磁共振成像方法及系统,非暂态计算机可读存储介质与流程
1.本发明涉及医学成像技术,更具体地涉及一种磁共振成像方法及系统,以及非暂态计算机可读存储介质。
背景技术:
2.磁共振成像(mri)作为一种医学成像模态,可以在不使用x射线或其他电离辐射的情况下获得人体的图像。mri利用具有强磁场的磁体来产生静磁场b0。当将人体的待成像部位定位于静磁场b0中时,与人体组织中的氢原子核相关联的核自旋产生极化,从而待成像部位的组织在宏观上产生纵向磁化矢量。当施加与静磁场b0的方向相交的射频场b1后,质子旋转的方向发生改变,从而待成像部位的组织在宏观上产生横向磁化矢量。移除射频场b1后,横向磁化矢量以螺旋状进行衰减直至恢复为零,衰减的过程中产生自由感应衰减信号,该自由感应衰减信号能够作为磁共振信号被采集,并基于采集的该信号可以重建待成像部位的组织图像。梯度系统用于发射层面选择梯度脉冲、相位编码梯度脉冲以及频率编码梯度脉冲(也称读出梯度脉冲)以对上述磁共振信号提供三维位置信息,以实现图像重建。
3.通常地,梯度系统包括谐振电源、梯度放大器以及梯度线圈,谐振电源给梯度放大器提供电源,而梯度放大器通常设置为桥式以被配置为向梯度线圈供应期望的电流和电压。
4.弥散加权成像(diffusion weighted imaging,dwi)是一种新的磁共振成像方法,其在医疗诊断领域中已得到了越来越广泛的应用。由于在弥散加权成像中,需要在选层梯度、相位梯度以及频率(或读出)梯度中的至少一者上,施加扩散梯度(diffusion gradient)脉冲序列,该脉冲序列中包括两个施加在梯度磁场线圈上的运动探测梯度(motion probing gradient,mpg)脉冲,这两个mpg脉冲宽度和幅度较大,而且两次脉冲之间的间隔时间也会比较短,这就造成为梯度线圈供应电压(和/或电流)的梯度放大器需要提供一个方向(例如正向或负向)的电流,因此,会导致桥式电路中的某两个开关单元(例如晶体管单元)会长时间导通,该开关单元也会有较重的负载,而且长时间的导通也会大大的缩短其寿命,这也就导致不均衡的功率损耗。
技术实现要素:
5.本发明提供一种磁共振成像方法及系统,以及非暂态计算机可读存储介质。
6.本发明的示例性实施例提供了一种磁共振成像方法,所述方法包括执行成像扫描序列,所述序列包括运动探测梯度,其中,在执行所述序列时,当被检测对象信息与前次扫描相比发生改变,或累积时间达到阈值时,改变所述运动探测梯度的脉冲方向。
7.具体地,所述累积时间包括所述运动探测梯度的脉冲方向发生改变前的扫描累积时间。
8.具体地,所述累积时间包括磁共振成像系统的扫描累积时间。
9.具体地,所述被检测对象信息包括被检测对象的体重信息。
10.具体地,所述方法进一步包括保存改变后的运动探测梯度的脉冲方向,并计算采用所述改变的运动探测梯度的脉冲方向的扫描累积时间。
11.具体地,所述方法进一步包括在所述序列的激发脉冲到信号采集脉冲时间段内,施加梯度脉冲,且所述梯度脉冲的方向与所述改变的运动探测梯度脉冲方向一致。
12.本发明的示例性实施例还提供了一种非暂态计算机可读存储介质,其用于存储计算机程序,所述计算机程序由计算机执行时使计算机执行上述的用于磁共振成像方法的指令。
13.本发明的示例性实施例还提供了一种磁共振成像系统,所述系统包括控制模块。所述控制模块被配置用于执行成像扫描序列,所述序列包括运动探测梯度,其中,在执行所述序列时,当被检测对象信息与前次扫描相比发生改变,或累积时间达到阈值时,改变所述运动探测梯度的脉冲方向。
14.具体地,所述累积时间包括所述运动探测梯度的脉冲方向发生改变前的扫描累积时间。
15.具体地,所述累积时间包括磁共振成像系统的扫描累积时间。
16.具体地,所述被检测对象信息包括被检测对象的体重信息。
17.具体地,所述控制模块进一步被配置用于保存改变后的运动探测梯度的脉冲方向,并计算采用所述改变的运动探测梯度的脉冲方向的扫描累积时间。
18.具体地,所述控制模块进一步被配置用于在所述序列的激发脉冲到信号采集脉冲时间段内,施加梯度脉冲,且所述梯度脉冲的方向与所述改变的运动探测梯度脉冲方向一致。
19.通过下面的详细描述、附图以及权利要求,其他特征和方面会变得清楚。
附图说明
20.通过结合附图对于本发明的示例性实施例进行描述,可以更好地理解本发明,在附图中:
21.图1是根据本发明一些实施例的磁共振成像系统的示意图;
22.图2是根据图1所示的磁共振成像系统进行扫描的脉冲序列示意图;
23.图3是根据图1所示的磁共振成像系统中的梯度系统的示意图;
24.图4是根据图3所示的梯度系统中的梯度放大器的示意图;
25.图5是根据本发明一些实施例的磁共振成像方法的流程图;
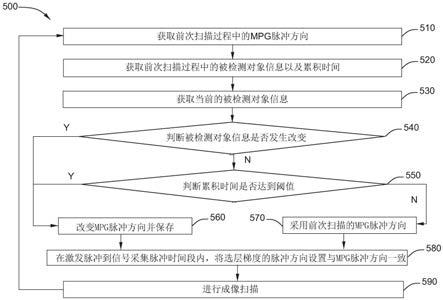
26.图6是根据图5所示方法的具体流程图;
27.图7是根据本发明一些实施例的的磁共振成像方法的脉冲序列示意图;
28.图8是采用第一扫描参数且mpg的脉冲方向为正时所得的医学图像;
29.图9是采用第一扫描参数且mpg的脉冲方向为负时所得的医学图像;
30.图10是采用第二扫描参数且mpg的脉冲方向为正时所得的医学图像;以及
31.图11是采用第二扫描参数且mpg的脉冲方向为负时所得的医学图像。
具体实施方式
32.以下将描述本发明的具体实施方式,需要指出的是,在这些实施方式的具体描述过程中,为了进行简明扼要的描述,本说明书不可能对实际的实施方式的所有特征均作详尽的描述。应当可以理解的是,在任意一种实施方式的实际实施过程中,正如在任意一个工程项目或者设计项目的过程中,为了实现开发者的具体目标,为了满足系统相关的或者商业相关的限制,常常会做出各种各样的具体决策,而这也会从一种实施方式到另一种实施方式之间发生改变。此外,还可以理解的是,虽然这种开发过程中所作出的努力可能是复杂并且冗长的,然而对于与本发明公开的内容相关的本领域的普通技术人员而言,在本公开揭露的技术内容的基础上进行的一些设计,制造或者生产等变更只是常规的技术手段,不应当理解为本公开的内容不充分。
33.除非另作定义,权利要求书和说明书中使用的技术术语或者科学术语应当为本发明所属技术领域内具有一般技能的人士所理解的通常意义。本发明专利申请说明书以及权利要求书中使用的“第一”、“第二”以及类似的词语并不表示任何顺序、数量或者重要性,而只是用来区分不同的组成部分。“一个”或者“一”等类似词语并不表示数量限制,而是表示存在至少一个。“包括”或者“包含”等类似的词语意指出现在“包括”或者“包含”前面的元件或者物件涵盖出现在“包括”或者“包含”后面列举的元件或者物件及其等同元件,并不排除其他元件或者物件。“连接”或者“相连”等类似的词语并非限定于物理的或者机械的连接,也不限于是直接的还是间接的连接。
34.图1示出了根据本发明一些实施例中的mri系统100的示意图。如图1所示,mri系统100包括扫描仪110、控制器单元120和数据处理单元130。上述mri系统100仅作为一个示例进行描述,在其它实施例中,该mri系统100可以具有多种变换形式,只要能够从被检测对象采集图像数据即可。
35.扫描仪110可以用于获取被检测对象116的数据,控制器单元120耦合至扫描仪110,以用于控制扫描仪110的操作。扫描仪110可以包括主磁体111、射频发射线圈112、射频发生器113、梯度线圈系统117、梯度线圈驱动器118以及射频接收线圈119。
36.主磁体111通常包括例如环形超导磁体,该环形超导磁体安装在环形的真空容器内。该环形超导磁体限定了环绕被检测对象116的圆柱形的空间。并沿圆柱形空间的z方向生成恒定的静磁场,如静磁场b0。mri系统100利用所形成的静磁场b0将静磁脉冲信号发射至放置在成像空间中的被检测对象116,使得被检测对象116体内的质子的进动有序化,产生纵向磁化矢量。
37.射频发生器113用于产生射频脉冲,射频脉冲可以包括射频激发脉冲,该射频激发脉冲经(例如射频功率放大器(未示出))放大后施加至射频发射线圈112,使得射频发射线圈112向被检测对象116发射正交于静磁场b0的射频磁场b1以激发被检测对象116体内的原子核,纵向磁化矢量转变为横向磁化矢量。当射频激发脉冲结束后,被检测对象116的横向磁化矢量逐渐恢复为零的过程中产生自由感应衰减信号,即能够被采集的磁共振信号。
38.射频发射线圈112可以为体线圈,该体线圈可以连接发射/接收(t/r)开关(未示出),通过控制该发射/接收开关可以使得体线圈在发射和接收模式进行切换,在该接收模式时,体线圈可以用于接收来自被检测对象116的磁共振信号。
39.梯度线圈系统117在成像空间中形成梯度磁场以便为上述磁共振信号提供三维位
置信息。该磁共振信号可以由射频接收线圈119或者接收模式下的体线圈所接收,数据处理单元130可以对接收到的磁共振信号进行处理以获得需要的图像或图像数据。
40.具体地,梯度线圈系统117可以包括三个梯度线圈,三个梯度线圈中的每一个生成倾斜到互相垂直的三个空间轴(例如x轴、y轴和z轴)之一中的梯度磁场,并且根据成像条件在切片选择方向、相位编码方向和频率编码方向中的每一个上生成梯度场。更具体地,梯度线圈系统117在被检测对象116的切片选择方向上施加梯度场以便选择切片;并且射频发射线圈112将射频激发脉冲发射至被检测对象116的所选的切片并激发该切片。梯度线圈系统117也在被检测对象116的相位编码方向上施加梯度场,以便对被激发的切片的磁共振信号进行相位编码。梯度线圈系统117随后在被检测对象116的频率编码方向上施加梯度场,以便对被激发的切片的磁共振信号进行频率编码。
41.梯度线圈驱动器118用于响应控制器单元120发出的序列控制信号为上述三个梯度线圈分别提供合适的功率信号。
42.扫描仪110还可以包括数据采集单元114,数据采集单元114用于采集由射频表面线圈119或者体线圈接收的磁共振信号,该数据采集单元114可以包括,例如射频前置放大器(未示出)、相位检测器(未示出)以及模拟/数字转化器(未示出),其中射频前置放大器用于对射频表面线圈119或者体线圈接收的磁共振信号进行放大,相位检测器用于对放大后的磁共振信号进行相位检测,模拟/数字转换器用于将经相位检测的磁共振信号从模拟信号转换为数字信号。上述数字化的磁共振信号可以经由数据处理单元130进行运算、重建等处理,以获得医学图像。
43.数据处理单元130可以包括计算机和存储介质,在该存储介质上记录要由计算机执行的预定数据处理的程序。数据处理单元130可以连接至控制器单元120,并且基于从控制器单元120接收到的控制信号来执行数据处理。数据处理单元130也可以连接至数据采集单元114,以接收数据采集单元114输出的磁共振信号以便执行上述数据处理。
44.控制器单元120可以包括计算机和存储介质,该存储介质用于存储可以由计算机执行的程序,当计算机执行程序时,可以使扫描仪110的多个部件实施对应于上述成像序列的操作。还可以使数据处理单元130执行预定的数据处理。
45.控制器单元120和数据处理单元130的存储介质可以包括例如rom、软盘、硬盘、光盘、磁光盘、cd-rom、或非易失性存储卡。
46.控制器单元120可以被设置和/或布置成以不同的方式使用。例如,在一些实现中,可以使用单个控制器单元120;在其他实现中,多个控制器单元120被配置成一起(例如,基于分布式处理配置)或单独地工作,每个控制器单元120被配置成处理特定方面和/或功能,和/或处理用于生成仅用于特定的医学成像系统100的模型的数据。在一些实现中,控制器单元120可以是本地的(例如,与一个或多个磁共振成像系统100同地,例如在同一设施和/或同一局部网络内);在其他实现中,控制器单元120可以是远程的,因此只能经由远程连接(例如,经由因特网或其他可用的远程访问技术)来访问。在特定实现中,控制器单元120可以以类似云的方式配置,并且可以以与访问和使用其他基于云的系统的方式基本上相似的方式被访问和/或使用。
47.mri系统100还包括用于将被检测对象116放置于其上的检测床140。可以基于来自控制器单元120的控制信号通过移动检测床140将被检测对象116移入或移出成像空间。
48.mri系统100还包括连接至控制器单元120的操作控制台单元150,操作控制台单元150可以将获取的操作信号发送给控制器单元120,以控制例如检测床140、扫描仪110的上述各部件的工作状态。该操作信号可以包括,例如通过手动或自动方式选择的扫描协议、参数等、该扫描协议可以包括上述的成像序列,此外,操作控制台单元150可以将获取的操作信号发送给控制器单元120,以控制数据处理单元130以便获得期望的图像。
49.操作控制台单元150可以包括用户输入设备,诸如键盘、鼠标、语音激活控制器或任何其他适合的输入设备等操作者界面的某个形式,操作者可以通过用户输入设备来向控制器单元120输入操作信号/控制信号。
50.mri系统100还可以包括显示单元160,其可以连接操作控制台单元150以显示操作界面,还可以连接数据处理单元130以显示图像。
51.在某些实施例中,系统100可以经由一个或多个可配置的有线和/或无线网络,诸如互联网和/或虚拟专有网络,来连接至一个或多个显示单元、云网络、打印机、工作站和/或位于本地或远程的类似装置。
52.图2示出了根据图1所示的磁共振成像系统100进行扫描的脉冲序列。如图2所示,“rf”示出了由射频发射线圈112发射的rf脉冲序列,其中包括90
°
和180
°
的脉冲序列,“gs”示出了选层梯度的脉冲序列,“gr”示出了相位梯度的脉冲序列,“gp”示出了频率(读出)梯度的脉冲序列,“mpg”示出了运动探测梯度mpg的脉冲序列。
53.通常地,当发射90
°
的rf脉冲序列之后,将选层梯度脉冲gs应用于梯度线圈,以产生选层梯度磁场。
54.接着,在90
°
的rf脉冲序列的一个预定时间后,发射180
°
的rf脉冲序列,这时,将另一个选层梯度脉冲gs应用于梯度线圈,以产生选层梯度磁场,在180
°
rf脉冲之后,将正反交替的频率梯度脉冲gp应用于梯度线圈,以产生频率(读出)梯度磁场,且将预定的相位梯度脉冲gr应用于梯度线圈,以产生相位梯度磁场。
55.本领域技术人员应该理解,图2仅示出了各种脉冲序列的一个实例,在实际扫描过程中,基于不同的扫描协议会有各种不同的脉冲序列形式。
56.此外,磁共振成像系统在180
°
的rf脉冲序列之前和之后应用一对扩散加权的梯度mpg(运动探测梯度)脉冲作为扩散加权的梯度磁场,以便分散扩散的质子来避免产生信号。扩散加权的梯度磁场可以应用到选层、频率、相位梯度中的至少一个上。通常地,施加在至少一个梯度轴的mpg脉冲幅度较大且两次脉冲之间的间隔时间也较短。
57.图3示出了mri系统中的梯度系统200的示意图。如图3所示,梯度系统200包括谐振电源210,梯度放大器220以及梯度线圈230。谐振电源210可以从外接电源(图中未示出)接收电能,并将其输入的电能调节变换并输出给梯度放大器220,以使得梯度放大器220可以驱动一个或多个梯度线圈230(例如,三个轴的梯度线圈)产生梯度磁场,以方便该磁共振成像系统进行成像。
58.图4示出了图3中所示的梯度放大器300的示意图。如图4所示,梯度放大器300包括功率放大器320。
59.功率放大器320被配置为驱动梯度线圈230。功率放大器320包括多个桥式放大器(bridge amplifier),具体地,包括第一桥式放大器330,第二桥式放大器340以及第三桥式放大器350,且三个桥式放大器330、340、350串联地耦接。桥式放大器330、340、350具有相似
的拓扑且与梯度线圈230串联地耦接。尽管图4中仅示出了三个桥式放大器,然而本领域技术人员应该理解,功率放大器320可以包括串联地彼此耦连的任何数量的桥式放大器。
60.在一些实施方式中,桥式放大器330、340、350为全桥式放大器,其包括第一臂(或左臂)和第二臂(或右臂),其中,以第一桥式放大器330为例,所述第一臂包括串联的第一开关331和第二开关332,所述第二臂包括串联的第三开关333和第四开关334,类似的,第二桥式放大器340的第一臂包括串联的第一开关341和第二开关342,其第二臂包括串联的第三开关343和第四开关344,第三桥式放大器350的第一臂包括串联的第一开关351和第二开关352,其第二臂包括串联的第三开关353和第四开关354。在一些实施例中,开关331~334,341~344,351~354可以是任何合适的固态半导体开关器件,例如,绝缘栅双极型晶体管(insulated gate bipolar transistor,igbts)和金属氧化物半导体场效应晶体管(metal oxide semi-conductor field effect transistors,mosfets)。
61.第一dc电压源335跨越第一桥式放大器330而耦接,第二dc电压源345跨越第二桥式放大器340而耦接,并且第三dc电压源355跨越第三桥式放大器350而耦接。将dc电压源335、345、355中的每一个配置为跨越对应的桥式放大器而供应实际上相似的dc电压,例如,如果期望供应大约800伏特的dc电压,则dc电压源325则向对应的桥式放大器供应大约800伏特的dc电压。
62.梯度线圈230的一端连接在第一桥式放大器330的第一开关331和第二开关332之间的连接点,梯度线圈230的另一端连接在第三桥式放大器350的第三开关353和第四开关354之间的连接点。尽管图4中仅示出了一个梯度线圈230,然而本领域技术人员应该理解,mri系统典型地包括三个梯度线圈,例如x轴梯度线圈、y轴梯度线圈、以及z轴梯度线圈以用于进行选层、相位编码以及频率编码,每个梯度线圈都对应类似于图4所示的梯度放大器结构。在一些实施方式中,梯度线圈230中的典型电感等级可以处于从大约几百微亨(μh)到大约1毫亨(mh)的范围中。
63.在一些实施方式中,梯度放大器300进一步包括滤波器模块360,滤波器模块360耦接到功率放大器320的输出端,以使得与功率放大器320所供应的线圈电流信号相关联的纹波电流(ripple current)最小化。在使得纹波电流最小化时,滤波器模块360向梯度线圈230提供滤波后的线圈电流信号。其中,线圈电流信号为在滤波器单元360的输出处获得的电流。
64.在一些实施方式中,梯度放大器300进一步包括温度测量模块(图中未示出),以确定功率放大器320的温度(或热量)。在一些实施方式中,热传感器可以设置在功率放大器320中。
65.在一些实施方式中,梯度放大器300进一步包括冷却模块(图中未示出),以用于给功率放大器320降温。
66.在一些实施方式中,梯度放大器300进一步包括控制模块310。控制模块310为一种控制器或处理器,其被配置为控制或调节向梯度线圈230提供的电压信号的幅度电平和频率。在一些实施方式中,控制模块310可以是设置在梯度系统的控制器中的,也可以是设置在整个mri系统的控制器(例如,如图1所示的控制器单元120)中的。
67.当第一开关331、341、351以及第四开关334、344、354导通时,功率放大器320会输出如302所示的负向直流电流,而当第二开关332、342、352以及第三开关333、343、353导通
时,功率放大器320会输出如301所示的正向直流电流。由于mpg脉冲是施加在选层梯度、相位梯度、频率梯度中的至少一者上的脉冲,且这两个脉冲方向相同且间隔时间较短,这就会使得对应该梯度线圈的功率放大器(或桥式放大器)中的开关(例如第一开关和第四开关)长时间处于导通状态,相应的会导致较大的功率损耗以及较短的寿命。
68.因此,本发明的控制模块被配置用于执行成像扫描序列,所述序列包括运动探测梯度,其中,在执行成像扫描序列前,当被检测对象信息与前次扫描相比发生改变,或累积时间达到阈值时,通过控制梯度放大器,以改变mpg的脉冲方向。具体地,当被检测对象改变或者累积时间达到阈值时,通过控制梯度放大器中的桥式放大器,使得其中的开关单元切换,以改变输出的电流方向,以使得梯度线圈可以产生方向相反的mpg的脉冲方向。
69.在一些实施例中,控制模块进一步被配置用于保存改变后的mpg的脉冲方向,并计算采用改变的mpg的脉冲方向的扫描累积时间。具体地,控制模块可以将每次成像扫描过程中的mpg的脉冲方向进行记录并保存在相关的存储设备或存储器中,进一步地,为了便于控制以及保存,可以用标记表示mpg的脉冲方向,例如,分别用数字0和1代表正向和负向。
70.在一些实施例中,控制模块进一步被配置用于获取前次扫描过程中的mpg的脉冲方向,且在获取前次扫描过程中的mpg的脉冲方向的同时(或之前或之后),可以获取前次扫描过程中的被检测对象信息以及累积时间。此外,控制模块也可以获取当前的被检测对象信息。
71.具体地,被检测对象信息包括被检测对象的体重信息。该体重信息可以是基于用户通过操作控制台单元输入的,也可以是通过设置在病床(或检测床)上的称重组件获得的。由于被检测对象的体重信息本身对于磁共振成像就是必要的,通过监测被检测对象的体重的改变来进行控制不需要修改其他的软件或硬件,方便快捷。
72.可选地,被检测对象信息也可以是被检测对象的身份信息。该身份信息可以是通过用户通过操作控制台单元输入的,也可以是通过设置在扫描间或控制间的识别装置(例如rfid识别、读卡器或条形码识别等)或相机装置进行识别并发送到控制模块的。
73.另外,累积时间为当mpg的脉冲方向发生改变前的扫描累积时间,例如,如果当前的mpg的脉冲方向已经累积使用超过预设时间(例如,12小时),则需要改变mpg的脉冲方向,具体地,该累积时间可以是在施加任意一个mpg脉冲时所记录的时间并计算的累积时间。
74.在另一些实施例中,累积时间包括磁共振成像系统的扫描累积时间,具体地,可以通过记录实时时间,当实时时间达到预设时间时,则改变mpg的脉冲方向,例如,可以设置在每天的12:00时改变mpg的脉冲方向。此外,该累积时间可以是整个扫描序列开始时所记录的时间,也可以是在扫描序列结束时所记录的时间,例如,当系统已经扫描了预设时间(24小时)时,改变mpg的脉冲方向。
75.本领域技术人员应该理解,并不应将累积时间限于上述的实施例,记录并应用累积时间作为改变脉冲方向的一个条件是为了避免长时间只对一个病人进行扫描而无法切换mpg脉冲的情况。
76.在实际扫描过程中,也可以将时间设置为进行切换的唯一条件,即每隔一个预设的时间就切换一次mpg脉冲的方向,这样的控制方式便于实现且便于操作。
77.在一些实施例中,上述的mpg的脉冲方向(或其标记)、被检测对象的信息以及累积时间是(以例如数据库形式)保存在一起的,以方便获取及保存。
78.本发明的控制模块进一步被配置用于在所述序列的激发脉冲到信号采集脉冲时间段内,施加梯度脉冲,且该梯度脉冲的方向与改变的mpg脉冲方向一致。其中,术语“激发脉冲”是指发射第一个90
°
激励脉冲的时刻,术语“信号采集脉冲”是指发射频率编码梯度脉冲,读出梯度脉冲或回波信号读出梯度脉冲等的时刻。具体地,在所述序列的激发脉冲到信号采集脉冲时间段内,一般会施加选层梯度脉冲,则该选层梯度脉冲被设置与mpg脉冲方向保持一致,例如,如果mpg脉冲为正向,则选层梯度脉冲也为正向,如果mpg脉冲为负向,则选层梯度脉冲也会负向。本领域技术人员应该知晓,在激发脉冲到信号采集脉冲时间段内,如果还施加相位梯度脉冲,则该相位梯度脉冲的方向也设置为与mpg脉冲方向一致。
79.在信号采集阶段,所施加的梯度脉冲方向为默认方向(正向),例如,在信号采集阶段,施加的频率以及相位梯度脉冲均为正向。具体地,由于mpg脉冲时在激发到采集的时间段内施加在至少一个梯度线圈上的,例如,mpg脉冲是施加在相位梯度上的,则mpg脉冲的方向是会改变的,但是当进入采集阶段,相位梯度脉冲则恢复到默认方向。
80.图5示出了本发明一些实施例的磁共振成像方法400的流程图。如图5所示,磁共振成像方法400包括执行成像扫描序列,所述序列包括运动探测梯度,其中,在执行所述序列时,当被检测对象信息与前次扫描相比发生改变,或累积时间达到阈值时,改变所述运动探测梯度的脉冲方向。
81.图6示出了如图5所示的磁共振成像方法的具体流程图。如图6所示,在步骤510中,获取前次扫描过程中的mpg的脉冲方向。具体地,每次扫描的过程中,需要记录并保存mpg的脉冲方向,为了便于控制以及保存,可以用标记表示mpg的脉冲方向,例如,分别用数字0和1代表正向和负向。在一些实施例中,当无法获取到前次扫描的mpg的脉冲方向时,例如,在系统装配后初次扫描时,或者恢复出厂设置后的初次扫描,则使用系统默认值(例如,正向)进行成像扫描,可选地,也可以将系统默认值记录并保存在前次扫描的相关参数中,仍然通过后续判断进行mpg的脉冲方向的确认和成像扫描。
82.在步骤520中,获取前次扫描过程中的被检测对象信息以及累积时间。具体地,被检测对象信息包括被检测对象的体重信息,可选地,被检测对象信息也可以是被检测对象的身份信息。
83.另外,累积时间为当mpg的脉冲方向发生改变前的扫描累积时间,例如,如果当前的mpg的脉冲方向已经累积使用超过预设时间(例如,12小时),则需要改变mpg的脉冲方向,具体地,该累积时间可以是在施加任意一个mpg脉冲时所记录的时间并计算的累积时间。在另一些实施例中,累积时间包括磁共振成像系统的扫描累积时间,具体地,可以通过记录实时时间,当实时时间达到预设时间时,则改变mpg的脉冲方向,例如,可以设置在每天的12:00时改变mpg的脉冲方向。此外,该累积时间可以是整个扫描序列开始时所记录的时间,也可以是在扫描序列结束时所记录的时间,例如,当系统已经扫描了预设时间(24小时)时,改变mpg的脉冲方向。本领域技术人员应该理解,并不应将累积时间限于上述的实施例,记录并应用累积时间作为改变脉冲方向的一个条件是为了避免长时间只对一个病人进行扫描而无法切换mpg脉冲的情况。
84.尽管图6中示出了前次扫描过程中的mpg的脉冲方向以及被检测对象信息、累积时间是通过两个步骤分别获取的,然而本领域技术人员应该理解,上述的信息是可以同时获取的,进一步地,每一次扫描过程中的mpg的脉冲方向、累积时间、被检测对象的信息是以类
似数据库的形式保存在一起的。
85.在步骤530中,获取当前的被检测对象的信息。具体地,被检测对象的体重信息可以是基于用户通过操作控制台单元输入的,也可以是通过设置在病床(或检测床)上的称重组件获得的。另外,被检测对象的身份信息可以是通过用户通过操作控制台单元输入的,也可以是通过设置在扫描间或控制间的识别装置(例如rfid识别、读卡器或条形码识别等)或相机装置进行识别得到的。
86.在步骤540中,判断被检测对象信息是否发生改变,当被检测对象信息发生改变时,接着进入步骤560,如果被检测对象信息未发生改变,则进入步骤550。
87.在步骤550中,判断累积时间是否达到阈值,当累积时间达到阈值时,接着进入步骤560,如果累积时间未达到阈值,则进入步骤570。
88.在步骤560中,改变mpg的脉冲方向并保存。具体地,保存改变的mpg的脉冲方向,并计算采用改变的mpg的脉冲方向的扫描累积时间。当被检测对象信息发生改变或者累积时间达到阈值时,则改变mpg的脉冲方向,例如,前次扫描中mpg的脉冲方向为正,则当被检测对象信息发生改变或者累积时间达到阈值时,将mpg的脉冲方向变为负以执行新的成像扫描。接着进入步骤580。
89.在步骤570中,采用前次扫描的mpg的脉冲方向(步骤510中获取到的前次扫描过程中的mpg的脉冲方向)并保存。当被检测对象未发生改变,且累积时间也未达到阈值时,还是采用前次扫描过程中的mpg的脉冲方向,例如,当一直对同一个被检测对象进行扫描且时间未达到预设阈值(例如24小时),则在该过程中不改变mpg的脉冲方向。接着进入步骤580。
90.在步骤580中,在所述序列的激发脉冲到信号采集脉冲时间段内,施加梯度脉冲,且所述梯度脉冲的方向与所述改变的mpg脉冲方向一致。具体地,在所述序列的激发脉冲到信号采集脉冲时间段内,将选层梯度脉冲的方向设置与mpg脉冲方向一致。
91.在步骤590中,执行成像扫描。具体地,可以将交替的正负方向的mpg的脉冲施加在选层、频率以及相位梯度中的至少一者上,以进行磁共振成像。
92.尽管图6中示出了先判断被检测对象是否发生改变,再判断累积时间是否达到阈值,然而本领域技术人员应该理解,并不限于上述的先后,也可以先判断累积时间是否达到阈值,再判断被检测对象是否发生改变,或者,也可以根据磁共振成像相关的扫描对象、扫描需求等设置只需要根据累积时间进行判断,例如,设置为每24小时改变一次,也可以设置为只需要根据本检测对象的信息进行判断,例如,设置为每更换一次被检测对象就改变一次mpg的脉冲方向,当然的,也可以设置任何适宜的的判断条件,以使得mpg的脉冲方向可以按照适宜的规律进行交替的更改,以缓解梯度放大器中开关部件的压力。
93.尽管图6中示出了首先就获取前次扫描过程中的mpg的脉冲方向(步骤510),然而本领域技术人员应该理解,也可以在进行判断结束后(步骤550之后)再获取前次扫描过程中的mpg的脉冲方向,并根据判断结果确定是否改变mpg的脉冲方向进行成像扫描。
94.尽管图6中未示出在信号采集阶段对梯度脉冲方向的设置,然而,正如前面所述的,在信号采集阶段,所施加的梯度脉冲方向均设置为默认方向(正向),例如,在信号采集阶段,施加的频率以及相位梯度脉冲均为正向。具体地,由于mpg脉冲时在激发到采集的时间段内施加在至少一个梯度线圈上的,例如,mpg脉冲是施加在相位梯度上的,则mpg脉冲的方向是会改变的,但是当进入采集阶段,相位梯度脉冲则恢复到默认方向。
95.此外,由于被检测对象的体重信息本身对于磁共振成像就是必要的,通过监测被检测对象的体重的改变来进行控制不需要修改其他的软件或硬件,方便快捷。
96.图7示出了本发明一些实施例的的磁共振成像方法的脉冲序列。如图7所示,序列600为一些实施例的进行磁共振扫描的脉冲序列,序列700为根据本发明的磁共振成像方法进行扫描的脉冲序列。图7示出了将mpg脉冲施加在相位梯度上的实施例,本领域技术人员应该理解,mpg脉冲可以施加在至少一个梯度上,且具有相似的序列。此外,在图7中,坐标横轴代表时间,单位是ms,纵轴代表梯度幅值,单位为gs/cm。
97.根据序列600可以看出,在t1时间,施加了一个90
°
的rf脉冲,此时即为“激发”时刻,同时,选层梯度脉冲gs也同时施加到梯度线圈上,在t1预定的一段时间后(例如如图7所示的50ms),施加了一个180
°
的rf脉冲,且在180
°
的脉冲两端,分别在相位梯度上施加了mpg脉冲,在t2时间,同时施加了频率以及相位梯度脉冲,此时即为“采集”时刻。
98.如序列700可知,可以根据被检测对象信息或累计时间,改变mpg脉冲的方向,例如,将mpg方向改变为负向,此外,在t1到t2时间内,即激发到采集时间段内,将梯度脉冲方向设置为与mpg脉冲方向相同,例如,将选层梯度脉冲gs的方向也设置为负向,而在t2时间之后,也即采集阶段,梯度脉冲方向与序列600相比不发生改变,仍为默认的正向。也就是说,本申请所提出的磁共振成像方法可以根据根据被检测对象信息或累计时间,交替地使用序列600以及序列700两组序列,即交替地改变mpg脉冲的方向。
99.图8示出了采用第一扫描参数且mpg的脉冲方向为正时所得的医学图像,图9示出了采用第一扫描参数且mpg的脉冲方向为负时所得的医学图像。如图8-9所示,两者除了mpg脉冲方向不同之外,其他参数均相同,而得到的医学图像基本无差别。
100.图10示出了采用第二扫描参数且mpg的脉冲方向为正时所得的医学图像,图11示出了采用第二扫描参数且mpg的脉冲方向为负时所得的医学图像。如图10-11所示,在不同的扫描参数的情况下,改变mpg脉冲方向也并不能改变医学图像的图像质量。
101.综上,本发明一些实施例的磁共振成像方法,在其他扫描参数不变的情况下,仅改变mpg的脉冲方向并不影响图像的质量,而且可以进一步缓解梯度放大器中的开关单元的压力,避免了开关单元长时间导通,降低了梯度系统的能量损耗,且提高了相关元器件的使用寿命。此外,由于被检测对象的体重信息本身对于磁共振成像就是必要的,通过监测被检测对象的体重的改变来进行控制不需要修改其他的软件或硬件,方便快捷。
102.本发明还可以提供一种非暂态计算机可读存储介质,其用于存储指令集和/或计算机程序,该指令集和/或计算机程序由计算机执行时使计算机执行上述的获取截断部分预测图像的方法,执行该指令集和/或计算机程序的计算机可以为mri系统的计算机,也可以为mri系统的其它装置/模块,在一种实施例中,该指令集和/或计算机程序可以编制于计算机的处理器/控制器中。
103.具体地,该指令集和/或计算机程序由计算机执行时使计算机:
104.执行成像扫描序列,所述序列包括运动探测梯度,其中,在执行所述序列时,当被检测对象信息与前次扫描相比发生改变,或累积时间达到阈值时,改变所述运动探测梯度的脉冲方向。
105.如上所述的指令可以被合并为一个指令执行,任一指令也可以被拆分成多个指令以执行,此外,也并不限于按照上述的指令执行顺序。
106.如本文使用的,术语“计算机”可包括任何基于处理器或基于微处理器的系统,其包括使用微控制器、精简指令集计算机(risc)、专用集成电路(asic)、逻辑电路和能够执行本文描述的功能的任何其它电路或处理器的系统。上文的示例只是示范性的,并且从而不意在采用任何方式限制术语“计算机”的定义和/或含义。
107.指令集可包括各种命令,其指示作为处理机的计算机或处理器执行特定的操作,例如各种实施例的方法和过程。指令集可采用软件程序的形式,该软件程序可形成一个或多个有形的非暂时性计算机可读介质的一部分。该软件可采用例如系统软件或应用软件的各种形式。此外,该软件可采用独立程序或模块的集合、在更大程序内的程序模块或程序模块的一部分的形式。该软件还可包括采用面向对象编程的形式的模块化编程。输入数据由处理机的处理可响应于操作者命令,或响应于先前的处理结果,或响应于由另外一个处理机作出的请求。
108.上面已经描述了一些示例性实施例,然而,应该理解的是,可以做出各种修改。例如,如果所描述的技术以不同的顺序执行和/或如果所描述的系统、架构、设备或电路中的组件以不同方式被组合和/或被另外的组件或其等同物替代或补充,则可以实现合适的结果。相应地,其他实施方式也落入权利要求的保护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1