具有内收外展和屈曲伸展的手指康复外骨骼机器人
1.本发明属于生物机械工程领域,具体涉及一种具有内收外展和屈曲伸展的手指康复外骨骼机器人。
背景技术:
2.脑卒中后有30%
‑
60%的患者遗留上肢运动功能障碍,尤其表现为手部运动功能障碍。在日常生活中,人手具有手势(第二语言)、抓取、操作的功能,承担日常活动整体功能的27%;在大脑运动皮层中,人手是运动控制区域所占比例最大的器官之一。因此在康复医师的指导下,对脑卒中患者手部进行规范治疗,恢复患者手部功能具有重大意义。但是康复治疗师数量完全不足以满足巨大的康复市场需求,单纯地期望依靠临床治疗医师辅助患者进行康复运动训练是不符合实际需求的。为了解决治疗师与患者数量严重不平衡的问题,手部康复外骨骼机器人致力于将先进的机器人技术引入到康复工程当中,辅助患者恢复其手部的正常生活形态或功能。
3.人手具有复杂的解剖学结构,主要由关节面、关节囊、腔韧带、内软骨以及滑膜襞等组成。人手四指(除拇指外)有三个关节组成:掌指关节、近端关节、远端关节,其中掌指关节能够实现屈曲/伸展和内收/外展运动,近端关节和远端关节能够实现屈曲伸展运动且两个关节存在耦合运动。相关研究表明,关节独立运动能够改善患者肢体的运动学习能力。一些手部康复装置已经被研制出来,但是这些康复装置只考虑了手指关节的屈曲/伸展运动,而忽略了掌指关节的内收/外展运动,未能充分辅助手指的自然运动。另一些手部康复机器人尽管能够辅助手指进行内收外展运动,但是由于手指关节转轴不确定,易造成人机关节转轴错位,而产生人机之间不期望交互力,或者机器人为了对关节施加期望转矩而对关节产生机械应力;根据现有医学研究,机械应力能够引起关节变形或者退化等疾病,因此手部康复外骨骼机器人应避免人机之间不期望的交互力。
4.综上所述,现有的多数康复机器人只能辅助人手进行屈曲伸展运动,而忽略内收外展运动,对手指关节产生机械应力,易造成关节退化或变形等疾病。
技术实现要素:
5.为了解决现有技术中的上述问题,即为了解决现有辅助掌指关节内收外展和屈曲伸展运动的康复机器人不能实现人机关节的自适应对齐,并且人机之间存在关节机械应力,本发明提供了一种具有内收外展和屈曲伸展的手指康复外骨骼机器人,包括驱动组件、掌指关节传动组件和近端关节传动组件;所述驱动组件包括第一驱动组件、第二驱动组件和第三驱动组件;
6.所述掌指关节传动组件包括设置于手背的第一平移组件、与所述第一平移组件可转动连接的内外驱动绳轮、固设于所述内外驱动绳轮的换向连杆、指基连杆以及设置于近端指骨的第二平移组件;所述第一平移组件的平移方向与手指长度方向垂直设置;所述内外驱动绳轮上绕设有与所述第一驱动组件连接的第一组钢丝绳;所述指基连杆的一端与所
述换向连杆连接,另一端与所述第二平移组件连接,所述指基连杆的另一端的两侧分别设有第一固定绳轮和第二固定绳轮;所述换向连杆远离所述内外驱动绳轮的一端的两侧设置有第一过渡轮、第二过渡轮,与所述第二驱动组件连接的第二组钢丝绳分别绕过所述第一过渡轮、所述第二过渡轮与所述第一固定绳轮、所述第二固定绳轮连接,且所述第一过渡轮、所述第二过渡轮上的钢丝绳绕向相反设置;所述第二平移组件的平移方向与手指的长度方向一致设置;所述内外驱动绳轮在所述第一驱动组件的驱动下带动所述换向连杆、所述指基连杆可控制人手的内收外展运动;所述第一固定绳轮、所述第二固定绳轮在所述第二驱动组件的驱动下可带动所述指基连杆控制近端指骨的屈曲伸展运动;
7.所述近端关节传动组件的一端与所述指基连杆可转动连接,另一端设置于中段指骨;所述近端关节传动组件可在所述第三驱动组件的驱动下控制中段指骨的屈曲伸展运动。
8.在一些优选实施例中,所述第一平移组件包括滑道支撑基座、掌侧直线滑道、掌侧直线滑块和掌侧滑块连接块,所述滑道支撑基座通过手掌固定基座设置于掌背;所述掌侧直线滑道设置于所述滑道支撑基座,所述掌侧直线滑道的侧部设置有掌侧凸起滑道;所述掌侧直线滑块设置于所述掌侧直线滑道的外侧,且所述掌侧直线滑块的侧部设置有与所述掌侧凸起滑道匹配的掌侧凹槽;所述掌侧滑块连接块的一端与所述掌侧直线滑块固定连接,另一端通过轴承与所述内外驱动绳轮可转动连接。
9.在一些优选实施例中,所述第二平移组件包括指侧直线滑道、指侧直线滑块和指基滑块连接块,所述指侧直线滑道通过绑带固定于近端指骨,所述指侧直线滑道的上部设置有指侧凸起滑道;所述指侧直线滑块设置于所述指侧直线滑道的上部,且所述指侧直线滑块的底部设置有与所述指侧凸起滑道匹配的指侧凹槽;所述指基滑块连接块固设于所述指侧直线滑块的顶部,所述指基滑块连接块设置有第一连接通孔和第二连接通孔,所述第一连接通孔、所述第二连接通孔分别用于固定所述第一固定绳轮、所述第二固定绳轮;所述第一连接通孔与所述第二连接通孔之间设置有轴承以固定所述指基连杆。
10.在一些优选实施例中,所述近端关节传动组件包括指中驱动杆、指中驱动绳轮和指中连杆;所述指中驱动杆的一端与所述指中驱动绳轮可转动连接,另一端与所述指基滑块连接块可转动连接;
11.所述指中连杆的一端与所述指中驱动绳轮固定连接,另一端通过指中骨节连接块连接于中段指骨;
12.所述指中驱动杆、所述指中连杆与人手的中段指骨、近端指骨构成四连杆机构。
13.在一些优选实施例中,所述第一驱动组件、所述第二驱动组件与所述第三驱动组件通过电机支撑座承载设置;
14.所述第一驱动组件包括第一驱动电机以及与所述第一驱动电机的输出端连接的第一电机端驱动绳轮;所述第一组钢丝绳包括第一钢丝绳和第二钢丝绳,所述第一钢丝绳、所述第二钢丝绳的一端通过第一钢丝绳压紧螺栓固定于所述第一电机端驱动绳轮,所述第一钢丝绳、所述第二钢丝绳的另一端分别通过第一调节装置、第二调节装置穿入设置于所述电机支撑座与所述内外驱动绳轮之间的第一鲍登线管、第二鲍登线管;
15.所述第二驱动组件包括第二驱动电机以及与所述第二驱动电机的输出端连接的第二电机端驱动绳轮;所述第二组钢丝绳包括第三钢丝绳和第四钢丝绳,所述第三钢丝绳、
所述第四钢丝绳的一端通过第二钢丝绳压紧螺栓固定于所述第二电机端驱动绳轮,所述第三钢丝绳的另一端通过第三调节装置穿入设置于所述电机支撑座与所述第一过渡轮之间的第三鲍登线管,所述第四钢丝绳的另一端通过第四调节装置穿入设置于所述电机支撑座与所述第二过渡轮之间的第四鲍登线管;
16.所述第三驱动组件包括第三驱动电机以及与所述第三驱动电机的输出端连接的第三电机端驱动绳轮;所述近端关节传动组件通过第三组钢丝绳与所述第三驱动组件连接,所述第三组钢丝绳包括第五钢丝绳和第六钢丝绳,所述第五钢丝绳、所述第六钢丝绳的一端通过第三钢丝绳压紧螺栓固定于所述第三电机端驱动绳轮,所述第五钢丝绳、所述第六钢丝绳的另一端分别通过第五调节装置、第六调节装置穿入设置于所述电机支撑座与所述近端关节传动组件之间的第五鲍登线管、第六鲍登线管。
17.在一些优选实施例中,该机器人还包括第一绳管支撑件、第二绳管支撑件、第三绳管支撑件、第四绳管支撑件、第五绳管支撑件和第六绳管支撑件;
18.所述第一绳管支撑件、所述第二绳管支撑件固设于所述第一平移组件,所述第一绳管支撑件、所述第二绳管支撑件的延伸轴线均与所述内外驱动绳轮的钢丝绳轨道切线重合设置;所述第一鲍登线管远离所述第一电机端驱动绳轮的一端固定所述第一绳管支撑件远离所述内外驱动绳轮的一侧;所述第二鲍登线管远离所述第一电机端驱动绳轮的一端固定所述第二绳管支撑件远离所述内外驱动绳轮的一侧;
19.所述第三绳管支撑件、所述第四绳管支撑件固设于所述换向连杆,所述第三绳管支撑件的延伸轴线、所述第四绳管支撑件的延伸轴线分别与所述第一过渡轮、所述第二过渡轮的钢丝绳轨道切线重合设置;所述第三鲍登线管远离所述第二电机端驱动绳轮的一端固定所述第三绳管支撑件远离所述第一过渡轮的一侧;所述第四鲍登线管远离所述第二电机端驱动绳轮的一端固定所述第四绳管支撑件远离所述第二过渡轮的一侧;
20.所述第五绳管支撑件、所述第六绳管支撑件固设于所述近端关节传动组件;所述第五鲍登线管远离所述第三电机端驱动绳轮的一端固定所述第五绳管支撑件的外侧;所述第六鲍登线管远离所述第三电机端驱动绳轮的一端固定所述第六绳管支撑件的外侧。
21.在一些优选实施例中,所述第一调节装置、所述第二调节装置、所述第三调节装置、所述第四调节装置、所述第五调节装置与所述第六调节装置均设置于所述电机支撑座;
22.所述第一调节装置包括第一空心管和第一组锁紧螺母,所述第一空心管包括第一段和第二段,所述第一段的外径小于所述第二段的外径;所述第一段的外侧设置有螺纹,所述第一段穿过所述电机支撑座的侧壁通孔通过所述第一组锁紧螺母固定;所述第一段靠近所述第一电机端驱动绳轮设置,用于穿设所述第一钢丝绳,所述第二段设置于所述第一段远离所述第一电机端驱动绳轮的一端,以穿设并固定所述第一鲍登线管;
23.所述第二调节装置包括第二空心管和第二组锁紧螺母,所述第二空心管包括第三段和第四段,所述第三段的外径小于所述第四段的外径;所述第三段的外侧设置有螺纹,所述第三段穿过所述电机支撑座的侧壁通孔通过所述第二组锁紧螺母固定;所述第三段靠近所述第一电机端驱动绳轮设置,用于穿设所述第二钢丝绳,所述第四段设置于所述第三段远离所述第一电机端驱动绳轮的一端,以穿设并固定所述第二鲍登线管;
24.所述第三调节装置包括第三空心管和第三组锁紧螺母,所述第三空心管包括第五段和第六段,所述第五段的外径小于所述第六段的外径;所述第五段的外侧设置有螺纹,所
述第五段穿过所述电机支撑座的侧壁通孔通过所述第三组锁紧螺母固定;所述第五段靠近所述第二电机端驱动绳轮设置,用于穿设所述第三钢丝绳,所述第六段设置于所述第五段远离所述第二电机端驱动绳轮的一端,以穿设并固定所述第三鲍登线管;
25.所述第四调节装置包括第四空心管和第四组锁紧螺母,所述第四空心管包括第七段和第八段,所述第七段的外径小于所述第八段的外径;所述第七段的外侧设置有螺纹,所述第七段穿过所述电机支撑座的侧壁通孔通过所述第四组锁紧螺母固定;所述第七段靠近所述第二电机端驱动绳轮设置,用于穿设所述第四钢丝绳,所述第八段设置于所述第七段远离所述第二电机端驱动绳轮的一端,以穿设并固定所述第四鲍登线管;
26.所述第五调节装置包括第五空心管和第五组锁紧螺母,所述第五空心管包括第九段和第十段,所述第九段的外径小于所述第十段的外径;所述第九段的外侧设置有螺纹,所述第九段穿过所述电机支撑座的侧壁通孔通过所述第五组锁紧螺母固定;所述第九段靠近所述第三电机端驱动绳轮设置,用于穿设所述第五钢丝绳,所述第十段设置于所述第九段远离所述第三电机端驱动绳轮的一端,以穿设并固定所述第五鲍登线管;
27.所述第六调节装置包括第六空心管和第六组锁紧螺母,所述第六空心管包括第十一段和第十二段,所述第十一段的外径小于所述第十二段的外径;所述第十一段的外侧设置有螺纹,所述第十一段穿过所述电机支撑座的侧壁通孔通过所述第六组锁紧螺母固定;所述第十一段靠近所述第三电机端驱动绳轮设置,用于穿设所述第六钢丝绳,所述第十二段设置于所述第九段远离所述第三电机端驱动绳轮的一端,以穿设并固定所述第六鲍登线管。
28.在一些优选实施例中,所述第一空心管与所述第二空心管平行设置,且所述第一空心管、所述第二空心管的延伸轴线与所述第一电机端驱动绳轮的钢丝绳轨道切线重合设置;
29.所述第三空心管与所述第四空心管平行设置,且所述第三空心管、所述第四空心管的延伸轴线与所述第二电机端驱动绳轮的钢丝绳轨道切线重合设置;
30.所述第五空心管与所述第六空心管平行设置,且所述第五空心管、所述第六空心管的延伸轴线与所述第三电机端驱动绳轮的钢丝绳轨道切线重合设置。
31.在一些优选实施例中,所述指基连杆的弧度与手指的屈曲方向一致设置。
32.在一些优选实施例中,所述第一过渡轮、所述第二过渡轮、所述第一固定绳轮与所述第二固定绳轮的半径相同设置。
33.1)通过本发明提出的具有内收外展和屈曲伸展的手指康复外骨骼机器人,能够独立执行掌指关节的内收外展和屈曲伸展运动以及近端关节的屈曲伸展运动,而远端关节的屈曲伸展运动是依靠其与近端关节的耦合运动实现的。
34.2)本发明充分把手指骨节作为传动机构的一部分,能够实现人机关节的自适应对齐,特别地,针对掌指关节具有两个正交自由度,提出一种空间串联连杆机构。
35.3)本发明通过采用移动副放置于手指背部,消除沿着手指方向的作用力,以及采用绳传动对掌指关节外骨骼连杆的两个旋转关节施加相同的驱动力矩,消除外骨骼对手指关节另两个正交方向的机械应力。
附图说明
36.通过阅读参照以下附图所作的对非限制性实施例所作的详细描述,本申请的其它特征、目的和优点将会变得更明显:
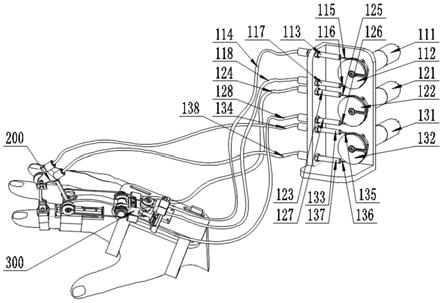
37.图1是本发明具有内收外展和屈曲伸展的手指康复外骨骼机器人的一种具体实施例的立体结构示意图;
38.图2是图1中的掌指关节传动组件和近端关节传动组件的立体结构示意图;
39.图3是图1中的掌指关节传动组件的局部爆炸示意图;
40.图4是本发明具有内收外展和屈曲伸展的手指康复外骨骼机器人的一种具体实施例的运动示意图;
41.图5是本发明中的中段指骨屈曲运动的一种具体实施例的四连杆运动模型示意图;
42.图6是本发明具有内收外展和屈曲伸展的手指康复外骨骼机器人的中段指骨屈曲运动的一种具体实施例的运动模型示意图;
43.图7是本发明具有内收外展和屈曲伸展的手指康复外骨骼机器人的近端指骨屈曲伸展的一种具体实施例的运动示意图;
44.图8是本发明具有内收外展和屈曲伸展的手指康复外骨骼机器人的屈曲伸展的一种具体实施例的运动示意图;
45.图9是本发明具有内收外展和屈曲伸展的手指康复外骨骼机器人的内收外展的一种具体实施例的运动示意图。
46.附图标记说明:
47.111、第一驱动电机,112、第一电机端驱动绳轮,113、第一调节装置,114、第一鲍登线管,115、第一钢丝绳,116、第二钢丝绳,117、第二调节装置,118、第二鲍登线管;121、第二驱动电机,122、第二电机端驱动绳轮,123、第三调节装置,124、第三鲍登线管,125、第三钢丝绳,126、第四钢丝绳,127、第四调节装置,128、第四鲍登线管;131、第三驱动电机,132、第三电机端驱动绳轮,133、第五调节装置,134、第五鲍登线管,135、第五钢丝绳,136、第六钢丝绳,137、第六调节装置,138、第六鲍登线管;
48.200、掌指关节传动组件;210、第一平移组件,211、滑道支撑基座,212、掌侧直线滑道,213、掌侧直线滑块,214、掌侧滑块连接块;220、内外驱动绳轮;230、换向连杆,231、第一过渡轮,232、第二过渡轮;240、指基连杆,241、第一固定绳轮,242、第二固定绳轮;250、第二平移组件,251、指侧直线滑道,252、指侧直线滑块,253、指基滑块连接块;260、手掌固定基座;271、第一绳管支撑件,272、第二绳管支撑件,273、第三绳管支撑件,274、第四绳管支撑件,275、第五绳管支撑件,276、第六绳管支撑件;
49.300、近端关节传动组件;310、指中驱动杆,320、指中驱动绳轮,330、指中连杆,340、指中骨节连接块,350、第五绳管支撑件,260、第六绳管支撑件。
具体实施方式
50.下面参照附图来描述本发明的优选实施方式,本领域技术人员应当理解的是,这些实施方式仅仅用于解释本发明的技术原理,并非旨在限制本发明的保护范围。
51.本发明提供了一种具有内收外展和屈曲伸展的手指康复外骨骼机器人,包括驱动
组件、掌指关节传动组件和近端关节传动组件;驱动组件包括通过电机支撑座承载的第一驱动组件、第二驱动组件和第三驱动组件,第一驱动组件、第二驱动组件与第三驱动组件独立设置;掌指关节传动组件包括手掌固定基座、设置于手掌固定基座的第一平移组件、内外驱动绳轮、换向连杆、指基连杆、过渡轮组和第二平移组件;第一平移组件的平移方向与手指长度方向垂直设置;内外驱动绳轮与第一平移组件可转动连接,内外驱动绳轮上绕设有与第一驱动组件连接的第一组钢丝绳;换向连杆的一端与内外驱动绳轮固定连接,另一端用于连接指基连杆、过渡轮组;指基连杆远离换向连杆的一端与第二平移组件可滑动连接,指基连杆的弧度与手指的屈曲方向一致设置;指基连杆的两侧分别固设有第一指基固定绳轮和第二指基固定绳轮;过渡轮组包括可转动设置于换向连杆两侧的第一过渡轮、第二过渡轮,第二钢丝绳的两端分别绕过第一过渡轮、第二过渡轮与第一指基固定绳轮、第二指基固定绳轮固定连接,第一过渡轮、第二过渡轮上的钢丝绳绕向相反设置;第二平移组件设置于近端指骨,且第二平移组件的平移方向与手指的长度方向一致;近端关节传动组件包括指中驱动杆、指中驱动绳轮以及设置于中段指骨的指中连杆,指中驱动杆、指中连杆均与指中驱动绳轮铰接设置;指中驱动杆通过第三钢丝绳与第三驱动组件连接;内外驱动绳轮可在第一驱动组件的驱动下带动换向连杆、指基连杆、近端关节传动组件运动,近端关节传动组件在第三驱动组件的驱动下与第一驱动组件配合以实现人手的屈曲伸展运动;第二驱动组件通过第一过渡轮、第一指基固定绳轮、第二过渡轮、第二指基固定绳轮控制人手的内收外展运动;该手指康复外骨骼机器人能够控制手指关节独立进行内收外展和屈曲伸展运动,实现人机关节的自适应对齐,消除机器人对掌指关节的机械应力。
52.以下参照附图结合具体实施例进一步说明本发明。
53.参照附图1,图示是本发明具有内收外展和屈曲伸展的手指康复外骨骼机器人的一种具体实施例的立体结构示意图,包括驱动组件、掌指关节传动组件200和近端关节传动组件300;其中,驱动组件包括第一驱动组件、第二驱动组件和第三驱动组件;第一驱动组件、第二驱动组件与第三驱动组件通过电机支撑座承载设置,第一驱动组件通过第一组钢丝绳与掌指关节传动组件200中的内外驱动绳轮连接,通过第一驱动组件可控制人手的内收外展运动;第二驱动组件通过第二组钢丝绳与掌指关节传动组件200中的指基连杆连接,通过第二驱动组件可控制近端指骨的屈曲伸展运动;第三驱动组件通过第三组钢丝绳与近端关节传动组件300中的指中驱动绳轮连接,通过第三驱动组件可控制中段指骨的屈曲伸展运动。
54.第一驱动组件包括第一驱动电机111以及与第一驱动电机的输出端连接的第一电机端驱动绳轮112;第一组钢丝绳包括第一钢丝绳115和第二钢丝绳116,第一钢丝绳、第二钢丝绳的一端通过第一钢丝绳压紧螺栓固定于第一电机端驱动绳轮,第一钢丝绳、第二钢丝绳的另一端分别通过第一调节装置113、第二调节装置117穿入设置于电机支撑座与掌指关节传动组件中的内外驱动绳轮之间的第一鲍登线管114、第二鲍登线管118。
55.第二驱动组件包括第二驱动电机121以及与第二驱动电机的输出端连接的第二电机端驱动绳轮122;第二组钢丝绳包括第三钢丝绳125和第四钢丝绳126,第三钢丝绳、第四钢丝绳的一端通过第二钢丝绳压紧螺栓固定于第二电机端驱动绳轮,第三钢丝绳的另一端通过第三调节装置123穿入设置于电机支撑座与掌指关节传动组件中的第一过渡轮之间的第三鲍登线管124,第四钢丝绳的另一端通过第四调节装置127穿入设置于电机支撑座与掌
指关节传动组件中的第二过渡轮之间的第四鲍登线管128。
56.第三驱动组件包括第三驱动电机131以及与第三驱动电机的输出端连接的第三电机端驱动绳轮132;近端关节传动组件通过第三组钢丝绳与第三驱动组件连接,第三组钢丝绳包括第五钢丝绳135和第六钢丝绳136,第五钢丝绳、第六钢丝绳的一端通过第三钢丝绳压紧螺栓固定于第三电机端驱动绳轮,第五钢丝绳、第六钢丝绳的另一端分别通过第五调节装置133、第六调节装置137穿入设置于电机支撑座与近端关节传动组件之间的第五鲍登线管134、第六鲍登线管138。
57.进一步地,第一调节装置113、第二调节装置117、第三调节装置123、第四调节装置127、第五调节装置133与第六调节装置137均设置于电机支撑座。
58.优选地,第一调节装置包括第一空心管和第一组锁紧螺母,第一空心管包括第一段和第二段,第一段的外径小于第二段的外径;第一段的外侧设置有螺纹,第一段穿过电机支撑座的侧壁通孔通过第一组锁紧螺母固定;第一段靠近第一电机端驱动绳轮设置,用于穿设第一钢丝绳,第二段设置于第一段远离第一电机端驱动绳轮的一端,以穿设并固定第一鲍登线管。
59.优选地,第二调节装置包括第二空心管和第二组锁紧螺母,第二空心管包括第三段和第四段,第三段的外径小于第四段的外径;第三段的外侧设置有螺纹,第三段穿过电机支撑座的侧壁通孔通过第二组锁紧螺母固定;第三段靠近第一电机端驱动绳轮设置,用于穿设第二钢丝绳,第四段设置于第三段远离第一电机端驱动绳轮的一端,以穿设并固定第二鲍登线管。
60.优选地,第三调节装置包括第三空心管和第三组锁紧螺母,第三空心管包括第五段和第六段,第五段的外径小于第六段的外径;第五段的外侧设置有螺纹,第五段穿过电机支撑座的侧壁通孔通过第三组锁紧螺母固定;第五段靠近第二电机端驱动绳轮设置,用于穿设第三钢丝绳,第六段设置于第五段远离第二电机端驱动绳轮的一端,以穿设并固定第三鲍登线管。
61.优选地,第四调节装置包括第四空心管和第四组锁紧螺母,第四空心管包括第七段和第八段,第七段的外径小于第八段的外径;第七段的外侧设置有螺纹,第七段穿过电机支撑座的侧壁通孔通过第四组锁紧螺母固定;第七段靠近第二电机端驱动绳轮设置,用于穿设第四钢丝绳,第八段设置于第七段远离第二电机端驱动绳轮的一端,以穿设并固定第四鲍登线管。
62.优选地,第五调节装置包括第五空心管和第五组锁紧螺母,第五空心管包括第九段和第十段,第九段的外径小于第十段的外径;第九段的外侧设置有螺纹,第九段穿过电机支撑座的侧壁通孔通过第五组锁紧螺母固定;第九段靠近第三电机端驱动绳轮设置,用于穿设第五钢丝绳,第十段设置于第九段远离第三电机端驱动绳轮的一端,以穿设并固定第五鲍登线管。
63.优选地,第六调节装置包括第六空心管和第六组锁紧螺母,第六空心管包括第十一段和第十二段,第十一段的外径小于第十二段的外径;第十一段的外侧设置有螺纹,第十一段穿过电机支撑座的侧壁通孔通过第六组锁紧螺母固定;第十一段靠近第三电机端驱动绳轮设置,用于穿设第六钢丝绳,第十二段设置于第九段远离第三电机端驱动绳轮的一端,以穿设并固定第六鲍登线管。
64.优选地,第一空心管与所述第二空心管平行设置,且第一空心管、第二空心管的延伸轴线与第一电机端驱动绳轮的钢丝绳轨道切线重合设置;第三空心管与第四空心管平行设置,且第三空心管、第四空心管的延伸轴线与第二电机端驱动绳轮的钢丝绳轨道切线重合设置;第五空心管与第六空心管平行设置,且第五空心管、第六空心管的延伸轴线与第三电机端驱动绳轮的钢丝绳轨道切线重合设置,避免钢丝绳与其产生摩擦。
65.优选地,第一组锁紧螺母、第二组锁紧螺母、第三组锁紧螺母、第四组锁紧螺母、第五组锁紧螺母和第六组锁紧螺母中选用的是两个一样的螺母拧在对应的空心管上;由于钢丝绳在使用过程中会产生松动,产生回差,通过对应的调节装置的设置能够消除这个误差;电机支座上有螺纹,前后两个螺母的作用是夹紧带外螺纹的空心管,通过在两个螺母之间附加一个拧紧力矩,使得空心管连接可靠。
66.参照附图1的同时参照附图2,图2是图1中的掌指关节传动组件和近端关节传动组件的立体结构示意图;近端关节传动组件包括指中驱动杆310、指中驱动绳轮320和指中连杆330;指中驱动杆的一端与指中驱动绳轮可转动连接,另一端与掌指关节传动组件中的指基滑块连接块可转动连接;指中连杆的一端与指中驱动绳轮固定连接,另一端通过指中骨节连接块连接于中段指骨,即指中连杆的另一端与指中骨节连接块铰接,指中骨节连接块与中段指骨固定连接,在本实施例中,指中骨节连接块与中段指骨属于一部分,指中驱动杆、指中连杆与人手的中段指骨、近端指骨构成四连杆机构。近端关节传动组件的一端与指基连杆可转动连接,另一端设置于中段指骨,近端关节传动组件可在第三驱动组件的驱动下控制中段指骨的屈曲伸展运动;近端关节传动部分是由转动副
‑
转动副
‑
转动副依次顺序连接而成,且第一个转动副与掌指关节传动部分的最后一个转动副相连接,能够相对转动。
67.优选地,指中驱动杆310的外侧设置有第五绳管支撑件350、第六绳管支撑件360,用于分别固定第五鲍登线管、第六鲍登线管。
68.掌指关节传动组件包括设置于手背的第一平移组件210、与第一平移组件可转动连接的内外驱动绳轮220、固设于内外驱动绳轮的换向连杆230、指基连杆240以及设置于近端指骨的第二平移组件250;第一平移组件的平移方向与手指长度方向垂直设置,便于抵消人手在进行内收外展运动的抵触力;指基连杆的一端与换向连杆连接,另一端与第二平移组件连接;内外驱动绳轮上绕设有与第一驱动组件连接的第一组钢丝绳,内外驱动绳轮在第一驱动组件的驱动下带动所述换向连杆、指基连杆可控制人手的内收外展运动。
69.参照附图2的同时参照附图3,图3是图1中的掌指关节传动组件的局部爆炸示意图;指基连杆的另一端的两侧分别设有第一固定绳轮241和第二固定绳轮242;换向连杆远离内外驱动绳轮的一端的两侧设置有第一过渡轮231、第二过渡轮232,与第二驱动组件连接的第二组钢丝绳分别绕过第一过渡轮、第二过渡轮与第一固定绳轮、第二固定绳轮连接,且第一过渡轮、第二过渡轮上的钢丝绳绕向相反设置,以保证驱动装置可控制人手的内收外展运动。
70.第二平移组件的平移方向与手指的长度方向一致设置;第一固定绳轮241、第二固定绳轮242在第二驱动组件的驱动下可带动指基连杆240控制近端指骨的屈曲伸展运动。
71.进一步地,第一平移组件包括滑道支撑基座211、掌侧直线滑道212、掌侧直线滑块213和掌侧滑块连接块214,滑道支撑基座通过手掌固定基座260设置于掌背;掌侧直线滑道设置于滑道支撑基座,掌侧直线滑道的侧部设置有掌侧凸起滑道;掌侧直线滑块设置于掌
侧直线滑道的外侧,且掌侧直线滑块的侧部设置有与掌侧凸起滑道匹配的掌侧凹槽;掌侧滑块连接块的一端与掌侧直线滑块固定连接,另一端通过轴承与内外驱动绳轮可转动连接。
72.进一步地,第二平移组件包括指侧直线滑道251、指侧直线滑块252和指基滑块连接块253,指侧直线滑道通过绑带固定于近端指骨,指侧直线滑道的上部设置有指侧凸起滑道;指侧直线滑块设置于指侧直线滑道的上部,且指侧直线滑块的底部设置有与指侧凸起滑道匹配的指侧凹槽;指基滑块连接块固设于指侧直线滑块的顶部,指基滑块连接块设置有第一连接通孔和第二连接通孔以分别固定第一固定绳轮、第二固定绳轮,进一步地,第一固定绳轮、第二固定绳轮的内侧设置有与第一连接通孔、第二连接通孔对应固定的凸起,便于第一固定绳轮、第二固定绳轮的固定卡合;第一连接通孔与第二连接通孔之间设置有轴承以固定指基连杆,指基连杆通过轴承相对于指基滑块连接块可转动连接设置。
73.该机器人还包括第一绳管支撑件271、第二绳管支撑件272、第三绳管支撑件273和第四绳管支撑件274,第一绳管支撑件、第二绳管支撑件固设于掌侧滑块连接块,第一绳管支撑件、第二绳管支撑件的延伸轴线均与内外驱动绳轮的钢丝绳轨道切线重合设置;第一鲍登线管远离第一电机端驱动绳轮的一端固定第一绳管支撑件远离内外驱动绳轮的一侧;第二鲍登线管远离第一电机端驱动绳轮的一端固定第二绳管支撑件远离内外驱动绳轮的一侧。
74.第三绳管支撑件273、第四绳管支撑件274固设于换向连杆,230第三绳管支撑件的延伸轴线、第四绳管支撑件的延伸轴线分别与第一过渡轮、第二过渡轮的钢丝绳轨道切线重合设置;第三鲍登线管远离第二电机端驱动绳轮的一端固定第三绳管支撑件远离第一过渡轮的一侧;第四鲍登线管远离第二电机端驱动绳轮的一端固定第四绳管支撑件远离第二过渡轮的一侧。
75.优选地,指基连杆的弧度与手指的屈曲方向一致设置。
76.优选地,第一过渡轮、第二过渡轮、第一固定绳轮与第二固定绳轮的半径相同设置,从而保证钢丝绳传动能够对相应的两个转动副施加相等的驱动力矩。
77.优选地,手掌固定基座的侧部设置有绑带固定部以固定于手背;绑带可调节设置,以适应不同人员的手型大小;同理,手指固定的部件可为带有阻尼的弹性指环,或者绑带。
78.参照附图4,图示是本发明具有内收外展和屈曲伸展的手指康复外骨骼机器人的一种具体实施例的运动示意图;本发明提出的手指康复外骨骼机器人具有的三个主动自由度能够实现手指关节的独立运动,开环连杆机构与人手指骨节组成运动闭链,能够实现人机关节的自适应对齐,采用合适的连杆构型以及绳驱动结构,消除关节机械应力。其中,掌指关节传动部分是由移动副j1
‑
转动副j2
‑
转动副j3
‑
转动副j4
‑
移动副j5依次顺序连接组合而成,第一驱动组件的驱动力矩通过第一组钢丝绳作用于转动副j2,进而依次带动换向连杆、指基连杆实现手指的内收外展运动;通过设置在近端指骨上的第二平移组件,通过指基滑块连接块可带动指侧直线滑块在指侧直线滑道上平移,即移动副j5产生相应的运动;当第二驱动组件通过第二组钢丝绳驱动时,分别通过第一过渡轮、第二过渡轮作用于第一固定绳轮、第二固定绳轮,进而作用于转动副j4上,实现对近端指骨的屈曲伸展运动训练;近端关节传动组件是由转动副j4、转动副j6、转动副j7依次顺序连接而成,且转动副j4与掌指关节传动部分的最后一个转动副相连接,能够相对转动。
79.参照附图4的同时参照附图5和附图6,图5是本发明中的中段指骨屈曲运动的一种具体实施例的四连杆运动模型示意图,图6是本发明具有内收外展和屈曲伸展的手指康复外骨骼机器人的中段指骨屈曲运动的一种具体实施例的运动模型示意图;连杆a1b相当于指中驱动杆,连杆a1c1相当于指中连杆,连杆c1o相当于中段指骨,连杆ob相当于近端指骨;当进行中段指骨训练时,由于第一驱动组件和第二驱动组件不启动,b点的位置在指基连杆、换向连杆以及内外驱动绳轮的抵触力作用下固定,即在第二平移组件上固定,故构成的四连杆中ob为固定连杆段;当第三驱动组件的驱动力矩施加于a1处(即转动副j6)上,具体地,当第三驱动组件驱动转动副j6顺时针运动时,角a1bo减少(变为角a2bo),b处的转动副(即转动副j4)逆时针转动,角c1ob减少(变为角c2ob),能够实现中段指骨(即连杆c1o段)的屈曲运动训练。
80.进一步地,参照附图7和附图8,图7是本发明具有内收外展和屈曲伸展的手指康复外骨骼机器人的近端指骨屈曲伸展的一种具体实施例的运动示意图,图8是本发明具有内收外展和屈曲伸展的手指康复外骨骼机器人的屈曲伸展的一种具体实施例的运动示意图;当第二驱动组件通过第二组钢丝绳分别作用于第一过渡轮、第二过渡轮时,通过第一固定绳轮、第二固定绳轮可实现近端指骨的屈曲伸展运动,此时第一驱动组件和第三驱动组件不启动。在发明中,屈曲伸展运动包括中段指骨的屈曲伸展运动、近端指骨的屈曲伸展运动以及两个之间的交互耦合运动;当第三驱动组件的驱动力矩施加于转动副j6上,具体地,当第三驱动组件驱动转动副j6顺时针运动时,转动副j4逆时针运动,通过第二驱动组件的配合启动,能够分别实现手指中段指骨和近端指骨的屈曲运动,同时受到闭链运动学约束,移动副j5、转动副j3、转动副j7产生相应的运动;驱动转动副j6顺时针运动可以看作两部分:一部分是产生中段指骨的屈曲运动,另一部分是抵消掌指关节传动组件部分产生的耦合运动;同理两个转动副产生相反方向的运动而能使手指进行伸展运动。
81.进一步地,参照附图9,图9是本发明具有内收外展和屈曲伸展的手指康复外骨骼机器人的内收外展的一种具体实施例的运动示意图;第一驱动组件驱动转动副j2逆时针运动(即内外驱动绳轮逆时针运动),内外驱动绳轮依次带动换向连杆、指基连杆可实现手指的外展运动;受到闭链运动学约束,移动副j1、转动副j3、移动副j5、转动副j4、转动副j6、转动副j7产生相应的运动;需要说明的是,为了消除该运动造成掌指关节和近端关节的耦合伸展运动,此时可通过第三驱动组件控制转动副j6顺时针运动以转动副j4逆时针运动;同理转动副j2产生相反运动时而能手指进行内收运动。
82.通过本发明的结构设计,能够控制手指关节进行独立运动:掌指关节的内收外展运动和屈曲伸展运动以及近端关节的屈曲伸展运动;串联连杆与手指骨节形成闭链结构,能够实现人机关节之间的自适应对齐;掌指关节的移动副直接与手指连接而消除机构对手指的沿着手指方向的力,以及通过绳传动对外骨骼关节施加相同的驱动力矩而消除手指另两个正交方向的机械应力,从而能够避免手指康复外骨骼机器人对手指关节产生机械应力;本发明在具有同样多自由度情况下降低了结构的复杂性,同时提高精度情况下,更接近康复训练的实际情况。
83.不同于现有的手指康复外骨骼机器人,本发明在手指上仅仅设置了两组驱动组件,即仅在中段指骨和近端指骨上设置驱动组件,而未在末端指骨设置,但是本发明依旧可以实现末端指骨的训练,因为人类手指运动并非完全独立的,人类每根手指上近端关节与
末端关节的运动并非完全独立的;近端关节(中段指骨与近端指骨的铰接处)和末端关节(末端指骨与中段指骨的铰接处)之间的运动有一定的耦合关系,因此只需要控制末端指骨与中段指骨的铰接处、中段指骨与近端指骨的铰接处的运动,即可实现手指地全面康复训练。
84.虽然已经参考优选实施例对本发明进行了描述,但在不脱离本发明的范围的情况下,可以对其进行各种改进并且可以用等效物替换其中的部件,尤其是,只要不存在结构冲突,各个实施例中所提到的各项技术特征均可以任意方式组合起来。本发明并不局限于文中公开的特定实施例,而是包括落入权利要求的范围内的所有技术方案。
85.在本发明的描述中,术语“中心”、“上”、“下”、“左”、“右”、“竖直”、“水平”、“内”、“外”等指示方向或位置关系的术语是基于附图所示的方向或位置关系,这仅仅是为了便于描述,而不是指示或暗示所述装置或元件必须具有特定的方位、以特定的方位构造和操作,因此不能理解为对本发明的限制。此外,术语“第一”、“第二”、“第三”仅用于描述目的,而不能理解为指示或暗示相对重要性。
86.此外,还需要说明的是,在本发明的描述中,除非另有明确的规定和限定,术语“安装”、“相连”、“连接”应做广义理解,例如,可以是固定连接,也可以是可拆卸连接,或一体地连接;可以是机械连接,也可以是电连接;可以是直接相连,也可以通过中间媒介间接相连,可以是两个元件内部的连通。对于本领域技术人员而言,可根据具体情况理解上述术语在本发明中的具体含义。
87.术语“包括”或者任何其它类似用语旨在涵盖非排他性的包含,从而使得包括一系列要素的过程、物品或者设备/装置不仅包括那些要素,而且还包括没有明确列出的其它要素,或者还包括这些过程、物品或者设备/装置所固有的要素。
88.至此,已经结合附图所示的优选实施方式描述了本发明的技术方案,但是,本领域技术人员容易理解的是,本发明的保护范围显然不局限于这些具体实施方式。在不偏离本发明的原理的前提下,本领域技术人员可以对相关技术特征做出等同的更改或替换,这些更改或替换之后的技术方案都将落入本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1