一种自控做青的茶叶加工系统及其加工方法与流程
本发明属于茶叶加工,尤其涉及一种自控做青的茶叶加工系统及其加工方法。
背景技术:
1、茶叶的分类——按焙火程度来分类。成茶精制过程中的焙火是改变茶汤品质的重要步骤,正确的焙火可以有效提高茶汤品质。再加工茶以各种毛茶或精制茶再加工而成的称为再加茶,包括分为:花茶、紧压茶、萃取茶、果味茶、药用保健茶、含茶饮料等。茶叶加工又称“制茶”,是将茶树鲜叶经过各道加工工序,制成各种半成品茶或成品茶的过程。按加工过程不同,可分为初制(初加工)、精制(精加工)、再加工和深加工。加工工艺不同便形成不同的茶类,各茶类茶叶品质的形成取决于加工工序的协调配合;优质的鲜叶原料只有在优良的加工条件下,生产出优质的各种茶叶;然而,现有自控做青的茶叶加工系统采集的茶叶图像不清晰;同时,对茶叶颜色及形状识别不准确。
2、通过上述分析,现有技术存在的问题及缺陷为:
3、(1)现有自控做青的茶叶加工系统采集的茶叶图像不清晰。
4、(2)对茶叶颜色及形状识别不准确。
5、(3)不能对茶叶加工异常事件进行监控。
技术实现思路
1、针对现有技术存在的问题,本发明提供了一种自控做青的茶叶加工系统及其加工方法。
2、本发明是这样实现的,一种自控做青的茶叶加工系统包括:
3、茶叶加工监控模块、主控模块、茶叶图像采集模块、茶叶图像增强模块、茶叶识别模块、茶叶筛选模块、茶叶烘焙模块、显示模块;
4、茶叶加工监控模块,与主控模块连接,用于对茶叶加工过程进行视频监控;
5、所述茶叶加工监控模块监控方法:
6、采集多个摄像头的茶叶加工监控视频图像帧,根据选取的当前帧茶叶加工监控视频图像的当前区域确定参考帧茶叶加工监控视频图像中对应位置的参考区域,其中所述参考帧茶叶加工监控视频图像包括所述当前帧茶叶加工监控视频图像;
7、确定所述当前区域与所述参考区域的欧几里德距离;根据所述欧几里德距离确定所述参考区域相对于所述当前区域的权重值;根据所述权重值及所述当前区域的像素值确定所述当前区域去噪后的像素值;
8、根据所述茶叶加工监控视频图像帧提取运动前景;获取所述运动前景在所述茶叶加工监控视频图像帧中的像素坐标;根据所述像素坐标、多个摄像头的焦距和空间距离计算所述运动前景的三维空间坐标;
9、根据所述三维空间坐标触发所述运动前景的异常事件,根据触发的事件发出相应的警报;
10、主控模块,与茶叶加工监控模块、茶叶图像采集模块、茶叶图像增强模块、茶叶识别模块、茶叶筛选模块、茶叶烘焙模块、显示模块连接,用于控制各个模块正常工作;
11、茶叶图像采集模块,与主控模块连接,用于采集茶叶图像;
12、茶叶图像增强模块,与主控模块连接,用于对茶叶图像进行增强处理;
13、茶叶识别模块,与主控模块连接,用于对茶叶颜色及形状进行识别;
14、茶叶筛选模块,与主控模块连接,用于根据识别结果对茶叶进行筛选;
15、茶叶烘焙模块,与主控模块连接,用于对茶叶进行烘焙;
16、显示模块,与主控模块连接,用于显示茶叶图像、识别结果。
17、一种自控做青的茶叶加工方法包括以下步骤:
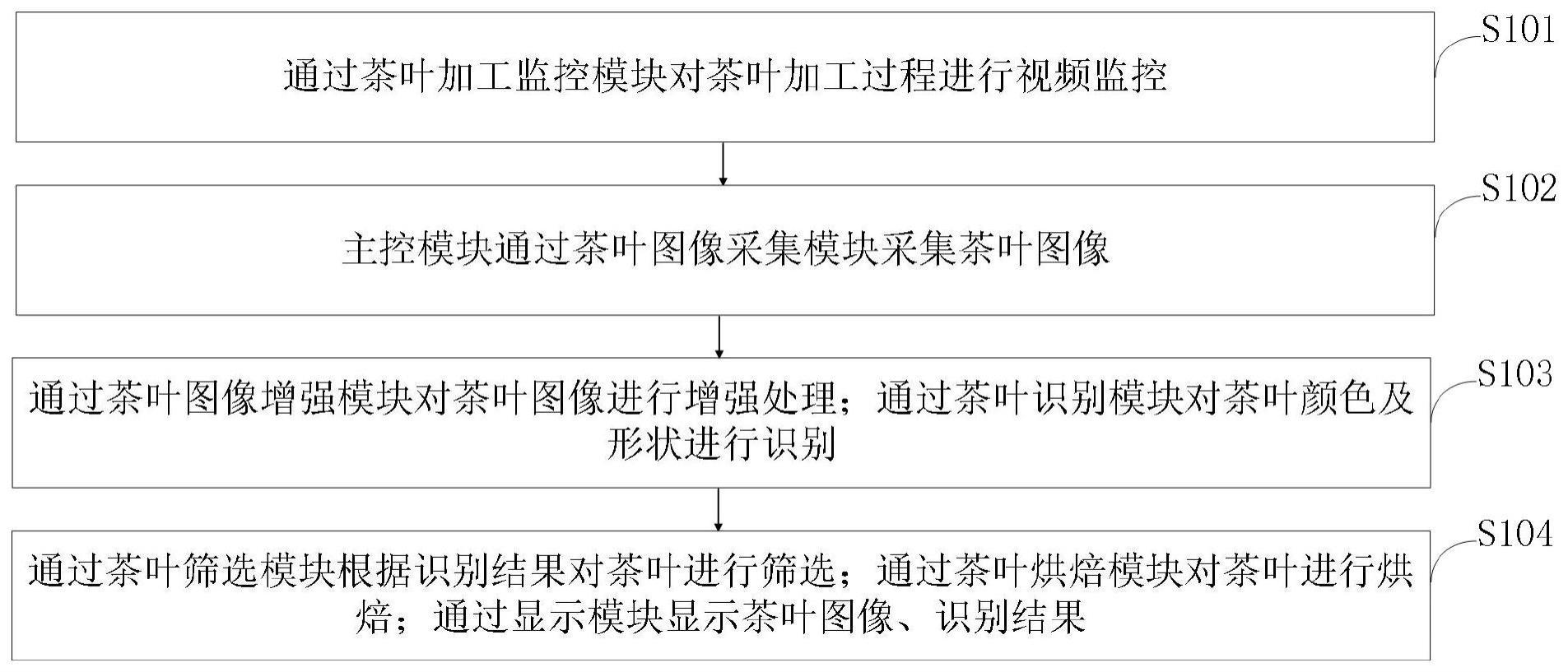
18、步骤一,通过茶叶加工监控模块对茶叶加工过程进行视频监控;
19、步骤二,主控模块通过茶叶图像采集模块采集茶叶图像;
20、步骤三,通过茶叶图像增强模块对茶叶图像进行增强处理;通过茶叶识别模块对茶叶颜色及形状进行识别;
21、步骤四,通过茶叶筛选模块根据识别结果对茶叶进行筛选;通过茶叶烘焙模块对茶叶进行烘焙;通过显示模块显示茶叶图像、识别结果。
22、进一步,所述茶叶图像增强模块增强方法如下:
23、(1)配置摄像器参数,通过摄像器采集茶叶图像;在获取茶叶图像后,根据预设的灰尘标记位置确定茶叶图像需要增强的位置;统计茶叶图像的直方图,以确定茶叶图像需要增强的位置上的像素值在整个茶叶图像的像素值分布比例;
24、(2)根据茶叶图像需要增强的位置上的像素值在整个茶叶图像的像素值的分布比例,对茶叶图像需要增强的位置上的像素值进行处理;输出处理后的茶叶图像;
25、所述根据茶叶图像需要增强的位置上的像素值在整个茶叶图像的像素值的分布比例,对茶叶图像需要增强的位置上的像素值进行处理的步骤具体包括:
26、判断茶叶图像需要增强的位置上的像素值在整个茶叶图像的像素值的分布比例是否小于预设的分布阈值;
27、在茶叶图像需要增强的位置上的像素值在整个茶叶图像的像素值的分布比例小于预设的分布阈值时,对茶叶图像需要增强的位置上的所有像素值重新赋值;
28、在茶叶图像需要增强的位置上的像素值在整个茶叶图像的像素值的分布比例大于或等于预设的分布阈值时,对茶叶图像需要增强的位置上的部分像素值重新赋值。
29、进一步,所述在所述根据预设的灰尘标记位置确定茶叶图像需要增强的位置的步骤之前,包括下述步骤:
30、获取茶叶图像内容为白色物体的茶叶图像;
31、将茶叶图像中像素值小于预设的像素值阈值的位置标记为预设的灰尘标记位置。
32、进一步,所述在茶叶图像需要增强的位置上的像素值在整个茶叶图像的像素值的分布比例小于预设的分布阈值时,对茶叶图像需要增强的位置上的所有像素值重新赋值的步骤具体包括:
33、将小于第一预设像素值的茶叶图像需要增强的位置上的像素值重新赋值为0;
34、将大于第二预设像素值的茶叶图像需要增强的位置上的像素值重新赋值为255。
35、进一步,所述茶叶识别模块识别方法如下:
36、1)通过摄像器直接得到目标茶叶影像,摄像器静态影像直接输入计算机,摄像器的动态影像利用计算机影像采集卡对影像进行采集和储存后输入计算机;将获取的影像进行中值滤波去噪和直方图均衡的预处理;提取目标茶叶颜色特征参数:经过预处理后的影像,将影像的rgb信息转换为hsi信息,hsi信息通过直方图,提取颜色特征参数;
37、2)经过预处理后的影像,通过对目标茶叶影像的二值化处理,得到目标茶叶的形状和轮廓图,提取出目标茶叶周长、面积、中轴长度、平均宽度和弯曲度系数特征参数;对目标茶叶自动识别:将基于hsi模型提取的目标茶叶颜色特征参数和二值化后影像提取的目标茶叶形状特征参数,通过网络系统,对目标茶叶进行最后的自动识别;
38、3)在提取目标茶叶颜色特征参数时,选用hsi颜色模型,直接对反映颜色区别的色度、饱和度影像进行分析和处理;在所述目标茶叶自动识别的过程中,采用将遗传算法和神经网络相结合的遗传神经网络算法,利用遗传算法对神经网络进行训练,完成自动识别目标茶叶品质的过程。
39、进一步,所述动态影像采用ccd彩色摄像机拍摄,清晰度为540线。
40、进一步,所述数码相机采用微距模式,并且像素为800万,关闭闪光灯拍摄静态影像。
41、进一步,所述获取影像过程中,目标茶叶放于光照室内,光照室内壁全部涂成白色,以形成均匀的漫反射。
42、进一步,所述在进行所述目标茶叶颜色特征参数提取的取像中,目标茶叶均匀铺满视窗;
43、在进行所述目标茶叶形状特征参数提取的取像中,目标茶叶零星分布,不重叠。
44、结合上述的技术方案和解决的技术问题,请从以下几方面分析本发明所要保护的技术方案所具备的优点及积极效果为:
45、第一、针对上述现有技术存在的技术问题以及解决该问题的难度,紧密结合本发明的所要保护的技术方案以及研发过程中结果和数据等,详细、深刻地分析本发明技术方案如何解决的技术问题,解决问题之后带来的一些具备创造性的技术效果。具体描述如下:
46、本发明通过茶叶图像增强模块由于根据预设的灰尘标记位置对获取的茶叶图像相应位置的像素值进行处理,因此使被灰尘遮挡的位置更清晰,从而使输出的茶叶图像也更清晰;同时,通过茶叶识别模块利用计算机视觉和影像处理技术,增加目标茶叶的形状参数,在对目标茶叶颜色提取特征参数时选用hsi颜色模型,将亮度、色调和饱和度分开,直接对反映颜色区别的色度、饱和度影像进行分析、处理,大大缩短彩色影像的处理时间;通过改进神经网络算法,实现了目标茶叶品质识别的自动化,使得计算机检测结果与人工检测结果高度吻合。
47、本发明通过茶叶加工监控模块监控方法不仅可根据运动前景在二维平面上的位置触发异常事件,还可根据换算得到的运动前景的三维空间坐标中得深度信息触发异常事件,使得异常事件的触发更加准确,从而提高了茶叶加工安全性。
48、第二,把技术方案看做一个整体或者从产品的角度,本发明所要保护的技术方案具备的技术效果和优点,具体描述如下:
49、本发明通过茶叶图像增强模块由于根据预设的灰尘标记位置对获取的茶叶图像相应位置的像素值进行处理,因此使被灰尘遮挡的位置更清晰,从而使输出的茶叶图像也更清晰;同时,通过茶叶识别模块利用计算机视觉和影像处理技术,增加目标茶叶的形状参数,在对目标茶叶颜色提取特征参数时选用hsi颜色模型,将亮度、色调和饱和度分开,直接对反映颜色区别的色度、饱和度影像进行分析、处理,大大缩短彩色影像的处理时间;通过改进神经网络算法,实现了目标茶叶品质识别的自动化,使得计算机检测结果与人工检测结果高度吻合。
- 还没有人留言评论。精彩留言会获得点赞!