一种用于心血管介入手术的救护车式移动导管室的制作方法
[0001]
本发明涉及移动导管室,尤其涉及一种用于心血管介入手术的救护车式移动导管室。
背景技术:
[0002]
目前,治疗急性心肌梗死最有效的方式是采用冠状动脉介入手术方法快速开通梗死相关冠状动脉血管,而冠状动脉介入手术需要在具有心血管造影x射线机等相关介入设备的介入导管室条件下进行。目前国内外现有治疗急性心肌梗死的诊治模式,均是将患者转运到具有血管介入导管室的医院进行血管介入开通血管诊治,但是,统计显示约50%急性心肌梗死病员在到达前途中死亡。目前,所研究具有介入导管室功能的车载移动方舱,虽然能够实现把设备及介入术者送达患者诊治现场,但是由于方舱系统体积较大,且手术前展开地域较大,展开时间及术后收拢时间较长,并在运送途中,不能随根据患者病情“即时”实施手术抢救,这种介入手术方舱对于随机地域急性心肌梗死患者的诊治做不到及时诊治。
[0003]
亟待出现一种微型的机动性好、集成度高、操控性强、响应速度快的心血管介入导管室,可以快速到达急性心肌梗死患者病发现场,在现场快速展开,对患者“即时”开展微创介入手术诊治,同时具有在送运医院途中,根据病情能够随时进行介入手术,保证患者的生命体征的功能。
技术实现要素:
[0004]
本发明就是针对现有技术存在的缺陷,提供一种用于心血管介入手术的救护车式移动导管室,其一种心脏与血管急重伤病野战快速微创介入诊治方舱,使心血管急重症介入诊治设备能够做到展开迅速、机动灵活、适应性强,为心血管诊治介入手术人员对病员进行及时诊治提供硬件设备。
[0005]
为实现上述目的,本发明采用如下技术方案,包括救护车,其特征在于,救护车内设置有抗菌内环境、机器人血管造影机系统、无线医疗物联网系统、自发电系统、辅助系统。
[0006]
进一步地,所述救护车由底盘与车厢构成,底盘为长轴底盘,用于装配(大功率)发动机及自发电系统;车厢与底盘活动连接。
[0007]
更进一步地,所述车厢外壁与内饰中间夹层设置铅板,车厢窗户、厢体、驾驶室的窗户均采用铅玻璃。
[0008]
进一步地,所述车厢内部装配有仪器箱、器械箱、器械车,车厢内部具有层流装置、净化空调、暖风机、氧气供应系统、水供应系统、视频传输设备。
[0009]
进一步地,所述机器人血管造影机系统由机器人上臂(上机械臂式机器人)、机器人下臂(下机械臂式机器人)、机器人控制器与影像链系统构成。
[0010]
更进一步地,上机械臂式机器人、下机械臂式机器人均采用七自由度机械臂,上机械臂式机器人的末端与球管相连,下机械臂式机器人的末端与平板探测器相连,上机械臂式机器人固定在车厢顶部,下机械臂式机器人固定在车厢底部。
[0011]
更进一步地,所述机器人控制器根据x射线在平板探测器的影像数据实现机器人端部对中心的调整及校准。
[0012]
更进一步地,所述影像链系统由球管、平板探测器、高压发生器、医疗显示器及工作站构成;其中高压发生器、医疗显示器及工作站的软件控制与机器人控制器匹配应用。
[0013]
进一步地,所述辅助系统由急救担架/介入综合床、心电图机、手提超声、除颤监护仪、有创血压监护、车载iabp。
[0014]
进一步地,所述自发电系统包括发电机装置、变速箱;发电机装置包括皮带取力行车,变速箱包括驻车发电机装置。
[0015]
进一步地,所述抗菌内环境包括层流净化(设备)、紫外线杀菌灯及抗菌材料内壁。
[0016]
进一步地,所述无线医疗物联网系统由医学数据采集终端、车厢内摄像头及医学监测设备构成,厢体内实体场景音像与医疗设备监测信息经由数据采集终端采集后,实现无线远程数据交互。
[0017]
与现有技术相比本发明有益效果。
[0018]
为实现心脏与血管系统急重伤病诊治关口的整体前移,本发明提供一种心脏与血管急重伤病野战快速微创介入诊治方舱,使心血管急重症介入诊治设备能够做到展开迅速、机动灵活、适应性强,为心血管诊治介入手术人员对病员进行及时诊治提供硬件设备。
附图说明
[0019]
下面结合附图和具体实施方式对本发明做进一步说明。本发明保护范围不仅局限于以下内容的表述。
[0020]
图1是本发明整体结构示意图。
[0021]
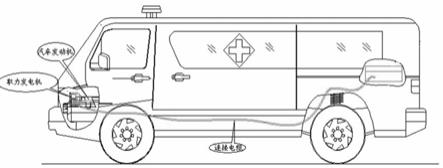
图2-3是本发明整车外部布置图。
[0022]
图4-5是本发明车厢内布置图。
[0023]
图6-1到6-2是本发明机器人上臂关节结构示意图。
[0024]
图7-1到7-2是本发明上臂一二关节结构示意图。
[0025]
图7-3是本发明图7-1的a-a示意图。
[0026]
图8是本发明上臂三、四关节连接示意图。
[0027]
图9是本发明上臂三关节连接示意图。
[0028]
图10是本发明上臂四关节连接示意图。
[0029]
图11-1到11-2是5-6-7关节结构示意图。
[0030]
图12-1-图12-2是本发明机器人下臂关节结构示意图。
[0031]
图13是本发明下臂一二关节示意图。
[0032]
图14是本发明下臂三关节示意图。
[0033]
图15-1到15-2是本发明下臂四五关节示意图。
[0034]
图15-3是图15-2的a-a示意图。
[0035]
图16-1是下臂6到7关节结构示意图。
[0036]
图16-2是图16-1的a-a 示意图。
[0037]
图中,1为机器人上臂、2为机器人下臂、3为操作台、4为折叠桌、5为洗手液盒、6为影像链系统、7为折叠单人座椅、8为吊柜、9为设备固定模块、10为移动射灯、11为照明灯带、
12为输液吊钩、13为信号口、14为电源口、15为上车踏板、16为隔墙、17为电动绞盘、18为蓝色转式警灯警报器、19为空调、20为长条形警灯、21为红十字标识、22为后门备胎、23为电动洗手池、24为水箱、25为供电系统、26为层流净化设备、27为药品箱、28为电瓶、29为氧气瓶。
具体实施方式
[0038]
如图1到16-2所示,作为一种具体实施例:本发明包括救护车、机器人血管造影机系统、辅助设备系统、自发电系统、无线医疗物联网系统、抗菌内环境等。
[0039]
救护车具有操作台、折叠桌、洗手液盒、影像链系统、折叠单人座椅、吊柜、移动射灯、照明灯带、输液吊钩、信号口、电源口、上车踏板、楼梯担架、隔墙、电动绞盘、电动洗手池、水箱、供电系统、层流净化设备、药品箱、电瓶、逆变电源、氧气瓶。
[0040]
吊柜内用于容纳设备固定模块。
[0041]
救护车外设置蓝色转式警灯警报器、空调、长条形警灯、红十字标识、后门备胎、后双开门。
[0042]
本实施例中,所述救护车由底盘与车厢构成,底盘为长轴底盘,装配大功率发动机及自发电系统。车厢与底盘为活动可调整连接。
[0043]
本实施例中,所述车厢底部四周设置电动伸缩支撑平衡系统。所述车厢外壁与内饰中间夹层设置铅板,四周窗户及厢体与驾驶室隔壁装置铅玻璃。
[0044]
本实施例中,所述厢体内部装置仪器箱、器械箱、器械车等辅助设备,车厢内部具有层流装置、净化空调、暖风机、氧气供应系统、水供应系统、视频传输等装置。
[0045]
本实施例中,所述机器人血管造影机系统由上下机器臂式两机器人、控制器与影像链系统构成。
[0046]
本实施例中,上下机器人为七自由度机械臂(机器人上臂、机器人下臂),端部分别固定球管及平板探测器,根部分别固定在车厢顶部及车厢底部,其运动姿态均为端部对中心使用。
[0047]
上臂端部与血管造影机的平板探测器相连,下臂端部与血管造影机的阳极球管相连。通过上、下臂的运动,实现大范围内、不同角度、不同等中心距离的等中心检测,为微创手术过程中提供高质量的造影图像。
[0048]
本实施例中,所述机器人上臂、机器人下臂均具有七自由度,包括七自由度模块。
[0049]
本实施例中,上臂七自由度模块包括一二关节直线运动模块、三四关节模块、五六七关节模块。
[0050]
本实施例中,上臂七自由度模块的一二关节直线运动模块包括一轴关节直线模组31、设置于一轴关节直线模组31上的二轴基座32;一轴关节直线模组输出端33带动二轴基座32运动,二轴基座32上设置有二轴导轨34,二轴导轨34上滑动连接有二轴滑块35,二轴滑块35通过二轴带轮36传递力给丝杠螺母副,二轴带轮36采用同步带结构,且该同步带结构由二轴电机310带动;二轴丝杠37两端通过二轴推力轴承311支承于二轴基座32,二轴螺母38与二轴滑块35连接。其中,一轴关节直线模组采用一轴导轨、与一轴导轨滑动相连的一轴滑块,并由一轴电机39驱动来实现,在此不赘述。
[0051]
具体地,一关节的内部结构形式与二关节类似,不赘述,一关节通过一轴直线模组输出端带动二轴基座运动,同时一轴导轨起支撑作用;二关节主要是通过带轮传递力给丝
杠螺母副,丝杠两侧有推力轴承支撑,螺母与两个导轨滑块(起支撑作用)连接,并将运动输出给下一个轴。
[0052]
本实施例中,所述二轴导轨34包括平行设置的二轴导轨一及二轴导轨二。
[0053]
本实施例中,上臂七自由度模块上臂的三四关节模块包括三关节模块、四关节模块;三关节模块包括固设于二轴滑块35上的二轴连接块312,该二轴连接块312一侧连接有弯臂型三轴连杆313,该三轴连杆313的自由端底部安装有三轴电机314,自由端顶部设置有三轴电机连接件315,该三轴电机连接件315通过三轴交叉滚子轴承316与自由端相连,三轴交叉滚子轴承316的外圈与自由端相连,三轴交叉滚子轴承316的内圈与三轴电机314转接件相连,三轴电机314与三轴电机转接件315相连,将运动传递给三轴电机转接件315。
[0054]
四关节模块包括与三轴电机转接件315固接的四关节基座317,四关节基座316内设置有四关节丝杠318,该四关节丝杠318通过轴承座安装于基座316内,该丝杠318与四关节螺母319相连构成丝杠螺母运动副,螺母319与块状四轴连接件320相连,且四关节螺母319与四关节滑块321相连,四关节滑块321与四关节导轨322相连,四关节导轨322设置于基座内且四关节导轨与四关节丝杠相平行;四关节丝杠由带轮传动力给丝杠螺母运动副。其中,带轮传动即采用同步带传动机构,且该同步带传动机构采用四轴电机323作为驱动力。
[0055]
本实施例中,四关节导轨有两个,两个四关节导轨各对应一四关节滑块,且四关节丝杠两侧各分部一四关节导轨。
[0056]
本实施例中,上臂七自由度模块的五六七关节模块包括与四轴连接件相连的五轴连接件361,五轴连接件361与五轴关节模组367的外壳相连,五轴关节模组367的输出轴与六轴连接件362相连,该六轴连接件362还与六轴关节模组363的输出轴相连,六轴关节模组363的外壳与七轴连接件364的输出轴相连,七轴连接件364的外壳与七轴关节模组365的基座相连,七轴关节模组365输出端通过末端连接件368与接收平板366相连。
[0057]
其中,五、六、七轴关节模组均包含空心电机、谐波减速器、抱闸和编码器等,为市售采购件,不赘述。
[0058]
本实施例中,下臂七自由度模块包括一二关节模块、三关节模块、四五关节模块、六七关节模块。
[0059]
本实施例中,下臂七自由度模块的一二关节模块包括一轴直线模组、设置于一轴直线模组上的二关节连接件324,二关节连接件324的底部通过滑块(二关节滑块326)与导轨(二关节导轨327)相连;一轴关节模组带动二关节连接件324沿导轨移动。
[0060]
所述二关节连接件324上设置有二关节基座325,二关节基座325上设置有电缸,电缸的固定部分328固设于二关节基座上,电缸的运动部分329与左右两滑块326相连,两滑块与各自的导轨相连,两导轨竖向设置于二关节基座325上,两滑块均与连接架330固连,连接架330与三关节连接件331相连,电缸动作,带动滑块沿导轨上下移动,与滑块相连的连接架330及连接架330上的三关节连接件331随之移动。
[0061]
具体地,一轴直线模组,和上臂一关节是相同的,内部主要包含电机、减速机、丝杠螺母副以及轴承等,螺母用于将一关节运动传递给下一部分,导轨气支撑作用,电缸运动部分推动连接架上下运动。
[0062]
本实施例中,下臂七自由度模块的三关节模块包括作为三关节连接件331上的三关节基座338,三关节基座338上安装有同步带传动机构,该同步带传动机构的主动带轮337
安装于电机的输出轴上,该电机332通过电机座安装与三关节基座338上,同步带传动机构的从动带轮安装于从动轴335上,该从动轴335通过交叉滚子轴承安装于三关节基座338,从动带轮与四关节连接板333相连,电机转动,通过同步带,从动带轮转动,带动与之相连的四关节连接板333发生转动。
[0063]
本实施例中,下臂七自由度模块的四五关节模块包括作为四关节连接板333的四关节基座(下臂四关节基座346),四关节基座上设置有导轨(下臂四关节基座导轨344),导轨上滑动连接有滑块(下臂四关节基座滑块345),滑块上设置有下臂电机固定座343,电机固定座343上固定有电机(下臂电机348);四关节基座上还设置有电缸固定座347,电缸固定座347上设置有电缸,电缸的固定部分与电缸固定座固连,电缸的移动部分与电机固定座343相连;电缸动作,电缸的移动部分带动电机沿导轨344移动;电机348的电机轴通过联轴器与输出轴3410相连,该输出轴3410通过交叉滚子轴承与电机固定座343转动连接。
[0064]
本实施例中,下臂七自由度模块的六七关节模块包括固接于输出轴自由端的电机模组固定座356,该电机模组固定座356内设置有六关节电机模组357,六关节电机模组357位于底部敞开的口字型七关节连接件353内,六关节电机模组357一侧的连接轴355通过交叉滚子轴承与七关节连接件353相连,六关节电机模组另一侧的连接轴与七关节连接件353固定连接;交叉滚子轴承的外圈与七关节连接件353相连,交叉滚子轴承的内圈与连接轴355相连;(六关节电机模组动作,带动七关节连接件动作;)七关节连接件的顶部固接有球管外壳352,球管外壳352内设置有电机减速器模组358,球管外壳外壁设置有限速器351,该限速器351与电机减速器模组358相连。
[0065]
具体地,358带动351旋转, 355是连接轴(一侧与交叉滚子轴承内圈连接,另一侧与电机模组固定座固定连接)。
[0066]
本发明的目的在于提供全方位冗余双臂构型血管造影机,其包括携带发射头的七自由度下臂、携带接收器的七自由度上臂、固定不动的床体以及可在野战或城市急救环境下工作的移动车体。中心运动,检测位置的改变以及接收器与发射器等中心距离的调整,都是通过上下臂协调配合来实现的。通过车载的方式可以实现野战和城市急救环境下,对伤者或患者的快速救治。
[0067]
本实施例中,所述机器人控制器根据x射线在平板探测器的影像数据实现机器人端部对中心的调整及校准。
[0068]
本实施例中,所述影像链系统由球管、平板探测器、高压发器、医疗显示器及工作站构成。高压发生器、医疗显示器及工作站的软件控制与机器人控制器匹配应用。
[0069]
本实施例中,所述辅助系统由急救担架/介入综合床、心电图机、手提超声、除颤监护仪、有创血压监护、车载iabp等手术专用设备构成。
[0070]
本实施例中,所述自发电系统由皮带取力行车与变速箱取力驻车并联发电技术实现,皮带取力发电机装置在发动机处,驻车发电机装置在变速箱处。
[0071]
本实施例中,所述无线医疗物联网系统由医学数据采集终端与车厢内摄像头及医学监测设备构成,厢体内实体场景音像与医疗设备监测信息经由数据采集终端采集后,实现无线远程数据交互。
[0072]
本实施例中,所述抗菌内环境由层流净化、紫外线杀菌及抗菌材料综合功能构成。
[0073]
本实施例一种用于心血管介入手术的救护车式移动导管室,包括救护车、自发电
系统、血管造影机器人系统、辅助设备系统、无线医疗物联网系统、抗菌内环境等。
[0074]
救护车由底盘与导管室车厢构成,底盘采用大功率发动机及长轴底盘,与自发电系统结合在一起。所述导管室车厢与底盘固定连接为活动连接,连接处有快速固定拆卸结构。所述车厢四壁与顶层设置铅防护层。所述血管造影机器人系统由上下机器臂式两机器人、控制器、影像链系统与综合手术床构成,所述两机器人分别为七自由度机器臂,其端部分别固定球管及平板探测器,根部分别固定在车厢顶部及车厢底部;所述影像链系统由球管、平板探测器、高压发器、医疗显示器及工作站构成;所述综合手术床可具有急救担架床与介入手术床功能。所述辅助设备系统由介入/急救担架、心电图机、手提超声、除颤监护仪、有创血压监护、车载iabp等手术专用设备构成,所述厢体内部装有仪器箱、器械箱、器械车等辅助设备,所述车厢具有层流装置、净化空调、暖风机、氧气供应系统、水供应系统、视频传输等功能。
[0075]
可以理解的是,以上关于本发明的具体描述,仅用于说明本发明而并非受限于本发明实施例所描述的技术方案,本领域的普通技术人员应当理解,仍然可以对本发明进行修改或等同替换,以达到相同的技术效果;只要满足使用需要,都在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1