一种上下肢康复训练器的控制方法与流程
本发明涉及医疗康复领域,具体地涉及一种上下肢主被动康复训练器中控制电机输出力矩的方法。
背景技术:
上下肢康复训练器通过电机带动踏板,辅助患者运动,适用于因各种原因导致运动障碍,自身行动能力处于恢复过程中的患者。
一些患者肌肉的剩余力量很低,这类患者的肌肉力量不足以支持他们做简单的站立,抬腿,行走等运动,这会导致患者的肌肉无法通过通常的运动得到充分有效的锻炼,且患者可能误认为自己的肌肉力量已经完全丧失。对于此种患者,上下肢康复训练器通过为踏车运动提供助力,辅助患者进行运动,帮助患者感受到自身肌肉的剩余力量,增强患者自信,缓解患者的痉挛发生。
一些患者的肌肉有一些剩余力量,这类患者可以用自己的力量踏动上下肢康复训练器的踏板。此时上下肢康复训练器可以提供可调节阻力,帮助患者进行锻炼。
一些患者介于二者之间,他们的肌肉力量虽有剩余,可以短时间支持肢体运动,但因为缺乏锻炼等原因,其体力不足以支持其做较长时间的主动运动,上下肢康复训练器需要在上述两种模式之间切换。
现有的上下肢康复训练器虽然可以在这两种模式中切换,但需要手动操作,上肢运动障碍的患者在训练过程中往往需要将上肢固定在训练器上,不能自己操作训练器,若患者需要在训练器提供助力和提供阻力之间切换,则需要他人的帮助。且切换过程中,电机运动模式的变化可能导致电机振动或速度突变,影响患者的使用体验。
技术实现要素:
由于上下肢训练器在切换工作模式的过程中存在上述缺点,提出一种智能上下肢训练器控制方法,该方法通过实时识别患者的肌肉力量,自动改变上下肢训练器的主动或被动工作方式,这种工作模式的切换方式无需他人的帮助。并最大限度的减少主动和被动模式切换过程中的电机振动。
为实现上述目的,本发明所采用的技术方案是:
一种上下肢康复训练器的控制方法,包括如下步骤:控制器根据康复训练器反馈的电机电流实时计算使用者的肌肉力量,判断使用者的行为状态,输出不同行为状态下的电机转矩给电机,控制康复训练器运转从而实现对使用者的肢体康复训练。
所述电机为上肢电机或下肢电机。
所述控制器根据康复训练器反馈的电机电流实时计算使用者的肌肉力量,包括:
当使用者使用上下肢康复训练器进行被动训练时,若速度不发生突变,则满足:
tuser+tmotor=tf(1)
其中,tuser为患者提供的推力,可按照上述公式推算其大小的相对变化以及具体值;tf为电机轴的机械摩擦带来的阻力,是定值,通过训练器空载试验测量具体数值;tmotor为电机输出力矩,受到控制器的控制,可实时调节,可通过电流判断。
所述使用者的行为状态包括:被动模式、被动模式→主动模式过渡、主动模式、主动模式→被动模式过渡,形成状态切换的循环。
所述被动模式下,当患者的肌肉力量很低,不足以支持肢体的运动时,tuser为负数,表示患者对踏板的运动产生阻力;此时,控制器检测到使用者对踏板产生阻力,提升电机上的输出转矩tmotor,使得式(1)依然成立,踏板速度不发生突变。
所述被动模式→主动模式过渡过程中,当患者的肌肉力量较强,足以提供支持肢体运动的力量,tuser为正数;此时,使用者对踏板的运动产生助力,控制器相应减小电机输出转矩tmotor,直到输出转矩tmotor<0使得式(1)依然成立。
所述主动模式下,输出转矩tmotor<0,控制器控制电机输出转矩仍然减小,电机输出的转矩对踏板的运动产生阻力;这种情况下使用者会感受到踏板阻碍肢体的运动,为了防止阻力过大,对患者造成伤害,设定阻力的上限tlimit,使得:-tmotor≤tlimit。
所述主动模式下还包括使用者自行调节阻力:
若患者的力量继续增加,由于电机的输出阻力最大为tlimit,
tuser+tlimit>tf
此时踏板速度取决于患者的踏动速度,处于主动模式时,tlimit即为患者感受到的阻力,该阻力可由使用者自行调节。
所述主动模式→被动模式过渡过程中,患者的力量下降,导致:
tuser+tmotor<tf
此时,由于电机提供阻力转矩,踏板速度下降,为防止踏板速度突变,产生式振动,需要对tmotor进行控制,使得踏板速度平滑下降。
所述使得踏板速度平滑下降是通过如下步骤实现的:
设定一段时间[t1,t2]之内,踏板要达到的角速度与时间的关系,使得踏板速度平稳下降:ω(t2)-ω(t1)=j(tuser+tmotor-tf),其中,j为踏板的转动惯量;
已知期望的速度变化曲线和用户的推力tuser,并且用户的推力不足以推动踏板的运动,则通过控制器调整tmotor,使得踏板的速度按照期望缓慢下降,直至重新切换到被动模式,实现转矩平滑。
本发明的有益效果是:
此种上下肢康复训练器的控制方法可以实时检测患者对踏板的推力,据此实时改变电机的输出力矩,并且可以智能切换主动或被动工作模式。由于上下肢康复训练器在工作过程中,控制器实时平滑调节电机输出力矩的大小,不会产生电机速度和力矩的突变,减少了患者感受到的踏板振动。由于控制器可以智能判断患者的推力状态,自动切换工作模式适配用户的肌肉力量,可以让患者在无需他人从旁协助的情况下,得到最舒适的使用体验。
附图说明
图1为本发明实施例之一的上下肢康复训练器的示意图;
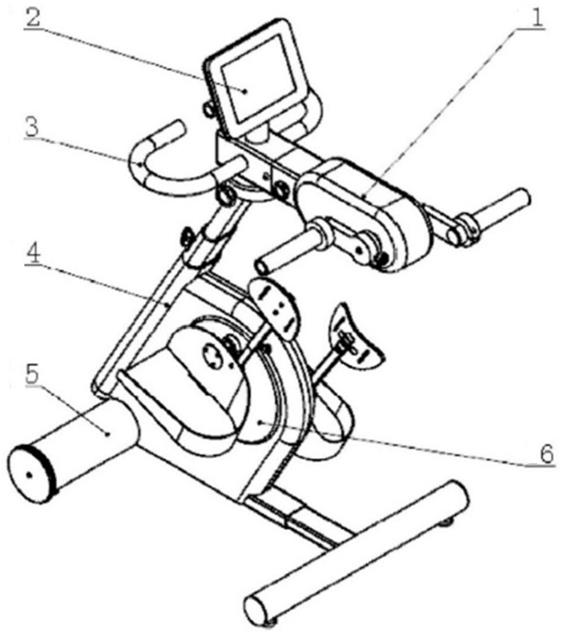
图2为本发明提供的一种上下肢康复训练器整体结构图;
图3为本发明提供的控制器状态切换流程图;
图中标记位置作用如下:1:上肢电机、2:显示器、3:把手、4:升降立柱、5:下肢电机、6:下肢训练部分。
具体实施方式
下面结合附图和实施例,对本发明的具体实施方式作进一步详细描述。以下实施例用于说明本发明的目的,但不用来限定本发明的范围。
图1为一种上下肢康复训练器的示意图,上下肢控制器、上肢驱动器、下肢驱动器安放在此外壳内部。使用时,根据患者的需要,可以单独使用上肢曲柄或下肢踏板进行训练,也可以上下肢同时进行训练。
图2为一种上下肢康复训练器的结构组成,其中上下肢控制器是康复训练器的控制核心。控制器负责控制上下肢康复训练器的工作模式,并利用驱动器反馈的信息计算电机的速度和输出转矩,将这些信息传递给显示器显示。显示器显示当前用户踏动踏板的速度力量等信息,上/下肢驱动器用于驱动电机的运行。
上下肢康复训练器的控制器控制方法如图3所示,上下肢控制器通过通信总线控制电机驱动器,控制器的初始状态为停止状态。用户可以手动控制训练器切换到被动训练模式(过程1),被动模式下控制器实时测量用户的活动状态,根据用户提供的推力自动调节电机的输出力矩。当用户提供的推力已经足以支持其肢体运动,控制器可以自动切换到主动训练模式,无需用户手动切换(过程2)。当用户提供的推力不足以支持其肢体运动,则自动切换到被动模式(过程3)。无论主动模式或被动模式,用户都可以主动手动切换为停止模式(过程4)。
1.当患者进行使用上下肢康复训练器进行被动训练时,若速度不发生突变,则满足:
tuser+tmotor=tf
tuser——患者提供的推力,可按照上述公式推算其大小的相对变化和具体值;
tmotor——电机输出力矩,可以通过电流判断;
tf——电机轴的机械摩擦带来的阻力,为定值,可以通过空载试验得到;
其中,tf是定值,可以通过训练器空载试验测量具体数值,tmotor受到控制器的控制,可以实时调节。
2.当患者的肌肉力量很低,不足以支持肢体的运动时,tuser为负数,表示患者对踏板的运动产生阻力。此时,训练模式为被动模式,控制器检测到患者对踏板产生阻力,提升电机上的输出转矩tmotor,使得上式依然成立,踏板速度不发生突变。此时,电机辅助患者运动,患者只需要很小的力量就可以推动踏板,患者的肌肉可以得到锻炼。这种情况下可以防止患者误认为自己的肌肉力量已经完全丧失,起到增强患者自信的作用。
3.当患者的肌肉力量较强,足以提供支持肢体运动的力量,tuser为正数,患者对踏板的运动产生助力。此时,控制器相应减小tmotor,使得上式依然成立。当tmotor<0才能保持上式成立时,训练模式自动切换到主动模式,电机输出的转矩对踏板的运动产生阻力,这种情况下患者会感受到踏板阻碍肢体的运动,为了防止阻力过大,对患者造成伤害,设定阻力的上限tlimit,使得:
-tmotor≤tlimit
4.若患者的力量继续增加,由于电机的输出阻力最大为tlimit:
tuser+tlimit>tf
此时踏板速度取决于患者的踏动速度,处于主动模式时,tlimit即为患者感受到的阻力,该阻力可以由用户自行调节。
若控制器处于主动模式,但患者的力量下降,导致:
tuser+tmotor<tf
此时由于电机提供阻力转矩,踏板速度下降,为防止踏板速度突变,产生式振动,需要对tmotor进行控制,使得踏板速度平滑下降。
5.若设定踏板要达到的角速度与时间的关系,使得踏板速度平稳下降,则在时刻t时,踏板的角速度为ω(t);
则一段时间[t1,t2]之内,速度变化:
ω(t2)-ω(t1)=j(tuser+tmotor-tf)
j——踏板的转动惯量
上式中,已知期望的速度变化曲线和tuser,通过控制器调整tmotor,使得踏板的速度按照期望缓慢下降。只要用户的推力不足以推动踏板的运动,踏板速度就会不断下降,直至训练模式重新切换到被动模式。
本发明的创新点在于:1.控制器实时测量用户的肌肉力量,据此调节电机的输出力矩,使患者保持在最舒适的状态,有利于患者的肌肉得到合适强度的锻炼;2.现有的产品需要手动控制康复训练器的主动或被动工作模式,本控制方法可以自动识别患者的肌肉力量,智能切换工作模式,使患者无需他人从旁协助即可对工作模式进行切换;3.控制器控制电机的转矩平滑变化,减少了患者感受到的电机振动。
以上所述是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员来说,在不脱离本发明所述原理的前提下,还可以做出若干改进和润饰,这些改进和润饰应视为本发明的保护范围。
- 还没有人留言评论。精彩留言会获得点赞!