基于运动想象的多自由度协同运动上肢外骨骼指令方法与流程
[0001]
本发明属于脑机接口技术领域,尤其是一种基于运动想象的多自由度协同运动上肢外骨骼指令方法。
背景技术:
[0002]
上肢外骨骼系统主要包括可穿戴于人手上的外骨骼机械臂、传感器、控制器以及执行装置,通过对人的上肢运动想象的精确分析而产生控制信号对机械臂的状态进行控制。目前多自由度协同运动上肢外骨骼系统已应用于上肢康复训练,该机械臂具有如下6种形式的协同运动:肩部内旋/外旋、肩部上摆/下摆、大臂内旋/外旋、肘部屈/伸、小臂内旋/外旋、腕关节翻转,并且具有高度可调的支架,可使外骨骼系统适用于受试者站姿与坐姿状态的康复训练。
[0003]
运动想象是一种特殊的大脑工作状态,它可以引起运动神经中枢的兴奋,但不涉及任何的真实动作,对于丧失了运动能力的人来说,这提供了重新获得运动能力的可能。将运动想象方法应用于上肢外骨骼系统后,受试者通过主动的想象动作类型,经过脑-机接口设计转换成对上肢外骨骼的控制信号,有利于整个运动过程中对受试者主动运动意识的激励,加速上肢运动功能的恢复。目前,对基于运动想象的上肢外骨骼的控制指令大部分都是借助机器学习所筛选的特征向量加以控制识别,其控制识别过程较为复杂,耗时较长。
技术实现要素:
[0004]
本发明的目的在于克服现有技术的不足,提出一种设计合理、实时性强且控制准确的基于运动想象的多自由度协同运动上肢外骨骼指令方法。
[0005]
本发明解决其技术问题是采取以下技术方案实现的:
[0006]
一种基于运动想象的多自由度协同运动上肢外骨骼指令方法,包括以下步骤:
[0007]
步骤1、建立包括运动想象脑电采集模块、脑电响应预处理模块、上肢外骨骼控制器和上肢外骨骼机械臂的多自由度协同运动上肢外骨骼控制系统;
[0008]
步骤2、运动想象脑电采集模块持续采集受试者的脑电运动想象响应信号,并存储脑电信号中的眨眼信号时间时刻点,当在设定时间范围内检测到眨眼信号,则进入步骤3;否则进入步骤6;
[0009]
步骤3、判断当前脑电运动想象响应信号是否符合手部运动想象放电活动模板或腿部运动想象放电活动模板,若符合手部运动想象放电活动模板时,进入步骤4;若符合腿部运动想象放电活动模板时,进入步骤5;否则返回步骤2;
[0010]
步骤4、依次处理前后顺序的运动想象脑电响应信号的幅值并进行分析,生成上肢外骨骼肩部电机输出上摆指令或上肢外骨骼肩部电机输出下摆指令,并将生成的指令发送给上肢外骨骼控制器;
[0011]
步骤5、依次处理前后顺序的运动想象脑电响应信号的幅值并进行分析,生成上肢外骨骼肩部电机输出外展指令或上肢外骨骼肩部电机输出内收指令,并将生成的指令发送
给上肢外骨骼控制器;
[0012]
步骤6、判断当前先后接续的两个脑电运动想象响应信号是否满足“先手部再腿部”的判定规则,生成上肢外骨骼肘部电机输出屈指令或上肢外骨骼肘部电机输出伸指令,并将生成的指令发送给上肢外骨骼控制器;
[0013]
步骤7、上肢外骨骼控制器接收指令并控制上肢外骨骼机械臂动作,上肢外骨骼机械臂执行指令并将执行结果反馈给运动想象脑电采集模块。
[0014]
进一步,所述运动想象脑电采集模块由脑电信号放大器、脑电信号检测与存储设备、实验刺激展示设备和脑电帽构成,所述脑电帽戴在受试者头部,用于检测人脑各个区域的脑电信号,在人的左眼垂直位置处各贴一个眨眼信号测量电极,所述脑电帽与脑电信号放大器连接,将所采集的脑电信号进行放大并传送给脑电信号检测与存储设备,脑电信号放大器两端分别连接实验刺激展示设备和脑电信号检测与存储设备,设备间通过并口和/或usb方式进行通信传输。
[0015]
进一步,所述手部运动想象放电活动模板、腿部运动想象放电活动模板均通过训练方式获得。
[0016]
进一步,所述步骤3在判断前还包括对当前脑电运动想象响应信号进行滤波、分段、基线校正、信号伪迹去除和重参考的预处理步骤。
[0017]
进一步,所述步骤4生成上肢外骨骼肩部电机输出上摆指令或上肢外骨骼肩部电机输出下摆指令的方法为:依次处理前后顺序的运动想象脑电响应信号的幅值,其中前一个动作响应幅值a
f
,后一个的动作响应幅值为a
s
,使用前一个的幅值减去后一个的幅值得到差值a=a
f-a
s
;设定肘部的权重系数为b
e
,设定肩部的权重系数为b
s
,在运动范围上设定活动角度c;令i1=a*b
e
*c,i2=a*b
s
*c;如果断i1+i2的符号为正时,则生成上肢外骨骼肩部电机输出上摆指令,为负时则生成上肢外骨骼肩部电机输出下摆指令。
[0018]
进一步,所述步骤5产生上肢外骨骼肩部电机输出外展指令和上肢外骨骼肩部电机输出内收指令的方法为:依次处理前后顺序的运动想象脑电响应信号的幅值,其中前一个动作响应幅值a
f
,后一个的动作响应幅值为a
s
,使用前一个的幅值减去后一个的幅值得到差值a=a
f-a
s
;设定肘部的权重系数为b
e
,设定肩部的权重系数为b
s
,在运动范围上设定活动角度c;令i1=a*b
e
*c,i2=a*b
s
*c。判断i1+i2的符号,为正时则生成上肢外骨骼肩部电机输出外展指令,为负时则生成上肢外骨骼肩部电机输出内收指令,其活动角度为c值大小。本步骤生成的指令发送给上肢外骨骼控制器。
[0019]
进一步,所述步骤6在判断前还包括对当前脑电运动想象响应信号进行滤波、分段、基线校正、信号伪迹去除和重参考的预处理步骤。
[0020]
进一步,所述步骤6生成上肢外骨骼肘部电机输出屈指令和上肢外骨骼肘部电机输出伸指令的方法为:判断是否符合首先满足手部运动想象脑电活动模板,再满足腿部运动想象脑电活动模板,当不符合时,返回步骤2;当符合时,依次处理前后顺序的运动想象脑电响应信号的幅值,其中前一个动作响应幅值a
f
,后一个的动作响应幅值为a
s
,使用前一个的幅值减去后一个的幅值得到差值a=a
f-a
s
,设定肘部的权重系数为b
e
,设定肩部的权重系数为b
s
。在运动范围上设定活动角度c,判断i1+i2的符号,为正时则生成上肢外骨骼肘部电机输出屈指令,为负时则生成上肢外骨骼肘部电机输出伸指令。
[0021]
进一步,所述活动角度c为:肘部屈/伸的活动变化范围为0
°
至150
°
之间,肩部上/
下摆动的活动变化范围可为0
°
至210
°
之间,肩部内收/外展的活动变化范围可为0
°
至180
°
。
[0022]
本发明的优点和积极效果是:
[0023]
本发明基于肢体多部位联合运动想象的规律,充分利用脑电信号中常视为噪声的眨眼信号产生排列组合,联合了固定频率下的眨眼信号,采用手、脚动作想象和眨眼的不同先后顺序来形成执行指令,完成对多自由度协同运动上肢外骨骼系统的控制,具有组合动作类型少、信号稳定、控制指令产生时间短、适用范围广泛等特点,并且对所有的受试者均适用,解决了多自由度协同运动上肢外骨骼系统动作类型的控制问题,为基于运动想象的混合模式上肢外骨骼两关节控制指令提供了一种决策办法,为基于运动想象的脑-机接口技术决策提供了一种新思路。
附图说明
[0024]
图1为本发明基于运动想象的多自由度协同运动上肢外骨骼控制系统图;
[0025]
图2为眨眼动作脑电采集位置示意图;
[0026]
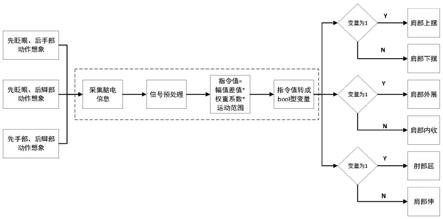
图3为执行指令组合的示意图;
[0027]
图4为基于运动想象的多自由度协同运动上肢外骨骼控制指令处理过程示意图。
具体实施方式
[0028]
以下结合附图对本发明做进一步详述。
[0029]
本发明的设计思想包括两部分内容:(1)想象包含两个关节共六种动作指令:以肩部开合、肩部上下和肘部屈伸为例,收集不同先后顺序下完成两个动作想象所产生的脑电响应及固定频率的眨眼信号并进行处理。(2)依照不同先后顺序三种动作信号产生的不同符号差值,与运动能力权重系数、运动范围连续乘积后形成一个执行指令,设备接收到该指令后便可进行控制,三动作经过两两组合可以完成六种控制指令。
[0030]
基于上述说明,本发明提供一种基于运动想象的多自由度协同运动上肢外骨骼指令方法,包括以下步骤:
[0031]
步骤1、建立多自由度协同运动上肢外骨骼控制系统并完成前期准备工作。
[0032]
在本步骤中,建立如图1所示的多自由度协同运动上肢外骨骼控制系统。该系统包括运动想象脑电采集模块、脑电响应预处理模块、上肢外骨骼控制器及负责执行功能的上肢外骨骼机械臂四部分。上述四部分循环依次连接在一起。
[0033]
运动想象脑电采集模块和执行机械臂部分所涉及的设备均可从相关市场进行采购,脑电响应预处理模块借助matlab和/或python等编程工具可实现。
[0034]
所述运动想象脑电采集模块可由脑电信号放大器、脑电信号检测与存储设备、实验刺激展示设备、以及脑电帽等脑电采集设备组成。脑电帽戴在受试者头部,用于检测人脑各个区域的脑电信号。所述脑电帽与信号放大器连接,将所采集的脑电信号进行放大,便于观测和数据预处理,脑电信号放大器两端分别连接前面所述的实验刺激展示设备和脑电信号检测与存储设备,设备间通过并口和/或usb等方式进行通信传输。
[0035]
此外,为了测定眨眼信号及消除眼动引起的信号干扰,在人的左眼垂直位置处各贴一个电极采集人的眼动信号,如图2所示。在后续的数据处理中,可使用包括滤波在内的各种信号处理方法将眼动干扰消除。
[0036]
系统建立后,进行系统环境配置以及前期准备:给受试者者介绍实验,概括介绍实验目的,实验过程,训练的具体内容及细节。让受试者者进行训练,训练时长可为15min。训练过程中需测定受试者单独进行手部或腿部动作想象时的脑电响应模板。
[0037]
给受试者贴上电极,戴脑电帽,注射导电膏,将脑电检测设备各个通道阻抗均降到合理范围,如:11.5kω以下。
[0038]
通过以上步骤完成系统整体搭建过程,进入正式运动想象驱动上肢外骨骼系统阶段。
[0039]
步骤2、进入运动想象驱动上肢外骨骼系统阶段后,运动想象脑电采集模块将持续地获得受试者的脑电运动想象响应信号,并存储脑电信号中的眨眼信号时间时刻点,如图3及图4所示。
[0040]
由于在眨眼时,脑电中会出现特定的活动模式,因此,将眨眼时的特定脑电活动模式简称成为眨眼信号。在本步骤中,采集的脑电运动想象响应信号包括固定频率的眨眼信号。在本实施例中,采用2hz的典型频率。
[0041]
当在一定时间范围t内(例如:本实施例中可设定为1s内)检测到眨眼信号,则判定进入步骤3;当在一定时间范围t内(例如:本实施例中可设定为1s内)没有检测到眨眼信号,则判定进入步骤6。
[0042]
步骤3、脑电响应预处理模块对脑电信号进行进一步预处理,包括但不限于滤波、分段、基线校正、信号伪迹去除、重参考等操作。完成预处理后,判断当前脑电运动想象响应信号是否符合手部或腿部运动想象放电活动模板。若符合手部运动想象放电活动模板时,进入步骤4;若符合腿部运动想象放电活动模板时,进入步骤5;若均不符合时,返回步骤2。
[0043]
步骤4、依次处理前后顺序的运动想象脑电响应信号的幅值,其中前一个动作响应幅值a
f
,后一个的动作响应幅值为a
s
,使用前一个的幅值减去后一个的幅值得到差值a=a
f-a
s
。由于肘部与肩部的运动能力存在较大差别,可预先设定肘部的权重系数为b
e
(例如:1),设定肩部的权重系数为b
s
(例如:3)。在运动范围上设定活动角度c,根据实际实施情况,肘部屈/伸的活动变化范围可为[0
°
,150
°
],肩部上/下摆动的活动变化范围可为[0
°
,210
°
],肩部内收/外展的活动变化范围可为[0
°
,180
°
]。令i1=a*b
e
*c,i2=a*b
s
*c。判断i1+i2的符号,为正时则生成上肢外骨骼肩部电机输出上摆指令,其活动角度为c值大小;为负时则生成上肢外骨骼肩部电机输出下摆指令,其活动角度为c值大小。本步骤生成的指令发送给上肢外骨骼控制器。
[0044]
步骤5、依次处理前后顺序的运动想象脑电响应信号的幅值,其中前一个动作响应幅值a
f
,后一个的动作响应幅值为a
s
,使用前一个的幅值减去后一个的幅值得到差值a=a
f-a
s
。由于肘部与肩部的运动能力存在较大差别,可预先设定肘部的权重系数为b
e
(例如:1),设定肩部的权重系数为b
s
(例如:3)。在运动范围上设定活动角度c,根据实际实施情况,肘部屈/伸的活动变化范围可为[0
°
,150
°
],肩部上/下摆动的活动变化范围可为[0
°
,210
°
],肩部内收/外展的活动变化范围可为[0
°
,180
°
]。令i1=a*b
e
*c,i2=a*b
s
*c。判断i1+i2的符号,为正时则生成上肢外骨骼肩部电机输出外展指令,其活动角度为c值大小;为负时则生成上肢外骨骼肩部电机输出内收指令,其活动角度为c值大小。本步骤生成的指令发送给上肢外骨骼控制器。
[0045]
步骤6、对脑电信号进行进一步预处理,包括但不限于滤波、分段、基线校正、信号
伪迹去除、重参考等操作。完成预处理后,判断当前先后接续的两个脑电运动想象响应信号是否满足“先手部再腿部”的判定规则,即:首先满足手部运动想象脑电活动模板,再满足腿部运动想象脑电活动模板。当不符合时,返回步骤2;当符合时,依次处理前后顺序的运动想象脑电响应信号的幅值,其中前一个动作响应幅值a
f
,后一个的动作响应幅值为a
s
,使用前一个的幅值减去后一个的幅值得到差值a=a
f-a
s
。由于肘部与肩部的运动能力存在较大差别,可预先设定肘部的权重系数为b
e
(例如:1),设定肩部的权重系数为b
s
(例如:3)。在运动范围上设定活动角度c,根据实际实施情况,肘部屈/伸的活动变化范围可为[0
°
,150
°
],肩部上/下摆动的活动变化范围可为[0
°
,210
°
],肩部内收/外展的活动变化范围可为[0
°
,180
°
]。令i1=a*b
e
*c,i2=a*b
s
*c。判断i1+i2的符号,为正时则生成上肢外骨骼肘部电机输出屈指令,其活动角度为c值大小;为负时则生成上肢外骨骼肘部电机输出伸指令,其活动角度为c值大小。本步骤生成的指令发送给上肢外骨骼控制器。
[0046]
步骤7、上肢外骨骼控制器接收指令并控制上肢外骨骼机械臂动作,上肢外骨骼机械臂并将执行结果反馈给运动想象脑电采集模块。运动指令执行完毕后返回步骤2。
[0047]
在本发明中,利用了传统上视作噪声的脑电信号中的眨眼信号,与手部和腿部具有明显差异的运动想象脑电信号,进行排列组合,具有训练时间短、训练方式简单的特点,可与多自由度上肢外骨骼机械臂进行联动,对受试者的肘关节、肩关节进行协同训练,简单易行。通过试验证明,单次采样在1-2s内即可完成,对于上肢外骨骼的实时动作控制起到了正向的引导作用,具有重要的应用价值。
[0048]
需要强调的是,本发明所述的实施例是说明性的,而不是限定性的,因此本发明包括并不限于具体实施方式中所述的实施例,凡是由本领域技术人员根据本发明的技术方案得出的其他实施方式,同样属于本发明保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1