一种关节置换配准装置及方法与流程
1.本发明涉及图像配准领域,特别是涉及一种关节置换配准装置及方法。
背景技术:
2.图像配准的目的是将带有手术规划路径的虚拟病灶3d模型与术中实际人体进行匹配。其关键步骤是,医生根据导航软件3d模型的提示,通过探针在患者身体内依次采集该模型上的虚拟标记点,利用光学追踪原理获取其位置信号。使用传统探针采集解剖标记点的步骤比较繁琐:一名医生手持探针选取一个标记点后,需由另一名医生用鼠标点击导航监视器上的确认按钮,精度符合系统要求后,才可进入下一个标记点的采集。部分探针技术方案通过踩脚踏板的方式来履行确认的功能。此外,由于虚拟标记点分布于3d模型的不同平面,采集过程中需要经常对3d模型进行翻转,传统技术方案中,也需由另外一名助手通过拖动鼠标的方式翻转屏幕中的虚拟3d模型,从而配合术者完成标记点采集。由于手术配准过程通常需要采集几十个甚至上百个解剖标记点,传统探针的应用方式实时性不高,手眼协调性差,降低了手术效率,延长了手术时间。
技术实现要素:
3.本发明的目的在于解决现有手术配准过程中无法独立完成配准过程,需要助手协助操作带来的手眼不协调、手术效率低、手术时间长的问题,提供了一种关节置换配准装置及方法。
4.本发明通过以下技术方案来实现上述目的:一种关节置换配准装置,与双目视觉系统和计算机上的髋臼窝三维模型软件配合,用于进行病患髋臼窝和所述髋臼窝三维模型间的图像配准,所述配准装置包括手柄和针部,针部设置在所述手柄的下端;所述手柄上设置有第一按钮和第二按钮,所述第一按钮用于确认所述针部的位置,所述第二按钮用于远程控制所述髋臼窝三维模型的旋转;所述手柄内设置有信号功能模块,所述第一按钮、第二按钮均与所述信号功能模块电连接,通过所述信号功能模块与所述计算机上的髋臼窝三维模型软件进行信息交互;所述手柄上表面分布有若干个光学追踪标识,光学追踪标识与所述双目视觉系统配合,用于确定所述针部的位置和所述髋臼窝三维模型的旋转角度。
5.进一步地,所述手柄包括横向设置的第一连接部和竖向设置的第二连接部,第二连接部与第一连接部中部固定连接;所述第二连接部下表面设置有容置腔,所述信号功能模块内置于所述容置腔内;所述第一按钮、第二按钮位于所述容置腔右侧壁处。
6.进一步地,所述手柄上表面分布有4个光学追踪标识,其中两个光学追踪标识位于第一连接部的两端,另外两个光学追踪标识上下分布于第二连接部上表面;将所述4个光学追踪标识中心位置分别标记为a、b、c、d,a、b、c、d四点共面,ab段长度为55mm,ac段长度为115.43mm,ad段长度为139.46mm,bc段长度为65.19mm,bd段长度为87.32mm,cd段长度为74.33mm。
7.进一步地,所述光学追踪标识包括底座,底座上方设有反光片,反光片的四周设置
有喇叭口包围圈。
8.进一步地,所述喇叭口包围圈内表面设有光滑的反射涂层。
9.进一步地,所述双目视觉系统相对所述反光片水平方向偏移为l,l>1500mm;所述双目视觉系统相对所述反光片同向的高度偏移为h2,1500mm<h2<2000mm;所述反光片边缘处与光学追踪器的连线相对水平面的夹角为α,20
°
<α<160
°
,所述反光片边缘处与光学追踪器之间的距离为l2,500mm<l2<2500mm。
10.进一步地,所述喇叭口包围圈相对水平面的夹角为θ,θ<α。
11.进一步地,所述针部依次包括第一过渡段、第二过渡段、第三过渡段以及针尖部,第一过渡段、第二过渡段、第三过渡段以及针尖部的截面宽度依次递减。
12.本申请还提供了一种关节置换配准方法,适用于所述一种关节置换配准装置,包括:s100、通过所述配准装置获取病患髋臼窝n个骨性第一标志点,当所述骨性第一标志点位置与所述髋臼窝三维模型位置符合预期时,通过所述第一按钮进行确认,将所述骨性第一标志点和所述髋臼窝三维模型间进行一次配准;s200、利用所述配准装置依次选取病患髋臼窝m个骨性第二标志点,并通过所述第一按钮进行确认,将所述骨性第二标志点和所述髋臼窝三维模型间进行二次配准,在此过程中,通过所述第二按钮带动所述髋臼窝三维模型旋转,使得待配准位置所在的平面处于所述髋臼窝三维模型的正面。
13.进一步地,所述骨性第一标志点位置、骨性第二标志点位置,通过所述配准装置上的光学追踪标识与所述双目识别系统的相互配合获得。
14.与现有技术相比,本发明的有益效果如下:(1)在与计算机上的髋臼窝三维模型软件配合使用时,医生可直接通过配准装置确认按钮(第一按钮)确认选定的参考点是否适用,通过配准装置旋转拖动按钮(第二按钮)控制髋臼窝三维模型旋转,代替助手通过鼠标在显示器上的操作,可以大大减少医生和助手沟通的时间,简化流程提高效率,同时可减少患者伤口暴露的时间,从而减少整体手术时间,提升手术质量。(2)光学追踪标识采用塑料材料,喇叭口包围圈表面设有光滑的反射涂层,表面光滑,无光学小球表面的颗粒感,术中若被血液或其他杂质污染,可以快速清理,不易磨损,不至影响光学定位与追踪的精度,更具有经济性。(3)针尖和手柄共同构成该配准装置的快拆快装结构,使用者一插一拔即可完成安装和拆卸。针部采用多段过渡结构,实现与针尖部之间的平缓过渡,避免手术过程中针尖部由于细长导致的弯曲,从而避免引起光学定位位移误差;同时,该结构增加了配准装置针部的刚度,保证了质量的稳定性。手柄呈类t字状结构,便于手部持握,也便于针尖和手柄的插拔。
附图说明
15.图1是本发明配准装置示意图(1);图2是图1配准装置示意图(2);图3是图1中针部示意图;图4是图2中4个光学追踪标识位置示意图;图5是图2中光学追踪标识结构示意图;
图6是光学追踪标识与双目识别系统的位置关系图;图7是配准装置与双目识别系统的位置关系图。
具体实施方式
16.下面结合附图对本发明作进一步说明:实施例一一种关节置换配准装置,与双目视觉系统和计算机上的髋臼窝三维模型软件配合,用于进行病患髋臼窝和所述髋臼窝三维模型间的图像配准。双目识别系统用于对配准装置进行位置识别,髋臼窝三维模型呈现在计算机显示器上,三者相互配合实现关节置换的配准过程。
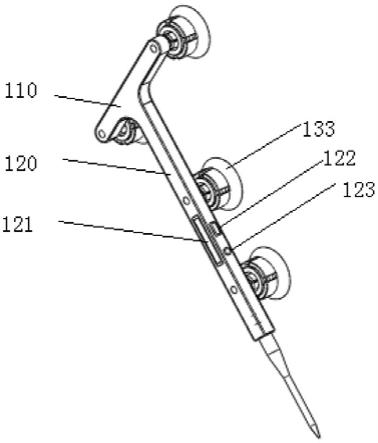
17.如图1所示,配准装置包括手柄100和针部200,针部200设置在手柄100的下端。手柄100呈类t字状,包括第一连接部110和第二连接部120,第二连接部120与第一连接部110中部固定连接,考虑到手握方便,第一连接部110相对第二连接部120倾斜设置。
18.如图2所示,手柄100内部设置有一容置腔,容置腔内置有信号功能模块121,容置腔的一侧设置有第一按钮122和第二按钮123,第一按钮122、第二按钮123均与信号功能模块121电连接。考虑到操作者在手握配准装置时,四指位于配准装置的右侧,所以也将第一按钮122、第二按钮123设置在容置腔右侧壁处,便于操作者控制。其中,第一按钮122为选择确认按钮,第二按钮123为旋转拖动按钮。第一按钮122、第二按钮123均与信号功能模块121电连接,通过信号功能模块121与计算机之间进行信息交互。信号功能模块121与计算机上的髋臼窝三维模型软件无线连接,用于向髋臼窝三维模型软件发送选择确认信号(通过第一按钮)和旋转拖动信号(通过第二按钮),以便于操作者独立完成配准装置与显示器端的配合操作。每次获取目标点位置信息成功后,医生可直接通过第一按钮(确认按钮)确认是否接受该点信息或舍弃,代替助手通过鼠标在显示器上的操作,可以减少医生及助手间低效沟通,减少沟通不畅带来的时间耗费及额外风险。医生按住第二按钮(旋转拖动按钮)切换配准装置功能模式。在图像配准过程中,由于医生需要在病患髋臼窝上选取多个不同位置目标点,故需要多个角度旋转髋臼窝三维模型从而方便选取目标点。该功能模式下,配准装置移动位置,双目视觉系统将实时获取配准装置运动信息(主要是旋转信息,通过算法过滤平移信息),并将其映射到显示器实时显示的髋臼窝三维模型中,进而实现髋臼窝三维模型的实时旋转。医生可通过配准装置的第二按钮控制髋臼窝三维模型旋转,代替鼠标在图像模型上操作。
19.如图3所示,针部200依次包括第一过渡段210、第二过渡段220、第三过渡段230以及针尖部240,第一过渡段210、第二过渡段220、第三过渡段230以及针尖部240的截面宽度依次递减。第一过渡段210为圆柱状,第二过渡段220为倒圆台状,第三过渡段230为圆柱状。通过第一过渡段210、第二过渡段220以及第三过渡段230截面宽度依次递的结构,提供了手柄100与针尖部240之间的平缓过渡,避免手术过程中针尖部240由于细长导致的弯曲,从而避免引起光学定位位移误差;同时,该结构增加了配准装置的刚度,保证了质量的稳定性。当然过渡段的设置不限于本申请所公开的三段式,采用其中某一个或两个过渡段的组合方式也属于本申请的保护范围。
20.手柄100上表面分布有4个光学追踪标识133,光学追踪标识与双目视觉系统配合,
用于确定针部的位置和髋臼窝三维模型的旋转角度。其中两个光学追踪标识133位于第一连接部110的两端,另外两个光学追踪标识133位于第二连接部120上表面,呈上下分布。四个光学追踪标识133之间的位置设置满足使用ndi光学追踪产品必须满足的标准。
21.具体地,如图4所示,将4个光学追踪标识中心位置分别标记为a、b、c、d,a、b、c、d四点共面,ab段长度为55mm,ac段长度为115.43mm,ad段长度为139.46mm,bc段长度为65.19mm,bd段长度为87.32mm,cd段长度为74.33mm。以针尖处为坐标原点,4个光学追踪标识的位置关系如下表所示:如图5所示,光学追踪标识133包括底座,底座上方设有反光片,反光片的四周设置有喇叭口包围圈,喇叭口包围圈和反光片一起围成碗状。此外,光学追踪标识的结构不限于此,其他包括反光片,在反光片周围设置包围圈的设计均在本申请的保护范围内。光学追踪标识133采用塑料材料,喇叭口包围圈内表面设有光滑的反射涂层。与原有的光学小球材料相比,有如下好处:a.表面光滑,无光学小球表面的颗粒感,术中若被血液或其他杂质污染,可以快速清理。b.不易磨损,从而影响光学定位与追踪的精度。c.更具有经济性。喇叭口包围圈的设置以最大程度保证底部中间的圆形被双目视觉识别到为最佳。
22.喇叭口包围圈的设置以最大程度保证底部中间的圆形反光片被双目视觉识别到为最佳,兼顾医生操作的便捷性。具体地,如图6所示,反光片的直径为d2,10mm<d2<20mm,双目视觉系统233相对反光片同向的水平方向偏移为l,l>1500mm。双目视觉系统相对反光片同向的高度偏移为h2,1500mm<h2<2000mm。反光片边缘处与双目视觉系统的连线相对水平面的夹角为α,反光片边缘处与双目视觉系统之间的距离为l2。经过反复验证,双目视觉系统的最佳识别范围,即光学追踪标识能被双目视觉系统识别的位置范围为:20
°
<α<160,500mm<l2<2500mm。
23.喇叭口包围圈的高度为h1,喇叭口包围圈的最大直径为d1,喇叭口包围圈相对水平面的夹角为θ,为了便于双目视觉系统识别且保证识别效果,角度θ应小于角度α,即θ<α。为了保护反光片面在手术过程中不收到异物污染,角度θ则越大越好。鉴于此,当h1和d1满足以下数学表达式:functionmaxθ=arctan(2*h1/(d1-d2))subject to0<θ<α,α=arctan(h2/l),其中10mm<d2<20mm,l>1500mm,1500mm<h2<2000mm,20
°
<α<160
°
,500mm<l2<2500mm。
24.即在满足上述条件约束下,求出θ最大值maxθ,进而根据制造工艺,确定h1与d1值,从而设计光学追踪标识的最佳外形。
25.实施例二一种关节置换配准方法s100、通过所述配准装置获取病患髋臼窝骨性第一标志点,当所述骨性第一标志点位置与所述髋臼窝三维模型位置符合预期时,通过所述第一按钮122进行确认,将所述骨性第一标志点和所述髋臼窝三维模型间进行一次配准;s200、利用所述配准装置点击病患髋臼窝不同平面,通过所述第二按钮带动所述髋臼窝三维模型的旋转,直至待配准的点所在的平面处于所述髋臼窝三维模型的正面,然后依次选取n个骨性第二标志点,并通过所述第一按钮122进行确认,将所述骨性第二标志点和所述髋臼窝三维模型间进行二次配准。
26.其中,骨性第一标志点位置、骨性第二标志点位置,通过所述配准装置上的光学追踪标识与双目识别系统的相互配合获得。
27.光学定位组件可以安装在配准装置表面,与双目视觉系统500配合,如图7所示,用于标定配准装置位置及定位针尖所在空间位置。配准装置手柄100上表面分布有4个光学追踪标识133,光学追踪标识与双目视觉系统配合用于确定配准装置针尖的位置信息和运动信息。4个光学追踪标识之间的位置设置满足使用ndi光学追踪产品必须满足的标准。
28.以上显示和描述了本发明的基本原理、主要特征和优点。本行业的技术人员应该了解,本发明不受上述实施例的限制,上述实施例和说明书中描述的只是说明本发明的原理,在不脱离本发明精神和范围的前提下,本发明还会有各种变化和改进,这些变化和改进都落入要求保护的本发明范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1