一种蛋糕机器人的制作方法
1.本发明涉及一种蛋糕自动化加工领域,特别涉及一种蛋糕机器人。
背景技术:
2.蛋糕我们日常生活中比较常见的甜品,以生日蛋糕为例,为了提高其观赏性,往往在生日蛋糕表面进行淋面、裱花装饰。
3.目前市面上大部分自动蛋糕机为带烘焙功能的简易蛋糕机,这些简易的蛋糕机可自动注入蛋糕液进行烘烤,但是这些蛋糕机并没有自动淋面、自动裱花等功能,绝大多数时候都是需要手工做蛋糕,手工淋面,手工裱花,手工加榛果花生等碎粒,这样人工制作蛋糕的生产效率较低下,其中传统的蛋糕进行淋面、裱花工艺时,一般都是人工操作,较为耗时耗力,而且还需要工人具有熟练的操作技巧,但即使这样在进行淋面、裱花工艺时,往往也还会不可避免的出现一些意外的人为操作失误,影响蛋糕的美观性,不利于蛋糕的售卖,为实现蛋糕自动化加工,急需解决如下的技术问题;1、目前的蛋糕为方便运送与打包,都会在蛋糕底部放置蛋糕底托,该蛋糕底板包括与蛋糕底部相抵的蛋糕底板以及设置于蛋糕底板下方的打包底座,蛋糕底板的直径小于打包底座,蛋糕底板外周面设有延伸至打包底座的打包环台,使蛋糕在打包时可以在蛋糕底板的打包环台罩上蛋糕保护罩进行定位,然后再在打包底座上进行打包,故在急需一种能通过自动化机械稳定的自动获得蛋糕底托的技术方案。
4.2、由于蛋糕种类与外观的多样性,其裱花或淋面时,所需要的裱花头或淋面头规格也不相同,需花费过多时间在更换不同工具头导致停工;故在对蛋糕自动加工进行研发时,急需一种能自动化更换不同的裱花头或淋面头的技术方案。
5.3、由于奶油罐内的奶油是会被快速消耗,需花费过多时间在消耗的奶油罐内补充奶油导致停工,急需一种自动化快速便捷的补充奶油的技术方案。
6.4、目前在蛋糕中需要手动放入各种果粒(芒果、火龙果、榛果、花生等碎粒),急需一种能通过自动化机械稳定且定量提供果粒的技术方案。
技术实现要素:
7.本发明所要解决的技术问题在于针对上述现有技术的不足,提供一种蛋糕机器人。
8.为实现上述目的,本发明提供了如下技术方案:一种蛋糕机器人,包括工作台,其特征在于:所述工作台上设有可转动的蛋糕工作转台、可自动提供蛋糕底托的蛋糕底托自动给料装置、可自动提供蛋糕胚的蛋糕胚给料装置、第一机械臂与第二机械臂,所述第一机械臂上设有蛋糕夹持爪,所述第一机械臂带动蛋糕夹持爪在空间内做三维运动,进而将蛋糕底托自动给料装置处的蛋糕底托以及蛋糕胚给料装置处的蛋糕胚依次放置到蛋糕工作转台上,所述第二机械臂上设有机械驱动架,所述机械驱动架上设有奶油罐,所述奶油罐出口处可设有与奶油罐可拆卸连接的工具头,所述奶油罐上设有将内部材料从工具头挤出奶
油罐的挤压机构,所述第二机械臂带动奶油罐在空间内做三维运动,进而配合挤压机构将奶油罐内的奶油挤压在蛋糕工作转台上蛋糕胚上,所述蛋糕夹持爪的一端设有将蛋糕胚上的奶油刮平的奶油刮板,所述工作台上设有供奶油罐更换工具头的工具头自动更换装置。
9.采用上述技术方案,第一机械臂带动蛋糕夹持爪将蛋糕底托自动给料装置处的蛋糕底托自动放置到蛋糕工作转台上,再将蛋糕胚给料装置处的蛋糕胚自动放到蛋糕工作转台的蛋糕底托上,蛋糕工作转台带动蛋糕胚自动转动,而第二机械臂通过驱动奶油罐将奶油挤到蛋糕胚上,使其对蛋糕胚进行涂奶油,并通过第一机械臂刮平奶油,同时第二机械臂能通过工具头自动更换装置自动更换不同的工具头,使其能完成抹奶油、淋面、裱花等工艺,使蛋糕底托自动给料装置、蛋糕胚给料装置与第一机械臂配合代替人工的取放蛋糕底托与蛋糕胚的工序,第二机械臂与第一机械臂配合代替人工完成抹奶油、蛋糕装饰等工序,使其自动、高效的机械工装代替了人工复杂的蛋糕胚进行加工工序,避免了人为操作失误,提高了蛋糕的美观性,实现了蛋糕的高效、自动化的加工生产。
10.上述的一种蛋糕机器人,可进一步设置为:所述奶油罐的开口处设有装配管,所述工具头上开设有与装配管相互插接的装配槽,所述工具头自动更换装置包括供奶油罐更换工具头的工具盘以及驱动工具盘转动的驱动模组,所述工具盘上开设有至少两个环绕驱动模组等距分布于工具盘边沿供工具头放置的工具槽,所述工具盘对应每个工具槽处均设有用于将对应工具头限制在工具槽内的工具夹持机构,当第二机械臂与工具槽内的工具头装配后,工具头会随第二机械臂移动进而脱离所述工具槽。
11.采用上述技术方案,工具头主要为奶油挤压头或裱花头或淋面头,第二机械臂自动按照设定轨迹驱动机械驱动架上的奶油罐在空间内做三维运动,由于蛋糕种类与外观的多样性,其裱花或淋面时,所需要的工具头规格也不相同,使奶油罐开口处可以更换不同规格的淋面枪或裱花枪,而奶油罐上的挤压机构能够将内部材料有计量的挤压淋面枪或裱花枪喷淋蛋糕,工具盘上设置多个规格不相同的工具头,该工具头通过工具夹持机构固定在对应工具槽内,工作台处设置驱动模组,当系统需要特定工具头时,工具盘会旋转至对应位置,供机械臂装载或卸载工具头,实现自动化更换工具头,进而简化系统流程,(装载与卸载工具均在同一位置),提高系统响应时间与加工效率。
12.上述的一种蛋糕机器人,可进一步设置为:所述工具夹持机构包括设置在工具槽两侧对应设置的夹爪,所述夹爪均对应铰接于所述工具盘,相对应的夹爪之间设有弹簧,所述夹爪一端延伸至工具槽处并配合形成用于夹持工具头的夹持仿形腔,另一端通过所述弹簧促使相对应的两个夹爪相向运动,所述工具头的外周面设有的环形定位台,所述环形定位台向内凹陷有与工具槽对应设置的让位卡槽,所述环形定位台通过让位卡槽插入所述工具槽内,且使环形定位台部分设置工具盘上方,所述环形定位台下方设有向内凹陷的环形夹持槽,所述夹爪夹设于所述环形夹持槽外周面。
13.采用上述技术方案,通过设置两个相互对应的夹爪,使夹爪通过铆接件在工具盘上转动,而夹爪一端通过弹簧促使另一端的夹爪做相向运动,使其通过夹持仿形腔始终夹住工具头外周面,防止工具盘旋转致使工具头摇晃或甩出,通过弹簧使夹爪始终夹住工具头;而机械臂取出工具头时,只需克服弹簧力就能轻松更换,通过让位卡槽与工具槽插接,使环形定位台部分设置工具盘上方,使工具头被工具盘轴向承托住,通过设置向内凹陷的环形夹持槽,使夹爪能卡接在环形夹持槽外周面,避免其轴向升降与打滑,提高夹持时的稳
定性,防止工具盘旋转致使工具头摇晃或甩出,通过弹簧使夹爪始终夹住工具头。
14.上述的一种蛋糕机器人,可进一步设置为:所述工作台朝向第二机械臂的一端设有备用罐放置架,所述备用罐放置架上装载有若干个奶油罐,所述机械驱动架上设有用于在备用罐放置架处装载或卸载奶油罐的固定机构,所述固定机构包括设置在机械驱动架上的固定驱动源以及两个相对设置的承托夹板,所述固定驱动源通过夹板联动组件驱动两侧的承托夹板相向或相反方向运动,所述机械驱动架上设有驱动挤压机构工作的挤压驱动源,所述挤压机构包括设置在奶油罐内的挤压活塞、与挤压活塞连接的挤压螺杆以及与挤压螺杆啮合的从动齿轮,所述挤压驱动源为电机,所述挤压驱动源的输出端设有与从动齿轮啮合的主动齿轮,并通过驱动主动齿轮转动带动挤压活塞靠近或远离工具头,所述从动齿轮套设于挤压螺杆的外周面,所述从动齿轮的内齿与挤压螺杆啮合,外齿与主动齿轮啮合。
15.采用上述技术方案,第二机械臂自动按照设定轨迹驱动机械驱动架在空间内做三维运动,机械驱动架中的固定机构能够装载与卸载奶油罐,奶油罐上的挤压机构能够将内部材料有计量的挤压淋面枪或裱花枪喷淋蛋糕,使该机械臂能够取代人工,具有效率高、淋面、裱花精美的优点,同时由于奶油罐内的奶油是会被快速消耗,为避免花费过多时间在消耗的奶油罐内补充奶油导致停工,故只在工作台设置供多个奶油罐放置的备用罐放置架,使机械驱动架的固定机构能将消耗掉的奶油罐卸载后,在从备用罐放置架上装载上备用填满奶油的奶油罐,提高其加工效率,同时将挤压驱动源设置于机械驱动架上,使奶油罐上的挤压机构无需配备动力源,只有在装载后才能完成挤压工作,使其合理化的降低设备制备与维修成本,方便的完成蛋糕的涂奶油、裱花、淋面等工艺,在奶油罐内设置用于挤压奶油的挤压活塞,挤压活塞连接一端穿出奶油罐的挤压螺杆,挤压驱动源驱动主动齿轮转动,主动齿轮联动从动齿轮转动,从动齿轮转动过程中会联动与其啮合的挤压螺杆沿奶油罐轴向升降,进而通过挤压活塞将内部的奶油从工具头挤出,从动齿轮套设在挤压螺杆的外周面上,降低了挤压机构的空间,使其更在有限的奶油罐上活动更大的扭矩,且由于其内外齿的联动方式,使从动齿轮在传动时更加稳定,且缩小了奶油罐独立放置时的占用面积,方便在备用罐放置架上放置更多的奶油罐。
16.上述的一种蛋糕机器人,可进一步设置为:所述从动齿轮中心设有与挤压螺杆啮合的内齿定位套,所述奶油罐靠近从动齿轮的一端设有与奶油罐可拆卸连接的罐体盖,所述罐体盖远离挤压活塞的一端延伸有供内齿定位套安装的下定位环座,所述下定位环座与内齿定位套之间设有下定位轴承,所述下定位轴承的外圈与下定位环座相抵,内圈与内齿定位套外壁相抵,所述罐体盖上设有与下定位环座轴向对应设置的上定位环座,所述上定位环座与罐体盖可拆卸连接,所述上定位环座与内齿定位套之间设有上定位轴承,所述上定位轴承的外圈与上定位环座相抵,内圈与内齿定位套外壁相抵,所述机械驱动架上设有承托导向板,所述承托夹板均架设于所述承托导向板上,所述固定驱动源为电机或旋转气缸,所述夹板联动组件包括主动旋臂、左从动臂与右从动臂,所述主动旋臂的中心与固定驱动源的输出端连接,其两端分别铰接有左、右从动臂,所述左、右从动臂的另一端与对应的承托夹板铰接,并通过驱动主动旋臂转动,带动两侧的承托夹板沿承托导向板相向或相反方向运动,所述承托夹板包括用于夹持奶油罐两侧罐壁的夹持板以及用于承托奶油罐底部的承托板,所述工具头与奶油罐的相抵面设有止挡环座,所述承托板上均设有止挡环座相
抵的u型卡板。
17.采用上述技术方案,奶油罐设置可拆卸的罐体盖,方便补充奶油、安装活塞以及清洗罐体内部,而从动齿轮中心设置内齿定位套,使内齿定位套能通过下定位轴承与下定位环座相抵,即将从动齿轮限制到下定位环座内,避免从动齿轮水平方向晃动,提高挤压机构的传动稳定性,同时由于下定位轴承的设置,使其降低了从动齿轮与下定位环座的摩擦力,进一步提高挤压机构的传动效率,通过在罐体盖上设置上定位环座,使内齿定位套能通过上定位轴承与上定位环座相抵,且由于从动齿轮被上定位环座与下定位环座限制到其中间,使从动齿轮即被限制到上、下定位环座内,避免从动齿轮水平方向晃动,也避免其从轴向方向脱出,极大的提高挤压机构的传动稳定性,同时从动齿轮与上定位环座与下定位环座之间优选存有间隙,避免摩擦,且由于上、下定位轴承的设置,使其降低了从动齿轮与上、下定位环座的摩擦力,进一步提高挤压机构的传动效率,承托夹板通过滑台滑块结构架设于承托导向板上,使承托夹板在滑移过程中始终沿承托导向板滑移,固定驱动源会带动主动旋臂中心点转动,主动旋臂转动时,其两端会靠近或远离两侧的承托夹板,当靠近承托夹板时,两侧的左、右从动臂会相互远离,进而带动对应的承托夹板沿承托导向板相反方向运动,进而松开奶油罐,当主动旋臂两端远离承托夹板时,两侧的左、右从动臂会相互靠近,进而带动对应的承托夹板沿承托导向板相向方向运动,进而夹持住奶油罐,因裱花或淋面工艺中,奶油罐会倾斜作业,故通过设置夹持板进而夹住奶油罐两侧罐壁,避免奶油罐从两侧脱出,通过设置承托板将奶油罐底部承托提高奶油罐与机械驱动夹连接的稳定性,也给予挤压机构在挤压过程中的支撑力,通过将奶油罐与工具头之间通过装配管与装配槽实现快速插接,方便快速更换不同规格的工具头,且通过设置o型圈,提高奶油罐与工具头之间的密封性,避免奶油从其连接处溢出,通过还可通过o型圈,将其作用于奶油罐与工具头之间的间隙实现柔性过盈连接,提高工具头装载时的稳定性,通过在工具头设置止挡环座,使承托板通过u型卡板卡接在止挡环座下方,进一步防止在挤奶油过程中工具头从奶油罐上脱出。
18.上述的一种蛋糕机器人,可进一步设置为:所述蛋糕底托自动给料装置包括底部开口的底托储存盒,所述底托储存盒内设有供蛋糕底托轴向叠放的底托落料腔,且蛋糕底板朝向底托落料腔的底部,所述底托储存盒底部设有将底托落料腔内的蛋糕底托逐个送出底托落料腔的自动下料机构,所述自动下料机构包括设置在底托储存盒底部外周面的至少两个拨片以及驱动拨片转动的驱动源,所述拨片上均设有两个轴向分布且错位设置的上齿与下齿,所述驱动源带动拨片转动,驱使所述上齿或下齿与底托落料腔内的打包底座逐个相抵,上齿与下齿之间圆周方向呈90
°
排布,且轴向齿距均小于打包底座到打包环台的距离,底托储存盒一侧开设有与底托落料腔相导通的加料槽,所述蛋糕夹持爪之间形成用于夹持打包环台的底托夹持腔,所述蛋糕夹持爪的侧边与打包底座相抵,所述蛋糕夹持爪上设置控制蛋糕夹持爪张合进而扩大或缩小底托夹持腔的夹持开合电机,所述第一机械臂对应底托夹持腔的一端设有用于插入蛋糕胚内的蛋糕叉。
19.采用上述技术方案,蛋糕底托的蛋糕底板朝向底托落料腔的底部,使每个蛋糕底板与下方的拨片存有供其与上齿与下齿相抵的空间,由于上齿与下齿轴向分布且错位设置,使驱动源带动所有拨片转到一定角度时,此时打包底座与上齿或脱离,使打包底座从拨片的上齿下落至下齿;驱动源带动拨片继续转动或反向转动时,蛋糕底托从下齿掉落至机
械臂上,由机械臂进行下一步操作,进而实现自动逐个给料,上齿与下齿之间圆周方向呈90
°
排布,使驱动源驱动所有拨片在0
°
、90
°
、0
°
来回转动一次就能完成下料,提高给料速度,而上齿与下齿的长度均小于打包底座到打包环台的距离使其不会与蛋糕底板相抵,通过在侧面设置加料槽,使工人可以不需要攀高就能将蛋糕底托轻松便捷的放入底托储存盒内完成补料,通过设置拨片安装座,使驱动源、拨片均设置在上面,使其安装更加稳定,夹持开合电机控制蛋糕夹持爪的张合,适配不同规格的蛋糕加工。
20.上述的一种蛋糕机器人,可进一步设置为:所述拨片均通过共用一个驱动源驱动,所述拨片之间存有联动机构,所述联动机构包括设置拨片上的螺纹轴,所述螺纹轴之间通过连接绳连接并同步转动,所述驱动源驱动其中一个螺纹轴转动,所述底托储存盒外部设有拨片安装座,所述驱动源与拨片均设置于所述拨片安装座上,所述拨片均设置在拨片安装座的下端,所述螺纹轴设置在拨片安装座的上端,且穿过拨片安装座后与拨片固定连接,所述驱动源设置在拨片安装座上端并驱动其中一个螺纹轴转动,所述拨片的数量为3,且环绕分布于拨片安装座上,所述拨片之间的圆心连线呈三角形,所述驱动源为电机或舵机。
21.采用上述技术方案,拨片之间共用一个驱动源,并通过联动机构使各个拨片同步工作,降低成本,提高联动性,螺纹轴与拨片紧固连接(螺栓连接、过盈压紧或键槽连接均可),并同轴转动;其余拨片的螺纹轴之间通过钢丝绳连接,并同步同向转动,使其共用一个驱动源,降低成本,且使各个拨片之间实现同步工作,提高蛋糕底托逐个给料的稳定性,拨片呈三角形分布,同时分担了拨片的受力使拨片承托蛋糕底托时更加稳定,避免蛋糕底托无故脱离底托落料腔。
22.上述的一种蛋糕机器人,可进一步设置为:所述工作台对应第一机械臂的一端设有果粒给料装置,所述果粒给料装置包括设置在工作台上的若干个果粒给料机,所述果粒给料机包括果粒室以及设置在果粒室下方并其相导通的定量盒,所述定量盒轴向两端分别开口,所述定量盒一端设有将定量盒与果粒室隔断上隔板,另一端设有将定量盒底部开口隔断的下隔板,所述定量盒侧边设有置于上、下隔板之间的驱动盒,所述驱动盒内设有驱动上隔板与下隔板交错开闭的隔板驱动机构,所述隔板驱动机构有且只有一个定量驱动源驱动其工作,所述蛋糕夹持爪远离蛋糕刮板的另一侧设有果粒送料盒。
23.采用上述技术方案,工作台上设置多台果粒给料机,每台果粒给料机可存入不同种类的果粒,果粒放置到对应的果粒室中,果粒室与下方的定量盒导通,定量盒两端开口,并通过可活动的上、下隔板打开或密闭定量盒的开口,通过在定量盒一侧设置驱动盒,驱动盒内设置隔板驱动机构,使隔板驱动机构驱动上、下隔板交错开闭,交错开闭指的是当上隔板开闭过程中,下隔板处于闭合状态且不运动,而下隔板开闭过程中,上隔板处于闭合状态且不运动动,进而实现当隔板驱动机构驱动上隔板打开时,下隔板会封闭住定量盒底部,使果粒室内的果粒会进入到定量盒内,通过控制上隔板开闭时间或打开范围,就能控制定量盒内果粒的数量,此时隔板驱动机构再驱动下隔板打开时,就能将定量盒能计量后的果粒送离定量盒,给予到后续第一机械臂的果粒送料盒上,在通过关闭下隔板实现可重复定量的果粒给料,同时隔板驱动机构只采用一个驱动源驱动上、下隔板工作,能极大的解决其占地面积与设备成本的同时实现果粒的自动化给料。
24.上述的一种蛋糕机器人,可进一步设置为:所述联动开闭机构包括设置在驱动盒内的定量驱动源以及与定量驱动源输出端连接的摇杆,所述定量驱动源带动摇杆沿输出端
为支点来回往复摆动,所述上隔板与下隔板上均开设有与摇杆其中一段活动路径相符的让位弧形槽,所述上隔板与下隔板上的让位弧形槽镜像设置,所述摇杆轴向两端分别设有处于同一轴心线上的驱动件,所述驱动件均穿设于上隔板与下隔板的让位弧形槽内,当定量驱动源驱动摇杆往一个方向摆动时,摇杆一端的驱动件将带动上隔板或下隔板打开或关闭定量盒,而另一端的驱动件将沿让位弧形槽摆动。
25.采用上述技术方案,驱动源一端固定在驱动盒上,另一端通过摇杆带动驱动件的行径路线是以输出端为支点作的圆周运动,而上、下隔板上分别截取其圆形行径路径上的镜像分布的两段路径开设让位弧形槽,其让位弧形槽的优选为以定量盒的中心为中心线对称开设的两个镜像设置的让位弧形槽,由于镜像设置的两个让位弧形槽,当驱动源驱动摇杆往一个方向摆动时,摇杆一端的驱动件会顺着让位弧形槽摆动不与这边的隔板其发生干涉,而摇杆的另一端的驱动件将会与让位弧形槽相抵,促使其带动这边的隔板打开或关闭,即当驱动源驱动摆杆逆时针转动时,会带动上隔板回拨,使果粒室和定量盒联通,果粒落入定量盒,而驱动源带动摇杆顺时针转至原点,上隔板回位,阻断果粒室和定量盒,驱动源带动摇杆顺时针转动时,会带动下隔板回拨,定量盒底部打开,果粒从底部滑出,驱动源带动摇杆顺时针转至原点,下隔板回位,关闭定量盒底部,使其只通过一个驱动源完成果粒的定量给料。
26.上述的一种蛋糕机器人,可进一步设置为:所述定量驱动源为双输出轴电机或双输出轴舵机,所述定量驱动源的两个输送轴均安装有所述摇杆,所述驱动件分别设置在两个摇杆上,并插入到对应的让位弧形槽内,所述两个摇杆之间连接有同步支撑臂,所述上隔板与下隔板朝向定量盒的一端设有相互重合的初始定位槽,所述初始定位槽与上隔板、下隔板上的让位弧形槽相导通,所述上隔板和或下隔板朝向定量盒的一端设有果粒切口,所述定量盒的底部开口处设有与定量盒相导通的果粒出料导套,所述下隔板设置于定量盒与果粒出料导套之间,所述工作台对应果粒出料导套的出口处设有果粒落料盘。
27.采用上述技术方案,驱动源为双输出轴电机时,摇杆上会设置原点传感器,并在摇杆上设置感应原点,当摇杆转动到原点传感器位置时,驱动件正好设置在其让位弧形槽的重合部分,此时上隔板与下隔板处于同时关闭状态,驱动源为双输出轴舵机时,由于舵机本身是带角度控制,故可控制角度找到其重合部分,通过在摇杆之间设置同步支撑臂,进行将两个摇杆连接在一起,使其同步摆动的同时又给予其支撑力,提高其工作时的稳定性,由于驱动件的行径路线是以输出端为支点作的圆周运动,而让位槽使截取其行径路线上的一端,在两个让位弧形槽朝向定量盒一端的端部位置设置重合的初始定位槽,让上隔板与下隔板均处于闭合状态时,两端的驱动件能均设置在初始定位槽内,使其能实现原点复位,保证定量盒在不工作时处于密封状态,通过设置斜向导向的果粒出料导套,使其定量盒内的果粒能通过果粒出料导套送至对应的出口处供第一机械臂提取,通过在下方设置果粒落料盘,使果粒从机械臂上掉落后能通过果粒落料盘收集统一处理,由于果粒室内通常会放入切成块状的水果粒,当上隔板打开后,果粒室内的果粒会落入到定量盒内,块状的果粒容易堆叠后超过定量盒高度,通过在上隔板上设置果粒切口,就能将超出的果粒切断,避免果粒阻挡,导致上隔板不能正常将果粒室与定量盒隔断,同时下隔板也可以设置果粒切口方便其将定量盒内的未掉落的果粒切断。
28.下面结合附图对本发明作进一步描述。
附图说明
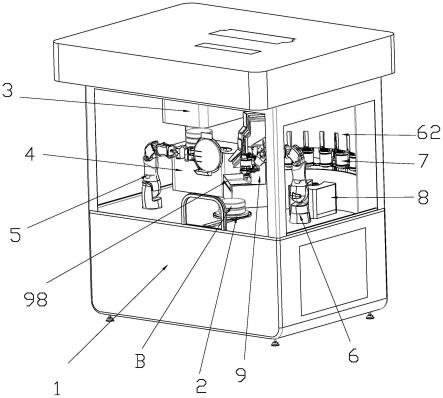
29.图1为本发明实施例的立体示意图。
30.图2为本发明实施例的内部俯视图。
31.图3为本发明实施例第一机械臂的立体示意图。
32.图4为本发明实施例蛋糕底托自动给料装置的结构示意图。
33.图5为本发明实施例自动下料机构的立体示意图。
34.图6为本发明实施例自动下料机构在下料时的状态图。
35.图7为本发明实施例第二机械臂的立体示意图。
36.图8为本发明实施例奶油罐与机械驱动架的立体示意图。
37.图9为本发明实施例奶油罐与机械驱动架的剖视图示意图。
38.图10为本发明实施例工具头自动更换装置的结构示意图。
39.图11为本发明实施例工具头自动更换装置的立体示意图。
40.图12为本发明实施例果粒给料机的结构示意图。
41.图13为本发明实施例隔板驱动机构的立体示意图。
42.图14为本发明实施例隔板驱动机构在上隔板打开时的效果图。
43.图15为本发明实施例隔板驱动机构在下隔板打开时的效果图。
44.图16为本发明实施例隔板驱动机构的结构示意图。
具体实施方式
45.如图3所示,蛋糕底板a包括与蛋糕胚b底部相抵的蛋糕底板a1以及设置于蛋糕底板a1下方的打包底座a2,蛋糕底板a1的直径小于打包底座a2,蛋糕底板a1外周面设有延伸至打包底座a2的打包环台a3。
46.如图1-图16所示,一种蛋糕机器人,包括工作台1,工作台1上设有可转动的蛋糕工作转台2、可自动提供蛋糕底托a的蛋糕底托自动给料装置3、可自动提供蛋糕胚b的蛋糕胚给料装置4、第一机械臂5与第二机械臂6,第一机械臂5上设有蛋糕夹持爪51,第一机械臂5带动蛋糕夹持爪51在空间内做三维运动,进而将蛋糕底托自动给料装置3处的蛋糕底托a以及蛋糕胚给料装置4处的蛋糕胚b依次放置到蛋糕工作转台2上,第二机械臂6上设有机械驱动架61,机械驱动架61上设有奶油罐7,奶油罐7出口处可设有与奶油罐7可拆卸连接的工具头71,奶油罐7上设有将奶油从工具头71挤出奶油罐7的挤压机构,第二机械臂6带动奶油罐7在空间内做三维运动,进而配合挤压机构将奶油罐7内的奶油挤压在蛋糕工作转台2的蛋糕胚b上,蛋糕夹持爪51的一端设有将蛋糕胚b上的奶油刮平的奶油刮板52,另一端设有果粒送料盒53。
47.如图7-图11所示,工作台1上设有供奶油罐7更换工具头71的工具头自动更换装置8,奶油罐7的开口处设有装配管72工具头71上开设有与装配管72相互插接的装配槽711,工具头自动更换装置8包括供奶油罐7更换工具头71的工具盘81以及驱动工具盘81转动的驱动模组82,工具盘81上开设有至少两个环绕驱动模组82等距分布于工具盘81边沿供工具头71放置的工具槽83,工具盘81对应每个工具槽83处均设有用于将对应工具头71限制在工具槽83内的工具夹持机构,当第二机械臂6与工具槽83内的工具头71装配后,工具头71会随第二机械臂6移动进而脱离工具槽83,工具夹持机构包括设置在工具槽83两侧对应设置的夹
爪84,夹爪84均对应铰接于工具盘81,相对应的夹爪84之间设有弹簧(图中暂未装配),夹爪84一端延伸至工具槽83处并配合形成用于夹持工具头71的夹持仿形腔841,另一端通过弹簧促使相对应的两个夹爪84相向运动,工具头71的外周面设有的环形定位台712,环形定位台712向内凹陷有与工具槽83对应设置的让位卡槽713,环形定位台712通过让位卡槽713插入工具槽83内,且使环形定位台712部分设置工具盘81上方,环形定位台712下方设有向内凹陷的环形夹持槽714,夹爪84夹设于环形夹持槽714外周面,工作台1朝向第二机械臂6的一端设有备用罐放置架62,备用罐放置架62上装载有若干个奶油罐7。
48.如图7-图9所示,机械驱动架61上设有用于在备用罐放置架62处装载或卸载奶油罐7的固定机构,固定机构包括设置在机械驱动架61上的固定驱动源63以及两个相对设置的承托夹板64,固定驱动源63通过夹板联动组件驱动两侧的承托夹板64相向或相反方向运动,机械驱动架61上设有驱动挤压机构工作的挤压驱动源65,挤压机构包括设置在奶油罐7内的挤压活塞73、与挤压活塞73连接的挤压螺杆74以及与挤压螺杆74啮合的从动齿轮75,挤压驱动源65为电机,挤压驱动源65的输出端设有与从动齿轮75啮合的主动齿轮651,并通过驱动主动齿轮651转动带动挤压活塞73靠近或远离工具头71,从动齿轮75套设于挤压螺杆74的外周面,从动齿轮75的内齿与挤压螺杆74啮合,外齿与主动齿轮651啮合,从动齿轮75中心设有与挤压螺杆74啮合的内齿定位套751,奶油罐7靠近从动齿轮75的一端设有与奶油罐7可拆卸连接的罐体盖76,罐体盖76远离挤压活塞73的一端延伸有供内齿定位套751安装的下定位环座761,下定位环座761与内齿定位套761之间设有下定位轴承762,下定位轴承762的外圈与下定位环座761相抵,内圈与内齿定位套751外壁相抵,罐体盖76上设有与下定位环座761轴向对应设置的上定位环座763,上定位环座763与罐体盖76可拆卸连接,上定位环座763与内齿定位套751之间设有上定位轴承764,上定位轴承764的外圈与上定位环座763相抵,内圈与内齿定位套751外壁相抵,机械驱动架61上设有承托导向板611,承托夹板64均架设于承托导向板611上,固定驱动源63为电机或旋转气缸,夹板联动组件包括主动旋臂631、左从动臂632与右从动臂633,主动旋臂631的中心与固定驱动源63的输出端连接,其两端分别铰接有左从动臂632与右从动臂633,左从动臂632与右从动臂633的另一端与对应的承托夹板64铰接,并通过驱动主动旋臂631转动,带动两侧的承托夹板64沿承托导向板611相向或相反方向运动,承托夹板64包括用于夹持奶油罐7两侧罐壁的夹持板641以及用于承托奶油罐7底部的承托板642,工具头71与奶油罐7的相抵面设有止挡环座715,承托板642上均设有止挡环座715相抵的u型卡板643。
49.如图3-图6所示,蛋糕底托自动给料装置3包括底部开口的底托储存盒31,底托储存盒31内设有供蛋糕底托a轴向叠放的底托落料腔311,且蛋糕底板a1朝向底托落料腔311的底部,底托储存盒31底部设有将底托落料腔311内的蛋糕底托a逐个送出底托落料腔311的自动下料机构,自动下料机构包括设置在底托储存盒31底部外周面的拨片安装座32、设置在拨片安装座32上的三个拨片33以及驱动拨片33转动的驱动源34,拨片33环绕分布于拨片安装座32上,拨片33之间的圆心连线呈三角形,驱动源34为电机或舵机, 拨片33上均设有两个轴向分布且错位设置的上齿331与下齿332,驱动源34带动拨片33转动,驱使上齿331或下齿332与底托落料腔311内的打包底座a2逐个相抵,上齿331与下齿332之间圆周方向呈90
°
排布,且轴向齿距均小于打包底座a2到打包环台a3的距离,底托储存盒31一侧开设有与底托落料腔311相导通的加料槽312,拨片33均通过共用一个驱动源34驱动,拨片33之间存
有联动机构,联动机构包括设置拨片33上的螺纹轴35,螺纹轴35之间通过连接绳36连接并同步转动,拨片33均设置在拨片安装座32的下端,螺纹轴35设置在拨片安装座32的上端,且穿过拨片安装座32后与拨片33固定连接,驱动源34设置在拨片安装座32上端并驱动其中一个螺纹轴35转动,蛋糕夹持爪51之间形成用于夹持打包环台a3的底托夹持腔511,蛋糕夹持爪51的侧边与打包底座a2相抵,蛋糕夹持爪51上设置控制蛋糕夹持爪51张合进而扩大或缩小底托夹持腔511的夹持开合电机54,第一机械臂5对应底托夹持腔511的一端设有用于插入蛋糕胚b内的蛋糕叉55。
50.如图12-图16所示,工作台1对应第一机械臂5的一端设有果粒给料装置9,果粒给料装置9包括设置在工作台1上的若干个果粒给料机,果粒给料机包括果粒室91、设置在果粒室91下方并其相导通的定量盒92以及设置在定量盒92下方并与定量盒92导通的果粒出料导套93,定量盒92一端设有将定量盒92与果粒室91隔断上隔板94,另一端设有将定量盒92与果粒出料导套93隔断的下隔板95,定量盒92侧边设有置于上隔板94与下隔板95之间的驱动盒96,驱动盒96内设有驱动上隔板94与下隔板95交错开闭的隔板驱动机构,隔板驱动机构有且只有一个定量驱动源97驱动其工作,联动开闭机构包括设置在驱动盒96内的定量驱动源97以及与定量驱动源97输出端连接的摇杆971,定量驱动源97带动摇杆971沿输出端为支点来回往复摆动,上隔板94与下隔板95上均开设有与摇杆971其中一段活动路径相符的让位弧形槽941,上隔板94与下隔板95上的让位弧形槽941镜像设置,摇杆971轴向两端分别设有处于同一轴心线上的驱动件972,驱动件972均穿设于上隔板94与下隔板95的让位弧形槽941内,当定量驱动源97驱动摇杆971往一个方向摆动时,摇杆971一端的驱动件972将带动上隔板94或下隔板95打开或关闭定量盒92,而另一端的驱动件972将沿让位弧形槽941摆动,定量驱动源97为双输出轴电机或双输出轴舵机,定量驱动源97的两个输送轴均安装有摇杆971,驱动件972分别设置在两个摇杆971上,并插入到对应的让位弧形槽941内,两个摇杆971之间连接有同步支撑臂973,上隔板94与下隔板95朝向定量盒92的一端设有相互重合的初始定位槽942,初始定位槽942与上隔板94、下隔板95上的让位弧形槽941相导通,上隔板94和或下隔板95朝向定量盒92的一端设有果粒切口943,工作台1对应果粒出料导套93的出口处设有果粒落料盘98。
51.本发明的蛋糕机器人在工作中,工人只需给备用罐放置架62内的奶油罐7内补充奶油、给蛋糕底托自动给料装置3内补充蛋糕底托a、给蛋糕胚给料装置4补充蛋糕胚b、给果粒给料装置9补充果粒就可以正常使用,且工作台内的所以装置均优选在恒温低温室内进行加工,蛋糕胚给料装置4会提供不同尺寸的蛋糕胚,当蛋糕机器人的系统接收到需求订单后,会根据订单内蛋糕的种类进行如下步骤加工:1、检查蛋糕底托自动给料装置3、蛋糕胚给料装置4、备用罐放置架62、果粒给料装置9内消耗品是否存量正常;2、确认正常后,第一机械臂5会进入蛋糕底托自动给料装置3的底托落料腔311下方,蛋糕夹持爪51张合后形成供蛋糕底板a1大小适配的底托夹持腔511,驱动源34会按0
°
、90
°
、0
°
来回转动,带动螺纹轴35和拨片33同步转动,通过并通过连接绳36带动其余两个拨片33同步同向转动,当驱动源34从0
°
转到90
°
时,蛋糕底托a从拨片33的上齿331下落至下齿332;驱动源34从90
°
转到0
°
时,蛋糕底托a从下齿332掉落至底托夹持腔511上,再被蛋糕夹持爪51夹持打包环台a3,然后第一机械臂5将翻转蛋糕底托a后,将打包底座a2放置到蛋糕
工作转台2上。
52.3、蛋糕胚给料装置4会将对应尺寸的蛋糕胚b送至工作台1上,第一机械臂5驱动蛋糕叉55插入蛋糕胚b内侧边,并配合蛋糕夹持爪51夹住蛋糕胚b,并将蛋糕胚b转运到蛋糕工作转台2上。
53.4、第一机械臂5将蛋糕夹持爪51一侧的果粒送料盒53放置到对应的果粒出料导套93出口处,定量驱动源97带动摇杆971逆时针转动120
°
,带动上隔板94回拨,使果粒室91和定量盒92联通,果粒落入定量盒92;驱动源97带动摇杆971顺时针转至原点,上隔板94回位,阻断果粒室91和定量盒92,然后定量驱动源97带动摇杆971顺时针转动120
°
,带动下隔板95回拨,使果粒出料导套93和定量盒3联通,果粒从果粒出料导套93出口滑出进入下方的果粒送料盒53;定量驱动源97带动摇杆971顺时针转至原点,下隔板95回位,阻断定量盒92和果粒出料导套93,蛋糕工作转台2带动蛋糕胚b周向转动,第一机械臂5会将果粒送料盒53内的果粒均匀的倒入到蛋糕胚b上,多种水果就多次操作。
54.5、备用罐放置架62内会放置填充不同种类颜色奶油的奶油罐7,第二机械臂6会根据系统选中去备用罐放置架62装载对应的奶油罐7,在装载时,承托夹板64通过滑台滑块结构架设于承托导向板611上,使承托夹板64在滑移过程中始终沿承托导向板611滑移,固定驱动源63会带动主动旋臂631中心点转动,主动旋臂631转动时,两侧的左从动臂632、右从动臂633会相互远离,使两侧夹持板641设置于奶油罐7侧壁两侧,且承托板642会插入奶油罐7底部,主动旋臂631反向转动进而将奶油罐7固定后从备用罐放置架62上取下,然后奶油罐7根据蛋糕的不同会装载不同的工具头71,此时工具盘81上的工具槽83内装载有6个规格不一的工具头71,当系统确定蛋糕款式后,判断整个工具盘81的原点,使其开机找回原点,精准的将对应的工具头71送至定位更换口处,工具传感器会检测定位更换口内夹爪84上是否具有工具头71判定通过后,第二机械臂6驱动承托夹板64稍微打开,并下移将奶油罐7底部的装配管72插入到装配槽711内,同时承托夹板64会合拢承托板642上的u型卡板643卡住止挡环座715的下沿,第二机械臂2带动工具头71将其克服弹簧的弹性力后从工具槽83内拉出,工具传感器会检测夹爪84内的工具头71是否正确取出,正确取出后,第二机械臂2驱动奶油罐7按预设程序对蛋糕胚b正面挤压奶油,第一机械臂5驱动奶油刮板52将蛋糕胚b正面的奶油刮平,然后第二机械臂2对蛋糕胚b侧面挤压奶油,第一机械臂5驱动奶油刮板52将蛋糕胚b侧面的奶油刮平,奶油用尽后还可自动去备用罐放置架62更换填充好的奶油罐7。
55.6、第二机械臂6奶油涂抹完成后,后进行裱花或淋面处理,需更换新工具时,会将原先空缺的工具槽83转动到定位更换口处,始终设置于定位更换口处的工具传感器会再次检测定位更换口内夹爪84上是否具有工具头71,若是判定缺失,第二机械臂6会将当前的工具头71放入工具槽83内并判断是否正确取回,再转动工具盘81,并将需要的工具头71停留到定位更换口处再次更换,实现工具头的自动快速更换,更换完成后对蛋糕胚b进行裱花或淋面处理,完成蛋糕装饰。
56.7、工作台1带动蛋糕工作转台2将蛋糕送出恒温低温室的窗口处,供其后续打包处理。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1