一种基于意图识别的动力型多自由度助行下肢外骨骼机器人的制作方法
1.本发明涉及康复医疗和保健技术领域,具体地说,涉及一种基于意图识别的动力型多自由度助行下肢外骨骼机器人。
背景技术:
2.我国很多老年人患有心脑血管疾病,这种疾病极易导致偏瘫、半身不遂甚至截瘫。此外,由于意外损伤导致下肢瘫痪的患者也与日俱增。长期卧床很容易引发脏器功能衰退、肌肉萎缩等并发症。临床医学表明,下肢失能或弱能的人群如果能适时保持站立、简单行走,能够促进血液循环改善患者消化系统功能,对于肌肉萎缩有很好的治疗效果;并且站立与行走可极大的提高患者对生活的自信心,对于减少忧郁、悲观心理和改善睡眠质量有很大的帮助。因此,如何帮助患者重新站立和行走有很重要意义。
3.发明专利202010279121.x公开了“一种蓄电池助力行走及攀爬楼梯多功能轮椅”,该多功能轮椅可带着患者攀爬楼梯,但电动轮椅只能起到代步功能,无法让患者的下肢得到锻炼。目前国内外已有的主流下肢外骨骼在使用时需配合拐杖使用,对与上肢力量不足的患者,无法使用拐杖来保持自身平衡。在发明专利201910537846.1公开了“一种下肢外骨骼可调节安装架、方法及其下肢康复设备”,其主要包括下肢外骨骼可调节安装架、下肢外骨骼、移动框架、外骨骼高度和宽度调节装置、靠背板纵深调节装置,下肢外骨骼、外骨骼高度和宽度调节装置、靠背板纵深调节装置共同安装在移动框架上,移动框架使用定向轮、万向轮无法为患者提供额外动力,且其下肢外骨骼主动自由度较少。发明专利201810154134.7提出了“一种轮足同构变形式轮椅外骨骼机器人”,该外骨骼机器人包括腰部、可折叠轮椅架、两个大腿和两个小腿,该外骨骼机器人可在外骨骼形态和轮椅形态之间相互转换。但在外骨骼形态下仍需使用拐杖保持平衡。现有助行下肢外骨骼使用过程中,对与上肢力量不足的患者,无法使用拐杖来保持自身平衡;现有下肢外骨骼主动自由度少,动作僵硬且造价昂贵;支撑框架功能较单一。
技术实现要素:
4.为了避免现有技术存在的不足,本发明提出一种基于意图识别的动力型多自由度助行下肢骨骼机器人。
5.本发明解决其技术问题所采用的技术方案是:包括下肢外骨骼、动力型移动框架,下肢外骨骼与动力型移动框架连接,其特征在于所述下肢外骨骼为左右对称结构,小电机固定在脚板的电机安装架上,曲柄、连杆、小连杆、脚板组成四连杆机构;曲柄安装在电机轴上,小电机通过连杆机构传动驱动脚板外展、内收自由度的转动,脚板和踝关节摆动块通过销轴转动连接,踝关节摆动块和踝关节俯仰块连接,踝关节俯仰块固定在小腿板上,电推杆安装架固定于小腿板的中部,电推杆底部与电推杆安装架铰接,电推杆推杆顶部与踝关节摆块后部的安装孔铰接,绑带支架固定于小腿板的中部,绑带支架的两端安装有压力传感器用于检测患者与下肢外骨骼之间的交互力,小腿板中部安装有陀螺仪,用于测量小腿的
姿态与运动信息;
6.小腿长度调节压块、销轴、小腿长度调节架、小腿长度调节螺钉、小腿板组成小腿长度调节机构;小腿长度调节压块通过销轴固定在小腿长度调节架上,小腿长度调节压块和小腿长度调节架中间形成一个方形孔,小腿板插入方形孔中,通过调节小腿长度调节螺钉来调节小腿的长度;膝盖左支板、膝盖支板位于小腿长度调节架的两侧,膝盖左支板、膝盖支板安装在膝盖电机轴的两端,膝盖限位板安装在膝盖电机上,膝盖电机与大腿板固连;
7.大腿长度调节压块、大腿长度调节架、大腿长度调节螺钉和大腿板组成大腿长度调节机构,大腿长度调节压块固定在大腿长度调节架上,大腿长度调节压块和大腿长度调节架中间形成一个方形孔,大腿板插入孔中,通过大腿长度调节螺钉可调节大腿的长度;绑带架固定在大腿长度调节架上,绑带架的两端安装有压力传感器用于检测患者与下肢外骨骼之间的交互力,大腿长度调节架中部安装有陀螺仪用于测量大腿的姿态与运动信息;
8.舵机安装架固定在大腿长度调节架内侧,舵机固定在舵机安装架上,大腿长度调节架与髋关节平板固连,髋关节平板与髋关节支架铰接,舵机转轴与舵盘连接,舵盘固定在髋关节支架上,髋关节左支板、髋关节右支板安装在髋关节支架的两侧,髋关节左支板、髋关节右支板安装在髋关节电机轴的两端,髋关节电机与髋关节绑带架通过螺栓固连;
9.髋关节绑带架、髋关节支架、调节螺钉组成髋关节纵深调节机构,髋关节绑带架与髋关节支架连接,髋关节支架下方设有调节孔,通过调节纵深调节螺钉可调节髋关节纵深长度;髋关节支架与腰部长板连接,髋关节大转轴与腰部长板固连,髋关节转轴穿过髋关节支架后装入复位弹簧可使髋关节外展内收后恢复至平衡位置;髋关节支架上设有限位孔与腰部长板上的凸台配合,髋关节配有销可对髋关节外展、内收自由度进行锁定或解除锁定;
10.腰部长板、外骨骼宽度调节块、宽度调节螺钉组成宽度调节机构;外骨骼宽度调节块有方形通孔,底部开有调节孔,腰部长板由方孔插入与外骨骼宽度调节块连接,通过宽度调节螺钉调节下肢外骨骼的宽度;滑块固定于外骨骼宽度调节块的后部,背板与外骨骼宽度调节块连接;背板上安装有背部电机,齿轮安装在背部电机轴端,半齿轮固定与外骨骼宽度调节块上端,并与齿轮组成齿轮传动机构,背部电机通过齿轮传动机构带动背板做偏航转动,背板两侧安装有压力传感器,用于检测患者背部运动意图;
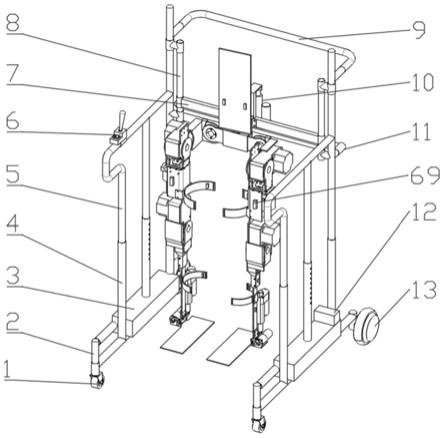
11.所述动力型移动框架包括高度调节机构,重心微调机构,快速连接装置,电动轮毂固连在底部横架后端,万向轮固连在底部横架前端,脚蹬安装在底部横架的前端,电池箱与底部横架固连,控制箱安装于电池箱上部,扶手架与底部横架通过对应的三个孔位套接,后托板与扶手架固连,导杆与扶手架固连,重心微调板与导杆连接,后电推杆与后托板固连并与重心微调板通过螺栓连接,摇杆装置固定于扶手架的前端,后扶手安装在扶手架的后端,用于同行者搭扶使用;扶手架与底部横架组成动力型移动框架的高度调节机构,通过调节底部横架中间支撑管上的调节孔位来调节动力型移动框架的整体高度;下肢外骨骼通过动力型移动框架上的快速连接装置与重心微调板固连,导杆、后托板、重心微调板、后电推杆组成重心微调机构;通过控制后电推杆的伸缩带动重心微调板上下滑动来微调患者和下肢外骨骼重心的高低;
12.快速连接装置包括连接架、底部限位板、螺栓、锁定销、小弹簧、螺母、柱销、上压板,连接架后端设有安装孔并通过螺栓与重心微调板固连,前端开有燕尾槽与外骨骼宽度调节块上安装的滑块配合,连接架前端的燕尾槽用于适应患者在行走过程中的重心波动,
8.导杆 9.后扶手 10.后电推杆 11.后托板 12.控制箱 13.电动轮毂 14.脚板 15.曲柄 16.连杆 17.小连杆 18.小电机 19.踝关节俯仰块 20.踝关节摆动块 21.小腿板 22.电推杆 23.绑带支架 24.安装架 25.小腿长度调节架 26.销轴 27.膝盖左支板 28.膝盖支板 29.膝盖限位板 30.膝盖电机 31.大腿板 32.小腿长度调节压块 33.小腿长度调节螺钉 34.绑带架 35.大腿长度调节架 36.舵机 37.舵机安装架 38.舵盘 39.髋关节支架 40.髋关节左支板 41.髋关节电机 42.髋关节右支板 43.髋关节绑带架 44.髋关节支架 45.锁销 46.髋关节转轴 47.腰部长板 48.大腿长度调节压块 49.大腿长度调节螺钉 50.髋关节平板 51.调节螺钉 52.螺母 53.复位弹簧 54.外骨骼宽度调节块 55.半齿轮 56.滑块 57.连接架 58.螺栓 59.底部限位板 60.小弹簧 61.弹簧螺母 62.柱销 63.锁定销 64.上压板 65.齿轮 66.背部电机 67.背板 68.压力传感器 69.陀螺仪
具体实施方式
36.本实施例是一种基于意图识别的动力型多自由度助行下肢外骨骼机器人。
37.参阅图1~图16,本实施例动力型多自由度助行下肢外骨骼机器人,由下肢外骨骼、动力型移动框架组成;下肢外骨骼通过动力型移动框架上的快速连接装置与动力型移动框架连接为一个整体。使用过程中动力型移动框架承担了下肢外骨骼和患者的绝大部分重量,为患者提供可靠支撑和水平方向助力。在长时间使用后所述动力型移动框架还可以为患者提供休息。
38.下肢外骨骼为左右对称结构;以右腿为例进行描述,其中脚板14上设有电机安装架,小电机18,通过螺栓固定在脚板14上的电机安装架。曲柄15、连杆16、小连杆17、脚板14共同组成四连杆机构。曲柄15安装在电机轴上,小电机18通过连杆机构传动驱动脚板14外展、内收自由度的转动。脚板14和踝关节摆动块20通过对应的安装孔使用销轴转动连接。踝关节摆动块20和踝关节俯仰块19转动连接。踝关节俯仰块19通过螺栓固定在小腿板21上,电推杆安装架24使用螺栓固定于小腿板21的中部。电推杆22底部与电推杆安装架24铰接,电推杆22与踝关节摆块20后部的安装孔铰接。绑带支架23通过螺栓固定于小腿板21的中部。绑带支架23的两端安装有压力传感器68用于检测患者与下肢外骨骼之间的交互力。小腿板21中部安装有一个陀螺仪69,用于测量小腿的姿态与运动信息。
39.小腿长度调节压块32、销轴26、小腿长度调节架25、小腿长度调节螺钉33、小腿板21共同组成小腿长度调节机构。其中小腿长度调节压块32通过对应的孔位,使用销轴26固定在小腿长度调节架25上,小腿长度调节压块32和小腿长度调节架25,中间形成一个方形孔,小腿板21由此孔插入。通过调节小腿长度调节螺钉33即可调节小腿的长度。
40.膝盖左支板27、膝盖支板28使用螺栓安装在小腿长度调节架25的两侧。膝盖左支板27、膝盖支板28通过顶端对应的孔位,安装在膝盖电机轴的两端。膝盖限位板29通过螺栓安装在膝盖电机30上起限位作用。膝盖电机30与大腿板31通过螺栓固定。
41.大腿长度调节压块48、大腿长度调节架35、大腿长度调节螺钉49和大腿板31共同组成大腿长度调节机构。其中大腿长度调节压块48通过螺栓固定在大腿长度调节架35上,大腿长度调节压块48和大腿长度调节架35,中间形成一个方形孔,大腿板31由此孔插入,通过调节大腿长度调节螺钉49,即可调节大腿的长度。
42.绑带架34使用螺栓固定在大腿长度调节架35上。绑带架34的两端安装有压力传感
器68用于检测患者与下肢外骨骼之间的交互力。大腿长度调节架35中部安装有一个陀螺仪69用于测量大腿的姿态与运动信息。
43.舵机安装架37使用螺栓固定在大腿长度调节架35内侧舵机36使用螺栓固定在舵机安装架37上。大腿长度调节架35通过螺栓与髋关节平板50固定,髋关节平板50与髋关节支架39铰接且中心留有通孔,舵机转轴通过中间的通孔与舵盘38连接。舵盘38通过螺栓固定在髋关节支架39上。由此舵机36便可驱动大腿进行旋内/旋外动作。髋关节左支板40、髋关节右支板42通过螺栓安装在髋关节支架39的两侧。髋关节左支板40、髋关节右支板42通过顶端对应的孔位,安装在髋关节电机轴的两端,髋关节电机41与髋关节绑带架43通过螺栓固定。
44.髋关节绑带架43、髋关节支架44、调节螺钉51共同组成髋关节纵深调节机构。其中髋关节绑带架43与髋关节支架44通过髋关节支架44内部的凹槽滑动连接。髋关节支架44下方设有调节孔,通过调节纵深调节螺钉51即可调节髋关节纵深长度。髋关节支架44与腰部长板47转动连接。髋关节转轴46通过螺栓与腰部长板47固定。髋关节转轴46一侧有螺纹,髋关节转轴46穿过髋关节支架44后,装入复位弹簧53,使用螺母52将复位弹簧53固定。复位弹簧53可使髋关节外展内收后恢复至平衡位置。髋关节支架44上设有限位孔与腰部长板47上的凸台配合,组成机械限位,可防止患者受伤。另髋关节配有一个锁销45。插入锁销45即可对髋关节外展/内收自由度进行锁定。在需要进行外展/内收活动时,拔下锁销45即可解除锁定。
45.腰部长板47、外骨骼宽度调节块54、宽度调节螺钉共同组成宽度调节机构。其中外骨骼宽度调节块54开有方形通孔,底部开有调节孔,腰部长板47由方孔插入与外骨骼宽度调节块54滑动连接,通过调节宽度调节螺钉即可调节下肢外骨骼的宽度。
46.滑块56通过螺栓固定于外骨骼宽度调节块54的后端。背板67与外骨骼宽度调节块54转动连接。背板67上安装有背部电机66,齿轮65安装与背部电机轴顶端。半齿轮55固定与外骨骼宽度调节54块上端,与齿轮65组成齿轮传动机构,背部电机66通过齿轮传动机构带动背板67做偏航转动。背板67两侧安装有压力传感器68,用于检测患者背部运动意图。
47.在下肢外骨骼的小腿长度调节机构、大腿长度调节机构、髋关节纵深调节机构、宽度调节机构的共同调节下,可适应不同高矮胖瘦的人群。
48.本实施例中,动力型移动框架包括高度调节机构,重心微调机构,快速连接装置。其中,电动轮毂13固连在底部横架4后端,电动轮毂13用于患者自助行走时为患者提供水平方向助力、保持或调节行走方向,并且带有刹车功能。万向轮1固连在底部横架4前端,万向轮1用于行走时调节行走方向。脚蹬2安装在底部横架4的前端在轮椅模式下供患者放脚休息使用。电池箱3与底部横架4固连,控制箱12安装于电池箱3上端。扶手架5与底部横架4通过对应的三个孔位套接,后托板11与扶手架5固连,导杆8与扶手架5固连,重心微调板7与导杆8滑动连接。后电推杆10通过螺栓与后托板11固连、与重心微调板7通过对应的安装孔使用螺栓固连。摇杆装置6固定于扶手架5的前端。后扶手9安装在扶手架44的后端,用于同行者搭扶使用。
49.本实施例中,扶手架5与底部横架4共同组成所述动力型移动框架的高度调节机构。通过调节底部横架4中间支撑管上的调节孔位可调节动力型移动框架的整体高度。下肢外骨骼通过动力型移动框架上的快速连接装置与重心微调板7固连。导杆8、后托板11、重心
微调板7、后电推杆10共同组成重心微调机构。通过控制后电推杆10的伸缩带动重心微调板7上下滑动来微调患者和下肢外骨骼重心的高低。
50.本实施例中,快速连接装置包括连接架57、底部限位板59、螺栓58、锁定销63、小弹簧60、螺母61、柱销62、上压板64。其中,连接架57后端设有安装孔,通过螺栓与重心微调板7固连,前端开有燕尾槽,与外骨骼宽度调节块54上安装的滑块56配合。连接架前端的燕尾槽用于适应患者在行走过程中的重心波动。底部限位板59通过螺栓58安装在连接架57燕尾槽下端防止下肢外骨骼从下端滑脱。上压板64通过柱销62与连接架57转动连接。螺母61将锁定销63、小弹簧60固定在连接架57侧面的圆柱上。上压板64前端开有圆孔,与连接架57侧面圆孔相对应,锁定销63在小弹簧60的作用下将上压板64与连接架57牢牢锁定,向外拔起锁定销63即可打开上压板64。如此便可实现下肢外骨骼与动力型移动框架的快速连接或拆卸。
51.本实施例所使用的电机均内置有编码器,用来反馈电机旋转位置的信息。
52.本实施例中,下肢外骨骼采用人体工程学和仿生学设计,其中单腿设有6个自由度,腰部设有1个自由度。腿部自由度分布为:髋关节3个自由度,分别对应外展/内收、旋内/旋外、伸展/弯曲,其中伸展/弯曲和旋内/旋外,2个自由度装有助力电机,为主动自由度,外展/内收为被动自由度;膝关节设1个装有助力电机的伸展/弯曲自由度;踝关节2个自由度,分别为伸展/弯屈、外展/内收,且均装有助力电机。
53.下肢外骨骼具备三种助力模式:被动模式、主动模式、和主被动结合模式。其中被动模式主要应对患者下肢完全失去知觉的情况,下肢外骨骼以设定好的步态动作带动患者运动;在患者恢复较弱的运动能力时主被动结合模式可检测患者运动意图,在患者尝试运动时,下肢外骨骼以患者意图为主进行助力,在患者无意识状态下自动切换至被动模式。主动模式在患者恢复至一定运动能力时,完全依靠患者运动意图控制下肢外骨骼运动。
54.使用方法
55.患者通过绑带将下肢外骨骼绑定,调节底部横架中间支撑管上的高度调节孔,调节动力型移动框架至合适高度。摇杆装置6上有按钮和摇杆,按钮用于开关下肢外骨骼、切换助力模式或控制部位;摇杆用于实际操控。患者可选择通过摇杆装置6操控重心微调机构调节自身与下肢外骨骼的重心高度,使脚底与地面接触或腾空。
56.被动模式:患者通过摇杆装置操控下肢外骨骼及动力型移动框架。
57.在患者脚底与地面接触情况下,向前推动摇杆装置6上的摇杆,下肢外骨骼通过各关节电机以程序设定好的动作带动患者下肢做行走动作,同时电动轮毂通电以普通人行走速度正向转动,此时患者与下肢外骨骼动力型外框架保持直行;向左推动摇杆,左电动轮毂与右电动轮毂差速转动,下肢外骨骼做转弯动作从而实现左转;后退和右转过程与直行和左转过程相反。在患者双脚腾空情况下,下肢外骨骼带动患者下肢做如高抬腿的大幅度动作;患者通过摇杆装置6对装有助力电机的5个自由度单独控制,针对下肢某个关节进行强化训练。
58.主被动结合模式:当患者恢复或具备较弱运动能力开始尝试运动时,被动模式可能会出现下肢外骨骼动作与患者运动意图不一致。此模式下,下肢外骨骼先按照程序设定好的动作运行,当患者想要以自己的意图运动迈腿时,控制程序通过传感器识别患者意图并对下肢外骨骼实时做出调整,进而控制下肢外骨骼匹配患者的动作意图。当患者不想按
照自己意图运动时,下肢外骨骼自动切换至程序设定好的步态动作,带动患者下肢运动。
59.主动模式:患者具备一定运动能力后可使用主动模式,此时下肢外骨骼完全依靠患者自身意图进行运动。
60.运动意图识别过程:陀螺仪测量得到患者大、小腿的3轴角速度和3轴重力加速度,程序根据这些数据判断出患者所做动作是离散动作还是连续动;将陀螺仪数据通过姿态解算得到当前患者大小腿所处姿态,进而解算出髋关节和膝关节关节角度;在判断出患者做出连续动作后将姿态解算得到的关节角度后通过卡尔曼滤波法预测下一时刻的关节角度,将预测的关节角度作为步态轨迹规划的参数,规划下肢外骨骼的步态轨迹,最后输出控制下肢外骨骼电机做出相应动作;与此同时关节电机内置的编码器将电机动作情况作为反馈返回步态轨迹规划,以此形成一个半闭环控制。当检测患者的动作为离散动作时,下肢外骨骼会保持患者停止运动时的姿态。
61.另外不管下肢外骨骼处于何种工作模式,压力传感器会实时监测下肢外骨骼与患者之间的交互力,控制程序会控制交互力处于一个适当的范围,增强患者的使用舒适性。一旦交互力超过设定的安全值,外骨骼将会进入断电保护状态,防止发生意外故障对患者造成伤害。
62.另外,患者可通过摇杆装置6控制下肢外骨骼的背板67后侧安装的背部电机66带动上半身做转体运动。患者上半身具备运动能力时,控制箱会实时监测背板67两侧压力传感器的数据,当患者有向左转身动作时,背板67左侧压力传感器压力值增大右侧压力传感器压力值减小,此时控制箱便控制背部电机66带动患者上半身左转。右转过程与左转过程相反。
63.患者在长时间使用后可通过底部横杆中间钢管上的调节孔,降低动力型外框架的高度,转动左脚蹬、右脚蹬与底部横杆垂直,双脚踩上脚蹬。此时动力型移动框架变形作简易轮椅供患者休息使用,在此状态下动力型移动框架可为患者提供一个较快的移动速度,使下肢外骨骼更具灵活性。
64.在患者上肢力量足以使用拐杖保持身体平衡时,可将下肢外骨骼从动力型移动框架上拆下搭配拐杖使用,以减小外骨骼的体积。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1