碳纤维伞骨装配装置及其装配方法与流程
1.本发明涉及伞具生产技术领域,具体为碳纤维伞骨装配装置及其装配方法。
背景技术:
2.伞骨是支撑雨伞的一条一条的骨架,以前的伞骨大多为木质、竹制伞骨,后来出现有铁骨,钢骨,铝合金骨,电着骨以及树脂骨,而形式大多用收缩骨,携带轻巧方便,在进行低重量高强度的高级伞具的生产过程中,常常使用碳纤维作为伞骨原材料,碳纤维是含碳量在90%以上的高强度高模量纤维。耐高温居所有化纤之首。用腈纶和粘胶纤维做原料,经高温氧化碳化而成。是制造航天航空等高技术器材的优良材料。
3.专利公开号为cn113397283a的中国发明专利,公开了一种用于伞骨自动装配的装置和伞骨装配方法,其用于伞骨自动装配的装置实现了伞骨的全自动化的装配,不仅显著提高了伞骨的装配速度,而且提高了伞骨装配的成功率;可以迅速的排查出问题;根据伞骨的形状选择合适的工作台,并对各机构的位置进行调整即可使得本产品适用于不同形状的伞骨的自动装配。
4.但是上述专利中还存在以下问题:1.设备采用的装配定位手段较为繁琐,使用的工位较多,装配过程随比较与传统手工铆钉效率有所提高但还具备提升空间;2.设备在针对不同的伞骨形状进行装配位置调整的过程较为麻烦,从而会一定程度上影响装配效率。
技术实现要素:
5.本发明的目的在于提供碳纤维伞骨装配装置及其装配方法,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:碳纤维伞骨装配装置,包括受力杆运输带、推杆运输带、支撑杆运输带和出料运输带,所述受力杆运输带、推杆运输带、支撑杆运输带和出料运输带之间安装有拼装铆接机构,所述拼装铆接机构包括固定拼装台,固定拼装台正面滑动连接有第一滑动拼装台,第一滑动拼装台侧面滑动连接有第二滑动拼装台,所述固定拼装台正面和第一滑动拼装台侧面均开设有滑槽,所述滑槽的侧壁之间均转动连接有丝杠,固定拼装台侧面以及第一滑动拼装台正面均安装头与各自丝杠固定连接的旋钮,丝杠外壁均螺纹连接有丝套,位于固定拼装台的丝套与第一滑动拼装台固定连接,位于第一滑动拼装台的丝套与第二滑动拼装台固定连接,所述固定拼装台、第一滑动拼装台和第二滑动拼装台顶部均安装有取拿拼接机构,第一滑动拼装台侧面安装有第一机械臂,第一机械臂活动端安装有铆钉枪,固定拼装台背面安装有第二机械臂,第二机械臂活动端安装有夹持爪。
7.更进一步地,取拿拼接机构包括包括侧边固定架,侧边固定架顶部转动连接有驱动电机驱动的驱动丝杠,驱动丝杠外壁螺纹连接有定位丝套板,定位丝套板底部两侧分别安装有气缸,气缸的输出端安装有机械爪。
8.更进一步地,所述受力杆运输带承接与安装在固定拼装台的取拿拼接机构,推杆
运输带承接与安装在第二滑动拼装台的取拿拼接机构,支撑杆运输带承接于安装在第一滑动拼装台的取拿拼接机构。
9.更进一步地,所述第一滑动拼装台的两侧位置分别设置有支撑柱,所述固定拼装台底部固定连接有支撑架,两支撑柱之间以及靠近第二滑动拼装台的支撑柱与支撑架之间固定连接有分别贯穿于第一滑动拼装台和第二滑动拼装台的两限位杆。
10.更进一步地,其一所述支撑柱的正面安装有控制器,所述拼装铆接机构、取拿拼接机构、受力杆运输带、推杆运输带、支撑杆运输带和出料运输带分别与控制器电性连接。
11.更进一步地,所述出料运输带安装与拼装铆接机构背面,所述出料运输带承接与第二机械臂的夹持爪。
12.更进一步地,所述第一滑动拼装台相对于固定拼装台的位置以及第一滑动拼装台和第二滑动拼装台相对位置能够通过旋钮和丝杠进行调整。
13.碳纤维伞骨装配方法,所述的碳纤维伞骨装配装置,其装配方法分为以下步骤:步骤一;将伞骨的受力杆、支撑杆和推杆等距的分别放置在受力杆运输带、支撑杆运输带和推杆运输带上;步骤二:安装在固定拼装台上的取拿拼接机构将运输在受力杆运输带上的受力杆定点取拿,并放置在固定拼装台上进行固定;步骤三:安装在第一滑动拼装台上的取拿拼接机构将运输在支撑杆运输带上的支撑杆定点取拿,并放置在第一滑动拼装台上,实现受力杆与支撑杆铆接位置的适配后进行固定;步骤四:通过安装在第一滑动拼装台侧面的第一机械臂利用铆钉枪对受力杆和支撑杆铆接位置进行铆钉固定;步骤五:安装在第二滑动拼装台上的取拿拼接机构将运输在推杆运输带上的推杆定点取拿,并放置在第二滑动拼装台上,实现推杆与支撑杆铆接位置的适配后进行固定;步骤六:再次利用第一机械臂驱动铆钉枪对推杆和支撑杆铆接位置进行铆钉固定完成伞骨的拼接;步骤七:送松脱开固定在受力杆、支撑杆和推杆上的取拿拼接机构,利用安装在固定拼装台背面的第二机械臂驱动的夹持爪,将伞骨转移到出料运输带。
14.更进一步地,所述步骤一中放置在受力杆运输带、支撑杆运输带和推杆运输带上的受力杆、支撑杆和推杆的运输间隔为5-8秒。
15.更进一步地,所述步骤二、步骤三和步骤五对受力杆、支撑杆和推杆的取拿时间控制在1-1.5秒,所述步骤四和步骤六的铆钉固定时间控制在1-2秒。
16.与现有技术相比,本发明的有益效果是:该碳纤维伞骨装配装置及其装配方法,通过分别安装在固定拼装台、第一滑动拼装台和第二滑动拼装台上的取拿拼接机构,能够依次的对受力杆、支撑杆和推杆进行取拿并利用固定拼装台、第一滑动拼装台和第二滑动拼装台的限位,使得三者的需要铆钉的位置进行配合,并利用第一机械臂控制的铆钉枪对其进行快速铆钉,以此来实现对伞骨的快速拼装,拼装设备集中且设置的工位较少装配定位快速,从而能够显著的提高装配的效率。
17.该碳纤维伞骨装配装置及其装配方法,通过固定拼装台、第一滑动拼装台和第二滑动拼装台三者的相对滑动设计,能够利用旋钮和丝杠进行第一滑动拼装台和第二滑动拼
装台的相对位置的调整,从而能够适应不同装配位置伞骨的拼装铆钉。
附图说明
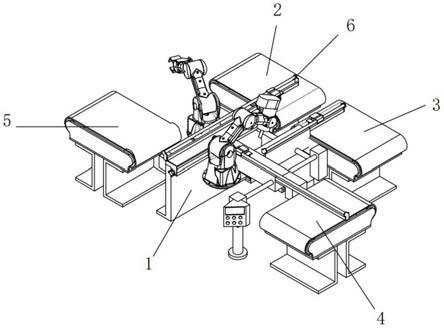
18.图1为本发明的正面结构示意图;图2为本发明的背面结构示意图;图3为本发明的结构示意图;图4为本发明的取拿拼接机构结构示意图;图5为使用本发明装配完成的伞骨结构示意图。
19.图中:1、拼装铆接机构;101、固定拼装台;102、支撑架;103、第一滑动拼装台;104、丝杠;105、旋钮;106、第二滑动拼装台;107、支撑柱;108、限位杆;109、控制器;110、第一机械臂;111、铆钉枪;112、第二机械臂;113、夹持爪;2、受力杆运输带;3、推杆运输带;4、支撑杆运输带;5、出料运输带;6、取拿拼接机构;601、侧边固定架;602、驱动电机;603、驱动丝杠;604、定位丝套板;605、气缸;606、机械爪。
具体实施方式
20.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
21.需要说明的是,在本发明的描述中,术语“上”、“下”、“前”、“后”、“左”、“右”、“竖直”、“水平”、“顶”、“底”、“内”、“外”等指示的方位或位置关系为基于附图所示的方位或位置关系,仅是为了便于描述本发明和简化描述,并不是指示或暗示所指的装置或元件所必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。
22.此外,应当理解,为了便于描述,附图中所示出的各个部件的尺寸并不按照实际的比例关系绘制,例如某些层的厚度或宽度可以相对于其他层有所夸大。
23.应注意的是,相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义或说明,则在随后的附图的说明中将不需要再对其进行进一步的具体讨论和描述。
实施例
24.本设备针对制造的伞骨主要分为三个部分,其一为与伞面相连接的受力杆,其二为转动固定在支撑杆底部的支撑杆,以及用于推动支撑杆转动的推杆,其中受力杆与伞顶相连接,支撑杆与伞顶下方的支撑块相连接,推杆与伞中的滑块相连接,如图5所示为设备主要针对的伞骨拼装形式,由于采用碳纤维的伞骨其强度较大,从而在生产的过程中不同于其他伞骨的多支撑设计,碳纤维伞骨结构较为简单同时强度也较大,本设备主要针对与不同装配尺寸的碳纤维伞骨进行装配,只针对单个伞骨的拼装不考虑整个雨伞的拼装,在雨伞的工业生产中伞骨的制造与装配与其他部位的装配处于不同的车间中。
25.如图1-5所示,本发明提供一种技术方案:碳纤维伞骨装配装置,包括受力杆运输带2、推杆运输带3、支撑杆运输带4和出料运输带5,受力杆运输带2、推杆运输带3、支撑杆运
输带4和出料运输带5之间安装有拼装铆接机构1,拼装铆接机构1包括固定拼装台101,固定拼装台101正面滑动连接有第一滑动拼装台103,第一滑动拼装台103侧面滑动连接有第二滑动拼装台106,固定拼装台101正面和第一滑动拼装台103侧面均开设有滑槽,滑槽的侧壁之间均转动连接有丝杠104,固定拼装台101侧面以及第一滑动拼装台103正面均安装头与各自丝杠104固定连接的旋钮105,丝杠104外壁均螺纹连接有丝套,位于固定拼装台101的丝套与第一滑动拼装台103固定连接,位于第一滑动拼装台103的丝套与第二滑动拼装台106固定连接,固定拼装台101、第一滑动拼装台和103第二滑动拼装台106顶部均安装有取拿拼接机构6,第一滑动拼装台103侧面安装有第一机械臂110,第一机械臂110活动端安装有铆钉枪111,固定拼装台101背面安装有第二机械臂112,第二机械臂112活动端安装有夹持爪113,出料运输带5安装与拼装铆接机构1背面,出料运输带5承接与第二机械臂112的夹持爪113。
26.需要注意的是,设备采用四工位的设计,从而实现了对伞骨零件的取拿铆钉和伞骨的输出,采用的固定拼装台101、第一滑动拼装台103和第二滑动拼装台106上的取拿拼接机构6,能够依次的对受力杆、支撑杆和推杆进行取拿并利用固定拼装台101、第一滑动拼装台103和第二滑动拼装台106的限位,首先固定拼装台101、第一滑动拼装台103和第二滑动拼装台106上设置的长度主要依据市面上常规尺寸的雨伞设计,能够满足各个部件的尺寸变化,其次能够利用取拿拼接机构6实现对其上台面的单自由度移动保证各个零部件在进行装配时不发生晃动,使得三者的需要铆钉的位置进行配合,并利用第一机械臂110控制的铆钉枪111对其进行快速铆钉,以此来实现对伞骨的快速拼装,拼装设备集中且设置的工位较少,装配定位快速,从而能够显著的提高装配生产的效率。
27.需要注意的是,使用设备时需要了解设备是如何实现对伞骨部件的定位以及设备运行中的要求,伞骨的拼装顺序是支撑杆首先铆钉在受力杆上,随后推杆铆接在支撑杆上,在对受力杆、支撑杆和推杆的拿取过程中,需要固定夹持在其固定位置安装设置的距离进行运输,从而能够保证受力杆每次放置固定在固定拼装台101上的位置是固定的,一般使用机械定位爪定位夹取和放置包装其在运输带上的放置位置基本相同,也可以在受力杆运输带2上设置固定长度的凹槽,利用人工进行放置,二者放置的效果基本相同,前者的安装盒维护成本较高,支撑杆和推杆的定位固定的方式与受力杆基本相同,为实现伞骨的精准装配需要较高的物料放置需求。
28.需要注意的是,为防止在铆钉的过程中由于铆钉枪111工作时产生的振动影响伞骨待铆钉处的配合,在进行实际的装配过程中,会先将受力杆和支撑杆先铆钉,在将推杆铆钉在支撑杆上由此避免铆钉过程中的振动影响,伞骨铆钉完毕后对各个零部件进行固定的取拿拼接机构6上的机械爪606会松开,从而使得整个装配体能够被方便的移动,利用第二机械臂112操作的夹持爪113能够方便的将整个装配完成后的伞骨运输出去。
29.取拿拼接机构6包括包括侧边固定架601,侧边固定架601顶部转动连接有驱动电机602驱动的驱动丝杠603,驱动丝杠603外壁螺纹连接有定位丝套板604,定位丝套板604底部两侧分别安装有气缸605,气缸605的输出端安装有机械爪606。
30.需要注意的是,为提高取拿拼接机构6的操作精准对,一般在实际的操作过程中会在机械爪606的下方设置红外传感器,并在需要进行夹持的受力杆、支撑杆和推杆的夹持处进行光学标记,由此能够实现更为精准的夹持拼接,此外定位丝套板604的底部受着侧边固
定架601的限位,由此配合定位丝套板604和安装定位丝套板604上的气缸605和机械爪606的质量,能够在驱动丝杠603转动的过程中定位丝套板604不发生旋转振动,驱动丝杠603旋转时产生的力小于定位丝套板604和安装定位丝套板604上的气缸605和机械爪606的质量。
31.受力杆运输带2承接与安装在固定拼装台101的取拿拼接机构6,推杆运输带3承接与安装在第二滑动拼装台106的取拿拼接机构6,支撑杆运输带4承接于安装在第一滑动拼装台103的取拿拼接机构6。
32.第一滑动拼装台103的两侧位置分别设置有支撑柱107,固定拼装台101底部固定连接有支撑架102,两支撑柱107之间以及靠近第二滑动拼装台106的支撑柱107与支撑架102之间固定连接有分别贯穿于第一滑动拼装台103和第二滑动拼装台106的两限位杆108。
33.其一支撑柱107的正面安装有控制器109,拼装铆接机构1、取拿拼接机构6、受力杆运输带2、推杆运输带3、支撑杆运输带4和出料运输带5分别与控制器109电性连接。
34.需要注意的是,设备的精准运行依赖控制器109的准确控制,控制器109能够控制整个设备的生产速度,包括对将部件的运输拼接速度以及铆钉枪111工作的速度,一般来说设备进行一个伞骨的拼装时需要耗费5-8秒,高于这个时间准确度不会有明显的提高,低于这个速度会有较高的出错风险。
35.第一滑动拼装台103相对于固定拼装台101的位置以及第一滑动拼装台103和第二滑动拼装台106相对位置能够通过旋钮105和丝杠104进行调整。
36.需要注意的是,通过固定拼装台101、第一滑动拼装台103和第二滑动拼装台106三者的相对滑动设计,能够利用旋钮105和丝杠104进行第一滑动拼装台103和第二滑动拼装台106的相对位置的调整,从而能够适应不同装配位置伞骨的拼装铆钉。
37.使用上述的碳纤维伞骨装配装置进行的工艺步骤如下。
38.步骤一;将伞骨的受力杆、支撑杆和推杆等距的分别放置在受力杆运输带2、支撑杆运输带4和推杆运输带3上;步骤二:安装在固定拼装台101上的取拿拼接机构6将运输在受力杆运输带2上的受力杆定点取拿,并放置在固定拼装台101上进行固定;步骤三:安装在第一滑动拼装台103上的取拿拼接机构6将运输在支撑杆运输带4上的支撑杆定点取拿,并放置在第一滑动拼装台103上,实现受力杆与支撑杆铆接位置的适配后进行固定;步骤四:通过安装在第一滑动拼装台103侧面的第一机械臂110利用铆钉枪111对受力杆和支撑杆铆接位置进行铆钉固定;步骤五:安装在第二滑动拼装台106上的取拿拼接机构6将运输在推杆运输带3上的推杆定点取拿,并放置在第二滑动拼装台106上,实现推杆与支撑杆铆接位置的适配后进行固定;步骤六:再次利用第一机械臂110驱动铆钉枪111对推杆和支撑杆铆接位置进行铆钉固定完成伞骨的拼接;步骤七:送松脱开固定在受力杆、支撑杆和推杆上的取拿拼接机构6,利用安装在固定拼装台101背面的第二机械臂112驱动的夹持爪113,将伞骨转移到出料运输带5。
39.步骤一中放置在受力杆运输带2、支撑杆运输带4和推杆运输带3上的受力杆、支撑杆和推杆的运输间隔为5-8秒。
40.步骤二、步骤三和步骤五对受力杆、支撑杆和推杆的取拿时间控制在1-1.5秒,步骤四和步骤六的铆钉固定时间控制在1-2秒。
41.尽管已经示出和描述了本发明的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本发明的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本发明的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1