一种足弓测量方法及以足弓系数为主的鞋垫定制方法与流程
1.本发明涉及图像采集技术领域,计算机3d建模技术领域以及3d打印技术领域,尤其涉及一种足弓测量方法及以足弓系数为主的鞋垫定制方法。。
背景技术:
2.随着现代城市化发展的进程,硬化道路以及房屋地面的增多以及出行方式的便捷性,足部发育缺乏锻炼以及良好的发育环境。扁平足及足弓发育不良的症状愈来愈多。
3.人体的足弓部位主要是用来吸收震荡、缓解身体压力,而足弓发育不好会造成扁平足或高弓足,进而引起脚掌肌肉软弱无力,抓地力弱,平衡稳定性不好,以及缺乏足弓支撑与弹性,引起人体生物力线倾斜,影响身体其他部位的发育。
4.儿童的足部骨骼都是正在发育的软骨,骨骼间隙大且尚未完全定形,骨骼结构不稳定,容易被外界的环境所影响,wolff定律指出:骨骼的生长会受到力学刺激影响而改变其结构。
5.所以在儿童发育早期,能够及时准确检测出其足弓发育情况,并通过矫正拥有一双强健的脚,对促进儿童身体健康发育具有非常大的意义。
6.现有的技术大多采用蘸迹法测量足印或使用手动测量足印的方法得到的数据准确性差、可信度低,并且测量效率较低、不易推广,而且大多是测量足形并根据足形制作鞋子的方法,缺少自动测量和自动识别足弓系数判断足弓发育情况来定制合适鞋垫的方法。
7.鞋垫可以对足弓起到支撑作用,而不同人的足弓发育情况不一样,因此通过足弓发育情况定制适合的鞋垫,可以在保证舒适性的前提下来促进用户足弓更健康的发育。
8.现有的技术大多是通过大众足形来批量制作成品的鞋垫,部分鞋垫设计足弓支撑来降低足压提升舒适度,但也不能够很好的与所有患者足部情况进行匹配。而在儿童早期骨骼未闭合的状态用鞋垫产品营造一个良好的发育环境来保证儿童足部发育是十分有科学的且有必要的。
技术实现要素:
9.一种足弓测量方法,所述方法包括如下步骤:s1. 待测足平踏于图像采集设备的采集台上,采集台由组成,通过绿色辅助光源照射,在所述图像采集设备的采集台上形成绿色足印;s2. 采用电子摄像装置对所述图像采集设备的采集台上形成的足印拍照,得到足印图像;s3. 对所述足印图像进行灰度处理,将所述足印图像中像素点的颜色在ycc值是(0, 80, 90)到ycc值是(255, 255, 230)区间内的像素点设置为黑色,不在所述颜色区间内的像素点设置为白色,得到一个黑白的足印;s4. 对上述经过灰度处理后的所述足印图像进行旋转,先识别足跟内侧最凸点(p1)、第一跖骨最凸点(p2)、第一跖骨关节最凸点(p2)与水平横坐标相交的点(c),然后依
次连接这三点构成一个三角形(p1cp2),已知p1、p2、c三点的坐标,可算出三角形三条边p1p2、p1c、p2c的长度,使用余弦公式可计算出∠p1cp2的角度,并计算p1p2两点的斜率,若所述斜率大于0,则将所述足印图像顺时针旋转∠p1cp2度,若所述斜率小于0,则将所述足印图像逆时针旋转(360-∠p1cp2)度,然后再次计算p1p2两点间连线的斜率,若所述斜率为0则可将所述足印图像显示正,若所述斜率不为0则重复旋转操作直到斜率为0;s5. 通过识别步骤4处理后的足印图像上的第一跖骨关节最凸点、足跟内侧最凸点和足弓最凸点来判断被测足类型是标准脚还是非标准脚,其中所述第一跖骨关节最凸点与所述足跟内侧最凸点的连线形成足弓内侧切线;s6. 根据所述被测足类型来识别足弓位置和足弓与垂线的延长线与足印外侧的交点,其中所述足弓位置与所述足弓内侧切线垂直相交的点连线形成所述足弓位置与所述足弓内侧切线的垂线; s7. 根据所述第一跖骨关节最凸点、所述足跟内侧最凸点、所述足弓位置和所述足弓与垂线的延长线与所述足印外侧的交点这四个点来计算被测足的足弓系数ac,所述足弓系数ac=p0p3/p3p4,其中p0p3为所述足弓位置(p3)到所述第一跖骨关节最凸点跟所述足跟内侧最凸点形成的切线之间的垂线,p3p4为所述足弓位置(p3)到所述足弓与垂线的延长线与足印外侧的交点(p4)的连线。
10.还包括,旋转操作完成后将所述足印图像的足印部分转换为绿色显示;将所述足印图像的足印部分转换为绿色显示的步骤是:设置最小、最大连续数为(5000,2147483647),循环取当前像素的下一个像素点去判断取到的像素区域是否是黑色并且满足所述的最小最大连续数范围,其中连续数是指:一个黑色的像素点的下一个像素点也是黑色的话,则表示这两个像素点连续,连续数是2,以此类推,将满足条件的像素点设置为绿色,否则设置为白色,最终得到一个绿色足印。
11.所述电子摄像装置主要是由两个高清图像采集摄像头构成,两个摄像头分别负责采集由所述图像采集设备产生的左右脚足底图像;所述电子摄像装置安装在图像采集设备内侧。
12.所述步骤5识别所述第一跖骨关节最凸点、所述足跟内侧最凸点和所述足弓最凸点来判断脚类型的步骤是: (1)将足印放在一个坐标系中,这样可取到足印的所有像素数据,如足印的最大纵坐标、足印的最小纵坐标、足印的最大横坐标和足印的最小横坐标;(2)足跟内侧最凸点(p1):足长的下五分之四范围内最凸的点,即右足长的下五分之四范围内足印的横坐标最大的点的位置(左足弓时取所述左足长的下五分之四范围内足印的横坐标最小的点的位置),所述足长下五分之四范围的计算公式=(所述足印的最大纵坐标(maxy)-所述足印的最小纵坐标(miny))/5;(3)第一跖骨关节最凸点(p2):足长的上三分之一范围内最凸的点,即右足长的上三分之一范围内横坐标最大的点(左足弓时取左足长的上三分之一范围内横坐标最小的点),所述足长上三分之一范围的计算公式=所述足印的最大纵坐标(maxy)-(2*(所述足印的最大纵坐标-所述足印的最小纵坐标)/3);(4)足弓最凸点:即所述足跟内侧最凸点和所述第一跖骨关节最凸点之间最凸的点;
(5)由以上三点判断脚类型:若所述右足弓最凸点p3)的横坐标大于(左足弓时小于)所述足跟内侧最凸点(p1)的横坐标并且所述右足弓最凸点(p3)的横坐标大于(左足弓时小于)所述第一跖骨关节最凸点(p2)的横坐标则表明足弓凸出视为非标准脚,否则表明足弓凹陷视为标准脚。
13.所述步骤6根据所述被测足类型来识别所述足弓位置和所述足弓与垂线的延长线与足印外侧的交点的步骤是:(1)根据所述标准脚类型识别足弓位置的逻辑是:取出所述右足跟内侧最凸点和所述第一跖骨关节最凸点之间最凹的点,即所述右足跟内侧最凸点和所述第一跖骨关节最凸点之间横坐标最小的点(左足弓时取连续前两个像素点是白色,第三个像素点是绿色的点中横坐标最大的点)就是要取的足弓位置(p3);(2)根据所述非标准脚类型识别足弓位置的逻辑是:取出所述右足跟内侧最凸点和所述第一跖骨关节最凸点之间最凸的点,即所述右足跟内侧最凸点和所述第一跖骨关节最凸点之间横坐标最大的点(左足弓时横坐标最小的点)就是要取的足弓位置(p3);(3) 连接所述足弓位置(p3)与所述足弓内侧切线垂直相交的点(p0)生成所述足弓位置与所述足弓内侧切线的垂线;所述垂线与所述足弓内侧切线相交的点的坐标的计算逻辑:若所述足弓内侧切线的斜率为0,则所述垂线与所述足弓内侧切线相交的点(p0)的横坐标就是所述足跟内侧最凸点的横坐标,所述垂线与所述足弓内侧切线相交的点(p0)的纵坐标就是所述足弓位置的纵坐标;若所述切线的斜率不为0,则所述垂线与所述足弓内侧切线相交的点(p0)的横坐标=(((-p1.y)+p1.x/k)-((-p3.y)-k*p3.x))/(k+1/k),其中p1.y表示所述足跟内侧最凸点的纵坐标,p1.x表示所述足跟内侧最凸点的横坐标,p3.y表示所述足弓位置的纵坐标;所述垂线与所述切线相交的点(p0)的纵坐标=k*p0.x+((-p3.y)-k*p3.x),其中p0.x表示所述垂线与所述足弓内侧切线相交的点的横坐标,p3.x表示所述足弓位置的横坐标,p3.y表示所述足弓位置的纵坐标;(4)所述足弓位置与所述垂线的延长线与足印外侧的交点是所述右足跟内侧最凸点和所述第一跖骨关节最凸点之间的像素点中与所述垂线的延长线相交的点中横坐标最小(左足弓时取横坐标最大)的绿色像素点。
14.一种根据足弓系数定制鞋垫的方法,采用上述方法测量足弓系数acs1.所述鞋垫功能区域主要包括前掌部分,足弓支撑部分,足跟跟杯部分;s2.所述鞋垫包括底部决定形状的基底层,中部缓震层,顶部的与足部接触的面层;s3.对于足弓系数ac在进行区间划分,每个足弓系数区间对应一个促发育系数;根据不同的鞋垫促发育系数进行鞋垫足弓部位的形态设计。帮助儿童足部进行逐步发育;s3.对儿童体重进行区间划分,不同体重对应不同的基底层内部填充密度或基底层填充结构;s5.进行完整产品模型设计,利用3d打印技术进行鞋垫的制作;s6.将基底层,中部缓震层以及顶部与足部接触的面层进行组合装配;
鞋垫在顶部平面视图将鞋垫分为三个区域,足部第一跖骨与第五跖骨连线中点位置远离跟骨部位的区域为前掌部分,靠近脚尖的32%的区域,骰骨远端靠近足跟部位的整个区域为足跟跟杯部分,为鞋垫靠近足跟部份的27%的区域。足跟跟杯与前掌部分中间所夹区域为足弓部分,为鞋垫中部的41%的区域,整体功能区域划分见图11,利用3d建模软件进行鞋垫的模型建立。鞋垫长度长于足长8-16mm,鞋垫宽度与足部前掌等宽。
15.将足弓系数ac进行区间划分,每个足弓系数a-b对应鞋垫促发育系数c,c≥b,鞋垫基底层足弓部分的上表面形态由促发育系数决定。
16.将足弓系数ac分为四个区间,分别为0-0.32,0.32-0.58,0.58-0.75,0.75-0.93。由上述区间顺序,足弓系数区间对应的鞋垫促发育系数分别为0.32,0.58,0.75,0.93,由鞋垫的后跟部分至前掌部分的平行视角gz方向,过鞋垫基底层的最顶点h点垂直于gz线的hgz平面观察基底层在此位置的剖面,促发育系数对应基底上表面足弓部分的剖面线函数曲线分别为,0.32对应y=0.0084x
²
+0.38x+5.34,0.58对应y=0.01x
²
+0.497x+7.05,0.75对应y=0.0095x
²
+0.38x+4.7625,0.93对应y=0.0116x
²
+0.45x+5.44,对基底层足弓支撑部分沿鞋垫长度方向沿鞋垫中线分割,分割后其切面顶部的曲线为y=-0.0039x
²‑
0.199x+2.36(0≤x≤75)所呈现形态,具体曲线形态如图12。
17.10.根据权力要求6所述的促发育鞋垫在足弓部分根据足弓系数ac进行设计,其特征在于促发育鞋垫矫正系数为0.32,0.58,0.75,0.93的鞋垫;s1.促发育系数为0.32的鞋垫基底层最顶点至基底层底面高度为10.4mm。鞋垫基底高点与基底顶面中点连线与基底地面构成的夹角∠hml为12.4
°
。足弓部位内侧顶部至基底顶面中点连线高度h-ml为6.0mm;s2.促发育系数为0.58的鞋垫基底层最顶点至基底层底面高度为11.4mm。鞋垫基底高点与基底顶面中点连线与基底地面构成的夹角∠hml为13.8
°
。足弓部位内侧顶部至基底顶面中点连线高度h-ml为7.5mm;s3.促发育系数为0.75的鞋垫基底层最顶点至基底层底面高度为13.0mm。鞋垫基底高点与基底顶面中点连线与基底地面构成的夹角∠hml为16.8
°
。足弓部位内侧顶部至基底顶面中点连线高度h-ml为9.1mm;s4.促发育系数为0.93的鞋垫基底层最顶点至基底层底面高度为15.2mm。鞋垫基底高点与基底顶面中点连线与基底地面构成的夹角∠hml为20.5
°
。足弓部位内侧顶部至基底顶面中点连线高度h-ml为11.2mm;不同体重对应不同的基底层不同的内部填充密度或填充结构。将儿童的体重同样进行区间划分,通过调整3d打印内部填充密度,或内部填充结构,或两者同时进行调节来改变产品舒适度,给身体条件不同的儿童匹配相应舒适度的鞋垫。
18.鞋垫基底层内部填充为非致密填充的镂空结构,例如正六边形蜂窝状孔洞或十字线性交叉结构等。
19.鞋垫在足跟跟杯部分,呈椭球形凹陷形态且具有超过4mm(基底跟杯部分最靠后端的最高点至基底跟杯部分顶面最低点距离)以上的跟沿包裹,能够有利于足跟形态或位置的定位及矫正。
20.实施本发明的足弓测量方法以及根据足弓系数定制鞋垫的方法,具有以下有益效果:本发明的足弓测量方法可以方便快捷的自动识别出足的足弓系数,判断出足弓的发育
情况,避免了手工操作造成准确性差、测量效率低、不易推广的问题;并根据足弓的发育情况定制合适的鞋垫,根据用户身体数据定制不同的产品硬度,在保证舒适度的前提下分阶段性地,逐步地促进儿童的足部健康发育。
附图说明
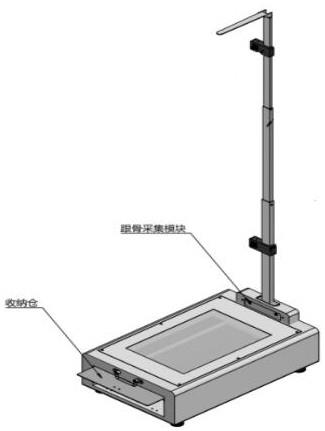
21.图1是本发明的产品外观示意图;图2是本发明的图像采集平台模块的站立平台示意图;图3至图7是本发明的足弓自动识别处理后图像示意图;图8是图像采集模块剖视图;图9是图像采集模块测剖视足弓原理图;图10是图像采集模块正剖视原理图;图11是不同矫正系数对应的断面函数曲线;图12是基底层足弓支撑部分中线纵向剖面图及剖面顶部曲线示意图;图13是内部填充结构调节示意图;图14是鞋垫结构示意图;图15是鞋垫功能分区示意图;图16是基底横弓横向剖面特征示意图;图17是不同体重对应鞋垫舒适度及制造参数示意图。
具体实施方式
22.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施条例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
23.为了使本发明的目的、实现方法、特征和效果更易于理解,下面结合具体图示详细说明本发明的具体实施方式。
24.如图1所示,为本发明的产品外观示意图,本发明的产品也叫图像采集设备,主要由采集台、收纳箱和电子摄像装置构成;其中所述图像采集设备的采集台由绿色钢化玻璃构成;内置了电子摄像装置,用于拍摄足底照片。
25.本发明的足弓测量方法主要包括如下步骤:s1. 待测足平踏于图像采集设备的采集台(如图2)上,采集台由钢化玻璃组成,通过绿色辅助光源照射,在所述图像采集设备的采集台上形成绿色足印;s2. 采用电子摄像装置对所述图像采集设备的采集台上形成的足印拍照,得到足印图像(如图3);s3. 对所述足印图像进行灰度处理,将所述足印图像中像素点的颜色在ycc值是(0, 80, 90)到ycc值是(255, 255, 230)区间内的像素点设置为黑色,不在所述颜色区间内的像素点设置为白色,得到一个黑白的足印(如图4);s4. 对上述经过灰度处理后的所述足印图像进行旋转,先识别足跟内侧最凸点p1(p1x,p1y)、第一跖骨最凸点p2(p2x,p2y)、第一跖骨关节最凸点(p2)与水平横坐标相交的
点(c),然后依次连接这三点构成一个三角形(p1cp2),已知p1、p2、c三点的坐标,可算出三角形三条边p1p2、p1c、p2c的长度,使用余弦公式可计算出∠p1cp2的角度,并计算p1p2两点的斜率,若所述斜率大于0,则将所述足印图像顺时针旋转∠p1cp2度,若所述斜率小于0,则将所述足印图像逆时针旋转(360-∠p1cp2)度,然后再次计算p1p2两点间连线的斜率,若所述斜率为0则可将所述足印图像显示正(如图5),若所述斜率不为0则重复旋转操作直到斜率为0;s5. 通过识别步骤4处理后的足印图像上的第一跖骨关节最凸点(如图6的p2点所示)、足跟内侧最凸点(如图6的p1点所示)和足弓最凸点来判断被测足类型是标准脚还是非标准脚,其中所述p1点与所述p2点的连线形成足弓内侧切线;s6. 根据所述被测足类型来识别足弓位置(如图6的p3点所示)和足弓与垂线的延长线与足印外侧的交点(如图6的p4点所示),其中所述足弓位置与所述足弓内侧切线垂直相交的点连线形成所述足弓位置与所述足弓内侧切线的垂线;s7. 根据所述第一跖骨关节最凸点p2、所述足跟内侧最凸点p1、所述足弓位置p3和所述足弓与垂线的延长线与所述足印外侧的交点p4这四个点来计算被测足的足弓系数ac,所述足弓系数ac=p0p3/p3p4,其中p0p3为所述p3点到所述p1点跟所述p2点形成的切线之间的垂线,p3p4为所述p3点到所述p4点的连线。
26.在步骤s1中,双脚尽量竖直站立,左右分开,双脚间距约10cm,所述采集设备的采集台是被采集者站立的支撑平台。
27.在步骤s2中,所述电子摄像装置主要是由两个高清图像采集摄像头构成,两个摄像头分别负责采集由所述图像采集设备产生的左右脚足底图像;所述电子摄像装置安装在图像采集设备内侧。
28.在步骤s4中,还包括,旋转操作完成后将所述足印图像的足印部分转换为绿色显示;将所述足印图像的足印部分转换为绿色显示的步骤是:设置最小、最大连续数为(5000,2147483647),循环取当前像素的下一个像素点去判断取到的像素区域是否是黑色并且满足所述的最小最大连续数范围,其中连续数是指:一个黑色的像素点的下一个像素点也是黑色的话,则表示这两个像素点连续,连续数是2,以此类推,将满足条件的像素点设置为绿色,否则设置为白色,最终得到一个绿色足印。
29.在步骤s5中,识别所述第一跖骨关节最凸点p2(p2x,p2y)(如下图6的p2点)、所述足跟内侧最凸点p1(p1x,p1y)(如下图6的p1点)和所述足弓最凸点来判断脚类型的步骤是:(1)将足印放在一个坐标系中,这样可取到足印的所有像素数据,如足印的最大纵坐标、足印的最小纵坐标、足印的最大横坐标和足印的最小横坐标。
30.(2)足跟内侧最凸点(p1):足长的下五分之四范围内最凸的点,即右足长的下五分之四范围内足印的横坐标最大的点的位置(左足弓时取所述左足长的下五分之四范围内足印的横坐标最小的点的位置),所述足长下五分之四范围的计算公式=(所述足印的最大纵坐标(maxy)-所述足印的最小纵坐标(miny))/5;(3)第一跖骨关节最凸点(p2):足长的上三分之一范围内最凸的点,即右足长的上三分之一范围内横坐标最大的点(左足弓时取左足长的上三分之一范围内横坐标最小的点),所述足长上三分之一范围的计算公式=所述足印的最大纵坐标(maxy)-(2*(所述足印的最大纵坐标-所述足印的最小纵坐标)/3);
(4)足弓最凸点:即所述足跟内侧最凸点和所述第一跖骨关节最凸点之间最凸的点;(5)由以上三点判断脚类型:若所述右足弓最凸点p3)的横坐标大于(左足弓时小于)所述足跟内侧最凸点(p1)的横坐标并且所述右足弓最凸点(p3)的横坐标大于(左足弓时小于)所述第一跖骨关节最凸点(p2)的横坐标则表明足弓凸出视为非标准脚,否则表明足弓凹陷视为标准脚。
31.在步骤s6中,根据所述被测足类型来识别所述足弓位置p3(p3x,p3y)(如下图6的p3点)和所述足弓与垂线的延长线与足印外侧的交点p4(p4x,p4y)(如下图6的p4点)的步骤是:(1)根据所述标准脚类型识别足弓位置的逻辑是:取出所述p1点和所述p2点之间最凹的点,即所述p1点和所述p2点之间横坐标最小的点(左足弓时取连续前两个像素点是白色,第三个像素点是绿色的点中横坐标最大的点)就是要取的足弓位置(p3);(2)根据所述非标准脚类型识别足弓位置的逻辑是:取出所述右足跟内侧最凸点和所述第一跖骨关节最凸点之间最凸的点,即所述右足跟内侧最凸点和所述第一跖骨关节最凸点之间横坐标最大的点(左足弓时横坐标最小的点)就是要取的足弓位置(p3);(3) 连接所述足弓位置(p3)与所述足弓内侧切线垂直相交的点(p0)生成所述足弓位置与所述足弓内侧切线的垂线;所述垂线与所述足弓内侧切线相交的点的坐标的计算逻辑:若所述足弓内侧切线的斜率为0,则所述垂线与所述足弓内侧切线相交的点(p0)的横坐标就是所述足跟内侧最凸点的横坐标,所述垂线与所述足弓内侧切线相交的点(p0)的纵坐标就是所述足弓位置的纵坐标;若所述切线的斜率不为0,则所述垂线与所述足弓内侧切线相交的点(p0)的横坐标=(((-p1.y)+p1.x/k)-((-p3.y)-k*p3.x))/(k+1/k),其中p1.y表示所述足跟内侧最凸点的纵坐标,p1.x表示所述足跟内侧最凸点的横坐标,p3.y表示所述足弓位置的纵坐标;所述垂线与所述切线相交的点(p0)的纵坐标=k*p0.x+((-p3.y)-k*p3.x),其中p0.x表示所述垂线与所述足弓内侧切线相交的点的横坐标,p3.x表示所述足弓位置的横坐标,p3.y表示所述足弓位置的纵坐标;(4)所述足弓位置与所述垂线的延长线与足印外侧的交点是所述右足跟内侧最凸点和所述第一跖骨关节最凸点之间的像素点中与所述垂线的延长线相交的点中横坐标最小(左足弓时取横坐标最大)的绿色像素点。
32.在步骤s7中,计算待测足的足弓系数ac,该步骤由计算机完成,足弓系数可以用来衡量待测足的足弓发育程度;当足弓系数为1~3时,可以认为足弓发育程度是正常的,当足弓系数为0.75~0.93时,认为足弓发育程度为轻度扁平足,当足弓系数为0.58~0.75时,认为足弓发育程度为中度扁平足,当足弓系数为0.32~0.58时,认为待测足属于重度扁平足,当足弓系数ac≤0.32时,认为待测足属于严重扁平足,当足弓系数大于3时,认为待测足属于高弓足。
33.以上介绍了进性足弓测量和数据处理的方法步骤,下面介绍如何根据测量数据进行促发育鞋垫的定制方法,具体步骤如下。
34.首先对鞋垫功能区域进行划分,鞋垫包括前掌部分,足弓支撑部分,足弓跟杯部
分。足部第一跖骨与第五跖骨连线中点位置原理根骨部位的区域为前掌部分,为鞋垫靠近脚尖的32%的区域。骰骨远端靠近足跟部位的整个区域为足跟跟杯部分,为鞋垫靠近足跟部份的27%的区域。跟根部部分与前掌部分中间所夹区域为足弓部分,为鞋垫中部的41%的区域。利用rhino等3d建模软件进行鞋垫的模型进行尺寸的框架建立。绘制各功能分区部分。
35.鞋垫模型设计其长度大于足长8-16mm。鞋垫宽度与足部前掌宽度相同。
36.根据标准的足部轮廓形态模板缩放绘制鞋垫的平面轮廓框线。并利用建模软件工具进行厚度为1mm的基础模型建立。在前掌部分,足弓支撑部分以及足跟跟杯部分进行x轴,y轴各方向大于等于5个控制点的点位布置。
37.然后对足弓系数ac进行划分判定,足弓系数ac≤0.32,ac=0.32-0.58,ac=0.58-0.75,ac=0.75-0.93。判定儿童为何种程度的扁平足症状。确定其促发育系数,ac≤0.32的促发育系数为0.32,ac=0.32-0.58的促发育系数为0.58,ac=0.58-0.75的促发育系数为0.75,ac=0.75-0.93的促发育系数为0.93。
38.根据上述区间划分确定鞋垫基底足弓支撑部分中部的促发育系数,不同的促发育系数对应不同的形态及参数特征。促发育系数对应基底上表面足弓部分的剖面线函数曲线分别为,0.32对应y=0.0084x
²
+0.38x+5.34,0.58对应y=0.01x
²
+0.497x+7.05,0.75对应y=0.0095x
²
+0.38x+4.7625,0.93对应y=0.0116x
²
+0.45x+5.44。
39.s1.促发育系数为0.32的鞋垫基底层最顶点至基底层底面高度为10.4mm。鞋垫基底高点与基底顶面中点连线与基底地面构成的夹角∠hml为12.4
°
。足弓部位内侧顶部至基底顶面中点连线高度h-ml为6.0mm。
40.s2.促发育系数为0.58的鞋垫基底层最顶点至基底层底面高度为11.4mm。鞋垫基底高点与基底顶面中点连线与基底地面构成的夹角∠hml为13.8
°
。足弓部位内侧顶部至基底顶面中点连线高度h-ml为7.5mm。
41.s3.促发育系数为0.75的鞋垫基底层最顶点至基底层底面高度为13.0mm。鞋垫基底高点与基底顶面中点连线与基底地面构成的夹角∠hml为16.8
°
。足弓部位内侧顶部至基底顶面中点连线高度h-ml为9.1mm。
42.s4.促发育系数为0.93的鞋垫基底层最顶点至基底层底面高度为15.2mm。鞋垫基底高点与基底顶面中点连线与基底地面构成的夹角∠hml为20.5
°
。足弓部位内侧顶部至基底顶面中点连线高度h-ml为11.2mm。
43.根据足弓支撑部分的促发育函数曲线绘制基底层顶端断面,并通过控制点的调节完成不同促发育系数对应的高度参数以及角度对应。最终使足弓部位的形态形成流畅过度的山坡状曲面形态。完成基底层足弓支撑部分的设计。
44.在足跟跟杯部分,呈椭球形凹陷形态且具有超过4mm(基底跟杯部分最靠后端的最高点至基底跟杯部分顶面最低点距离)以上的跟沿包裹。能够有利于足跟形态或位置的定位及矫正。调节跟杯部分,最外侧所布轮廓控制点,完成符合上述参数特征基底层足跟跟杯部分的设计。
45.不同的身高体重对应不同的舒适度,则对应不同的基底层内部填充密度。鞋垫基底层足弓支撑部分内部填充结构为非致密填充,镂空结构,能够为鞋垫提供支撑的同时也兼具了缓震效果。例如正六边形蜂窝状孔洞结构或十字线性交叉结构等。通过大量样本的主观及客观性舒适度实验。在体重区间在10-12.5kg,12.5-15kg,15-17.5kg,17.5-20kg的
儿童体重人群中,其对应能够保证支撑强度及30万以上抗压次数的打印填充密度区间为5%-20%,基底层内部填充结构包括正六边形,十字线性交叉等多种结构。通过用户的体重确定其落入的体重区间,判定该体重对应的打印密度以及内部填充结构。完成3d打印文件的制作。利用相关3d打印技术进行鞋垫基底层的制作。
46.根据上述里鞋垫的轮廓线向外侧进行大于2mm的偏移,并进行打印,利用打印轮廓进行鞋垫中部缓冲层以及与足部接触的面材进行裁剪制备,最终将打印完成的基底层,中部夹层以及顶部面层进行组装贴合。并进行质检最终完成促发育鞋垫的定制制备。
47.尽管参照前述实施例对本发明进行了详细的说明,对于本领域的技术人员来说,其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分技术特征进行等同替换,凡在本发明的精神和原则之内,所做的任何修改、等同替换、改进等,均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1