安全帽、异物检测方法、电子产品及计算机可读存储介质与流程
本技术涉及安全防护领域,尤其是涉及一种安全帽、异物检测方法、电子产品及计算机可读存储介质。
背景技术:
1、随着港口物流需求的高速增长,岸桥吊装集装箱进行装卸作业时,现场必须有指挥手进行指挥和确认工作。且指挥手因为工作内容需要频繁低头或弯腰进行操作,无法实时抬头观察头顶上方集装箱位置,一旦指挥手上方出现异物坠落,指挥手来不及闪避就很容易出现人伤事故。
2、安全帽作为指挥手必不可少的一种安全保护装置,主要用于作业人员受到高处坠落物、硬质物体的冲击或挤压时,减少对头部的冲击力,对于指挥手在工作场景中可能遇到的危险程度来说,这种防护模式起到的防护作用并不明显,也不能有效的减少安全事故发生。
3、带有检测作用的警示安全帽也无法为指挥手检测来自上方的异物状态,可见,目前警示安全帽不适用于指挥手的工作场景,无法在指挥手正常工作时警示来自上方的下坠异物以提供主动的防御保护。
技术实现思路
1、为了解决上述问题,本技术提供一种安全帽、异物检测方法、电子产品及计算机可读存储介质,以实时检测佩戴者上方的异物状态,在佩戴者存在风险时发出警示,为佩戴者提供主动的防御保护。
2、本技术的上述发明目的是通过以下技术方案得以实现的:
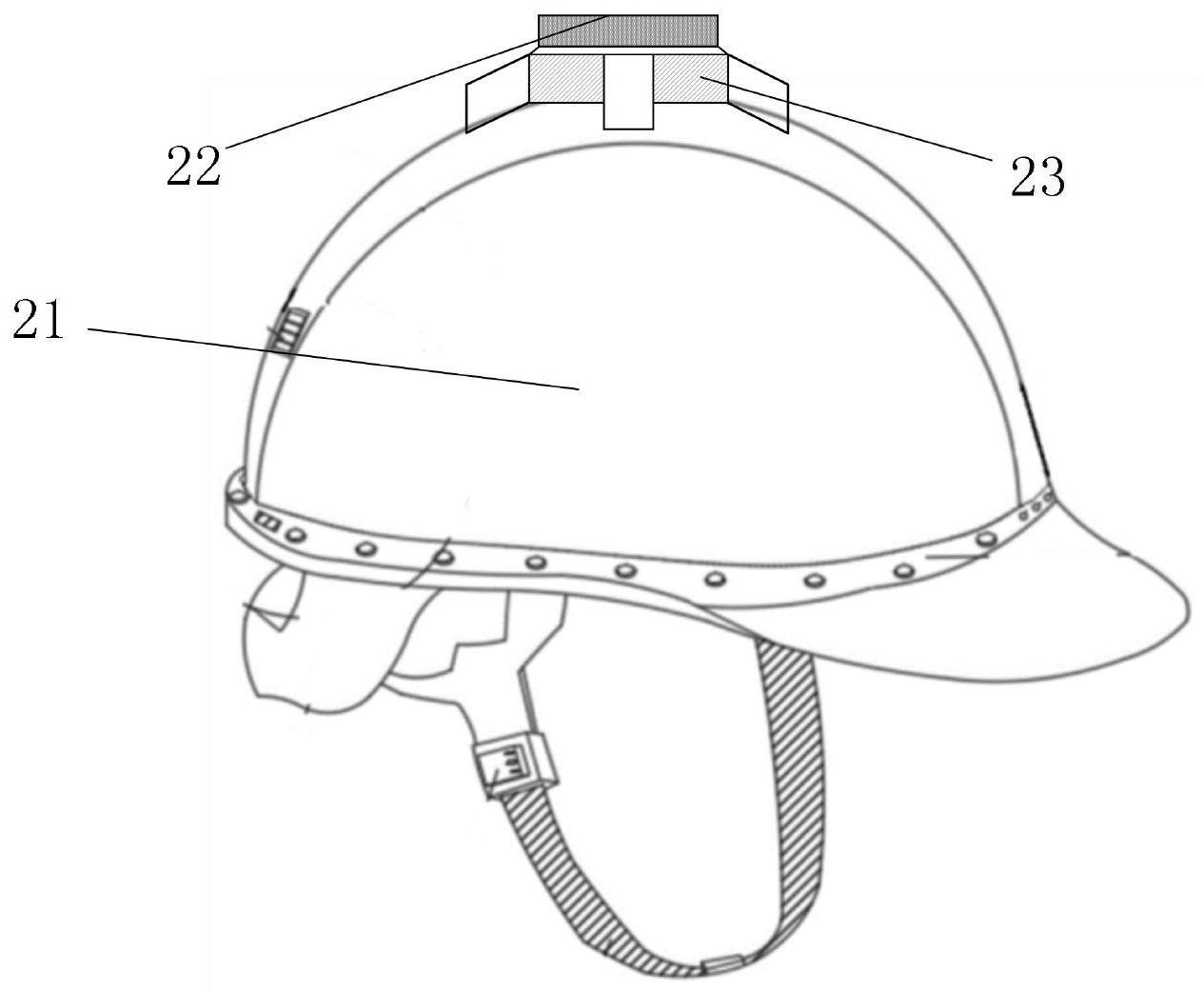
3、第一方面,本技术提供一种安全帽,包括:帽体、感应装置、监测装置、控制装置和报警装置;
4、所述感应装置固定设置在所述帽体的外表面,所述监测装置固定安装在感应装置上;
5、所述控制装置分别与所述感应装置、所述监测装置、所述报警装置连接;
6、所述感应装置用于检测所述感应装置的检测范围内的异物状态数据,并将所述异物状态数据发送给所述控制装置;
7、所述监测装置用于监测感应装置的倾斜状态数据,并将所述倾斜状态数据发送给所述控制装置;
8、所述控制装置用于根据所述倾斜状态数据和所述异物状态数据确定佩戴者竖直上方的异物的状态数据,基于所述佩戴者竖直上方的异物的状态数据进行风险判断,并根据判断结果确定是否发送报警信号给报警装置;
9、所述报警装置用于在获取到所述报警信号后发出警示。
10、通过本方案,监测装置实时监测调整感应装置的倾斜状态,控制装置根据倾斜状态数据和感应装置检测的异物状态数据确定佩戴者竖直上方的异物的状态数据,控制装置再通过对竖直上方的异物的状态数据进行风险判断,可以在佩戴者上方存在风险时对佩戴者发出必要的警示,起到了佩戴者在危险情况下的主动防御作用。同时,该安全帽可以在港口物流的指挥手正常作业不能观察上方危险状况时,起到很好的警示和保护作用,适用范围广。
11、可选的,所述感应装置包括固定设置在所述帽体的面阵测距雷达;
12、所述面阵测距雷达具有n*m个测距单元,所述测距单元用于按照预设检测频率检测对应的检测方向的异物距离数据,其中,任一所述测距单元对应的检测方向互不相同;
13、所述面阵测距雷达用于将所有所述测距单元检测的异物距离数据作为异物状态数据发送给所述控制装置;
14、所述控制装置根据所述倾斜状态数据和所有所述测距单元检测的异物距离数据确定佩戴者竖直上方的异物的距离,基于所述竖直上方的异物的距离进行风险判断,并根据判断结果确定是否发送报警信号给报警装置。
15、通过本方案,利用由多个测距单元组成的面阵测距雷达可以实现对一个区域范围性的检测,从而能够为控制装置分析佩戴者竖直上方的异物的状态的分析提供比较全面、精准的数据基础,提高安全帽的防护效果。
16、可选的,所述监测装置包括电子水平仪;
17、以所述电子水平仪重心为原点,以所述原点所在水平面建立x/y轴平面且x轴、y轴过原点,以垂直水平面且穿过所述原点为准建立z轴,所述x轴、y轴、z轴两两垂直,所述x轴、y轴、z轴构成空间直角坐标系;
18、所述电子水平仪用于监测所述感应装置在所述空间直角坐标系中基于x轴、y轴、z轴的倾斜角度,作为倾斜状态数据发送给所述控制装置;
19、所述控制装置在根据所述倾斜状态数据和所述异物状态数据确定佩戴者竖直上方的异物的状态数据时,具体用于:
20、处理所述倾斜角度,并根据处理结果和所述异物状态数据,确定佩戴者竖直上方的异物的状态数据。
21、通过本技术方案,利用电子水平仪可以高效的监测感应装置发生的倾斜偏转的详细数据,控制装置利用该数据则可以更加快速从感应装置提供的异物状态数据筛选出佩戴者竖直上方的异物的状态数据,提高安全帽的防护效果。
22、可选的,所述控制装置在处理所述倾斜角度时,具体用于:
23、应用卡尔曼滤波算法,根据当前时刻监测装置监测的倾斜角度和上一时刻应用卡尔曼滤波算法得出的预估倾斜角度,得到当前时刻预估的倾斜角度;
24、所述控制装置根据处理结果和所述异物状态数据,确定佩戴者竖直上方的异物的状态数据时,具体用于:
25、结合当前时刻预估的倾斜角度,判断所述异物状态数据中是否含有与z轴方向平行的异物的状态数据;
26、若含有,则将所述与z轴方向平行的异物的状态数据确定为佩戴者竖直上方的异物的状态数据;
27、若不含有,则根据所述异物状态数据中与z轴方向最接近的设定数量个异物的状态数据,计算得出与z轴方向平行的异物的状态数据,作为佩戴者竖直上方的异物的状态数据。
28、通过本方案,利用卡尔曼滤波算法可以减少在控制装置处理来自监测装置监测感应装置时测量误差对测量结果的影响,使控制装置获取到更为接近真实的倾斜角度以计算出佩戴者竖直上方的异物的状态数据,提高安全帽的防护效果。
29、可选的,所述控制装置在基于所述竖直上方的异物的距离进行风险判断,并根据判断结果确定是否发送报警信号给报警装置时,具体用于;
30、判断所述距离是否小于第一预设距离;
31、在确定所述距离小于第一预设距离后,确定预设时间段内各检测时刻对应的距离数据;
32、针对每一检测时刻,根据所述各检测时刻对应的距离数据,确定所述各检测时刻对应的速度数据;
33、根据所述预设时间段内各检测时刻对应的速度数据和各检测时刻对应的距离数据,确定所述佩戴者竖直上方的异物坠落到佩戴者位置的时间;
34、针对每一检测时刻,根据所述佩戴者竖直上方的异物坠落到佩戴者位置的时间和设定逃离时间,确定所述佩戴者竖直上方的异物的风险等级;
35、根据所述佩戴者竖直上方的异物的风险等级,发送对应的报警信号给报警装置。
36、通过本方案,控制装置可以将感应装置的检测数据处理后进行风险判断,根据不同的判断结果,确定向报警装置是否发出报警信号,为佩戴者的安全状态进行主动的分析并进行防护。
37、可选的,所述控制装置还用于:
38、在与所述电子水平仪通信中断超过第一设定时间时,发送故障报警信号给所述报警装置;和/或,
39、在所述电子水平仪处于非水平状态超过第二设定时间时,发送故障报警信号给所述报警装置。
40、通过本方案,利用控制装置对电子水平仪的自检可以有效的保证本技术的发明可以时刻处于工作的状态,在硬件出现故障的时候提醒佩戴者,以防佩戴者因硬件故障放松警惕发生事故。
41、第二方面,本技术提供一种异物检测方法,该方法包括:
42、所述感应装置检测所述感应装置的检测范围内异物状态数据,并将所述异物状态数据发送给所述控制装置;
43、所述监测装置监测所述感应装置的倾斜状态数据,并将所述倾斜状态数据发送给所述所述控制装置;
44、所述控制装置根据所述倾斜状态数据和所述异物状态数据确定佩戴者竖直上方的异物的状态数据;
45、所述控制装置根据所述佩戴者竖直上方的异物的状态数据进行风险判断,并根据判断结果确定是否发送风险报警信号给报警装置;
46、所述报警装置获取到所述报警信号后发出警示。
47、第三方面,本技术提供一种异物检测方法,应用于第一方面所述的安全帽中的控制装置,所述方法包括:
48、接收所述感应装置发送的异物状态数据,所述异物状态数据是所述感应装置检测所述感应装置的检测范围内的异物得到的;
49、接收所述监测装置发送的倾斜状态数据;所述倾斜状态数据是所述监测装置监测所述感应装置得到的;
50、处理所述倾斜状态数据和所述异物状态数据并根据结果确定佩戴者竖直上方的异物数据;
51、处理所述佩戴者竖直上方的异物数据以进行风险判断,并根据判断结果确定是否发送风险报警信号给报警装置,以使所述报警装置获取到所述报警信号后发出警示。
52、第四方面,本技术提供一种电子产品,包括:存储器和处理器,所述存储器上存储有能够被处理器加载并执行第三方面的方法的计算机程序。
53、第五方面,本技术提供一种计算机可读存储介质,存储有能够被处理器加载并执行第三方面的方法的计算机程序。
- 还没有人留言评论。精彩留言会获得点赞!