基于直线轨迹投影数据的PET成像系统及方法与流程
基于直线轨迹投影数据的pet成像系统及方法
技术领域
[0001]
本发明涉及辐射探测成像领域,更具体地,涉及一种基于直线轨迹投影数据的pet成像系统及方法。
背景技术:
[0002]
正电子发射断层成像(positron emission tomography,以下简称pet)是一种非侵入性的新型医学成像技术,它能通过刻画放射性示踪剂在体内的位置分布和放射性活度的变化,无创、定量、动态地评估动物或者人体活体内各种器官和组织的代谢水平、生化反应和功能活动,可以应用于肿瘤、心脑系统疾病和神经系统疾病的早期诊断和治疗分期,在疾病的早期检测、病理生理机制研究、疗效监测和预后评估等方面发挥着独特的作用。
[0003]
pet的重建方法大体可以分为以fbp为代表的解析法,以ml-em为代表的迭代法。解析法的优势在于重建速度,这可以应用于人体三维全身重建等大型工程中,而迭代法的优势在于可以引入先验信息及噪声模型,在低光子数下也有较好的重建效果。这两种算法都建立在完整的投影数据基础之上。
[0004]
在实际的临床诊断中,pet 80%的功能用于对肿瘤病灶的检测,受限于成本及成像算法的影响,传统的pet系统其成像范围并不能完全覆盖整个人体,对肿瘤的转移和病灶的检测并不能给出确切的诊断方法
[0005]
传统的pet系统是以封闭的环形结构为基础,通过环形探测器采集各个方向上的发射数据,并通过符合甄别得到其中的符合事件,该情况下得到的投影值覆盖整个fov,但在轴向方向上却缺少有效的成像及探测手段。
[0006]
因此,针对上述难题,本发明提出了一种基于直线轨迹投影数据的pet成像系统及方法,该方法同时结合了解析法重建速度快及迭代法可导入噪声模型的优势,利用高精度步进电机模块对被检测物体进行轴向方向的移动,以满足成像所需的轴向分辨率。
技术实现要素:
[0007]
本发明的目的是提供一种基于直线轨迹投影数据的pet成像系统及方法,进而解决pet系统中轴向成像范围小,轴向分辨率低的问题。
[0008]
为解决以上的技术问题提供了一种基于直线轨迹投影数据的pet成像系统及了一种新的扫描模式。
[0009]
基于直线轨迹投影数据的pet成像系统,系统包括:探测模块,包括闪烁晶体模块、光电转化模块、高速读出电子学模块;
[0010]
闪烁晶体模块,所述闪烁晶体模块与光电转化模块相连接并接收被检测物体内发射出的高能伽马光子信号转化为可见光信号;
[0011]
光电转化模块,所述光电转化模块,将可见光信号转化为电信号;
[0012]
高速读出电子学模块,所述高速读出电子学模块将电信号转化为闪烁脉冲信号;
[0013]
符合处理模块,所述符合处理模块利用符合甄别从众多的脉冲信号中筛选出符合
事件并得到系统的投影数据;
[0014]
图像重建模块,图像重建模块利用上述投影数据重建出roi区域图像;
[0015]
高精度电机步进模块,所述高精度电机步进模块将被检测物体以轴向方向进行移动,满足超范围检测;
[0016]
显像模块,所述显像模块将各轴向成像图像进行拼接得到完整的重建图像。
[0017]
优选的,探测模块由lyso晶体模块及bgo晶体模块组成。
[0018]
优选的,光电转化模块,由pmt模块及sipm模块阵列组合而成。
[0019]
优选的,高速读出电子学模块,有别于传统的基于时间采样,而采用了对幅度采样,从而提高了闪烁脉冲上升沿的采样效率。
[0020]
优选的,符合处理模块其中利用了ml-em算法,公式为:
[0021][0022]
对堆积事件进行了处理从而将不可识别的脉冲信号分离成一个个单独的冲激函数形式。
[0023]
优选的,符合处理模块在对探测到的列表数据将进行数据重排,连接环形pet探测系统所有探测器晶体的lors可以看成一簇角度均匀分布平行投影,将这一簇投影按角度及离中心点距离可重排成正弦图格式。
[0024]
优选的,图像重建模块所采用的方法是融合了解析法的快速重建及迭代法的可引入噪声模型等优势。
[0025]
优选的,高精度电机步进模块其每次传送步长为系统最大轴向分辨率s。
[0026]
优选的,显像模块实际操作内容为图像的配准与融合。
[0027]
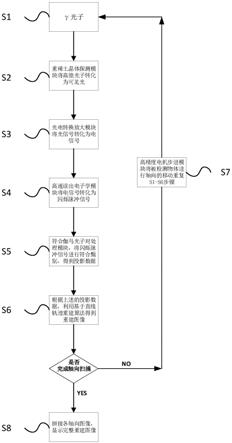
基于直线轨迹投影数据的pet成像方法,其特征在于,所述方法包括以下步骤:
[0028]
步骤s1:探测模块高能伽马光子转化为可见光;
[0029]
步骤s2:光电转化模块,将可见光信号转化为电信号;
[0030]
步骤s3:高速读出电子学模块将电信号转化为闪烁脉冲信号
[0031]
步骤s4:符合处理模块,将闪烁脉冲信号进行符合甄别,通过数据重排得到投影数据;
[0032]
步骤s5:根据上述的投影数据,利用基于直线轨迹重建算法得到重建图像;
[0033]
步骤s6:高精度电机步进模块将被检测物体进行轴向的移动重复s1-s4步骤;
[0034]
步骤s7:显像模块将各轴向图像进行拼接,得到完整的重建图像。
[0035]
有益效果:
[0036]
与现有技术相比,本发明针对pet系统中轴向缺失角问题,利用直线轨迹扫描模式,解决pet系统中轴向成像范围小,轴向分辨率低的问题。
附图说明
[0037]
图1是本发明一种基于直线轨迹投影数据的pet成像系统及方法的流程图;
[0038]
图2是本发明一种基于直线轨迹投影数据的pet成像系统及方法的模块图;
[0039]
图3是本发明一种基于直线轨迹投影数据的pet成像系统及方法中数据重排示意
图。
[0040]
图中:100、探测模块;200、符合处理模块;300、图像重建模块;400、高精度步进电机模块;500、显像模块;110、闪烁晶体模块;120、光电转化模块;130、高速读出电子学模块;111、lyso晶体模块;112、bgo晶体模块;121、sipm模块;122、pmt模块;210堆积筛选模块;220堆积复原模块;230、数据重排模块230;310、快速解析法重建模块;320、poisson模型迭代法重建模块。
具体实施方式
[0041]
以下结合具体实施例,对本发明做进一步说明。应理解,以下实施例仅用于说明本发明而非用于限制本发明的范围。
[0042]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
[0043]
为解决以上的技术问题提供了一种基于直线轨迹投影数据的pet成像系统及了一种新的扫描模式。
[0044]
本发明具体采用以下方案:
[0045]
步骤s1:探测模块将高能伽马光子转化为可见光;
[0046]
步骤s2:光电转化模块,将可见光信号转化为电信号;
[0047]
步骤s3:高速读出电子学模块将电信号转化为闪烁脉冲信号
[0048]
步骤s4:符合处理模块,将闪烁脉冲信号进行符合甄别,通过数据重排得到投影数据;
[0049]
步骤s5:根据上述的投影数据,利用基于直线轨迹重建算法得到重建图像;
[0050]
步骤s6:高精度电机步进模块将被检测物体进行轴向的移动重复s1-s5步骤;
[0051]
步骤s7:显像模块将各轴向图像进行拼接,得到完整的重建图像。
[0052]
所述s1中探测模块与光电转化模块相连接并接收被检测物体内发射出的高能伽马光子信号转化为可见光信号,由lyso晶体模块及bgo晶体模块组成。
[0053]
所述s2中光电转化模块,将可见光信号转化为电信号,由pmt模块及sipm模块阵列组合而成。
[0054]
所述s3中高速读出电子学模块将电信号转化为闪烁脉冲信号,有别于传统的基于时间采样,而采用了对幅度采样,从而提高了闪烁脉冲上升沿的采样效率。
[0055]
所述s4符合处理模块利用符合甄别从众多的脉冲信号中筛选出符合事件并得到系统的投影数据,其中利用了ml-em算法,公式为:
[0056][0057]
对堆积事件进行了处理从而将不可识别的脉冲信号分离成一个个单独的冲激函数形式,并通过数据重排得到投影数据。
[0058]
所述s5图像重建模块,图像重建模块利用上述投影数据重建出roi区域图像,所采用的方法是融合了解析法的快速重建及迭代法的可引入噪声模型等优势。
[0059]
所述s6高精度电机步进模块,所述高精度电机步进模块将被检测物体以轴向方向
进行移动,满足超范围检测,其每次传送步长为系统最大轴向分辨率s
[0060]
所述s7显像模块,所述显像模块将各轴向成像图像进行拼接得到完整的重建图像,实际操作内容为图像的配准与融合。
[0061]
本发明公开了一种基于直线轨迹投影数据的pet成像系统及方法的模块图如图2所示,主要可以分为探测模块100、符合处理模块200、图像重建模块300、高精度步进电机模块400以及显像模块500。
[0062]
其中所述探测模块100与符合处理模块200相连接,探测模块100用于将伽马光子转化为闪烁脉冲的形式以方便之后的数据处理,其中包括闪烁晶体模块110、光电转化模块120以及高速读出电子学模块130。伽马光子最先一步是击中闪烁晶体模块110,闪烁晶体模块110中又包括2种不同的晶体模块lyso晶体模块111以及bgo晶体模块112,该复合晶体将伽马光子从高能光子转化为可见光,从闪烁晶体模块110产生的可见光输入至光电转化模块120,光电转化模块其内部又是利用sipm模块121及pmt模块122组成,经过闪烁晶体模块110及光电转化模块120,高能伽马光子信号将转化为模拟的电信号,之后高速读出电子学模块130对模拟的电信号进行数字化采样,对事例脉冲模拟信号进行等间距的采样,再通过事例脉冲和量化电平进行比较。
[0063]
采样后的数据再输入至符合处理模块200中,筛选出满足时间窗及能量窗的脉冲事例信号对,符合处理模块200包含堆积筛选模块210、堆积复原模块220、数据重排模块230。堆积筛选模块210中,具体内容为筛选出需要复原的堆积事例脉冲,首先是提取出最低量化电平值所对应的两个电压-时间对,如果采样点数大于两个,则我们定义第一个与最后一个电压-时间对采样点为该脉冲的信息数据,之后再对这两个采样点之间的时间差进行计算,如时间差大于单个脉冲的时间差,则认定为堆积事件,反之,则是单个脉冲信号。对于堆积事件将通过堆积复原模块进行复原,将已经发生堆积的事例脉冲信号复原为多个的单个事例脉冲信号。根据半高斯-指数模型对堆积事例脉冲进行拟合,先复原出堆积事例中的第一个事例,再用堆积事例脉冲减去复原出的第一个事例脉冲,以此类推,直至所有事例脉冲都被还原出来。之后我们将得到pet系统中的列表采样数据list-mod,该数据不能直接用于之后的数据重建,需要对其进行重排。通过数据重排模块230进行重排可以得到系统的投影数据。考虑二维断层情况,连接环形pet探测系统所有探测器晶体的lors可以看成一簇角度均匀分布平行投影。如附图说明图3当中所示,实线可定义为角度1下的平行投影,虚线可定义为角度2下的平行投影。以此为依据,pet探测系统投影数据可储存在正弦图中,该正弦图的角度间隔为180o/n,n为整个环上的探测晶体数。而在每一组平行投影中,边缘处的采样密度要高于中间的采样密度。针对roi重建,只取离中心距离r范围内的lors,该情况下各相邻平行投影之间的间距差几乎可以忽略。
[0064]
图像重建模块300利用上投影数据进行重建得到成像数据,其中包括快速解析法重建模块310及poisson模型迭代法重建模块320。pet的重建方法大体可以分为以fbp为代表的解析法,以ml-em为代表的迭代法。解析法的优势在于重建速度,这可以应用于人体三维全身重建等大型工程中,而迭代法的优势在于可以引入先验信息及噪声模型,在低光子数下也有较好的重建效果。图像重建模块中其具体的操作步骤为:首先快速解析法重建模块310进行一个全局的图像重建,作为之后迭代法的重建起始图像,然后poisson模型迭代重建模块利用上述起始图像进行重建,的到最后的重建图像。
[0065]
高精度步进电机模块400,在上述模块完成一个截面的数据采集后将被检测物体进行轴向的移动,最后将各个截面数据通过显像模块500通过图像的配准融合最终得到其超探测范围重建图像。
[0066]
实施例一:
[0067]
此处给出本实施例的参数:
[0068]
时间窗设置为2ns,能量窗为350kev
–
650kev。
[0069]
等间距采样的采样率为500mhz。
[0070]
高精度步进电机每次步进的时间为10min,步进距离为1mm。
[0071]
实施例二:
[0072]
此处给出本实施例的参数:
[0073]
时间窗设置为5ns,能量窗为350kev
–
650kev。
[0074]
等间距采样的采样率为400mhz。
[0075]
高精度步进电机每次步进的时间为20min,步进距离为2mm。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1