一种基于双绞线驱动的张拉柔性踝关节穿戴助力设备的制作方法
[0001]
本发明涉及辅助行走领域,具体是指一种基于双绞线驱动的张拉柔性穿戴助力设备。
背景技术:
[0002]
踝关节是连接腿部和脚部的重要关节,也是人行走过程中为身体提供支撑和移动的关键部位,由于踝关节是日常活动中使用频率最高的关节,因此对比其他关节更容易发生损伤,现有的可穿戴式辅助行走设备可以分为有源助力设备和无源助力设备两大类,其中无源助力设备主要由各种弹性元件组成,质量轻,但是只能适应固定几种步态,并且助力效果不如有源式效果明显,而有源式助力设备由于引入了驱动器导致整体结构重量上升,增加使用者负担。由于大部分有源式助力设备采用电机作为动力设备,同时需要大减速比的减速装置进行驱动力的放大,导致可穿戴的设备尺寸较大,也不利于使用者移动,虽然一部分助力设备将驱动器与使用者分离,外置于地面上,但这种分离式的有源助力设备限制了使用者的活动范围。
[0003]
并且无论是有源式设备还是无源式设备,大多数可穿戴设备都只实现了踝关节的背屈方向上的自由度,限制了其他方向上的运动,一方面人体踝关节具有十分复杂的运动形式,在行走时也伴随有其他方向上的运动,绝不是单一自由度运动的形式;另一方面,由于穿戴设备的关节运动瞬心与人体踝关节的运动瞬心无法完全重合,存在一定的偏差,这就导致使用者在行走时具有一定的不适感,无法达到更好的助力效果。
[0004]
由上述现有的各类踝关节助力设备可知,如何提供更大的单位质量的驱动力的同时减轻使用者的不适感渐渐成为辅助行走领域中亟待解决的问题之一。
技术实现要素:
[0005]
本发明提供一种基于双绞线驱动的张拉柔性踝关节穿戴助力设备,该助力设备将双绞线引入踝关节助力机构,以解决采用电机驱动时需要搭配大减速比系统引起的质量和尺寸偏大的问题,搭配特制的柔性关节,能减轻由对心不齐所带来的不适感,以解决上述背景技术中所提到的问题。
[0006]
一种基于双绞线驱动的张拉柔性踝关节穿戴助力设备,包括脚部支撑板、柔性关节、脚踝穿戴组件,所述柔性关节下端与脚踝穿戴组件相连,所述柔性关节上端与绞线驱动部分相连,所述脚部支撑板与穿戴者的足部通过绑带固定连接,所述脚部支撑板和万向铰轴承连接。
[0007]
进一步地,所述绞线驱动部分包括电机固定板,所述电机固定板上安装电机,所述电机下端连接联轴器,所述联轴器与主动轴相连,所述主动轴上固定连接有齿轮ii,所述主动轴固连有绞线环ii,所述齿轮ii与齿轮i啮合连接,所述齿轮i通过小轴承座与从动轴连接,所述齿轮i下端固定有大轴承座一端,所述大轴承座另一端连接绞线环i。
[0008]
进一步地,所述柔性关节包括足部连接板连接,所述足部连接板与小腿连接板通
过软体材料连接,所述软体材料中设置有弹性限位杆i和弹性限位杆ii,所述小腿连接板通过两颗螺栓与小腿固定板固连。
[0009]
进一步地,所述小腿固定板上两侧设置有绑带iv和绑带v。
[0010]
进一步地,所述绞线驱动部分末端与双绞线一端连接,所述绞线驱动部分的另一端固定于脚部支撑板上的勾环之中。
[0011]
进一步地,所述脚部支撑板在脚背部分设置有绑带ii和绑带iii,所述脚部支撑板在脚后跟部位设置有绑带i。
[0012]
进一步地,所述柔性关节能实现三个自由度上的旋转运动,并且能实现三个方向上有限的平动自由度,配合关节外部封装浇筑的软体材料及内部的限位弹性杆i与限位弹性杆ii,能实现一定的能量储存功能,当某一方向上的运动幅度过大时,限位弹性杆i与限位弹性杆ii随着运动幅度的增大,提供的回复力可以有效的阻止某一方向上的形变过大所引起的关节损伤。
[0013]
进一步地,所述柔性关节和万向铰之间也设置有轴承,通过改变四组双绞线的长度进而带动柔性关节和万向铰的旋转,驱动足部实现相应的运动。
[0014]
双绞线传动部分则利用两条平行的高强度细线,通过电机绕二者中线为轴旋转,形成类似于双螺旋形状的结构,由于细线被扭转后在轴线方向上发生收缩,并且绞制时具有类似于传统减速机构的特性,能实现驱动力的放大,所以能实现肌肉收缩的特性,反之则能实现肌肉的松弛运动。前后两条双绞线配合扭转,则能实现两组肌肉间的配合运动,实现脚部支撑板的运动。
[0015]
通过固定于脚踝穿戴组件两侧的两组驱动设备带动四条双绞线进行配合运动,能实现踝关节的背屈、跖屈、内旋、外旋方向上的自由度。当两侧靠近脚跟部分的双绞线由驱动部分带动松弛时,由于通过齿轮传动,靠近脚趾的两条双绞线会与前述双绞线运动情况相反,实现收缩运动,进而完成踝关节的背屈运动,反之则能够实现踝关节相应的跖屈运动。而当内侧电机带动靠近脚趾位置的双绞线收缩,靠近脚跟部分的双绞线松弛时,外侧电机运动情况与之相反,带动靠近脚趾部分双绞线松弛,靠近脚跟部分双绞线收缩时,会产生垂直于脚板平面的力矩,进而带动踝关节实现内旋运动,反之则能实现踝关节的外旋运动。
[0016]
综上所述,由于采用了上述技术方案,本发明的有益效果是:
[0017]
1.本发明中,采用了新型的绳驱动方式,利用在绞线过程中所具有的减速、放大驱动力这一特性,去除了传统机械减速装置,大大降低了穿戴设备的整体质量和尺寸,减轻了穿戴者的负担。
[0018]
2.本发明中,采用了新型的柔性关节,能实现多个方向上的自由度,具有极高的灵活性。
[0019]
3.本发明中,允许使用者踝关节进行一定小范围内的自由运动,能有效解决关节对心不齐的现象,减轻了由上述问题所引起的使用者穿戴时的不适感。
[0020]
4.本发明中,通过采用弹性杆件,一方面能实现一定的储能作用,实现了有源助力和无源助力二者的混合串联,另一方面由于引入了弹性杆件,可以限制某一方向上运动幅度过大的情况,避免由外力对穿戴者踝关节引起的损伤。
[0021]
5.本发明中,结构简单,易于操作,使用方便。
附图说明
[0022]
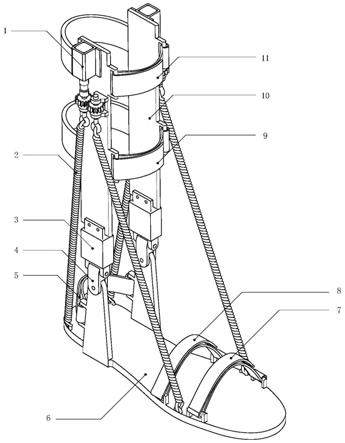
图1为本发明整体结构示意图;
[0023]
图2为本发明脚部支撑板结构示意图;
[0024]
图3为本发明脚踝穿戴组件结构示意图;
[0025]
图4为本发明柔性关节轴测装配示意图;
[0026]
图5为本发明绞线驱动系统装配示意图。
[0027]
附图标记:1-绞线驱动系统、101-电机、102-电机固定板、103-联轴器、104
-ꢀ
从动轴、105-小轴承座、106-齿轮i、107-大轴承座、108-绞线环i、109-绞线环ii、110-齿轮ii,111-主动轴、2-双绞线、3-柔性关节、301-足部连接板、302
-ꢀ
弹性限位杆i、303-弹性限位杆ii、304-软体材料、305-小腿连接板、4-万向铰、 5-绑带i、6-脚部支撑板、7-绑带ii,8-绑带iii、9-绑带iv、10-小腿固定板、11 绑带v。
具体实施方式
[0028]
如图1-5所示,一种基于双绞线驱动的张拉柔性踝关节穿戴助力设备,包括脚部支撑板6、柔性关节3、脚踝穿戴组件,所述柔性关节3下端与脚踝穿戴组件相连,所述柔性关节3上端与绞线驱动部分1相连,所述脚部支撑板6与穿戴者的足部通过绑带固定连接,所述脚部支撑板6和万向铰4轴承连接。
[0029]
所述绞线驱动部分1包括电机固定板102,所述电机固定板上安装电机101,所述电机101下端连接联轴器103,所述联轴器103与主动轴111相连,所述主动轴111上固定连接有齿轮ii110,所述主动轴111固连有绞线环ii109,所述齿轮ii110与齿轮i106啮合连接,所述齿轮i106通过小轴承座105与从动轴 104连接,所述齿轮i106下端固定有大轴承座107一端,所述大轴承座107另一端连接绞线环i108。
[0030]
所述柔性关节3包括足部连接板301连接,所述足部连接板301与小腿连接板305通过软体材料304连接,所述软体材料304中设置有弹性限位杆i302和弹性限位杆ii303,所述小腿连接板305通过两颗螺栓与小腿固定板10固连。
[0031]
所述小腿固定板10上两侧设置有绑带iv9和绑带v11。
[0032]
所述绞线驱动部分1末端与双绞线2一端连接,所述绞线驱动部分1的另一端固定于脚部支撑板6上的勾环之中。
[0033]
所述脚部支撑板6在脚背部分设置有绑带ii7和绑带iii8,所述脚部支撑板 6在脚后跟部位设置有绑带i5。
[0034]
所述柔性关节3能实现三个自由度上的旋转运动,并且能实现三个方向上有限的平动自由度,配合关节外部封装浇筑的软体材料304及内部的限位弹性杆 i302与限位弹性杆ii303,能实现一定的能量储存功能,当某一方向上的运动幅度过大时,限位弹性杆i302与限位弹性杆ii303随着运动幅度的增大,提供的回复力可以有效的阻止某一方向上的形变过大所引起的关节损伤,整个柔性关节外部的制作,是通过将上述部件放入特质的模具中,浇筑软体硅胶封装制成,由于在硅胶固化后为固体,故可以将所有部件固定后,又能实现一定范围内的运动,所以将其用于模拟人体踝关节部分。
[0035]
所述柔性关节3和万向铰4之间也设置有轴承,通过改变四组双绞线2的长度进而带动柔性关节3和万向铰4的旋转,驱动足部实现相应的运动。
[0036]
如图1-5所示,在实际助力过程中,当驱动电机101顺时针(从输出端面看) 启动时,带动联轴器103和与联轴器103相连的主动轴111顺时针旋转,而此时与主动轴111固连的绞线环ii109也做顺时针转动,由此带动一组双绞线2收缩,而由于从动轴104通过齿轮i106与固连在主动轴111上的齿轮ii110存在啮合关系,所以此时从动轴104与主动轴111旋转方向相反,逆时针旋转,带动与之相连的绞线环i108逆时针旋转,由此带动另一组双绞线2舒张。当使用者进行跖屈运动时,双侧的电机101同时顺时针旋转,则与主动轴111相连的双绞线2收缩,从动轴104上双绞线舒张,实现对应的跖屈运动。而当两侧电机101同时逆时针旋转时,主动轴111上双绞线2舒张,从动轴104上双绞线 2收缩,实现背屈运动。而当外侧的电机101顺时针旋转,内侧电机101逆时针旋转时,外侧靠近脚跟部的双绞线2和内侧靠近脚趾部分的双绞线2同时收缩,外侧靠近脚趾部分双绞线2和内侧靠近脚跟部分双绞线2舒张,在垂直于当前脚底平面的轴线方向上产生力矩,带动脚踝实现内翻运动。反之当外侧的电机101逆时针旋转,内侧电机101顺时针旋转时,外侧靠近脚跟部的双绞线2和内侧靠近脚趾部分的双绞线2同时舒张,外侧靠近脚趾部分双绞线2和内侧靠近脚跟部分双绞线2收缩,实现脚踝外翻的运动。
[0037]
在上述运动过程中,由于柔性关节3内含有软体材料304,且踝关节旋转主要也发生在柔性关节3部分,所以一方面可以将行走过程中电机输出的部分能量进行储存,在蹬地发力阶段释放,实现无源式助力的效果,搭配电机的控制,能实现更好的助力效果。并且柔性踝关节结构较为简单,并且能实现多个方向上的自由度,充分的满足了人体踝关节运动的需要,在助力的同时,并没有过多的限制踝关节的运动,减轻了使用者穿戴不适感。
[0038]
如上即为本发明的实施例,上述实施例以及实施例中的具体参数仅是为了清楚表述发明的验证过程,并非用以限制本发明的专利保护范围,本发明的专利保护范围仍然以其权利要求书为准,凡是运用本发明的说明书及附图内容所作的等同结构变化,同理均应包含在本发明的护范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1