一种基于航姿参考系统的三维头位测试装置
1.本实用新型是一种测量装置,具体来说是一种基于航姿参考系统(ahrs)的三维头位测试装置。
背景技术:
2.很多眼外肌疾病,如斜视及眼球震颤,患者为了消除复视,维持双眼单视功能,获得最佳视力,会造成代偿头位。除眼外肌疾病之外,尚包含骨或肌肉源性、神经源性、耳源性以及与眼外肌疾病无关的其他眼病,也可能出现异常头位。临床上对头位进行精确、可靠、方便的测量对于疾病诊断、治疗效果评估等都具有重要意义。
3.目前常用的头位测量方法有以下两种:
4.1、整形量角器或分归测量法:嘱患者注视远处视标,将分规一脚置于其头颅矢状轴方向,另一脚置于其躯干矢状轴方向,两角交叉即为头位的角度。这一方法测量精度低,且不适合配合度较差的低龄儿童;
5.2、投影法:是利用一个标有横纵坐标的屏幕和一个头戴式的投影装置来测量头位的方法。让患者头戴一个可以投射光源的投影装置,令其注视墙上的视标,通过投射光源在屏幕的坐标的相对位置来计算患者的代偿头位。这一方法虽然能保障测量精度,但对于测量环境有较高要求,而且计算方式复杂,无法直接导出头位数据。
技术实现要素:
6.针对上述问题,本实用新型的目的是提供一种基于航姿参考系统(ahrs)的三维头位测试装置,能够实时提供患者三维头位数据、跟踪曲线以及影像。测量精度小于1
°
,带宽20hz,使用方便,直观,重复性好,可广泛应用于不同类型的患者,包括不合作的低龄儿童。
7.本实用新型基于航姿参考系统的三维头位测试装置,包括传感头、控制器和平板电脑。
8.其中,传感头包括航姿参考系统与焦距可调的高清可调焦摄像头两者与控制器连接,控制器与平板电脑连接。传感头包括航姿参考系统与焦距可调的高清可调焦摄像头,两者与控制器连接,分别获取测试者三维头位测试数据及头位三维影像,经控制器控制发送至平板电脑,后经平板电脑进行处理,得到三维头位实时数据,并通过画图的方式形成三维头位跟踪曲线,输出至人机界面,由人机界面显示患者信号,三维头位实时数值,三维头位跟踪曲线,三维头位实时影像
9.本实用新型的优点在于:
10.1、本实用新型基于航姿参考系统的三维头位测试装置,可实时测试并输出 360
°
范围内头位的俯仰、翻滚和航向角度,测量精度小于1
°
,带宽20hz。
11.2、本实用新型基于航姿参考系统的三维头位测试装置,可实时测试并输出三维头位影像。
12.3、本实用新型基于航姿参考系统的三维头位测试装置,操作简单,重复性好。
附图说明
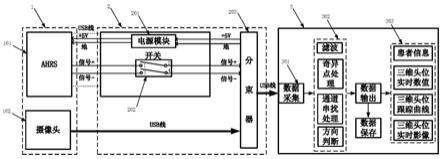
13.图1为本实用新型基于航姿参考系统的三维头位测试装置的结构框图。
14.图中:
[0015]1‑
传感头
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑
控制器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ3‑
平板电脑
[0016]
101
‑
航姿参考系统
ꢀꢀꢀꢀꢀꢀꢀꢀ
102
‑
高清可调焦摄像头
ꢀꢀꢀꢀ
201
‑
电源模块
[0017]
202
‑
开关
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
203
‑
分束器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
301
‑
数据采集模块
[0018]
302
‑
数据处理模块
ꢀꢀꢀꢀꢀꢀꢀꢀ
303
‑
人机界面
具体实施方式
[0019]
下面结合附图对本实用新型作进一步详细说明。
[0020]
本实用新型基于航姿参考系统的三维头位测试装置,包括传感头1、控制器 2和平板电脑3。
[0021]
所述传感头1刚性固定在头盔顶部,头盔带在测试者头部,使传感头1可随头部转动。传感头1包含一个德国xsens公司生产的mti系列航姿参考系统 (ahrs)101和一个具有焦距可调功能的高清可调焦摄像头102。航姿参考系统 101用于实时获取测试者三维头位测试数据,包括头位的俯仰角、航向角和翻滚角;高清可调焦摄像头102用于实时提供头位三维影像。传感头1中航姿参考系统101通过标准usb线与控制器2相连;高清可调焦摄像头102通过标准usb 线与控制器2中的分束器203相连。
[0022]
所述控制器2用于完成传感头1的+5v电源的供电、航姿参考系统101校准以及数据通讯,可以将三维头位测试数据和影像信息同时输出。
[0023]
上述控制器2包含电源模块201、开关202和分束器203。其中,分束器203 与平板电脑3的usb接口间通过标准usb线相连,实现控制器2与平板电脑3 间的连接及数据传输。电源模块201的输入端+5v和地与分束器203的usb端口的+5v和地相连;电源模块201的输出端+5v和地与航姿参考系统101中 +5v和地相连;由此平板电脑3usb接口中的+5v电压经过滤波、稳定后,输出给航姿参考系统101,从而为航姿参考系统101供电。
[0024]
开关202的端口1与航姿参考系统101的输出usb线中信号+连接;开关202 的端口3与航姿参考系统101的输出usb线中信号
‑
连接;开关202的端口2与分束器203的usb端口中信号+连接;开关202的端口4与分束器203的usb端口中信号
‑
连接。通过开关202选择是否连通航姿参考系统101的信号正、信号负与分束器203中usb端口1的信号正、信号负。
[0025]
当处于连通状态时,则航姿参考系统101的信号+、信号
‑
与分束器203中usb 接口的信号+、信号
‑
直接相连,使航姿参考系统101获取的数据直接传到平板电脑3中。
[0026]
所述平板电脑3为德国dell公司生产的latitude 10系列,具有数据采集模块301、数据处理模块302与人机界面303。其中,数据采集模块301与控制器2间的通过标准usb连接,用于采集测试者三维头位测试数据及头位三维影像;数据采集模块301与数据处理模块302相连,将采集到的数据发送到数据处理模块302。
[0027]
数据处理模块302包括滤波处理模块、奇异点处理模块、通道串扰处理模块、方向判断模块。其中,滤波处理模块用来对数据采集模块301采集到数据进行低通滤波,减小测量信号噪声;奇异点处理模块用来剔除数据采集模块301与数据处理模块302通信中可能出现的由于通信导致的异常数据;通道串扰处理模块用来消除摄像头的图像数据,航姿参考
系统101的测量数据传输通道通(即两根 usb线为两个传输通道)之间存在的串扰;方向判断模块用来根据头位三维影像与头位测试数据,记录和判别头位转动方向。通过以上数据处理,得到三维头位实时数据,并通过画图的方式形成三维头位跟踪曲线,并输出至人机界面303,由人机界面303显示患者信号,三维头位实时数值,三维头位跟踪曲线,三维头位实时影像,以便医生能够实时精确掌握患者头位;同时,输出三维头位实时影像,从而医生也可以在平板电脑屏幕上直观观察患者头位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1