一种对虾自适应剥壳装置的制作方法
1.本发明涉及一种水产机械,特别是一种基于多工位动态协同的对虾自适应剥壳装置。
背景技术:
2.对虾壳薄体肥,含肉率高,肉质鲜美,营养丰富,深受消费者喜爱。对虾是全球需求量最大的水产品之一。冻虾仁因其易保鲜、方便食用、方便运输等优势占据绝对的市场优势,是对虾收获后粗加工的重要产品。
3.现有技术的对虾脱壳方法是将虾速冻之后解冻再进行人工剥壳,人工脱壳不仅劳动强度大,生产效率低,还极易污染对虾产品。随着对虾加工产业的快速发展以及劳动力成本的上升,以手工剥制为主要方式的生产模式已经不能满足对虾剥制生产的要求。在机械化剥壳中较多使用揉搓方式去壳,不仅不能去除虾线,虾仁破损率也比较高。
技术实现要素:
4.本发明所要解决的技术问题是针对现有技术的上述缺陷,提供一种基于多工位动态协同的对虾自适应剥壳装置和方法,能够完成对虾的机械化自动剥壳,主要包括基于虾线位置的对虾开背、去肠线、取仁、收集的机械化。
5.为了实现上述目的,本发明提供了一种对虾自适应剥壳装置,其中,多工位动态协同自动完成基于虾线位置的对虾开背、去肠线、取仁及收集,所述对虾自适应剥壳装置包括:
6.机架;
7.协同控制机构,包括加工盘、控制电机和控制器,所述加工盘安装在所述机架上,所述控制器安装在所述加工盘上并与所述控制电机连接,所述控制电机安装在所述加工盘上并带动所述加工盘转动;
8.多个夹持机构,位于机架顶部,每个所述夹持机构包括夹持杆、夹持爪和夹持步进电机,所述夹持杆的两端分别设置所述夹持爪,所述夹持步进电机与所述夹持杆连接,并控制所述夹持爪转动;
9.多个开背机构,分别对应于每个所述夹持机构设置,每个所述开背机构包括检测装置、开背刀和开背直线电机,所述开背刀安装在所述开背直线电机上并固定在所述加工盘上;所述检测装置安装在所述夹持杆上并位于与所述夹持爪相对的一侧;所述开背刀的刀刃方向与所述加工盘的运动方向相同;
10.多个取仁机构,分别设置于每个所述开背机构的一侧,每个所述取仁机构包括取仁器和取仁气缸,所述取仁器与所述取仁气缸连接,所述取仁气缸安装在所述加工盘上;
11.多个去肠线机构,位于所述机架上方,每个所述去肠线机构包括水射流管道和万向器,所述水射流管道与气泵和储水器连接,所述水射流管道位于所述开背刀和所述夹持爪上方;以及
12.分离机构,包括虾仁收集斗和多个虾壳去除单元,每个所述虾壳去除单元分别位于每个所述夹持爪的一侧,所述虾仁收集斗安装在所述机架上,并位于所述夹持爪与取仁器作业正下方。
13.上述的对虾自适应剥壳装置,其中,所述虾壳去除单元包括虾壳去除辊和旋转电机,所述旋转电机安装在所述机架上,所述虾壳去除辊与所述旋转电机的转轴连接。
14.上述的对虾自适应剥壳装置,其中,所述取仁器的中心线和所述开背刀的轴线平行,且与所述加工盘的直径方向具有一夹角。
15.上述的对虾自适应剥壳装置,其中,所述加工盘位于所述机架的中心位置,多个所述夹持机构均匀分布在所述加工盘上。
16.上述的对虾自适应剥壳装置,其中,所述开背刀的轴线和所述加工盘直径方向重合,所述步进电机控制所述开背刀完成对虾开背进深调节。
17.上述的对虾自适应剥壳装置,其中,所述对虾开背进深的控制函数y为以对虾第七节和第六节连接处为起点的x的函数,所述控制函数y包括y1、y2与y3,分别满足如下函数关系式:
[0018][0019]
其中a=5;
[0020]
b1=-0.38459
±
0.06685;
[0021]
b2=0.01437
±
0.00663;
[0022]
b3=-2.25232
*
10-4
±
2.02719
*
10-4
;
[0023]
b4=1.32031
*
10-6
±
1.89168
*
10-6
;
[0024]
拟合优度r2=0.95399;
[0025][0026]
其中a=5;
[0027]
b1=0.01066
±
0.0133;
[0028]
b2=-0.00607
±
7.73394
*
10-4
;
[0029]
b3=1.29373
*
10-4
±
1.39857
*
10-5
;
[0030]
b4=-7.37487
*
10-7
±
7.90097
*
10-8
;
[0031]
拟合优度r2=0.9711;
[0032][0033]
其中a=6;
[0034]
b1=0.1828
±
0.05716;
[0035]
b2=-0.02557
±
0.00449;
[0036]
b3=6.44459
*
10-4
±
1.11711
*
10-4
;
[0037]
b4=-4.73498
*
10-6
±
8.75474
*
10-7
;
[0038]
拟合优度r2=0.96;
[0039]
上述的对虾自适应剥壳装置,其中,所述开背刀的刀头角度为α2=35
°
,所述夹持爪为半扇形结构,所述夹持爪的扇形张角α3=50
°
,半径r=120mm。
[0040]
上述的对虾自适应剥壳装置,其中,所述加工盘和所述夹持爪反向转动,且所述夹
持步进电机的转动角速度与所述控制电机的转动角速度之比为2:1。
[0041]
上述的对虾自适应剥壳装置,其中,所述取仁器的前端为u型结构,所述u型结构为两个长轴方向重合的椭圆相切所得,其中一椭圆长轴为5mm,短轴为3.5mm;另一椭圆长轴为3mm,短轴为2.5mm。
[0042]
上述的对虾自适应剥壳装置,其中,所述取仁器和加工盘均为尼龙材料件。
[0043]
本发明的技术效果在于:
[0044]
本发明的夹持机构可实现根据已设函数针对每一只虾进行开背深度控制,在最小化伤害虾仁的情况下保证肠线去除的完整性;利用取仁器和虾肉之间的挤压摩擦作用使壳肉分离,气缸控制具有自适应性,可针对每一只虾位置确定开始运动时间和运动距离;夹持机构、开背机构和取仁机构通过多工位多工序动态协同可实现对虾的高效剥壳;多个开背刀和取仁器可同时对多个夹持爪夹持的四只虾进行工作,提高了取仁和壳仁分离的效率;结构简单,剥壳效率高,能够完全实现对虾的自适应开背、去肠线、取仁、收集的机械化,有利于保证加工质量,提高剥制效率,降低成本,满足市场需求,具有良好的经济效益和社会效益。
[0045]
以下结合附图和具体实施例对本发明进行详细描述,但不作为对本发明的限定。
附图说明
[0046]
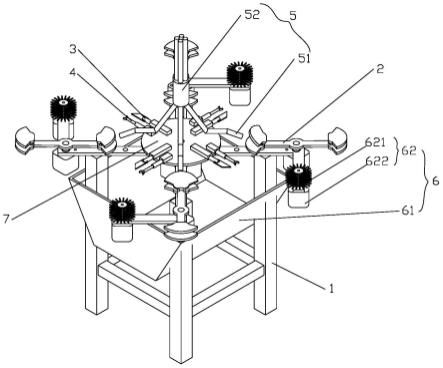
图1为本发明一实施例的结构示意图;
[0047]
图2为本发明一实施例的夹持机构结构示意图;
[0048]
图3为本发明一实施例的俯视图;
[0049]
图4为本发明一实施例的取仁机构运动原理图;
[0050]
图5为本发明一实施例的取仁机构结构示意图;
[0051]
图6为本发明一实施例的协同控制机构结构示意图;
[0052]
图7为本发明一实施例的开背深度控制原理图。
[0053]
其中,图中标记
[0054]
1机架
[0055]
2夹持机构
[0056]
21夹持爪
[0057]
22夹持步进电机
[0058]
23夹持杆
[0059]
3开背机构
[0060]
31检测装置
[0061]
32开背直线电机
[0062]
33开背刀
[0063]
4取仁机构
[0064]
41固定座
[0065]
42取仁气缸
[0066]
43取仁器(起始位置)
[0067]
44取仁器(工作位置)
[0068]
45u型结构
[0069]
5去肠线机构
[0070]
51水射流管道
[0071]
52万向器
[0072]
6分离机构
[0073]
61虾仁收集斗
[0074]
62虾壳去除单元
[0075]
621虾壳去除辊
[0076]
622旋转电机
[0077]
7协同控制机构
[0078]
71加工盘
[0079]
72控制电机
[0080]
73控制器
具体实施方式
[0081]
下面结合附图对本发明的结构原理和工作原理作具体的描述:
[0082]
参见图1-图6,图1为本发明一实施例的结构示意图,图2为本发明一实施例的夹持机构2结构示意图,图3为本发明一实施例的俯视图,图4为本发明一实施例的取仁机构4运动原理图,图5为本发明一实施例的取仁机构4结构示意图,图6为本发明一实施例的协同控制机构7结构示意图。本发明的对虾自适应剥壳装置,多工位动态协同自动完成基于虾线位置的对虾开背、去肠线、取仁及收集,所述对虾自适应剥壳装置包括:机架1;协同控制机构7,位于整机中部位置,包括加工盘71、控制电机72和控制器73,所述加工盘71安装在所述机架1上,所述控制器73安装在所述加工盘71上并与所述控制电机72连接,位置位于中心部位,以不影响开背刀33和取仁器43工作为原则安置,所述控制电机72安装在所述加工盘71上并带动所述加工盘71转动;多个夹持机构2,位于机架1顶部,每个所述夹持机构2包括夹持杆23、夹持爪21和可控制转角的夹持步进电机22,所述夹持杆23的两端分别设置所述夹持爪21,所述夹持步进电机22与所述夹持杆23连接,并控制所述夹持爪21转动,夹持爪21与进料机构配合完成夹持;多个开背机构3,分别对应于每个所述夹持机构2设置,每个所述开背机构3包括检测装置31、开背刀33和开背直线电机32,所述开背刀33安装在所述开背直线电机32上,开背直线电机32固定在所述加工盘71上用于调节开背进深;所述检测装置31安装在所述夹持杆23上并位于与所述夹持爪21相对的一侧,该检测装置31优选为安装在夹持爪21下方的传感器,可以进行质量和对虾位置测量;所述开背刀33的刀刃方向与所述加工盘71的运动方向相同;多个取仁机构4,分别设置于每个所述开背机构3的一侧,每个所述取仁机构4包括取仁器43和取仁气缸42,所述取仁器43与所述取仁气缸42连接,所述取仁气缸42安装在所述加工盘71上用于控制取仁器43做伸缩运动;多个去肠线机构5,位于所述机架1上方,每个所述去肠线机构5包括水射流管道51和万向器52,所述水射流管道51通过水管与气泵和储水器连接,所述气泵和所述储水器独立于所述对虾剥壳装置外,依据加工场地条件安置,所述水射流管道51位于所述开背刀33和所述夹持爪21上方;以及分离机构6,包括虾仁收集斗61和多个虾壳去除单元62,每个所述虾壳去除单元62分别位于每个所述夹持
爪21的一侧,所述虾仁收集斗61安装在所述机架1上,并位于所述夹持爪21与取仁器43作业正下方。
[0083]
本实施例中,所述虾壳去除单元62包括虾壳去除辊621和旋转电机622,所述旋转电机622安装在所述机架1上,所述虾壳去除辊621与所述旋转电机622的转轴连接。所述虾壳去除辊621位于所述夹持爪21与开背刀33作业处的一侧。
[0084]
参见图3,本实施例中,所述加工盘71位于所述机架1的中心位置,多个所述夹持机构2均匀分布在所述加工盘71上。优选夹持机构2为四个均布在所述加工盘71上,开背机构3、取仁机构4、水射流管道51和虾壳去除单元62均为四个,分别对应一个夹持机构2设置。所述加工盘71和所述夹持爪21反向转动,且所述夹持步进电机22的转动角速度与所述控制电机72的转动角速度之比优选为2:1。所述取仁器43和加工盘71均优选为尼龙材料件。所述开背刀33的轴线和所述加工盘71直径方向重合,所述步进电机控制所述开背刀33完成对虾开背进深调节。所述开背刀33刀头角度优选为α2=35
°
,所述夹持爪21优选为半扇形结构,优选所述夹持爪21的扇形张角α3=50
°
,半径r=120mm。
[0085]
参见图5,本实施例的取仁器43在所述开背刀33的一侧,所述取仁器43的前端接触虾体部位为u型结构45,所述u型结构45为两个长轴方向重合的椭圆相切所得,其中一椭圆长轴优选为5mm,短轴优选为3.5mm;另一椭圆长轴优选为3mm,短轴优选为2.5mm。优选取仁器43和所述开背刀33的所在轴线位置平行,即所述取仁器43的中心线和所述开背刀33的轴线平行,且与所述加工盘71的直径方向具有一夹角,使得取仁器43在与虾体接触时为锐角接触,避免机器运动死点。为保证开背和取仁工序的顺利进行,加工盘71与夹持机构2转向相反。参见图4,工作时,取仁气缸42根据控制器73指令,判断开始运动时间,取仁气缸42伸缩使从取仁器(起始位置)43运动到取仁器(工作位置)44,取仁器43在取仁气缸42的作用下进行伸缩运动,对虾肉产生背离虾壳和夹持爪21的力,利用取仁器43端部u型结构45和虾肉之间的挤压摩擦作用使壳肉分离,完成取仁动作。
[0086]
参见图7,图7为本发明一实施例的开背深度控制原理图。所述对虾开背进深的控制函数y为以对虾第七节和第六节连接处为起点的x的函数,所述控制函数y包括y1、y2与y3,分别满足如下函数关系式:
[0087][0088]
其中a=5;
[0089]
b1=-0.38459
±
0.06685;
[0090]
b2=0.01437
±
0.00663;
[0091]
b3=-2.25232
*
10-4
±
2.02719
*
10-4
;
[0092]
b4=1.32031
*
10-6
±
1.89168
*
10-6
;
[0093]
拟合优度r2=0.95399;
[0094][0095]
其中a=5;
[0096]
b1=0.01066
±
0.0133;
[0097]
b2=-0.00607
±
7.73394
*
10-4
;
[0098]
b3=1.29373
*
10-4
±
1.39857
*
10-5
;
[0099]
b4=-7.37487
*
10-7
±
7.90097
*
10-8
;
[0100]
拟合优度r2=0.9711;
[0101][0102]
其中a=6;
[0103]
b1=0.1828
±
0.05716;
[0104]
b2=-0.02557
±
0.00449;
[0105]
b3=6.44459
*
10-4
±
1.11711
*
10-4
;
[0106]
b4=-4.73498
*
10-6
±
8.75474
*
10-7
;
[0107]
拟合优度r2=0.96;
[0108]
控制器73读取传感器上的去头虾仁质量信息,当满足m《13g时,遵循y1函数,并根据传感器上对虾位置的信息,确定对虾位置,结合函数y1,控制开背直线电机32运动,实现对虾开背深度控制。同理,当13g《m《20g时,遵循函数y2,m》20g,遵循函数y3。
[0109]
工作时,夹持机构2的夹持爪21张开,将虾体夹住,夹持爪21下方的检测装置31包括重量感知传感器和位置感知传感器工作,将该只对虾的重量和位置信息传到控制器73,同时,夹持爪21旋转180
°
至工作处,加工盘71保持匀速旋转,调节加工盘71位置与夹持机构2配合,控制器73根据设定的控制策略运行,计算选择该只虾对应的分级信息,从而确定对虾开背深度控制曲线,控制器73根据y函数和对虾位置信息控制开背直线电机32运动,从而达到控制开背深度的目的。开背过程中,控制器73判断对虾位置控制取仁气缸42启动,使取仁器(初始位置)43运动至取仁器(工作位置)44并完成取仁。虾仁收集斗61收集虾仁,虾壳去除辊621持续旋转清理夹持爪21。在夹持爪21进行开背和取仁过程中,位于夹持杆23另一端的夹持爪21上的虾体重复上述过程,完成夹持机构2不间歇夹持及后续工序。在工作过程中,去肠线机构5持续运作,水射流管道51持续出水。至此,一个夹持机构2上的一只虾完成剥壳工序。整机工作过程中,四个夹持机构2的八个夹持爪21同时不间歇的工作。
[0110]
本发明结构简单,剥壳效率高,能够自动实现对虾的夹持,可根据虾线位置实现对虾的自适应开背、去肠线、取仁、收集的机械化。
[0111]
当然,本发明还可有其它多种实施例,在不背离本发明精神及其实质的情况下,熟悉本领域的技术人员当可根据本发明作出各种相应的改变和变形,但这些相应的改变和变形都应属于本发明所附的权利要求的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1