22控制第四步进电机 38带动着去尾刀片42对鱼尾进行切割,在切割完鱼尾后,工控机22控制第五 步进电机40带动着第四金属杆39反向转动,使得去尾刀片42、去头刀片36 远离传送带15,接着工控机22控制伺服电机34带动着传送带15继续移动, 倾角传感器41用于检测第四金属杆39的倾角,并将检测到的信息传输至工控 机22,工控机22根据传回来的倾角信息控制第五步进电机40转动的角度,进 而实现对第四金属杆39倾角的调节,由工控机22控制第一步进电机25带动 着剖腹圆刀26对鱼体进行剖腹处理,接着工控机22控制三步进电机带动着凸 轮10转动,凸轮10对第三金属杆31产生挤压,进而推动着第三金属杆31上 下移动,再控制第二步进电机35带动着除脏刀30旋转,进而去除鱼体内脏, 在鱼体经过传送带15末端时,高清摄像头18检测到鱼鳃出现后,工控机22 控制伺服电机34控制传送带15停止转动,并控制第五步进电机40带动着第 四金属杆39正向转动,带动去头刀片36向鱼头靠近,控制
第四步进电机38 带动着去头刀片36对鱼尾进行切割,在完成鱼头的切割工作后,工控机22控 制第五步进电机40带动着第四金属杆39反向转动,使得去尾刀片42、去头刀 片36远离传送带15,接着工控机22控制伺服电机34去控制传送带15继续转 动,使鱼体从出口护瓦12处送出,工控机22并紫外线灯管17对机架1内部 消毒。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1