心脏消融系统和方法与流程
1.本发明涉及诸如房颤的异常心脏疾病的治疗。具体地,本发明涉及心脏消融系统——用于一种通过伤害或破坏如下的心脏组织的手术,该心脏组织产生不正确的电信号而引起异常的心脏节律。
背景技术:
2.诸如房颤的异常心脏疾病的治疗包括“心脏消融”——一种对产生不正确的电信号而引起异常心脏节律的心脏组织进行伤害或破坏的手术。
3.导管通过患者的血管朝向心脏前进,并且随后定位在肺静脉(pv)口附近。电脉冲被触发并通过导管远端处的电极被引导至组织,以通过创建外周病灶将肺静脉电隔离。当脉管表面具有曲率时,出现以下困难:开口是不均匀的圆形开口。当前的输送系统未能考虑到实际解剖结构,都是在脉管是具有均匀的圆形开口的均匀管的假设的情况下被设计的。
4.此外,由于非特异性和热能源,当前涉及射频(rf)能量的方法会导致组织损伤。此外,当前的方法是耗时的,并且需要高技术的ep来执行该手术。
5.最后,如果当前装置定位不当,则存在永久损伤的风险,因此部署的准确性非常重要。
技术实现要素:
6.在第一方面中,本发明提供了一种用于治疗心脏组织的心脏消融系统,一种用于治疗心脏组织的心脏消融系统,包括导管和头部,所述头部是心脏消融系统对心脏组织的消融作用端,所述导管是心脏消融系统用来连接头部的柔性管状连接体,其创新点在于:所述头部具有多个相互独立的消融元件;每个消融元件均设有用来接触心脏组织的接触表面以及用来支撑接触表面的柔性支撑体,其中,接触表面上设有能量作用部;所述消融元件在心脏消融系统的头部位置处具有收缩和伸展两种工作状态,其中,在收缩状态下多个相互独立的消融元件相互聚集并呈现最小体积,在伸展状态下一个或多个相互独立的消融元件张开,并通过各个消融元件上的接触表面以适应方式来贴合心脏组织被接触处的各种形状变化。
7.因此,本发明提供了一种将电极输送至组织的消融头部,该头部具有能够单独地操作的消融元件。此外,所述消融元件被布置成用于弹性接合,以向组织施加超过由操作员所提供的预载荷。
8.能量作用部可以被布置成提供电脉冲、射频(rf)能量或低温能量。
9.本发明提供了优于现有技术的若干优点,所述若干优点包括:1、在一些实施方式中,该装置可能能够处理pv口和脉管的独特不对称的解剖结构,并且适应周向卵形和圆形解剖结构。因此,本发明旨在考虑独特的解剖结构来输送能量以达
到最佳结果。
10.2、在一些实施方式中,本发明可以基于消融需要,通过电极的灵活定位来在周向上提供脉冲电场(pulsed electric field,简称pef)消融和提供点消融(根据需要)。
11.3、现有技术的治疗以“逐点”方法进行病灶的消融。该方法需要ep技能来精确地控制工具,以确保形成连续的“消融路径”以实现完全的电隔离。本发明允许电生理学家(electro physiologist,简称ep)执行独立于ep技能的支持和辅助隔离。本发明还允许连续的病灶消融,该连续的病灶消融无需逐点消融。
12.4、现有技术的治疗方法需要大量的时间进行定位和输送射频(rf)或其他热消融能量。由于上述原因,本发明只需要花费一小部分时间用于执行治疗动作。
附图说明
13.将方便的是,关于示出本发明的可能布置的附图进一步描述本发明。本发明的其他布置是可行的,并且因此,附图的特殊性不应被理解为取代本发明的前面描述的一般性。
14.图1a至图1g是根据本发明的第一实施方式的各个视图;图2a至图2c是根据本发明的第二实施方式的各个视图;图3a至图3g是根据本发明的第三实施方式的各个视图;图4a至图4g是根据本发明的第四实施方式的各个视图;图5a至图5h是根据本发明的第五实施方式的各个视图;图6a至图6e是根据本发明的第六实施方式的各个视图;图7a至图7f是根据本发明的第七实施方式的各个视图;图8a至图8b是根据本发明的第八实施方式的各个视图;图8c至图8d是根据本发明的第九实施方式的各个视图;图8e至图8f是根据本发明的第十实施方式的各个视图;图8g至图8h是根据本发明的第十一实施方式的各个视图;图8i至图8k是根据本发明的第十二实施方式的各个视图;图9a至图9b是根据本发明的第十三实施方式的各个视图;图9c至图9d是根据本发明的第十四实施方式的各个视图;图10a至图10d是根据本发明的第十五实施方式的各个视图;图11a至图11h是根据本发明的第十六实施方式的各个视图;图12a至图12f是根据本发明的第十七实施方式的各个视图;图13a至图13b是根据本发明的第十八实施方式的各个视图;图13c至图13d是根据本发明的第十九实施方式的各个视图;图13e是根据本发明的第二十实施方式的等距视图;图13f是根据本发明的第二十一实施方式的等距视图;图14a至图14k是根据本发明的第二十二实施方式的各个视图;图15a至图15c是根据本发明的第二十三实施方式的各个视图;图16a至图16o是根据本发明的第二十四实施方式的各个视图;图17a至图17j是根据本发明的第二十五实施方式的各个视图;图18a至图18d是根据本发明的第二十六实施方式的各个视图;
图19a至图19f是根据本发明的第二十七实施方式的各个视图;图20a是在施加脉冲能量消融装置之后的电穿孔电压输送(pv截面)的示意图;图20b是在施加脉冲能量消融装置之后的消融能量(pv截面)的示意图;图20c是使用传统rf治疗的消融图案(左)和使用本发明装置的脉冲消融的消融图案的示意图;图21a至图21g是根据本发明的各个实施方式的各个视图;以及图22a至图22f是根据本发明的各个实施方式的过程的各个流程图。
具体实施方式
15.下面结合附图及实施例对本发明作进一步描述:本发明旨在输送脉冲能量以破坏心脏内产生不正确电信号的组织。例如,本发明的尖端经由导管被输送至心脏的左心房(la)中。根据解剖学规范或操作者的喜好,可以将装置部署至肺静脉(pv)口或经由导管系统部署至pv中,以治疗具有房颤的患者。
16.脉冲能量可以呈现包括低温能量、射频(rf)或电脉冲的不同形式,因此能量作用部可以被布置成提供电脉冲、射频(rf)能量或低温能量的部位,其中射频能量可以由射频发生器提供,能量作用部可采用电极;脉冲能量可以由直流发生器,能量作用部可采用电极;低温能量可以由氩气发生器提供,可采用类似于低温探头的方式布置能量作用部。其中能量作用部位于与将利用的能量的类型相对应的各个元件上。因此,应当理解的是,尽管以下实施方式通常涉及传输电脉冲,但是代替地,这些布置可以同样适于在传输其他形式的能量的情况下使用,所述其他形式的能量包括但不限于低温能量和rf脉冲系统。
17.本发明的重要特征是其提供与组织的弹性接合的能力。本质上是,消融元件对组织提供有效压力,从而获得更好的接合,对组织进行塑形(弹性变形)或对组织进行定位(弹性移位)。在任一种情况下,消融元件都通过变形或移位来单独起作用,以找到以实现更好的接触的平衡位置。这在考虑到组织的形状的可变性以及对更好地接合以进行更有效的治疗的需要时是特别有利的。由于是弹性接合,操作员不需要进行较小和/或重复的位置变化来获得最佳位置。在找到弹性平衡位置时,消融元件会自动地围绕组织定位。
18.以能量作用部采用电极为例,参考以下实施方式所述,为了将装置部署至pv口,本发明的各种实施方式包括:1、具有多个电极(带有或不带有力传感器)的装置;2、具有多个电极+有助于更好地将电极与脉管壁对准的特征的装置;3、具有多个电极+有助于更好地将电极与脉管壁对准的特征+锚固特征的装置。
19.为了将装置部署至pv脉管中,本发明的各种实施方式包括:4、具有多个电极(带有或不带有力传感器)+单独的锚固特征的装置;5、具有多个电极同时部署有锚固件的装置;6、具有在操作员操纵其时实现对脉管壁的良好附着的电极设计的装置。
20.一旦将装置的尖端(带有电极和/或传感器)定位至pv口或pv脉管上,就经由发生器施加直接脉冲能量,继续重复该步骤,直到完全隔离不正确的电信号。
21.考虑到本发明的特定实施方式,并且第一实施方式在图1a至图1g中示出。
22.在此,消融装置5包括安装至导管15的消融头部10。导管15用于将消融头部10插入
至心脏45内的位置中,并且具体围绕肺静脉55的组织60插入,其中截面组织50到截面组织60之间是组织治疗的区域。
23.头部10未膨胀地被插入,直到在适当的位置处,由此消融元件20通过使诸如空气(或其他气体)或水(或其他液体)的流体通过导管15而膨胀。
24.应当注意的是,头部10包括多个消融元件20,并且在这种实施方式中的其中一种情况下,六个消融元件20围绕头部10的中心12外周进行定位。消融元件20包括在消融元件20的接触表面22上的电极。在膨胀时,消融元件20通过元件的弹性变形提供与预期要破坏的组织的弹性接合,使组织作为预期治疗的一部分被破坏。
25.每个消融元件20包括嵌入在接触表面22中的电极30,以用于将电脉冲传递至电极30。当与组织接触时,根据上述方法以及还涉及图22a至图22f中定义的方法,电脉冲通过电极被引导。在该实施方式中,还包括力传感器35,所述力传感器35被布置成向操作员反馈已经与组织接触以及施加至组织的弹性接合的程度,图1d和图1f中的箭头指示消融元件20的弹性结合受力方向40,这可以帮助确保消融元件20与组织的完全接触,并且因此促进更快和更有效的治疗。来自传感器的数据可以帮助确定电极的位置和贴靠度。应当理解,尽管是可选的,传感器可以被包括但不限于在网络内以用于温度监测、接触力监测、阻抗监测和触觉反馈。
26.图2a至图2c示出了图1a至图1g的实施方式的替选实施方式,为第二实施方式。在此,仅有部分消融元件70已经膨胀,并且因此只有膨胀的一侧提供了抵靠组织的弹性变形,图2c中的箭头指示膨胀的消融元件70的弹性变形受力方向62。其他消融元件75保持未膨胀,因此为头部65提供不规则形状以适合肺静脉的口60组织的解剖结构的不规则。因此,对于该实施方式,与由现有技术的装置采用的均匀形状相比,消融元件70的选择性膨胀以及因此保持一些消融元件75未膨胀的能力为消融头部65提供了配合各种形状的能力,从而扩展了其适用性。
27.图3a至图3g示出了根据本发明的一个实施方式的另外的装置80,为第三实施方式。该装置80与前两个实施方式的装置的重要区别在于,膨胀的消融元件用相对硬的长形消融元件105替换。这些元件并不完全是“刚性的”,并且可以具有弹性特性以使得当力被施加时它们能够“弯曲”,在这种情况下,一旦力被去除,它们可能会恢复至其初始形状。这些元件可以由弹性体/硅树脂制成。装置80的头部95包括安装至导管90的多个长形消融元件105。长形消融元件105挠曲地被弹性加载以从头部95的中心102径向地伸出,并且因此在组织60周围弹性地位移,图3b中的箭头指示消融元件105的弹性位移受力方向70,图3g中的箭头指示执行动作1120、动作130时壳体160的移动方输送至心脏需要对长形消融元件105的限制,因此使用了选择性地可移动的壳体100。在由操作员执行动作120时,壳体100被布置成控制长形消融元件105从第一位置115移动至中间位置125,并且随后执行动作130,使壳体100移动至完全部署布置的近侧位置135,。在该实施方式中,执行动作涉及将壳体100从远侧位置朝向导管90的近侧位置收回。
28.一旦在合适的位置处,如已经描述的,在长形消融元件105的接触表面中的电极110引导电脉冲。
29.图4a至图4g示出了与图3a至图3g的实施方式类似的实施方式,为本发明的第四实施方式,其中装置145具有安装至导管155的头部150。该头部150包括长形的消融元件165,
然而该长形的消融元件165不是通常朝向装置的远端向前伸出,在该实施方式中,该长形的消融元件165朝向近端伸出。再次的,在从壳体160释放至远侧位置200时,长形的消融元件165挠曲地被弹性加载以便径向地伸出,以便在组织60周围弹性地移位。由于该长形的消融元件165在与先前实施方式的方向相反的方向上伸出,限制元件的壳体朝向装置的远端移动以释放长形的消融元件165。在这种情况下,操作员向前推动释放机构执行动作185、动作195以移动壳体160,一旦在合适的位置,就使壳体160移动,使壳体位于近侧位置180、中间位置190以及远侧位置200,以使头部150完全部署到位。图4b和图4g中的箭头指示消融元件165的弹性位移受力方向175,图4e中的箭头指示执行动作185、动作195时壳体160的移动方向。
30.图5a至图5h示出了又一实施方式,为本发明的第五实施方式。在此,装置215包括花形头部220,该花形头部220具有从头部220的中心径向伸出的花瓣形消融元件235。花瓣形消融元件235被弯曲形成挠曲弹性体,并且因此以这种方式抵靠组织230形成弹性变形,图5g和图5h中的箭头指示消融元件235的弹性位移受力方向280。
31.鉴于较宽的头部,为了便于插入,使用与图2类似的壳体242来限制花瓣形元件,直到正确定位。一旦在合适的位置处,就使壳体242移动并执行动作240、动作250、动作260,从而逐渐去除限制使其处于第一位置245、第二位置255和第三位置265,以使头部220完全部署。
32.花瓣形消融元件235的扁平形状允许用于电极的各种样式,比如第一样式270、第二样式275。具体地,在第一样式270中,该扁平形状允许对力传感器使用应变计。在这种布置中,与组织的接触涉及消融元件235的弯曲,因此通过应变仪触发对由操作者进行的动作的响应。第二样式275示出了使用薄膜力传感器作为替选方案。应当理解,提供力检测的若干不同方法是可行的,其中本发明的范围不受任何一种方法限制。
33.在图6a至图6e中示出了又一实施方式,为本发明的第六实施方式。在此,装置285包括头部290,该头部具有连杆形式的消融元件300。
34.消融元件300包括串联枢转地连接的一系列区段335,从而允许区段335之间的铰接并且因此使消融元件300在平面内挠曲。
35.在插入时,消融元件300与导管295在外表面平行。一旦在合适的位置,利用施加至联接至导管295的连杆的端部的力来执行部署。随着力增加以执行动作315、动作320、动作325、动作330,连杆元件逐渐被扩展,以采用类似于圆弧的弯曲布置,直至180
°
,模仿“蝎尾”形状。沿连杆的区段330(虽然不一定是全部区段)可以附接有电极305,并且因此元件能够沿连杆的弯曲表面施加电脉冲。当与组织接触时,区段之间的枢轴连接还允许弹性移位。图6b和图6d中的斜向箭头指示消融元件165的弹性位移受力方向310,图6d中的竖直向下的箭头指示动作315、320、325、330的动作方向。
36.因此,头部290可以提供非常宽的弯曲表面以接触组织。因此,这种布置的优点是允许在要被治疗的组织的宽度上具备的显著可变性的能力。由消融元件300所覆盖的跨度仅取决于添加到连杆形式消融元件300长度的区段335数目。理论上平行于导管295的消融元件300在插入时的收回位置意味着连杆式的消融元件300可以非常长,因此一旦部署就具有相当大的消融宽度。
37.图7a至图7f示出了与图3和图4的实施方式类似的实施方式,为本发明的第七实施
方式。各自的消融头部360、358、380、405使用长形的消融元件形成。然而,在这些实施方式中,可膨胀球囊在中央被包括至长形消融元件。在部署时,壳体被收回,在由球囊350、370、390、415的膨胀辅助下,长形的消融元件向外伸出。因此,这些实施方式说明了通过的消融的移位和由球囊的变形的两种弹性结合形式。
38.在这些实施方式中,部署有三个步骤的过程。在一个步骤中,壳体被收回,然后,长形元件径向地扩展,并且球囊从未膨胀状态345、365变化至膨胀状态350、370。图7a和图7b中的箭头分别指示了消融元件的弹性结合受力方向355、375。球囊可以是单个环(ring)(未示出),或者可以是围绕中心放置的多个球囊。
39.关于这些实施方式的一个有趣的方面是其中围绕中心放置不同的球囊。在某些情况下,在膨胀时,弹性接合会发生变化,其中较小的球囊会使长形的消融元件的较小膨胀,而较大的球囊会提供较大的膨胀。这又提供了有差别的弹性接合,其中较小的球囊具有较小的移位395、420,而较大的球囊具有较大的移位400、425,以适应口/pv的解剖角度。因此,这些实施方式还提供了用于要被治疗的组织的形状和尺寸的变化。
40.图8a至图8g以及图9a至图9d示出了与图5的花形实施方式类似的各种实施方式。实施方式总体上与图5的不同之处在于消融元件。虽然呈花瓣状,但是在这些实施方式中的消融元件更加细长,类似于触手。
41.图8a至图8b是根据本发明的第八实施方式的各个视图,图8a和图8b示出了消融元件426,其具有位于导管的尖端内并安装在气动层430上的电极432和传感器。
42.图8c至图8d是根据本发明的第九实施方式的各个视图,图8c和图8d示出了在不具有电极和传感器情况下的消融元件435,其中在每个消融元件435内存在多个通道,多个所述通道互连,并且在消融元件435的基层440处具有刚性材料,在消融元件435的顶部设置具有多个通道的气动层。
43.图8e至图8f是根据本发明的第十实施方式的各个视图,图8e和图8f示出了消融元件445,该消融元件445具有带有“小肌肉(mini muscle)”状的凸起部455——凸起部分具有沿接触表面行进的波纹形状——并且在轮廓化的接触表面使所安装的电极450和传感器附接至导管的尖端并安装在气动层上。
44.图8g和图8h示出了消融元件460中“小肌肉”的凸起部结构,其中每个“小肌肉”区段内的多个通道互连至其他“小肌肉”区段且其表面不包括电极和传感器。“小肌肉”区段结构包括基层465处的刚性材料和顶部上的多通道气动层。
45.图8i至图8k是根据本发明的第十二实施方式的各个视图,图8i至图8k示出了气动系统485的各种方式,该气动系统包括内部多个通道的气动布局470、内部多个通道和外部电极布置的气动布局475以及外部电极布置的气动布局480。
46.图9a至图9b是根据本发明的第十三实施方式的各个视图,图9a至图9b示出了一个单独的“触手”结构,图9a示出了在部署之前的具有气动系统495以及附接至外壳的电极500的结构490,图9b示出在部署之后的具有内部气动系统510以及附接至外壳的电极500的结构505。
47.图9c至图9d是根据本发明的第十四实施方式的各个视图,图9c至图9d示出了一个单独的“触手”结构,图9c示出了在部署之前的具有内部气动系统520和外壳的结构515,图9d示出了在部署之后具有内部气动系统530和外壳结构的结构525。
48.图10a至图10d是根据本发明的第十五实施方式的各个视图,图10a至图10d示出了装置535。该实施方式使用非顺应性球囊(以压力膨胀的聚酯/尼龙材料作为候选物)和顺应性球囊(以体积膨胀的聚氨酯/硅酮材料作为候选物)的组合作为消融元件来实现与组织的更好接触,图10d中的箭头示出了消融元件与组织弹性结合受力方向555。
49.存在若干种不同类型的可膨胀阵列组合,其中以下三种类型为示例:1)使用非顺应性球囊(以压力膨胀的聚酯/尼龙材料作为候选物);2)顺应性球囊(以体积膨胀的聚氨酯/硅酮材料作为候选物);以及3)顺应性球囊和非顺应性球囊两者的组合。
50.在这种布置中,头部540包括具有交替的可膨胀的非顺应性球囊元件545和顺应性球囊元件550的元件环。在膨胀时,有差别的元件扩展该环以匹配口的形状,无论其是圆形的组织60还是卵圆形的组织62。
51.当消融元件膨胀至状态560、565、570时,可变的扩展引起由刚性元件顺应性球囊元件550的弹性移位和由可膨胀元件非顺应性球囊元件545的弹性变形的组合。
52.图11a至图11h是根据本发明的第十六实施方式的各个视图,图11a至图11h示出了若干实施方式以及用于与其他实施方式一起使用的附加特征。
53.首先,心脏消融装置575包括具有可膨胀阵列消融元件585的头部580,消融元件585具有电极和传感器(未标出电极和传感器见图11d中的消融元件605)。在图11c中可以看到在膨胀之前的消融元件595,在图11e中可以看到在膨胀之后消融元件600。
54.值得注意的是,图11c和图11e还示出了选择性膨胀的效果,在这种情况下,选择性膨胀用于根据pv口的形状使头部580成形,并且因此能够适应圆形口的组织60和卵圆形口的组织62。这种选择性膨胀意味着消融元件可以保持未膨胀状态620、部分膨胀状态630或完全膨胀状态625,以获得期望的形状以及相应的弹性接合,在图11c、图11e和图11f中分别示出了消融元件与组织弹性结合受力方向610、615、628、632。
55.图11d和图11g中所示的另一个实施方式是具有锚固件590,该锚固件在导管的远端处呈球囊形式,并且被定位成通过选择性地使锚固件590在肺静脉中进一步远离口的位置膨胀,从而将装置575楔入合适的位置。在该实施方式中,球囊成环形以提供与静脉壁的环状的弹性接合,但是允许血液流过环孔。将可以理解并在后面描述的是,也可以使用可以密封静脉的完整的球囊。这可以具有更大的弹力被施加的优点,并且因此可能提供更大的锚固力。这些锚固件实施方式中的每个均可以与本文中所述的实施方式中的任何一个或大多数一起使用,并且不限于图11中所示的实施方式。
56.图12a至图12f是根据本发明的第十七实施方式的各个视图,装置635包括位于头部的消融元件640,其中一些或每个消融元件640具有刚性部分650、665和可膨胀部分645、655、660、670。当该消融元件640膨胀时,刚性部分防止了均匀扩展并且因此使该消融元件变形。此外,这些元件可以在每个消融元件中包括单独的腔,当这些腔被选择性地膨胀(部分地或完全地或一点也不)时,这些腔可以提供例如可膨胀部分645、660的部分变形或更严重的例如可膨胀部分655、670的更大变形。与以前的实施方式一样,这种适应性允许头部640适配圆形口组织60或卵圆形口组织62,并且使弹性变形不同,图12f中示出了消融元件适配不同组织的弹性变形受力方向580和685。
57.图13a至图13f示出了先前描述的锚固球囊实施方式与其他装置实施方式一起使
用的各种组合,图13a至图13b是根据本发明的第十八实施方式的各个视图,图13c至图13d是根据本发明的第十九实施方式的各个视图,图13e是根据本发明的第二十实施方式的等距视图,图13f是根据本发明的第二十一实施方式的等距视图,包括:1)环状锚固球囊695、725、732其提供孔以允许血流穿过,参见图13a、图13b、图13e;2)完整的锚固球囊725、735,参见图13c、图13d、图13f和图14k。
58.在图13a的装置690中具有球囊700和球囊705,在图13c的装置710中具有球囊715和球囊720,其作用参靠第七实施方式的描述。在图13e和图13f中的装置730,可以参考第六实施方式的描述。
59.图14a至图14k是根据本发明的第二十二实施方式的各个视图,图14a至图14j示出了具有长形头部745的装置740的又一实施方式。在该实施方式中,消融元件755可以侧向地延伸并且在分支760上连接至头部745。在这种情况下,存在两个在长形头部745的相反侧上侧向延伸的消融元件755,其中分支760用于提供弹性接合,以及通过其可以输送能量脉冲,如果使用传感器还可以作为数据传输的管道。
60.为了方便输送,当处于图14a中所示的收回位置时,参见图14e,这些消融元件755与头部处于齐平状态770,从而形成长形头部745的远侧盖。当处于适当的位置时,这些消融元件755延伸并同时打开头部745的远侧孔。从远侧孔处,可以将锚固球囊765从头部内的缩坍状态775部署至从头部向远侧伸出的膨胀位置状态785。一旦球囊被完全部署并且元件完全延伸至膨胀位置状态785,消融就可以开始。
61.该实施方式还示出了锚固球囊部署的过程,在这种情况下,该过程用于完整的锚固球囊750,但是也可以用于环状锚固球囊。
62.球囊765在头部745内未膨胀,呈齐平状态770。随着消融元件755从头部745侧向部署,这会打开形成头部745的外壳以允许球囊765的前进,呈前进状态775,经过过渡状态780后直到膨胀位置状态785、790,以完成完全部署到位。
63.因此,在心脏795的操作中,锚固球囊750将装置740锚定使得消融元件755的侧向部署与组织60对准以开始治疗。
64.图14k示出了锚固球囊754的又一实施方式。在该实施方式中,实际的球囊754与关于其他实施方式所描述的球囊类似。应当理解的是,在消融过程期间,保持血液流过静脉是非常期望的。作为图13e或其他实施方式中的环状锚固球囊735的替选方案,导管756已经在远端调整以允许血液流过导管,从而防止了由球囊754引起的阻塞。具体地,在远端的导管756包括用于接收血流的孔758,血流穿过导管并通过孔762离开,以形成可以让血液流过的旁路,图14k中箭头764指示血流入口方向、箭头766指示血流出口方向。因此,这种设置旁路球囊754的布置的使用一旦适当就用于有限的血流中断。
65.图15a至图15c是根据本发明的第二十三实施方式的各个视图,装置800中包括消融元件805和球囊810,其消融元件805为具有铰接的刚性元件的又一实施方式,这些刚性元件以枢转的方式侧向部署,然后释放并部署至状态815、820、825、830、835。
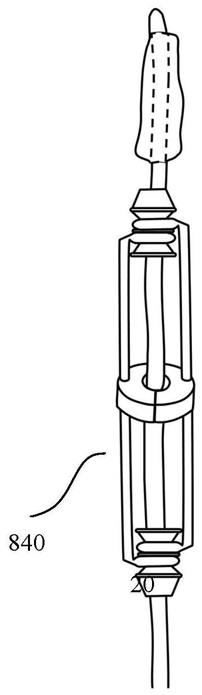
66.图16a至图16o是根据本发明的第二十四实施方式的各个视图,图16a至图16o示出了又一实施方式的装置840,其也显示了完整的球囊锚固件845。在消融元件850的侧向部署的该实施方式中,到导管的连接经由扩展组件855。扩展组件855包括滑动连接和固定连接,滑动连接部分由端部组件860、花键组件865、分隔组件870、花键组件875和固定组件880组
成,使得组件以成三角机构侧向展开消融元件850,其中端部组件860用于将花键组件865、花键组件875一起固定到位,花键组件865、花键组件875连接到电极852使电机滑动(以实现折叠/膨胀),分隔组件870用于支撑电极852的两个花键组件之间的分隔,固定组件880将花键组件与端部组件860固定到位。该扩展组件855通过电隔离组件的每个部分为电极852(如果需要则加上传感器)提供电连接。
67.消融元件可以采取若干不同的形状和取向,包括:具有相邻的极性的四分之一圆的半圆盘890;轮状环895;具有用于放置传感器的的各种凹槽结构930、935、940的半圆柱900、905、915以及半圆形块910。侧向部署的元件用于对组织925进行局部治疗。
68.图17a至图17j是根据本发明的第二十五实施方式的各个视图,其中头部945包括与导管955平行地对准的多个长形可膨胀的消融元件950。可膨胀的消融元件950的位置能够通过在圆形口组织60或卵圆形口组织62上的插入之间的弹性接合而移动。示出了两个不同的实施方式,其中,第一个实施方式具有带有单个管道以使消融元件均匀膨胀(图17c)的导管;以及第二个实施方式的装置975,其中导管包括多个管道985,以选择性地使长形球囊的消融元件980膨胀,并且因此进一步增强使头部变形的能力,以更好地与不同形状的组织接触。
69.图17g示出了的在膨胀之前的球囊状消融元件1005和在膨胀之后的球囊状消融元件1010。图17h示出了具有替代入口结构的球囊状消融元件1015和具有单个入口结构的球囊状消融元件1020。图17i示出了具有嵌入在球囊的表面上的电极1040、1045的球囊状消融元件1035和嵌入在网上的电极1060、1055的球囊状消融元件1050。图17j示出了具有如下电极的装置的规定电场,所述电极安装在面向圆形脉管组织60和卵圆形脉管组织62的pv脉管的球囊状消融元件表面上。
70.图18a至图18d是根据本发明的第二十六实施方式的各个视图,图18a至图18d示出了侧向部署的消融元件的又一实施方式,装置1064包括消融元件和壳体1075,其中消融元件联接至导管的壳体1075。消融元件具有类似于起重机抓斗的钳口1065成形,使得在插入时,钳口1065被关闭,并且被打开以侧向枢转地部署消融元件。钳口1065各自具有被布置成在打开时面对组织的表面,其中该表面带有电极。钳口1065可以被设定尺寸成扩展静脉的尺寸以改善接触。为此,钳口1065的打开程度可以选择性地可控制,并且因此钳口1065的部分打开可以提供与待治疗组织的足够的弹性接合。
71.替选地,钳口在枢轴之间是柔性的,并且因此可以弯曲整个表面以产生弹性变形。
72.可以通过拉杆1070来实现打开钳口1065,使得在执行动作1080拉动所述拉杆1070时,钳口1065会在抵抗弹性变形以保持钳口1065闭合趋势的情况下打开。
73.图19a至图19f是根据本发明的第二十七实施方式的各个视图,示出了装置1085,具有消融元件1100的头部1095。消融元件1100相对于头部1100固定,但是可以从具有杠杆臂1099的头部1095伸出。如图19f所示,头部1130和消融元件1135也可以被成形以更好地适合卵圆形口组织62。
74.相邻的消融元件元件具有相反的极性1105,并且因此在插入时,头部1095围绕卵圆形口组织62逐步地经过不同位置状态1110、1115、1120,以便在装置的顺序定位之后施加电脉冲并实现电穿孔电压输送1125。
75.应当理解,头部的厚度和杠杆臂的长度可以被设计,并且将确定元件能够实现的
弹性变形的程度。
76.图20a示出了在施加脉冲能量消融装置之后的电穿孔电压输送1140(pv截面组织62)。图20b示出了在施加脉冲能量消融装置之后的消融能量1142(pv截面组织62)。图20c示出了指示了使用传统rf治疗的消融图案1150和使用根据本发明的装置的脉冲消融的消融图案1152的两者的心脏1145。
77.图21a是部署特征1155的侧视图,该部署特征使用户能够用一只手控制在远侧定位的电极和用户对根据本发明的一个实施方式的装置的操作方式1160。
78.图21b是使用户能够控制pv口/脉管空间内的电极角度的部署特征1170的前视图以及根据本发明的一个实施方式的装置1165的侧视图。
79.图21c示出了在装置用户界面上的标记1170,该标记1170使用户能够控制角度(15
°
步进角度控制的图示,标记如下0
°
、15
°
、30
°
、45
°
、60
°
、75
°
、90
°
、105
°
、120
°
、135
°
、150
°
和165
°
)。
80.图21d示出了在装置用户界面上的角度标记,该标记使用户能够通过在预定标记处将“按钮/开关”推动来控制角度1190、1195、1200、1205和装置在远端的旋转。
81.图21e示出了使用户能够控制内腔内的电极角度的部署特征的前视图部署1185、侧视图部署1180和透视图部署1175。
82.图21f示出了装置用户界面的角度标记,该装置用户界面使用户能够通过旋转装置的手柄部分上的旋钮/刻度盘来控制装置的远端的电极角度,在这种情况下为30
°
步进角度控制1220,标记1225如下0
°
、30
°
、60
°
、90
°
、120
°
和150
°
。
83.图21g示出了装置的手柄部件的设计,其包括部署1210、1215,用于使球囊结构膨胀,对电极进行部署和对电极的位置进行控制。
84.图22a是示出了在pv口/脉管中部署用于组织消融的装置的方法的流程图,用于具有多个电极(带有或不带有力传感器)的装置,其包括以下各步骤:1230、将装置引入至左心房(例如右股静脉/右颈内静脉)中;1235、基于可见标记将装置部署至期望的位置(例如,pv口);1240、装置的放置的证实被执行(例如荧光透视);1245、电极的良好附着的证实(例如,可荧光透视或力传感器或阻抗读数);1250、脉冲能量消融被施加;1255、装置被重新定位(例如,可以在操作员手柄处调整的顺序角度变化或可膨胀构件的膨胀-缩坍或装置的部署-塌缩特征);1260、执行脉冲消融的重新施加直到肺静脉被成功地隔离为止。
85.图22b是示出了在pv口/脉管中部署用于组织消融的装置的方法的流程图,用于具有多个电极和有助于更好地将电极与脉管壁对准的特征的装置,其包括以下各步骤:1265、将装置引入至左心房(例如右股静脉/右颈内静脉)中;1270、基于可见标记将装置部署至期望的位置(例如,pv口);1275、装置的放置的证实被执行(例如荧光透视);1280、部署特征(可膨胀或启动或物理特征)以有助于将电极附着至壁;1285、电极的良好附着的证实(例如,可荧光透视或力传感器或阻抗读数);1290、脉冲能量消融被施加;
1295、装置被重新定位(例如,可以在操作员手柄处调整的顺序角度变化或可膨胀构件的膨胀-缩坍或装置的部署-塌缩特征);1300、执行脉冲消融的重新施加直到肺静脉被成功地隔离为止。
86.图22c是示出了在pv口/脉管中部署用于组织消融的装置的方法的流程图,用于具有独立的锚固特征、多个电极、有助于更好地将电极与脉管壁对准的特征的装置,其包括以下各步骤:1305、将装置引入至左心房(例如右股静脉/右颈内静脉)中;1310、基于可见标记将装置部署至期望的位置(例如,pv口);1315、装置的放置的证实被执行(例如荧光透视);1320、使用部署特征来锚定装置并且放置被重新证实;1325、部署特征(可膨胀或启动或物理特征)以有助于将电极附着至壁;1330、电极的良好附着的证实(例如,可荧光透视或力传感器或阻抗读数);1335、脉冲能量消融被施加;1340、装置被重新定位(例如,可以在操作员手柄处调整的顺序角度变化或可膨胀构件的膨胀-缩坍或装置的部署-塌缩特征);1345、执行脉冲消融的重新施加直到肺静脉被成功地隔离为止。
87.图22d是示出了在pv脉管中部署用于组织消融的装置的方法的流程图,用于具有多个电极(带有或不带有力传感器)和独立的锚固特征的装置,其包括以下各步骤:1350、将装置引入至左心房(例如右股静脉/右颈内静脉)中;1355、基于可见标记将装置部署至期望的位置(例如,pv口);1360、装置的放置的证实被执行(例如荧光透视);1365、使用部署特征来锚定装置并且放置被重新证实;1370、电极的良好附着的证实(例如,可荧光透视或力传感器或阻抗读数);1375、脉冲能量消融被施加;1380、装置被重新定位(例如,可以在操作员手柄处调整的顺序角度变化或可膨胀构件的膨胀-缩坍或装置的部署-塌缩特征);1385、执行脉冲消融的重新施加直到肺静脉被成功地隔离为止。
88.图22e是示出了在pv脉管中部署用于组织消融的装置的方法的流程图,用于具有多个电极(带有或不带有力传感器)和同时锚固特征的装置,其包括以下各步骤:1390、将装置引入至左心房(例如右股静脉/右颈内静脉)中;1395、基于可见标记将装置部署至期望的位置(例如,pv口);1400、装置的放置的证实被执行(例如荧光透视);1405、部署可膨胀特征以有推动电极附着至壁;1410、电极的良好附着的证实(例如,可荧光透视或力传感器或阻抗读数);1415、脉冲能量消融被施加;1420、装置被重新定位(例如,可以在操作员手柄处调整的顺序角度变化或可膨胀构件的膨胀-缩坍或装置的部署-塌缩特征);1425、执行脉冲消融的重新施加直到肺静脉被成功地隔离为止。
89.图22f是示出了在pv脉管中部署用于组织消融的装置的方法的流程图,用于具有
被设计成当操作员操纵其时实现对脉管壁的良好的附着的电极的装置,其包括以下各步骤:1430、将装置引入至左心房(例如右股静脉/右颈内静脉)中;1435、基于可见标记将装置部署至期望的位置(例如,pv口);1440、装置的放置的证实被执行(例如荧光透视);1445、装置被放置有触摸pv口或pv脉管的电极尖端;1450、脉冲能量消融被施加;1455、以预定角度来旋转装置远端(带有电极);1460、执行脉冲消融的重新施加直到肺静脉被成功地隔离为止。
90.上述实施例只为说明本发明的技术构思及特点,其目的在于让熟悉此项技术的人士能够了解本发明的内容并据以实施,并不能以此限制本发明的保护范围。凡根据本发明精神实质所作的等效变化或修饰,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1