智能头盔的制作方法
1.本技术涉及穿戴设备领域,具体涉及一种智能头盔。
背景技术:
2.在通信行业中,勘探人员需要前往实际地点进行考察,以排布通信网络。遇到矿山、矿井等环境复杂的场景时,勘探人员无法看清前方环境,危险性较高。
3.近年来,随着智能头盔的应用越来越广泛,5g通信技术的普及更是带动了智能穿戴设备的应用,特别是在环境复杂的场景中,智能头盔具有较高的实用价值,勘探人员可以通过佩戴智能头盔与外界通信连接,从而通过网络连接实时了解周围的环境情况。
4.然而,现有的智能头盔过于依赖通信网络。由于矿山或矿井具有较大的深度,有线连接的智能头盔经常会出现线路损坏的情况,而无线通信的智能头盔,其信号则会受到各种屏蔽而导致中断,网络的可靠性较低。井下的勘探人员与外界的通信信号发生中断会导致勘探人员无法提前了解周围环境,危险发生时无法即使应对,从而影响人身安全。
技术实现要素:
5.本技术提供一种智能头盔,可以解决勘探人员无法了解周围环境影响人身安全的问题。
6.本技术提供一种智能头盔,其包括:
7.盔体;
8.信号处理单元,设置于盔体的内部;
9.激光雷达装置,激光雷达装置与信号处理单元通信连接,激光雷达装置包括相连接的激光器和旋转装置,旋转装置设置于盔体的内部,旋转装置驱动激光器旋转,激光器包括激光发射单元和激光接收单元,激光发射单元和激光接收单元设置于盔体的外部。
10.在一些可实现的方式中,旋转装置包括相连接的驱动件和旋转组件,旋转组件与激光器相连,驱动件驱动旋转组件旋转,以使激光器旋转。
11.在一些可实现的方式中,旋转组件包括齿轮和环形齿条,驱动件与齿轮连接,环形齿条与激光器连接,驱动件驱动齿轮旋转,以使环形齿条带动激光器旋转。
12.在一些可实现的方式中,智能头盔包括光线聚焦部件,旋转组件包括旋转圆盘,激光器设置于旋转圆盘的上表面,光线聚焦部件设置于旋转圆盘的上表面,并且光线聚焦部件位于激光器的前端。
13.在一些可实现的方式中,光线聚焦部件包括聚焦透镜,聚焦透镜位于激光器的前端。
14.在一些可实现的方式中,智能头盔包括护目镜,护目镜与盔体连接,护目镜设置于盔体的前端。
15.在一些可实现的方式中,护目镜为透明结构。
16.在一些可实现的方式中,智能头盔还包括投影部件,投影部件设置于盔体内,投影
部件与信号处理单元通信连接,投影部件的投影端面向护目镜设置。
17.在一些可实现的方式中,智能头盔包括缓冲层,缓冲层设置于盔体的内壁。
18.在一些可实现的方式中,旋转装置设置于缓冲层。
19.本技术提供的智能头盔,激光雷达装置以激光作为信号源,由激光发射单元发射出的脉冲激光,经障碍物反射后,引起散射,一部分光波被激光接收单元收集。信号处理单元通过测量反射光线的运行时间可以确定激光雷达装置与障碍物之间的距离。脉冲激光不断地扫描障碍物,就可以得到障碍物上全部目标点的数据,根据此数据进行成像处理,即可得到精确的图像。
20.工作人员通过佩戴智能头盔可以获取周围环境的信息。勘探人员可以对障碍物的位置信息及内部环境进行预判,从而可以及时应对危险情况,降低勘探人员被障碍物碰伤、划伤的可能性,进而降低安全隐患。
21.激光发射单元和激光接收单元可以设置于盔体的顶部,使得勘探人员佩戴智能头盔工作时,勘探人员不需要手持激光器并旋转以进行勘探工作,从而方便勘探人员的工作。激光器的激光发射单元和激光接收单元可以外露于盔体,从而激光器可以对周围的环境进行扫描。
22.由于旋转装置可以驱动激光器旋转,因此激光器的激光发射单元和激光接收单元可以同步旋转,以实现对所在平面的扫描,从而产生实时的平面图信息。因此,勘探人员佩戴智能头盔工作时,不需要转动身体或者头盔以调节激光器的旋转角度就能对周围的环境进行扫描,从而为勘探人员的工作提供便利,有利于提高勘探人员的工作效率。
附图说明
23.此处的附图被并入说明书中并构成本说明书的一部分,示出了符合本技术的实施例,并与说明书一起用于解释本技术的原理。
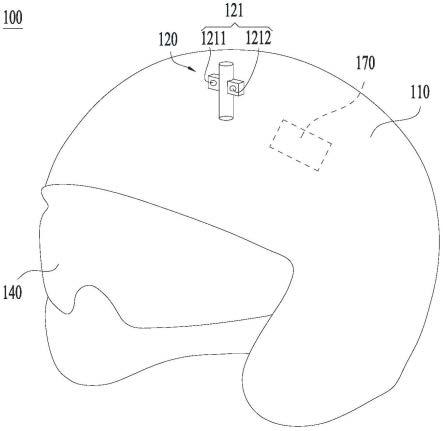
24.图1为本技术一实施例的智能头盔的结构示意图;
25.图2为本技术一实施例的智能头盔的局部剖视结构示意图;
26.图3为本技术另一实施例的智能头盔的局部剖视结构示意图;
27.图4为本技术另一实施例的智能头盔的结构示意图。
28.附图标记说明:
29.100、智能头盔;
30.110、盔体;110a、避让孔;
31.120、激光雷达装置;
32.121、激光器;1211、激光发射单元;1212、激光接收单元;
33.122、旋转装置;1221、驱动件;1222、旋转组件;12221、齿轮;12222、环形齿条;12223、旋转圆盘;12224、连接轴;12225、支架;
34.130、光线聚焦部件;
35.140、护目镜;
36.150、缓冲层;
37.160、投影部件;
38.170、信号处理单元。
39.通过上述附图,已示出本技术明确的实施例,后文中将有更详细的描述。这些附图和文字描述并不是为了通过任何方式限制本技术构思的范围,而是通过参考特定实施例为本领域技术人员说明本技术的概念。
具体实施方式
40.这里将详细地对示例性实施例进行说明,其示例表示在附图中。下面的描述涉及附图时,除非另有表示,不同附图中的相同数字表示相同或相似的要素。以下示例性实施例中所描述的实施方式并不代表与本技术相一致的所有实施方式。相反,它们仅是与如所附权利要求书中所详述的、本技术的一些方面相一致的装置和方法的例子。
41.本技术的智能头盔100可以应用于通信行业,也可应用于通信行业以外的任意领域。例如,建筑工程、消防救援等领域。本技术的智能头盔100对应用领域不作限定。
42.以通信行业为例,勘探人员需要对实际环境进行考察以合理的排布通信网络。当遇到矿山、矿井等环境复杂的场景,内部光线较弱,勘探人员无法看清前方的环境,则无法及时应对危险状况,不利于保护自身安全。
43.现有技术中,智能头盔可以通过5g通信技术与外界进行通信连接,从而获取矿山、矿井等内部环境的信息。然而,申请人发现,由于矿山或矿井的深度很深,内部光线较弱,有线连接的智能头盔经常会出现线路损坏的情况,而无线通信的智能头盔,其信号则会受到各种屏蔽而导致中断,因此对于环境复杂的场景,网络的可靠性较低,井下的勘探人员与外界的通信信号发生中断会导致勘探人员无法提前了解周围环境,危险发生时无法即使应对,从而影响人身安全。
44.基于上述问题,申请人对智能头盔100的结构进行改进,下面对本技术实施例进行进一步描述。
45.参见图1所示,本技术实施例的智能头盔100包括盔体110、信号处理单元170 和激光雷达装置120。信号处理单元170设置于盔体110的内部。激光雷达装置120 与信号处理单元170通信连接。激光雷达装置120包括相连接的激光器121和旋转装置122。旋转装置122设置于盔体110的内部。旋转装置122驱动激光器121旋转。激光器121包括激光发射单元1211和激光接收单元1212。激光发射单元1211和激光接收单元1212设置于盔体110的外部。
46.本技术实施例的激光雷达装置120的工作原理如下,激光雷达装置120以激光作为信号源,由激光器121的激光发射单元1211发射出的脉冲激光,经障碍物反射后,引起散射,一部分光波被激光器121的激光接收单元1212收集。信号处理单元170通过测量反射光线的运行时间可以确定激光雷达装置120与障碍物之间的距离。脉冲激光不断地扫描障碍物,并获得障碍物上全部目标点的数据,信号处理单元170可以根据这些数据进行成像处理,从而可以生成精确的图像。
47.综上,工作人员通过佩戴智能头盔100可以获取周围环境的信息。勘探人员可以对障碍物的位置信息及内部环境进行预判,从而可以及时应对危险情况,降低勘探人员被障碍物碰伤、划伤的可能性,进而降低安全隐患。
48.激光发射单元1211和激光接收单元1212可以设置于盔体110的顶部,使得勘探人员佩戴智能头盔100工作时,勘探人员不需要手持激光器121并旋转以进行勘探工作,从而方便勘探人员的工作。激光器121的激光发射单元1211和激光接收单元1212可以外露于盔
体110,从而激光器121可以对周围的环境进行扫描。
49.在一些示例中,参见图2所示,盔体110的顶部设置有避让孔110a。激光发射单元1211和激光接收单元1212位于避让孔110a的外侧,以外露于盔体110的外部。
50.由于旋转装置122可以驱动激光器121旋转,因此激光器121的激光发射单元 1211和激光接收单元1212可以同步旋转,以实现对所在平面的扫描,从而产生实时的平面图信息。因此,勘探人员佩戴智能头盔100工作时,不需要转动身体或者盔体110以调节激光器121的旋转角度就能对周围的环境进行扫描,从而为勘探人员的工作提供便利,有利于提高勘探人员的工作效率。
51.勘探人员佩戴智能头盔100工作时,勘探人员的头部可以位于盔体110的内部。根据人体头部的轮廓,盔体110的外表面可以为球面。盔体110可以保护勘探人员的安全,降低勘探人员的头部被重物砸伤的可能性。盔体110可以由强度较高的材料制成。示例性地,盔体110的材料可以为abs塑料(acrylonitrilebutadiene styrene plastic)、玻璃纤维或碳纤维中的至少一种。
52.在一些示例中,盔体110可以为半盔体110。盔体110的后部可以向下延伸至勘探人员的颈部。勘探人员佩戴智能头盔100后,脸部可以通过盔体110的前端外露,以方便勘探人员呼吸、沟通或者饮水。
53.在一些可实现的方式,参见图2所示,本技术实施例的旋转装置122包括相连接的驱动件1221和旋转组件1222。旋转组件1222与激光器121相连。驱动件 1221驱动旋转组件1222旋转,以使激光器121旋转。
54.在一些示例中,驱动件1221可以为旋转组件1222提供驱动力。示例性地,驱动件1221可以为伺服电机。伺服电机可以控制旋转组件1222的旋转速度,并且具有较高的位置精度。因此,伺服电机可以为激光器121提供稳定的旋转速度,以提高激光发射单元1211发射激光以及激光接收单元1212接收反射光线的稳定性,从而有利于提高信号处理单元170计算与障碍物之间的距离以及生成实时平面图的精确度。
55.在一些可实现的方式中,参见图2所示,本技术实施例的旋转组件1222包括齿轮12221和环形齿条12222。驱动件1221与齿轮12221连接。环形齿条12222与激光器121连接。驱动件1221驱动齿轮12221旋转,以使环形齿条12222带动激光器121旋转。
56.环形齿条12222与齿轮12221啮合传动。驱动件1221可以驱动齿轮12221转动。因此齿轮12221转动时,环形齿条12222与齿轮12221啮合,同时环形齿条 12222旋转。环形齿条12222与激光器121连接,从而环形齿条12222可以带动激光器121一起发生旋转,以实现激光器121对周围环境进行扫描。
57.在一些示例中,旋转组件1222还包括连接轴12224。连接轴12224设置于旋转圆盘12223与环形齿条12222之间。连接轴12224用于连接旋转圆盘12223与环形齿条12222。连接轴12224与旋转圆盘12223均设置于盔体110的内部。齿轮 12221转动时,环形齿条12222发生旋转。环形齿条12222通过连接轴12224带动旋转圆盘12223旋转,从而旋转圆盘12223上的激光器121也发生旋转。
58.示例性地,连接轴12224可以与旋转圆盘12223面向环形齿条12222的端面焊接。连接轴12224通过多个连接杆与环形齿条12222相连。多个连接杆环绕连接轴12224均匀间隔设置。
59.在一些示例中,旋转组件1222还包括支架12225。支架12225可以设置于旋转圆盘12223的上表面。激光发射单元1211和激光接收单元1212均固定于支架 12225上,并且分别位于支架12225的两侧。支架12225可以穿过盔体110的避让孔110a,以使激光发射单元1211和激光接收单元1212可以位于盔体110的外部。
60.支架12225可以转动连接于盔体110。示例性地,支架12225与盔体110之间可以设置轴承。支架12225与轴承的内圈连接。轴承的外圈与盔体110相连。轴承可以降低支架12225旋转过程中的摩擦系数,以降低支架12225旋转出现卡滞现象的可能性,提高支架12225旋转过程中的稳定性,并且轴承具有较高的回转精度,从而激光器121可以为信号处理单元170提供精确的信息。
61.在一些可实现的方式中,参见图3所示,本技术实施例的智能头盔100包括光线聚焦部件130。旋转组件1222包括旋转圆盘12223。激光器121设置于旋转圆盘12223的上表面。光线聚焦部件130设置于旋转圆盘12223的上表面,并且光线聚焦部件130位于激光器121的前端。
62.激光发射单元1211发射的激光照射到障碍物后会产生不同方向的反射光线。光线聚焦部件130可以汇聚不同方向的反射光线并传递至激光接收单元 1212,从而为信号处理单元170提供充足且准确的数据,进而可以提高激光雷达装置120探测结果的精确度。
63.激光器121的激光发射单元1211和激光接收单元1212可以外露于盔体110。光线聚焦部件130可以设置于激光器121的激光接收单元1212的前端。激光发射单元1211发射的激光照射到障碍物后产生的反射光线可以穿过光线聚焦部件 130,并传递至激光接收单元1212。
64.在一些示例中,由于激光器121可以设置于旋转组件1222的旋转圆盘12223 上,因此光线聚焦部件130也可以设置于旋转圆盘12223,以提高激光器121的激光接收单元1212与光线聚焦部件130之间的稳定性以及运动同步性。
65.驱动件1221驱动齿轮12221转动时,环形齿条12222发生旋转。环形齿条 12222通过连接轴12224带动旋转圆盘12223旋转,从而旋转圆盘12223上的激光器121和光线聚焦部件130也发生旋转。
66.旋转组件1222的旋转圆盘12223可以与盔体110转动连接。示例性地,旋转圆盘12223与盔体110之间可以设置轴承。旋转圆盘12223与轴承的内圈连接。轴承的外圈与盔体110相连。轴承可以降低支架12225旋转过程中的摩擦系数,以降低旋转圆盘12223的旋转出现卡滞现象的可能性,提高旋转圆盘12223旋转过程中的稳定性,并且轴承具有较高的回转精度,从而激光器121可以为信号处理单元170提供精确的信息。
67.在一些可实现的方式中,参见图3所示,本技术实施例的光线聚焦部件130 包括聚焦透镜。聚焦透镜位于激光器121的前端。
68.在一些示例中,聚焦透镜可以为凸透镜。凸透镜的边缘薄中间厚,因此穿过凸透镜的一面进入凸透镜内部的光线都会向凸透镜的另一面的中间区域偏距,最终在凸透镜的中垂线上的一点处相聚,以汇聚不同方向的反射光线,并传递至激光接收单元1212,从而为信号处理单元170提供充足、稳定、精确的信息。
69.在一些可实现的方式中,参见图1和图4所示,本技术实施例的智能头盔100 包括护目镜140。护目镜140与盔体110连接。护目镜140设置于盔体110的前端。
70.护目镜140与盔体110连接,可以降低护目镜140与盔体110分离导致护目镜 140遗失或损坏的可能性。此外,护目镜140可以具有较好的硬度,以降低外部尖锐物体刺穿护目镜140导致眼部受伤的可能性,从而可以更好的保护勘探人员的眼部安全。
71.在一些示例中,护目镜140的外表面呈圆弧形。护目镜140的外表面与盔体 110的前表面相匹配,使得护目镜140处于放下的状态时,盔体110的表面与护目镜140的外表面之间光滑过渡,从而可以提高智能头盔100的美观性。
72.在一些示例中,护目镜140可以包括鼻托。由于护目镜140与盔体110相连,因此鼻托可以支撑盔体110,同时也可以使护目镜140与勘探人员的脸部贴合紧密,从而降低智能头盔100晃动导致护目镜140的位置发生偏移,影响勘探人员的视线,降低勘探效率的可能性。
73.在一些可实现的方式中,护目镜140为透明结构。勘探人员可以透过护目镜 140观察周围的环境。由于勘探环境多为光线不好的矿山或者矿井区域,透明结构的护目镜140可以保证勘探人员观察周围环境的清晰度,降低因护目镜140不清晰的原因导致勘探人员无法看清周围环境,危险发生时无法即使应对,影响勘探人员的人身安全的可能性。
74.在一些示例中,护目镜140的材料可以为玻璃或者树脂。示例性地,护目镜 140的材料可以为无色的玻璃,以降低周围物体透过彩色玻璃后颜色发生变化,混淆勘探人员的视线,影响勘探人员对周围环境的判断。
75.在一些可实现的方式中,参见图4所示,本技术实施例的智能头盔100还包括投影部件160。投影部件160设置于盔体110内。投影部件160与信号处理单元170通信连接,投影部件160的投影端面向护目镜140设置。
76.在一些示例中,投影部件160可以将信号处理单元170传递的图像信息投影于护目镜140的内表面。护目镜140上可以显示图像信息。勘探人员佩戴智能头盔100后,可以通过护目镜140显示的平面图像直观、具体地了解周围的环境,从而降低勘探人员无法观察周围的环境影响人身安全的可能性。
77.在一些可实现的方式中,参见图3所示,本技术实施例的智能头盔100包括缓冲层150。缓冲层150设置于盔体110的内壁。
78.缓冲层150设置于盔体110与勘探人员的头部之间。勘探人员佩戴智能头盔100后,头部可以与缓冲层150直接接触。缓冲层150主要用于缓冲外来撞击的冲击力。
79.由于盔体110较坚硬,当盔体110遇到外部的冲击力时,冲击力如果通过坚硬的盔体110直接作用于勘探人员的头部,容易导致头部受到伤害。因此,缓冲层150可以缓解、分散冲击力,可以有效消散盔体110受到的冲击力,降低勘探人员头部受伤的可能性。
80.在一些示例中,缓冲层150可以包裹勘探人员的脑部前端、脑部顶端以及脑部后端,以使勘探人员的脑部可以得到充分的保护,同时,勘探人员的脑部不会直接与较坚硬的盔体110直接接触,从而可以提高勘探人员佩戴智能头盔100 的舒适感。
81.在一些示例中,缓冲层150具有较好的耐冲击性和避震效果。示例性地,缓冲层150的材料可以包括聚苯乙烯树脂。
82.在一些可实现的方式中,参见图3所示,本技术实施例的旋转装置122设置于缓冲层150。
83.在一些示例中,缓冲层150的部分区域可以不与盔体110的内壁相连,以使缓冲层
150的部分区域可以与盔体110的内壁之间形成空腔。旋转装置122可以设置于空腔内。旋转装置122可以位于缓冲层150与盔体110的内壁之间。旋转装置 122的驱动件1221可以与缓冲层150相连。
84.由于旋转装置122位于盔体110的内部,盔体110可以保护旋转装置122,以降低旋转装置122受到碰撞无法运转,导致激光器121无法旋转,影响勘探人员的工作效率的可能性。
85.在本技术实施例的描述中,需要说明的是,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应作广义理解,例如,可以是固定连接,也可以是通过中间媒介间接相连,可以是两个元件内部的连通或者两个元件的相互作用关系。对于本领域的普通技术人员而言,可以根据具体情况理解上述术语在本技术实施例中的具体含义。
86.在本技术实施例或者暗示所指的装置或者元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本技术实施例的限制。在本技术实施例的描述中,“多个”的含义是两个或两个以上,除非是另有精确具体地规定。
87.本技术实施例的说明书和权利要求书及上述附图中的术语“第一”、“第二”、“第三”、“第四”等(如果存在)是用于区别类似的对象,而不必用于描述特定的顺序或先后次序。应该理解这样使用的数据在适当情况下可以互换,以便这里描述的本技术实施例例如能够以除了在这里图示或描述的那些以外的顺序实施。
88.此外,术语“包括”和“具有”以及他们的任何变形,意图在于覆盖不排他的包含,例如,包含了一系列步骤或单元的过程、方法、系统、产品或设备不必限于清楚地列出的那些步骤或单元,而是可包括没有清楚地列出的或对于这些过程、方法、产品或设备固有的其它步骤或单元。
89.本文中的术语“多个”是指两个或两个以上。本文中术语“和/或”,仅仅是一种描述关联对象的关联关系,表示可以存在三种关系,例如,a和/或b,可以表示:单独存在a,同时存在a和b,单独存在b这三种情况。另外,本文中字符“/”,一般表示前后关联对象是一种“或”的关系;在公式中,字符“/”,表示前后关联对象是一种“相除”的关系。
90.可以理解的是,在本技术的实施例中涉及的各种数字编号仅为描述方便进行的区分,并不用来限制本技术的实施例的范围。
91.可以理解的是,在本技术的实施例中,上述各过程的序号的大小并不意味着执行顺序的先后,各过程的执行顺序应以其功能和内在逻辑确定,而不应对本技术的实施例的实施过程构成任何限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1