一种海带打结装置及打结方法
本发明属于海带加工设备,具体涉及一种海带打结装置,还涉及一种海带打结方法。
背景技术:
1、海带多产于沿海地区,它作为一种美食备受人们喜爱。在国内外都具有极大的市场。海带食用时会选择将其打结再烹饪,而目前海带打结部分采用人工手工打结,打结效率低、用工成本高,同时对工人皮肤有一定腐蚀伤害,甚至会导致手指变形以及指甲脱落。
2、公告号为 cn 110558504 b的中国专利公开了一种人工仿形式海带打结机,包括机架,还包括设置在机架上的打结机构,缠绕机构和切断机构,其中,打结机构中,滑环设置在机架上,转动架的中部旋转设置在滑环上,锥形夹通过往复移动组件设置在滑环上;缠绕机构中,摆动电机设置在转动架上,电动爪手a与摆动电机连接,电动爪手a小于锥形夹的最大开合空隙;切断机构中,切块通过往复移动组件设置在机架上,电动爪手b设置在切块上,电动切刀设置在切块上。
3、公告号为 cn 116138470 b的中国专利公开了一种海带打结装置及其打结方法,通过设计特定结构及位置关系的第一夹持机构、第二夹持机构和活动打结夹持机构,特别是活动打结夹持机构中的二个滑块和二个夹臂的机构设计,利用二个滑块和二个夹臂的枢接关系,以及二个夹臂之间相互枢接的关系,以及二个夹臂的特殊l形结构,使其在打结过程中具有独特的打结方法,即先钩住海带回拉,旋转使海带绕附,再通过夹持端夹持海带端部,再翻转,延x向移动使绕附的海带松脱形成海带结,通过二个夹持臂夹持海带端部和向x向移动的过程可使海带打结处充分拉紧,使打结处更细小,后期京饪不易松脱,且以上结构在打结时具有很高的成功率。
4、以上技术方案都实现了海带打结自动化,解放人工,但是存在机械打结设备体型庞大、打结动作复杂的问题。研发设计一款代替人工打结、降低打结复杂度以及提高打结成功率、效率的海带打结设备是未来海带农产品加工的发展趋势。
技术实现思路
1、本发明目的是,提供一种海带打结装置及打结方法,解决现有技术中常见的海带打结设备体积庞大、打结动作复杂以及成功率不高的问题。
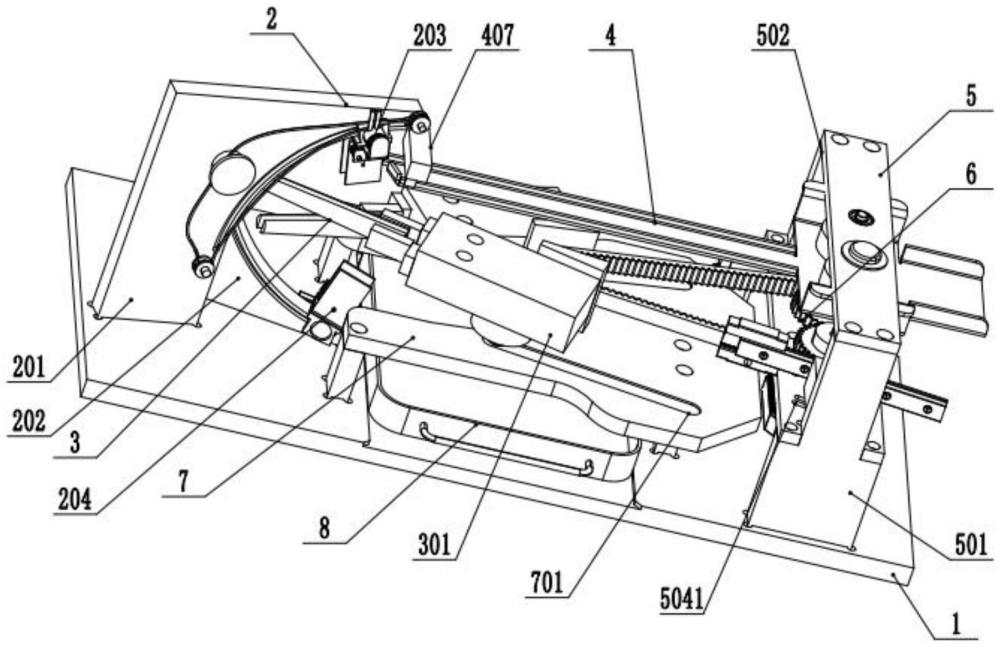
2、本发明采用的技术方案是,一种海带打结装置,包括:
3、主体底板;
4、辅助打结模块,安装在主体底板右端,用于夹持海带条两端并旋转形成交叉的环形;
5、气动夹爪模块,安装在主体底板左端,用于夹持环形海带条的两端并移动使海带条端部从环形海带条中间穿过缠绕打结;
6、送料模块,安装在气动夹爪模块上方,将海带条从主体底板左端输送至右端正对辅助打结模块。
7、优选地,上述辅助打结模块包括第一辅助立板、第二辅助立板、第一夹持机构和第二夹持机构,第一辅助立板上部设有弧形的第一缺口,第一缺口上设有第一导轨,第一导轨上滑动连接匹配的第一滑块,第一滑块上固定安装第一夹持机构,第二辅助立板下部设有弧形的第二缺口,第二缺口上设有第二导轨,第二导轨上滑动连接匹配的第二滑块,第二滑块上固定安装第二夹持机构,第一导轨与第二导轨空间呈交叉状态,第一导轨下部左端与第二导轨顶部左端正对;第一辅助立板上安装有第一驱动器,第一夹持机构安装在第一滑块上并与第一驱动器相连,第二辅助立板上安装有第二驱动器,第二夹持机构安装在第二滑块上并与第二驱动器相连,第一夹持机构位于第一导轨下部左端、第二夹持机构位于第二导轨顶部左端时,第一夹持机构和第二夹持机构的开口正对送料模块的出料口。
8、优选地,上述第一驱动器包括第一主动驱动轮、第一首部定向轮、第一尾部定向轮和第一驱动绳,第一驱动主动轮安装在第一辅助立板外侧中部并与第一驱动电机的输出轴连接,第一驱动电机安装在第一辅助立板内侧,第一首部定向轮和第一尾部定向轮分别转动连接于第一首部安装轴和第一尾部安装轴,第一首部安装轴和第一尾部安装轴分别固定安装在第一辅助立板的外侧,位于第一导轨首尾两端,第一驱动绳中部固定连接第一主动驱动轮,第一驱动绳两端分别绕过第一首部定向轮和第一尾部定向轮后连接第一夹持机构的两侧,第一夹持机构受第一驱动主动轮驱动沿第一导轨移动;第二驱动器与第一驱动器结构相同,安装在第二辅助立板上。
9、优选地,上述气动夹爪模块包括第一气动夹爪和第二气动夹爪,第一气动夹爪左端通过第一连接机构与驱动机构相连,第一连接机构包括第一齿条,第一齿条右端通过第一连接块与第一气动夹爪固定连接,左端背面通过第一滑动块与第一直线导轨连接,正面与驱动机构输出端连接,第二气动夹爪的结构与第一气动夹爪相同,第一气动夹爪与第二气动夹爪的右端呈交叉状态且第一气动夹爪位于第二气动夹爪下方,第一气动夹爪的夹持端正对第二夹持机构,第二气动夹爪的夹持端正对第一夹持机构。
10、优选地,上述驱动机构包括步进电机、主动齿轮和从动齿轮,步进电机安装在电机固定板下方,电机固定板两端分别固定连接第一立板和第二立板,第一立板和第二立板垂直立设于主体底板上,步进电机输出轴向上贯穿电机固定板后连接主动齿轮,从动齿轮安装在主动齿轮一侧与主动齿轮相互啮合,主动齿轮和从动齿轮分别连接气动夹爪模块。
11、优选地,上述送料模块包括主动摩擦轮、从动摩擦轮和海带输送板,所述主动摩擦轮和从动摩擦轮并排设置在摩擦轮安装板下方且二者之间存在容纳海带条通过的间隙,摩擦轮安装板两端分别固定连接第一立板和第二立板顶端,主动摩擦轮内圈与摩擦轮单向轴模组固定连接,摩擦轮单向轴模组底端通过法兰轴承与电机固定板转动连接,顶端通过法兰轴承与摩擦轮安装板转动连接且顶端安装有旋转编码器,从动摩擦轮内圈与摩擦轮固定短轴固定连接,摩擦轮固定短轴顶端通过法兰轴承与摩擦轮安装板转动连接,海带输送板头端位于主动摩擦轮和从动摩擦轮下方且向左延伸设有进料口,海带输送板上对应主动摩擦轮和从动摩擦开设圆孔,海带输送板两侧向外设有托板与摩擦轮安装板固定连接;海带输送板末端伸向辅助打结模块并设有出料口,出料口处安装有海带剪切机构。
12、一种海带打结装置的打结方法,包括以下步骤:
13、第一步,初始时,第一夹持机构位于第一导轨下部左端,第二夹持机构位于第二导轨顶部左端,第一夹持机构和第二夹持机构均保持张开状态,操作步进电机正转,将海带条放入主动摩擦轮和从动摩擦轮之间的缝隙中,海带条依靠主动摩擦轮和从动摩擦轮的推力沿海带输送板向右移动,直至推到海带条头端掉落到第二夹持机构的夹持端被夹持,此时,海带条移动了旋转编码器设置的设定距离,海带条末端位于第一夹持机构的夹持段被夹持,海输送板末端的海带剪切机构将海带条切断;
14、第二步,夹住海带条两端后,第一驱动电机作为动力源带动第一驱动绳在第一首部定向轮、第一尾部定向轮限制的范围内拉动第一夹持机构沿着第一导轨运动,使海带条头端向上移动;同理,第二驱动电机作为动力源带动第二绳驱动在第二首部定向轮、第二尾部定向轮限制的范围内拉动第二夹持机构沿第二导轨运动,将海带条末端向下移动,由于第一导轨、第二导轨空间呈交叉状且为弧形,海带条被扭转呈圈且海带条末端位于头端的后方下部;
15、与此同时,步进电机反转,第一齿条和第二齿条分别带动第一滑块和第二滑块向右移动,从而带动第一气动夹爪和第二气动夹爪右移,二者安装高度不同;第二步结束时,第一气动夹爪和第二气动夹爪形成交叉状,第一气动夹爪在下方,第二气动夹爪在上方,海带条头端刚好被移动到第二气动夹爪的夹持端,海带条末端端刚好被移动到第一气动夹爪的夹持端;
16、第三步,第一气动夹爪的夹持端闭合夹持海带条末端,第二气动夹爪的夹持端闭合夹持海带条头端,夹住后,第一夹持机构和第二夹持机构松开对海带条的夹持,随后,在第一驱动电机和第二驱动电机的驱动下,第一夹持机构回到第一导轨下部左端,第二夹持架构回到第二导轨顶部左端;然后步进电机正转,第一齿条和第二齿条分别带动第一气动夹爪和第二气动夹爪向左移动,其中第一气动夹爪夹持海带条末端穿过海带条圈向左移动,随着第一气动夹爪和第二气动夹爪之间的距离拉开,海带条两端向外拉扯完成打结;
17、第四步,海带打结完成后,第一气动夹爪的夹持端打开,第二气动夹爪的夹持端打开,打结完成的海带将掉落收集,进行后续包装工作;
18、在第三步过程中,第二根海带条可依照第一步进入主动摩擦轮、从动摩擦轮的缝隙中,为第二根海带打结做准备,从而形成完整的循环节拍,打结海带;在步进电机反转时,由于采用摩擦轮单向轴模组,主动摩擦轮不转动,步进电机正转时开始送料。
19、相较现有技术,本发明的有益效果是,打结机集海带打结气动夹爪模块、海带打结辅助模块以及主体框架为一体,各个模块相互配合实现高效打结,解决现有技术中常见的海带打结设备体积庞大、打结动作复杂以及成功率不高的问题。该海带打结装置各个机构设计紧凑、体积小巧,连接紧密,具有较好的使用效果,其中,海带打结机通过齿轮齿条以及摩擦轮的相互配合,摩擦轮完成海带条进料工序,海带条呈直条状,有利于辅助打结机构快速夹持运动,辅助打结机构通过第一夹持结构和第二夹持机构稳定夹持海带上下移动快速成圈,配合第一气动夹爪和第二气动夹爪抓取海带条两端从海带圈中穿过形成海带结,动作更简单,夹爪夹取速度快且稳定,提高海带打结效率和质量。
- 还没有人留言评论。精彩留言会获得点赞!