足部三维轮廓采集系统
1.本发明涉及三维轮廓扫描领域,特别是涉及一种足部三维轮廓采集系统。
背景技术:
2.足部三维轮廓数据对于制鞋、足部疾病及畸形诊疗等领域具有重要意义。目前在获取足 部三维轮廓数据时,由于足部本身会对光线产生遮挡,因此为了采集整体足部的三维轮廓数 据,往往需要同时安置多台深度相机或多个激光传感器,从不同角度获取足部深度图像,实 现足部整体三维轮廓数据的采集和拼合。多台深度相机或多个激光传感器的使用会带来足部 三维数据采集设备成本的上升,和数据处理时间的增加,制约了足部三维数据采集设备在上 述领域的进一步应用。
技术实现要素:
3.鉴于以上所述现有技术的缺点,本发明的目的在于提供一种足部三维轮廓采集系统,用 于解决现有技术中出现的以上技术问题。
4.为实现上述目的及其他相关目的,本发明提供一种足部三维轮廓采集系统,包括:一足部表 面轮廓采集光路、一足部底部轮廓采集光路、一结构光投射光源以及一深度相机,其中足部 表面轮廓采集光路及足部底部轮廓采集光路由一半透半反镜、半透半反棱锥、设于半透半反 棱锥顶部的棱锥顶部快门、由多个反射镜以及对应设置的一或多个反射镜快门构成的足部表 面采集光路共同形成;其中,所述足部表面轮廓采集光路包括:半透半反镜、半透半反棱锥、 足部表面采集光路;其中,所述结构光投射光源向所述半透半反镜投射结构光;所述半透半 反镜将投射其上的结构光反射至所述半透半反棱锥上;所述半透半反棱锥将投射到其上的结 构光反射至所述足部表面采集光路;所述足部表面采集光路将投射到其上的结构光反射至待 测足部表面,并将待测足部表面反射回的结构光投射至所述半透半反棱锥,以供所述半透半 反棱锥将该结构光反射至所述半透半反镜,由所述半透半反镜将投射到其上的结构光投射入 所述深度相机,以采集足部表面三维轮廓数据;所述足部底部轮廓采集光路包括:半透半反 镜、半透半反棱锥、棱锥顶部快门;其中,所述结构光投射光源向所述半透半反镜投射结构 光;所述半透半反镜将投射其上的结构光反射至所述半透半反棱锥上;所述半透半反棱锥通 过打开棱锥顶部快门将投射到其上的结构光投射至待测足部底部,并将待测足部底部反射回 的结构光投射入所述深度相机,以采集足部底部三维轮廓数据。
5.于本发明的一实施例中,所述足部表面采集光路包括:一或多个分别对应一角度采集的 足部表面采集子光路。
6.于本发明的一实施例中,每个足部表面采集子光路包括:第一反射镜、第二反射镜以及 一反射镜快门;其中,在所述反射镜快门为打开状态时,所述第一反射镜将所述半透半反棱 锥投射到其上的结构光反射至所述第二反射镜;所述第二反射镜将投射到其上的结构光以一 角度投射至待测足部表面;所述第一反射镜将待测足部表面反射回的结构光
反射至所述第一 反射镜,以供所述第一反射镜将投射在其上的结构光投射至所述半透半反棱锥。
7.于本发明的一实施例中,所述半透半反棱锥包括:顶面结构以及侧面结构;其中,所述 侧面结构用于将由所述半透半反镜将投射在其上的结构光至所述足部表面采集光路以及将足 部表面采集光路投射的结构光反射至所述半透半反镜上;所述顶面结构,用于在所述棱锥顶 部快门为打开状态时,将投射到所述半透半反棱锥的结构光投射至待测足部底部,并将待测 足部底部反射回的结构光投射入所述深度相机。
8.于本发明的一实施例中,所述侧面结构包括:至少四个三角形侧面。
9.于本发明的一实施例中,所述第一反射镜与第二反射镜以两者之间反射的结构光的光轴 的垂直方向为轴对称设置。
10.于本发明的一实施例中,所述足部表面采集子光路为至少四个。
11.于本发明的一实施例中,所述结构光投射光源与半透半反镜之间设有一透镜,用于对结 构光投射光源投射的结构光进行扩束。
12.于本发明的一实施例中,所述半透半反镜与深度相机之间设有一透镜,用于对投射到其 上的结构光进行聚焦再进入所述深度相机。
13.于本发明的一实施例中,所述深度相机通过利用黑白标定板计算不同光路上经过多次反 射变换后的相机的内参矩阵、畸变矩阵及与世界坐标系之间的变换关系来进行标定。
14.如上所述,本发明的一种足部三维轮廓采集系统,具有以下有益效果:本发明通过可共 同形成足部表面轮廓采集光路以及足部底部轮廓采集光路的一半透半反镜、半透半反棱锥、 设于半透半反棱锥顶部的棱锥顶部快门、由多个反射镜以及对应设置的一或多个反射镜快门 构成的足部表面采集光路、一结构光投射光源以及一深度相机进行足部三维轮廓数据采集。 本发明实现了仅需要一个相机和一个结构光投影对足部全范围表面三维轮廓数据的获取,降 低了足部三维轮廓数据获取的成本。并且由于结构光进入相机前需要经过多次反射,在多次 反射过程中方向不一致的杂散光会被反射镜间的管壁吸收,有效降低了噪声引入的可能;本 发明的相机与待测物体间的光路相较于其他足部轮廓采集设备而言更长因此选择焦距大的镜 头,而一般焦距大的镜头球差小畸变小,提高了足部轮廓数据采集的精度。
附图说明
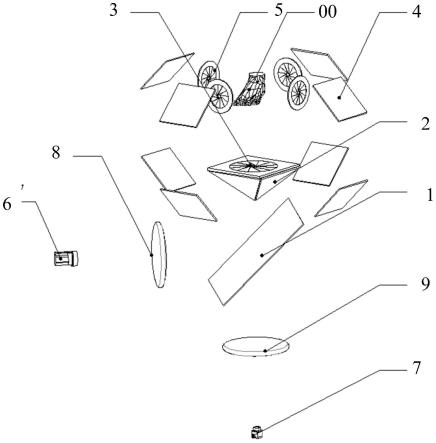
15.图1显示为本发明一实施例中的足部三维轮廓采集系统的结构示意图。
16.图2显示为本发明一实施例中的足部表面轮廓采集光路的光路示意图。
17.图3显示为本发明一实施例中的足部底部轮廓采集光路的光路示意图。
具体实施方式
18.以下通过特定的具体实例说明本发明的实施方式,本领域技术人员可由本说明书所揭露 的内容轻易地了解本发明的其他优点与功效。本发明还可以通过另外不同的具体实施方式加 以实施或应用,本说明书中的各项细节也可以基于不同观点与应用,在没有背离本发明的精 神下进行各种修饰或改变。需说明的是,在不冲突的情况下,以下实施例及
实施例中的特征 可以相互组合。
19.需要说明的是,在下述描述中,参考附图,附图描述了本发明的若干实施例。应当理解, 还可使用其他实施例,并且可以在不背离本发明的精神和范围的情况下进行机械组成、结构、 电气以及操作上的改变。下面的详细描述不应该被认为是限制性的,并且本发明的实施例的 范围仅由公布的专利的权利要求书所限定。这里使用的术语仅是为了描述特定实施例,而并 非旨在限制本发明。空间相关的术语,例如“上”、“下”、“左”、“右”、“下面”、
ꢀ“
下方”、
““
下部”、“上方”、“上部”等,可在文中使用以便于说明图中所示的一个元 件或特征与另一元件或特征的关系。
20.在通篇说明书中,当说某部分与另一部分“连接”时,这不仅包括“直接连接”的情形, 也包括在其中间把其它元件置于其间而“间接连接”的情形。另外,当说某种部分“包括
”ꢀ
某种构成要素时,只要没有特别相反的记载,则并非将其它构成要素,排除在外,而是意味 着可以还包括其它构成要素。
21.其中提到的第一、第二及第三等术语是为了说明多样的部分、成分、区域、层及/或段 而使用的,但并非限定于此。这些术语只用于把某部分、成分、区域、层或段区别于其它部 分、成分、区域、层或段。因此,以下叙述的第一部分、成分、区域、层或段在不超出本发 明范围的范围内,可以言及到第二部分、成分、区域、层或段。
22.再者,如同在本文中所使用的,单数形式“一”、“一个”和“该”旨在也包括复数形 式,除非上下文中有相反的指示。应当进一步理解,术语“包含”、“包括”表明存在所述 的特征、操作、元件、组件、项目、种类、和/或组,但不排除一个或多个其他特征、操作、 元件、组件、项目、种类、和/或组的存在、出现或添加。此处使用的术语“或”和“和/或
”ꢀ
被解释为包括性的,或意味着任一个或任何组合。因此,“a、b或c”或者“a、b和/或c
”ꢀ
意味着“以下任一个:a;b;c;a和b;a和c;b和c;a、b和c”。仅当元件、功 能或操作的组合在某些方式下内在地互相排斥时,才会出现该定义的例外。
23.本发明实施例中提供一种足部三维轮廓采集系统,通过可共同形成足部表面轮廓采集光 路以及足部底部轮廓采集光路的一半透半反镜、半透半反棱锥、设于半透半反棱锥顶部的棱 锥顶部快门、由多个反射镜以及对应设置的一或多个反射镜快门构成的足部表面采集光路、 一结构光投射光源以及一深度相机进行足部三维轮廓数据采集。本发明实现了仅需要一个相 机和一个结构光投影对足部全范围表面三维轮廓数据的获取,降低了足部三维轮廓数据获取 的成本。并且由于结构光进入相机前需要经过多次反射,在多次反射过程中方向不一致的杂 散光会被反射镜间的管壁吸收,有效降低了噪声引入的可能;本发明的相机与待测物体间的 光路相较于其他足部轮廓采集设备而言更长因此选择焦距大的镜头,而一般焦距大的镜头球 差小畸变小,提高了足部轮廓数据采集的精度。
24.下面以附图为参考,针对本发明的实施例进行详细说明,以便本发明所述技术领域的技 术人员能够容易地实施。本发明可以以多种不同形态体现,并不限于此处说明的实施例。
25.如图1所示,展示本发明实施例中的足部三维轮廓采集系统的结构示意图。
26.所述系统包括:足部表面轮廓采集光路、足部底部轮廓采集光路、一结构光投射光源6 以及一深度相机7,其中足部表面轮廓采集光路及足部底部轮廓采集光路可由一半透半反镜 1、半透半反棱锥2、设于半透半反棱锥2顶部的棱锥顶部快门3、由多个反射镜4以及
对应 设置的一或多个反射镜快门5构成的足部表面采集光路共同形成;
27.其中,所述足部表面轮廓采集光路用于待测足部00的足部表面三维轮廓数据;所述足部 底部轮廓采集光路用于足部底部三维轮廓数据;
28.所述足部表面轮廓采集光路包括:所述结构光投射光源6、半透半反镜1、半透半反棱锥 2、足部表面采集光路;如图2为所述足部表面轮廓采集光路的光路图,所述结构光投射光源 6向所述半透半反镜1投射结构光,之后所述半透半反镜1将投射其上的结构光反射至所述 半透半反棱锥2上;所述半透半反棱锥2再将所述半透半反镜1反射到其上的结构光反射至 所述足部表面采集光路;所述足部表面采集光路将反射到其上的结构光反射至待测足部表面, 并将待测足部表面反射回的结构光投射至所述半透半反棱锥2,以供所述半透半反棱锥2将 该结构光反射至所述半透半反镜1,由所述半透半反镜1将投射到其上的结构光投射入所述 深度相机7,以采集足部表面三维轮廓数据;
29.所述足部底部轮廓采集光路包括:所述结构光投射光源6、半透半反镜1、半透半反棱锥 2、棱锥顶部快门3;图3为所述足部表面轮廓采集光路的光路图,所述结构光投射光源6向 所述半透半反镜1投射结构光,所述半透半反镜1将投射其上的结构光反射至所述半透半反 棱锥2上;所述半透半反棱锥2通过打开棱锥顶部快门3将投射到其上的结构光投射至待测 足部底部,并将待测足部底部反射回的结构光投射入所述深度相机7,以采集足部底部三维 轮廓数据。
30.在一实施例中,所述足部表面采集光路包括:一或多个分别对应一角度采集的足部表面 采集子光路,用于分别从一角度采集足部表面,以供采集覆盖完整的足部表面轮廓。优选的, 所述足部表面采集子光路为至少四个;例如四个足部表面采集子光路对称设置,且间隔相同, 共覆盖360度的足部表面。
31.在一实施例中,如图3所示,每个足部表面采集子光路包括:第一反射镜41、第二反射 镜42以及一反射镜快门5;
32.其中,在所述反射镜快门5为打开状态时,所述第一反射镜41将所述半透半反棱锥2投 射到其上的结构光反射至所述第二反射镜42;所述第二反射镜42将投射到其上的结构光以 一角度投射至待测足部表面;所述第一反射镜41将待测足部表面反射回的结构光反射至所述 第一反射镜41,以供所述第一反射镜41将投射在其上的结构光投射至所述半透半反棱锥2; 在所述反射镜快门5为关闭状态时,此光路上的结构光被反射镜快门5隔断,避免对其他光 路构成影响。
33.需要说明的是,若所述足部表面采集子光路为一个,则在需要采集足部表面轮廓数据时, 则需将该光路的反射镜快门5打开即可(需保证所述棱锥顶部快门3关闭),此时所述结构 光投射光源向所述半透半反镜投射结构光;所述半透半反镜将投射其上的结构光反射至所述 半透半反棱锥上;所述半透半反棱锥将投射到其上的结构光反射至所述第一反射镜41上,所 述第一反射镜41将所述半透半反棱锥2投射到其上的结构光反射至所述第二反射镜42;所 述第二反射镜42将投射到其上的结构光以一角度投射至待测足部表面;所述第一反射镜41 将待测足部表面反射回的结构光反射至所述第一反射镜41,以供所述第一反射镜41将投射 在其上的结构光投射至所述半透半反棱锥2,所述半透半反棱锥2将该结构光反射至所述半 透半反镜1,由所述半透半反镜1将投射到其上的结构光投射入所述深度相机7,以采集足部 表面三维轮廓数据;
34.若所述足部表面采集子光路为多个,分别通过各足部表面采集子光路进行对应角度的足 部表面轮廓数据采集,首选通过一足部表面采集子光路进行采集,将该光路的反射镜快门5 打开,并保证其他足部表面采集子光路中的反射镜快门5以及所述棱锥顶部快门3关闭;一 个足部表面采集子光路采集完数据,再关闭该光路的反射镜快门5,再打开下一足部表面采 集子光路的反射镜快门5,即进行下一足部表面采集子光路的数据采集。由于每个角度的投 影和拍摄的光路上均有快门控制光路的开关,确保不同角度采集足部数据时的杂散光干扰, 提高采集得到的数据的精度。
35.优选的,所述第一反射镜41与第二反射镜42以两者之间反射的结构光的光轴的垂直方 向为轴对称设置;且倾斜角度一致,以及倾斜方向相反。由于倾斜角度为45度。
36.在一实施例中,所述半透半反棱锥包括:顶面结构以及侧面结构;其中,所述侧面结构 用于将由所述半透半反镜将投射在其上的结构光至所述足部表面采集光路以及将足部表面采 集光路投射的结构光反射至所述半透半反镜上;所述顶面结构,用于在所述棱锥顶部快门为 打开状态时,将投射到所述半透半反棱锥的结构光投射至待测足部底部,并将待测足部底部 反射回的结构光投射入所述深度相机。
37.需要说明的是,需要采集足部底部三维轮廓数据时,如图1,打开所述棱锥顶部快门3, 并保证各足部表面采集子光路的反射镜快门5关闭,所述结构光投射光源6向所述半透半反 镜1投射结构光;所述半透半反镜1将投射其上的结构光反射至所述半透半反棱锥2的侧面 结构上;所述半透半反棱锥2将投射到其上的结构光通过顶面结构透射至待测足部底部,并 将待测足部底部反射回的结构光投射入所述深度相机7,以采集足部底部三维轮廓数据。
38.在一实施例中,所述侧面结构包括:至少四个三角形侧面。
39.在一实施例中,所述结构光投射光源6与半透半反镜1之间设有一透镜8,用于对结构 光投射光源6投射的结构光进行扩束,提高投影的面积,保证分光后每条光路上有足够的结 构光投影。
40.在一实施例中,所述半透半反镜1与深度相机之间7设有一透镜9,用于对投射到其上 的结构光进行聚焦再进入所述深度相机7。令由所述半透半反镜1投射到其上的结构光以及 所述半透半反棱锥2投射的结构光经过聚焦再进入所述深度相机7。
41.在一实施例中,所述深度相机通过利用黑白标定板计算不同光路上经过多次反射变换后 的相机的内参矩阵、畸变矩阵及与世界坐标系之间的变换关系来进行标定,以供深度相机获 取深度图并获取足部表面三维轮廓数据。
42.为了更好的说明上述足部三维轮廓采集系统,本发明提供以下具体实施例。
43.实施例1:一种足部三维轮廓采集系统。
44.所述系统包括:平面镜、半透棱锥、半透镜、透镜、ccd相机、投射光源、透镜、棱锥 顶部快门以及平面镜快门;其中,
45.投射光源用来投射结构光,经过透镜扩束后,一面或以上方形半透半反镜反射结构光到 四面或以上三角形半透半反镜组成的半透半反棱锥上。一部分结构光在半透半反棱锥上反射 到八面或以上方形平面镜(按一定角度分布在同一空间内用来从四个或以上角度采集足部上 表面轮廓数据)后经过反射上打到四个或以上的平面镜快门上。一部分结构光在半透半反棱 锥上透射到棱锥顶部快门。按次序每次打开一个平面镜快门,结构光从
一定角度打到待测足 足部表面而后反射回来,两次经过平面镜反射后打到半透半反棱锥上经过反射进入半透半反 镜,透射到透镜上经过聚焦进入ccd相机,完成采集后关上此次打开的快门,打开下一个平 面镜快门。
46.所有平面镜快门关闭后,打开棱锥顶部快门,结构光投射到足底,反射回来经过半透半 反棱锥透射到透镜上经过聚焦进入相机,完成采集后关上快门。至此足部三维表面全部轮廓 数据均已得到采集。
47.本实施例借助基于反射镜和半透半反镜设计的分光光路,可以仅用单个结构光投影和单 个相机实现足部多角度的投影和拍摄,从而实现对整个足部三维轮廓数据的采集。每个角度 的投影和拍摄的光路上均有快门控制光路的开关,确保不同角度采集足部数据时的杂散光干 扰,提高采集得到的数据的精度。投影前借助基于透镜设计的扩束光路,提高投影的面积, 保证分光后每条光路上有足够的结构光投影。
48.综上所述,本发明足部三维轮廓采集系统,通过可共同形成足部表面轮廓采集光路以及 足部底部轮廓采集光路的一半透半反镜、半透半反棱锥、设于半透半反棱锥顶部的棱锥顶部 快门、由多个反射镜以及对应设置的一或多个反射镜快门构成的足部表面采集光路、一结构 光投射光源以及一深度相机进行足部三维轮廓数据采集。本发明实现了仅需要一个相机和一 个结构光投影对足部全范围表面三维轮廓数据的获取,降低了足部三维轮廓数据获取的成本。 并且由于结构光进入相机前需要经过多次反射,在多次反射过程中方向不一致的杂散光会被 反射镜间的管壁吸收,有效降低了噪声引入的可能;本发明的相机与待测物体间的光路相较 于其他足部轮廓采集设备而言更长因此选择焦距大的镜头,而一般焦距大的镜头球差小畸变 小,提高了足部轮廓数据采集的精度。所以,本发明有效克服了现有技术中的种种缺点而具 高度产业利用价值。
49.上述实施例仅示例性说明本发明的原理及其功效,而非用于限制本发明。任何熟悉此技 术的人士皆可在不违背本发明的精神及范畴下,对上述实施例进行修饰或改变。因此,但凡 所属技术领域中具有通常知识者在未脱离本发明所揭示的精神与技术思想下所完成的一切等 效修饰或改变,仍应由本发明的权利要求所涵盖。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1