一种具有定位功能的针刀的制作方法
[0001]
本实用新型涉及医学器械领域,特别是涉及一种中医中的针刀。
背景技术:
[0002]
1976年,朱汉章教授发明了针刀技术,至今,针刀技术已经发展成为针刀医学,针刀医学是基于现代针灸学和外科技术发展而成的一门新兴交叉学科。这门学科刚刚走过40多年的历程,从事针刀治疗的从业者大多数来自基层,因治疗效果确切,得到广大患者的认可,近年逐渐得到学界认可并深入研究。
[0003]
人体肌筋膜等软组织具有通道功能,周围神经和血管走行与软组织或软组织与骨构成的通道中,通常情况下该通道容纳并限制其活动,同时提供支持保护作用。但当通道内压力增高时,可压迫神经和血管,如果在颈部,除了局部疼痛外,由于血液供应减少导致头晕、头痛、失眠等。针刀医疗方案可以有效治愈这一病痛,在针刀刺入组织过程中,会穿透不同质地组织,在使用中,医生需要通过经验去判断针刀位置是否正确刺入病变部位。
[0004]
然而在现有技术中,针刀刺入到达病变部位只能通过经验进行判断,缺少相应的技术和数据指导医生行刀,尤其是针对新手医生,只能通过老师教授和大量试验摸索,掌握此项技术难度较大。
技术实现要素:
[0005]
为此,需要提供一种具有定位功能的针刀,用于解决现有技术中,缺少相应的技术和数据确定针刀在行刀过程的刺入位置,针刀行刀过程全凭借经验判断针头位置的技术问题。
[0006]
为实现上述目的,发明人提供了一种具有定位功能的针刀,该具有定位功能的针刀包括针柄、针刀体和定位模块;
[0007]
所述针刀体的一端连接于所述针柄,所述针刀体的另一端为针刀头;
[0008]
所述定位模块包括惯性传感器,所述惯性传感器设置于针柄上用于采集针刀在行刀过程的加速度数据,所述定位模块根据所述加速度数据判断针刀头的位置。
[0009]
进一步的,还包括显示模块,所述显示模块设置于针刀体之外,并通过有线或无线方式与所述定位模块连接,用于显示定位模块的检测数据。
[0010]
进一步的,还包括肌内压检测模块;
[0011]
所述针柄连接有两根所述针刀体,两根所述针刀体平行设置且具有间距;
[0012]
所述肌内压检测模块与两根所述针刀体电连接,用于向两根所述针刀体施加电压,以及采用两根所述针刀体的微电流,并根据所述微电流计算肌内压。
[0013]
进一步的,所述针刀体与所述针柄可拆卸连接。
[0014]
进一步的,所述针柄内具有容置腔,空置腔内设置有电池以及定位模块和肌内压检测模块。
[0015]
进一步的,还包括感应开关,所述感应开关设置于所述针柄表面手持部对应的位
置,用于检测针刀是否被拿起,针刀在检测到被拿起时触发所述定位模块和肌内压检测模块。
[0016]
进一步的,所述感应开关包括光敏开关。
[0017]
进一步的,还包括数据发送模块,所述数据发送模块用于将所述加速度数据发送给后台服务器,所述后台服务器根据所述加速度数据判断针刀头的位置,并输出对应的提示信息。
[0018]
为解决上述技术问题,本实用新型还提供了另一技术方案:
[0019]
一种针刀定位方法,包括以下步骤:
[0020]
通过惯性传感器检测针刀在行刀过程的加速度数据;
[0021]
根据所述加速度数据判断针刀头的位置。
[0022]
进一步的,所述“通过惯性传感器检测针刀在行刀过程的加速度数据”包括:在行刀过程实时监测惯性传感器采集的加速度数据;
[0023]
所述“根据所述加速度数据判断针刀头的位置”包括:并判断当前加速度值是否大于预设值,若是则判定针刀头已行进至下一组织,并输出提示信息。
[0024]
区别于现有技术,上述技术方案结合针刀技术和惯性传感器的测定方法,在针刀上设置惯性传感器,并在行刀过程中采集针刀的加速度数据,并对针刀的加速度值进行判定,由于针刀行刀过程遇到不同组织部分的阻碍值引起,针刀刀头加速度值数据会发生变化,因此通过分析所述加速度数据,可解算出针刀刀头的位置。通过本实用新型可以辅助针刀治疗和协助新手医生快速掌握针刀技术,可以提高针刀治疗时行针的准确性,提高针刀诊断的准确性,为针刀治疗提供精准的数据支持。
附图说明
[0025]
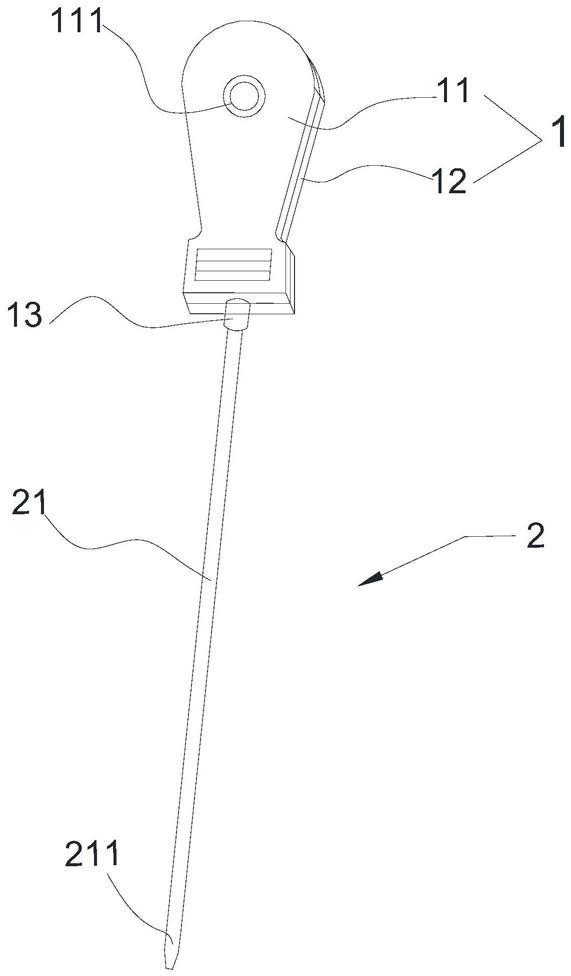
图1为具体实施方式所述具有定位功能的针刀的结构图;
[0026]
图2为具体实施方式所述针刀定位系统的示意图;
[0027]
图3为具体实施方式所述惯性传感器的电路图;
[0028]
图4为具体实施方式所述无线发送模块的电路图;
[0029]
图5为具体实施方式所述惯性传感器所采集的加速度数据;
[0030]
图6为具体实施方式所述针刀的角速度数据;
[0031]
图7为另一实施方式所述具有定位功能的针刀的结构图;
[0032]
图8为具体实施方式针刀行刀诊疗时的示意图;
[0033]
图9为具体实施方式针刀的电路模块图;
[0034]
附图标记说明:
[0035]
1、针柄;
[0036]
11、上壳体;
[0037]
12、下壳体;
[0038]
13、装配孔;
[0039]
111、感应开关;
[0040]
2、针刀体;
[0041]
21、针刀体一;
[0042]
211、针刀头;
[0043]
22、针刀体二;
[0044]
221、针刀头;
具体实施方式
[0045]
为详细说明技术方案的技术内容、构造特征、所实现目的及效果,以下结合具体实施例并配合附图详予说明。
[0046]
请参阅图1至图9,本实施例提供了一种具有定位功能的针刀。该具有定位功能的针刀包括针柄1、针刀体2和定位模块。
[0047]
其中,所述针刀体2可具有一根以上的针刀体,如图1所示,该针刀具有一个针刀体一21,针刀体的一端连接于所述针柄1,所述针刀体2的另一端为针刀头。
[0048]
所述定位模块包括惯性传感器,所述惯性传感器设置于针柄1上用于采集针刀在行刀过程的加速度数据,所述定位模块根据所述加速度数据判断针刀头的位置。
[0049]
具体的,所述针柄1包括上壳体11和下壳体12,所述上壳体11和下壳体12盖合在一起形成内部具有容置腔的针柄,所述定位模块以及为定位模块供电的电源(钮扣电池)设置于容置腔内。
[0050]
上述针刀体2与针柄1的结构与功能与现有的针刀结构相同,所以就不具体说明。
[0051]
如图3所示,为具体实施方式所述惯性传感器的电路图,该惯性传感器采用bmi160陀螺仪芯片,bmi160为博士公司的6轴陀螺仪,将其应用于针刀中可检测针刀多方位的加速度数据。在行刀过程中,惯性传感器可高速高频(采样频率在每秒1000次以上)采集针刀在插入组织时的加速度数据,该加速度数据反映的是针刀行刀过程中针刀头的抖动情况。如图5所示为惯性传感器采集得到加速度数据的波形图,由图5可知,在针刀行进过程中,加速度数据波形图中出现有明显的几个波峰,该波峰所对应的时刻即针刀在行刀时抖动较大的时刻。由于针刀行刀过程遇到如皮肤,肌肉、韧带、筋膜、骨面不同组织部分的阻碍值不同,从而引起针刀刀头加速度值数据会发生变化,因此通过分析所述加速度数据,可解算出针刀刀头的位置。通过本实用新型可以辅助针刀治疗和协助新手医生快速掌握针刀技术,可以提高针刀治疗时行针的准确性,提高针刀诊断的准确性,为针刀治疗提供精准的数据支持。
[0052]
在具体实施方式中,所述定位模块实时监测(优选为每秒1000次以上)惯性传感器采集的加速度数据,并判断当前加速度值是否大于预设值,若是则判定针刀头已行进至下一组织,并输出提示信息。该预设值可由经验丰富的医生行刀时检测得到并预存于后台服务器中。其中,当前加速度值是否大于预设值可通过比较器电路实现,比较器电路的一输入端连接参照电压,比较器的另一输入端连接所述惯性传感器的输出端,将惯性传感器采集的加速度数据的电压与参照电压进行比较,从而通过比较器电路实现判断当前加速度值是否大于预设值。
[0053]
如图6所示,在另一些实施方式中,还通过陀螺仪芯片采集针刀的角速度数据,并结合针刀的角速度数据做为针刀头位置的辅助判断数据。该角速度数据主要用于反映医生在行刀时手腕的角速度,通过医生手腕的角速度辅助判断施针的阶段或针刀头的位置,例如当检测到角速度不变化时,此时证明施针完毕。
[0054]
为了使惯性传感器采集的加速度数据能够传输至针刀外部,该针刀还设置有数据发送模块,通过该数据发送模块可将惯性传感器采集的加速度数据后台服务器,因此可由后台服务器对加速度数据进行分析处理,并计算出针刀头当前所刺入的位置。优选的,所述数据发送模块为无线发送模块,该无线发送模块可以为现有技术中常用的蓝牙、nfc、2.4g无线模块等近场无线传输技术。如图4所示,在一实施方式中,所述数据发送模块选用nrf2401无线芯片。nrf2401无线芯片工作于2.4ghz全球开放ism频段,工作速率0~2mb/s,外围元件极少,内置硬件crc(循环冗余校验)和点对多点通信地址控制,集成了频率合成器,并具有工作电压低(1.9~3.6v),高速率(2mbps),多频点以及超小体积等优点,从而可将其设置于针柄1的容置腔内。
[0055]
当然,在其他实施方式中,也可以在针柄上设置usb口、串口等有线传输接口,并通过有线方式将数据发送给后台服务器。
[0056]
优选的,为了使具有定位模块的针柄可重复使用,所述针刀体2与所述针柄1可通过拆卸方式连接。具体的,如图1所示,在针柄上设置有针刀体一21的端部相适配的装配孔13,针刀体一21的端部可插入装配孔13内,而将使用之后,可将该针刀体一21拨出,并更换新的未使用的针刀体。在一些实施方式中,为防止在行刀过程中针刀体脱落,针刀体与装配孔可采用过盈配合或设置卡接结构。
[0057]
如图1所示,为了方便操作,所述针刀还包括感应开关111,所述感应开关111设置于所述针柄表面手持部对应的位置,用于检测针刀是否被拿起,并在针刀在检测到被拿起时触发所述定位模块采用针刀的加速度数据。而当针刀被放下时,感应开关111复位,定位模块停止采集针刀的加速度数据。优选的,所述感应开关包括光敏开关,当针刀被拿起时,光敏开关被手指遮挡,所检测到的光亮值明显下降,因此通过光敏开关所检测到的光亮值变化可检测针刀是否被拿起。选用光敏开关做为感应开关具有体积小等优点,非常适用于针柄这样小体积物体上。而在其他实施方式中,感应开关111还可以选用电容式感应开关、红外感应开关等等。
[0058]
如图2所示,为一实施方式中,多个针刀通过数据发送模块以及无线hub与后台服务器连接的示意图,其中,每个针刀具有上述的惯性传感器,该惯性传感器用于采集针刀在行刀时的加速度数据,并通过数据发送模块(无线发送模块)与无线数据hub连接,最后由无线数据hub汇总各针刀的加速度数据发送给后台服务器,由后台服务器对各针刀的加速度数据进行分析判断,得到针刀头当前所在的位置,后台服务器可根据判断结果输出对应的提示信息,例如通过显示屏(即显示模块)显示各针刀头的当前位置,或通过语音提示针刀头的当前位置。其中,所述后台服务器是指独立于针刀之外的具有数据处理和运算的计算机设备,其可以是pc机、平板电脑、智能手机等等。图2所示的实施方式适合针刀教学应用场景,多名教学对象行刀时的数据可由一台后台服务进行计算。
[0059]
如图7所示,在另一实施方式中,针刀除了具有定位功能,还可以计算组织内的肌内压。具体的,所述针刀的针柄1连接有两个针刀体,即针刀体一21和针刀体二22,并且针刀体一21和针刀体二22连接有肌内压检测模块。其中,所述肌内内压检测模块是通过检测微电流在流过肌肉组织时,计算通过u/i肌肉组织的电阻,不同紧张程度的肌肉电阻各不相同,即使是同一人体紧张的肌肉含水量少,松弛的肌肉含水量低,进而影响肌肉组织的电阻。在检测所述微电流时,可以由控制电路产生矩形脉冲波,矩形脉冲波通过肌肉组织后,
会产生衰减,计算衰减值,得出衰减电压u0,换算r=u0/i。计算电阻的变化和大小,就可以得出肌肉紧张程度。
[0060]
针刀体一21和针刀体二22长度相当,针刀体一21和针刀体二22平行设置且具有间距;所述肌内压检测模块与针刀体一21和针刀体二22电连接,肌内压检测模块用于向两根所述针刀体施加电压,其中,一个针刀体为正极,另一针刀体为负极,以及采用两根所述针刀体的微电流,并根据所述微电流计算肌内压。
[0061]
如图8所示,为具有针刀体一21和针刀体二22以及肌内压检测模块的针刀在行刀诊疗时的示意图。其中,针刀体一21为正极,针刀体二22为负极。在行刀时,通过惯性传感器可采集针刀的加速度数据,并根据加速度数据判断针刀头是否到达特定的组织,当判断针刀抵达特定组织后,肌内压检测模块向针刀体一21和针刀体二22施加预定的微电压,并开启高速模数采集肌内压曲线。治疗前后由于肌肉组织密度变化,反应出的内值不同。肌内压检测模块采用的数据可通过上述针刀的数据输出模块出至后台服务器,由后台服务器对肌内压检测模块的采集数据进行分析处理。
[0062]
如图9所示,为一具体实施方式中,具有定位功能以及肌内压检测功能的针刀的电路模块图。该针刀具有电源模块、控制器、感应开关、定位模块、肌内压检测模块和数据发送模块。其中,电源模块用于给各其他模块供电,感应开关、肌内压检测模块、定位模块以及数据发送模块分别与控制器连接。控制器可采用单片机或具有相同数据处理能力的芯片,当感应开关检测到针刀被拿起时(即开始行刀时)控制器控制定位模块的惯性传感器高频采集针刀的加速度数据,并且通过肌内压检测模块采集微电流数据,并通过数据发送模块将所采集的数据发送至后台服务器,由后台服务器对所采集的数据进行分析和判断。
[0063]
在另一实施方式,提供了一种针刀定位方法。该针刀定位方法包括以下步骤:
[0064]
通过惯性传感器检测针刀在行刀过程的加速度数据;
[0065]
根据所述加速度数据判断针刀头的位置。
[0066]
其中,惯性传感器与针刀固定在一起,因此可采集到针刀在行刀过程中的加速度数据。由于针刀行刀过程遇到如皮肤,肌肉、韧带、筋膜、骨面不同组织部分的阻碍值不同,从而引起针刀刀头加速度值数据会发生变化,因此通过分析所述加速度数据,可解算出针刀刀头的位置。通过本实用新型可以辅助针刀治疗和协助新手医生快速掌握针刀技术,可以提高针刀治疗时行针的准确性,提高针刀诊断的准确性,为针刀治疗提供精准的数据支持。
[0067]
进一步的,所述“通过惯性传感器检测针刀在行刀过程的加速度数据”包括:在行刀过程实时监测(每秒1000次以上)惯性传感器采集的加速度数据;
[0068]
所述“根据所述加速度数据判断针刀头的位置”包括:并判断当前加速度值是否大于预设值,若是则判定针刀头已行进至下一组织,并输出提示信息。
[0069]
需要说明的是,尽管在本文中已经对上述各实施例进行了描述,但并非因此限制本实用新型的专利保护范围。因此,基于本实用新型的创新理念,对本文所述实施例进行的变更和修改,或利用本实用新型说明书及附图内容所作的等效结构或等效流程变换,直接或间接地将以上技术方案运用在其他相关的技术领域,均包括在本实用新型的专利保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1