一种防倾斜的轮椅的制作方法
[0001]
本实用新型涉及医疗器械技术领域,尤其涉及一种防倾斜的轮椅。
背景技术:
[0002]
轮椅上的移动架在使用时,在经过陡坡时,由于轮椅的四个轮子不能始终处在同一水平面上,因此轮椅承载人体的平面不易始终保持水平,而病人的坐着的重心失去平衡,极易发生轮椅侧翻(或者前倾、后倾翻到),存在安全隐患。
技术实现要素:
[0003]
本实用新型要解决的技术问题是:轮椅的移动架四个轮子在经过坡道时不在同一水平面上。
[0004]
本实用新型解决其技术问题所采用的技术方案是:一种防倾斜的轮椅,包括控制架、对称设置在所述控制架两侧的若干转轮组件以及连接所述转轮组件和控制架的高度调节组件,所述转轮组件包括安装至所述控制架上的自驱轮以及安装在所述自驱轮轴心位置的连接板,所述自驱轮至少有四个,所述高度调节组件包括连接至所述连接板和所述控制架之间的若干铰接杆以及高度调节气缸,所述铰接杆的两端分别铰接至所述连接板和所述控制架上,所述连接板、所述铰接杆以及所述控制架连接后构成易变形的多层长方形框架结构,所述高度调节气缸的两端均铰接至所述连接板和所述控制架上,所述高度调节气缸和所述铰接杆之间始终保持锐角角度,所述高度调节气缸启动后可控制多层所述长方形框架结构变形,所述连接板和所述自驱轮可平行于所述控制架的重心方向进行移动。
[0005]
进一步的,所述铰接杆连接至所述连接板的两侧位置,所述高度调节气缸连接至所述连接板的中间位置。
[0006]
进一步的,所述控制架包括悬挂架,所述铰接杆和所述高度调节气缸均铰接至所述悬挂架上。
[0007]
进一步的,所述转轮组件还包括若干辅助轮,所述辅助轮安装至所述自驱轮上,所述辅助轮的轮径小于所述自驱轮的轮径。
[0008]
进一步的,所述轮椅还包括人形折垫,所述辅助轮还安装至所述人形折垫的端部。
[0009]
进一步的,所述悬挂架还包括安装在所述控制架上的承载板,所述承载板上安装有电源,所述电源和所述自驱轮电性连接。
[0010]
进一步的,所述控制架还包括底座,所述底座安装在所述悬挂架上,所述底座上安装有水平传感器,所述水平传感器和所述自驱轮电性连接。
[0011]
本实用新型的有益效果是,在自驱轮的轴心位置设置连接板,并利用铰接杆活动连接控制架和连接板,形成极易变形的长方形框体结构,同时在长方形框体结构中活动连接高度调节气缸,活动调节通过活动调节气缸的调节,可促使长方形框体结构进行可控的变形,带动自驱轮平行状态的上下移动,针对路况调节各个自驱轮的高度,从而减少轮椅在通过崎岖不平的路况时的颠簸程度,减少轮椅发生侧翻的几率,避免对病人的人身安全造
成影响。
附图说明
[0012]
下面结合附图和实施例对本实用新型进一步说明。
[0013]
图1是本实用新型轮椅的立体图;
[0014]
图2是图1所示轮椅的另一立体图(省略人形折垫以及底座);
[0015]
图3是图1所示轮椅中升降组件以及部分部件的立体图;
[0016]
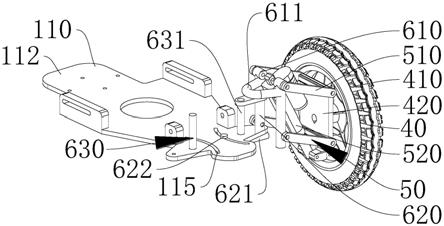
图4是图1所示转轮组件、高度调节组件以及角度调节组件的立体图;
[0017]
图5是图1所示轮椅在挪移病人的示意图;
[0018]
图中:轮椅-100、控制架-10、人形折垫-20、悬挂架-110、保护箱体-120、底座-130、转动板-131、转动架-132、转动气缸-133、升降组件-30、转轮组件
ꢀ-
40、高度调节组件-50、角度调节组件-60、架体-111、承载板-112、电源-113、升降杆-310、操控杆-320、抵持板-330、升降气缸-340、限程块-114、自驱轮
ꢀ-
410、连接板-420、辅助轮-430、铰接杆-510、高度调节气缸-520、转动支架
ꢀ-
610、自转杆-620、操控件-630、曲杆-611、操控轴-631、限位连杆-621、限位曲槽-115、限位杆-622。
具体实施方式
[0019]
下面详细描述本实用新型的实施例,所述实施例的示例在附图中示出,其中自始至终相同或类似的标号表示相同或类似的元件或具有相同或类似功能的元件。下面通过参考附图描述的实施例是示例性的,仅用于解释本实用新型,而不能理解为对本实用新型的限制。相反,本实用新型的实施例包括落入所附加权利要求书的精神和内涵范围内的所有变化、修改和等同物。
[0020]
如图1和图2所示,本实用新型提供了一种便于挪移病人的轮椅100,包括控制架10以及安装在控制架10上的人形折垫20,人形折垫20可进行与人体形态相应的调整,控制架10设置在人形折垫20的下方,通过控制架10的移动,可带动人形折垫20连同其上的人体进行移动。
[0021]
控制架10包括悬挂架110、固定安装在悬挂架110上的保护箱体120以及固定在保护箱体120上的底座130。人形折垫20可转动地安装在底座130上,底座130上朝向保护箱体120的侧面上安装有水平传感器(图未示),水平传感器用于监控底座130是否处于水平位置,底座130上背离人形折垫20的平面上还设置有控制终端(图未示),水平传感器可将检测数据传输至控制终端上,控制终端根据检测到的倾斜角度对底座130进行调整,避免人形折垫20倾斜后发生侧翻。保护箱体120垂直于底座130,底座130可拆卸地安装至保护箱体120 上。
[0022]
优选地,底座130包括转动板131以及转动架132,人形折垫20可转动地安装在转动板131上,且人形折垫20翻折后可由人体坐姿更换为平行于转动板 131的躺姿。转动架132固定安装在转动板131上背离人形折垫20的侧面上,转动架132的一端铰接至保护箱体110的顶部,转动架132上铰接有转动气缸 133,转动气缸133的缸体铰接至保护箱体110内,转动气缸133的活塞轴铰接至转动架132的中间位置,转动气缸133启动后,在活塞轴伸出或缩回时,均可驱使转动板131和人形折垫20相对保护箱体120产生转动,改变人形折垫20 相对
保护箱体120的角度,当轮椅100靠近床或者沙发时,可通过转动气缸133 的作用,实现人形折垫20的倾翻,从而使病人顺势滑落至沙发或者床上。
[0023]
轮椅100还包括设置在悬挂架110上的升降组件30、对称设置在悬挂架110 两侧的若干转轮组件40、连接转轮组件40和悬挂架110的高度调节组件50以及角度调节组件60。
[0024]
悬挂架110包括呈方型的网框结构的架体111以及固定铺设在架体111上的承载板112,保护箱体120固定安装在承载板112上。承载板112上还安装有电源113,电源优选为锂电池,电源113为轮椅提供移动的动力。架体111的四角延伸出承载板112的边缘。
[0025]
升降组件30包括构成剪式结构的若干升降杆310、铰接在升降杆310上的操控杆320、安装在所述剪式结构顶端的抵持板330以及铰接至操控杆320上的升降气缸340。
[0026]
如图3所示,升降杆310相互铰接后构成剪式结构,所述剪式结构的底端可滑动地安装在承载板112上,具体的,承载板112上固定安装有限程块114,限程块114上开有腰型槽(图未标),所述剪式结构的底端铰接在所述腰型槽内,抵持板330设置在保护箱体120内,抵持板330呈u型结构,所述剪式结构的顶端铰接至抵持板330的翼板上,且升降杆310的端部可相对抵持板330的翼板进行滑动,转动气缸133的缸体铰接至抵持板330上。操控杆320靠近承载板112设置,操控杆320处在所述剪式结构中升降杆310的中间位置,升降气缸340的缸体铰接至承载板112上,升降气缸340的活塞轴铰接至操控杆320 上。
[0027]
升降气缸340启动后,在升降气缸340的驱使下,操控杆320沿远离或靠近承载板112的方向移动,从而带动升降杆310构成的剪式结构产生变形,剪式结构两端的升降杆310可沿抵持板330的翼板以及限程块114进行让位移动,底座130在剪式结构的推抵下,可调节人形折垫20相对保护箱体120的高度。
[0028]
转轮组件40包括安装至架体111上的自驱轮410以及安装在自驱轮410轴心位置的连接板420,具体的,自驱轮410至少有四个,且自驱轮410中安装有电性连接至电源113上的电刷(图未示),电刷通电后可驱使自驱轮410产生相应的自转,从而带动轮椅100进行移动。本实施方式中的轮椅100采用四驱方式驱使转动,具体的驱动方式请参照电动车领域中普遍使用的驱动技术。优选地,转轮组件40还包括辅助轮430,辅助轮430至少有四个,其中两个辅助轮 430固定安装在人形折垫20上,两个辅助轮430沿远离人形折垫20的方向固定安装在自驱轮410上,辅助轮430的轮径小于自驱轮410的直径,辅助轮430 通过弯折杆连接至自驱轮410上,且辅助轮430的最低端经过弯折后处在自驱轮410最低端的上方,在经历坡度过大的路段时,辅助轮430接触地面后,可通过速度差的方式促使自驱轮410减速停止转动,从而可实现轮椅100的减速急停。
[0029]
如图4所示,高度调节组件50包括相对悬挂架110可活动的若干铰接杆510 以及高度调节气缸520,铰接杆510铰接至连接板420的两侧,可以理解的,自驱轮410通过铰接杆510连接至悬挂架110上。铰接杆510连接悬挂架110以及连接板420连接后共同构成易变形的多层长方形框架结构。优选地,连接板 420两侧的铰接杆510相对平行设置,且铰接杆510绕连接板420转动的方向一致。
[0030]
高度调节气缸520设置在连接板420的中间位置,高度调节气缸520的活塞轴铰接至连接板420上,且高度调节气缸520和铰接杆510之间始终保持锐角的角度,可以理解的,当高度调节气缸520启动时,通过活塞轴的推动或收回,可强制性的驱使铰接杆510构成的长方体框架结构变形,从而可实现自驱轮410始终以平行于架体111的状态进行移动。在其
他的实施方式中,高度调节组件50中可以仅用高度调节气缸520固定连接悬挂架110和连接板420,在高度调节气缸520的驱使下可调节自驱轮410相对悬挂架110的高度。
[0031]
角度调节组件60包括连接至铰接杆510上的转动支架610、固定安装在转动支架610上的自转杆620以及控制自转杆620转动的操控件630。
[0032]
转动支架610呈和连接板420平行对应的方形框架结构,铰接杆510铰接至转动支架610的侧边上,高度调节气缸520的缸体铰接至转动支架610的中间位置(转动支架610中用于穿插连接铰接杆510以及高度调节气缸520的转轴在附图中未示出),转动支架610中设置有曲杆611,曲杆611和承载板112 平行对应,曲杆611的两端靠近铰接杆510设置,自转杆620固定连接至曲杆 611上,自转杆620可相对转动地贯穿承载板112。操控件630可控制自转杆620 相对承载板112自转。
[0033]
可以理解的,在其中的一个实施方式中,操控件630包括操控轴631,操控轴631是驱动电机的转轴,驱动电机的机体安装在承载板112上,操控轴631 通过齿轮啮合的方式驱使自转杆620转动。在其他的一个实施方式中,操控件 630中的操控轴631也可以通齿轮齿条的方式驱使自转杆620转动,在其他的一个实施方式中,操控件630中的操控轴可通过皮带滑轮的方式驱使自转杆620 转动。综上,操控件630驱使自转杆620转动的结构方式在本实施方式中不作具体限制。自转杆620的转动可带动转动支架610转动,转动支架610通过铰接杆510以及连接板420可改变自驱轮410相对承载板112的角度,从而可调控轮椅100的转动角度。
[0034]
优选的,自转杆620上远离曲杆611的端部固定安装有限位连杆621,承载板112上开有限位曲槽115,限位曲槽115是呈弧形的腰型槽,限位曲槽115内可滑动的穿插有限位杆622,限位杆622固定连接至限位连杆621上,当自转杆 620转动时,通过限位曲槽115对限位杆622的行程限位,可限至自转杆620的转动角度,从而可通过转动支架610、铰接杆510以及连接板420控制自驱轮 410的转动角度,避免轮椅100转弯时角度过大,发生侧翻现象。
[0035]
高度调节气缸520、操控件630和水平传感器共同电性连接至控制终端上,水平传感器将底座130倾斜的角度传递到控制终端上,根据控制终端中收集的倾斜角度信息,当倾斜角度超过安全区间时,可调节各个自驱轮410对应的高度调节气缸520的伸出或缩回状态,更为具体的,控制终端内可对水平传感器传输的信号进行分析,判断底座130的倾斜方向,在倾斜方向上,重心较低的自驱轮410对应的高度调节气缸520启动伸出,自驱轮410向下运动,直至底座130的倾斜角度改变至合理的区间内,从而可防止轮椅100发生侧翻。
[0036]
而在坡道上调头或者转弯时,在高度调节气缸520启动的同时,可启动相应的操控件630,通过自转杆620可改变自驱轮410的转动角度,保证坡道上轮椅100的转向过程稳定进行。
[0037]
上述的轮椅100在使用时,用户坐在人形折垫20上,当用户需要从轮椅100 上挪移到床上去时,人形折垫20可根据用户需求改变成和躺姿对应的伸长状态,人形折垫20通过自驱轮410的移动,靠近至床体附近,启动升降组件30中的升降气缸340,改变升降杆310构成的剪式结构的形状,使得人形折垫20上升靠近至床体的边缘,之后启动转动气缸133,在转动气缸133的抵持作用下,承载人形折垫20的底座130发生倾翻,用户可滑落或滚落至床体上,即便于搬运用户至床体上。
[0038]
如图5所示的实施方式中,当人形折垫20在升降组件30的作用下,可调整至略高出
床体的状态,调整自驱轮410相对架体111的角度,造成在轮椅100 的倾斜,人形折垫20远离床的边缘高于靠近床的边缘,具体的,靠近床的高度调节气缸520启动收缩,远离床的高度调节气缸520启动伸出,通过制作高度差的方式实现人形折垫倾翻,便于用户挪移病人。
[0039]
上述的轮椅100在遇到崎岖不平的路况时,当底座130发生倾翻时,根据底座130的倾斜角度,启动相应的高度调节气缸520,高度调节气缸520启动后可改变铰接杆510连接架体111和连接板420的角度,从而改变自驱轮410的相对架体111的高度,进而可保证当自驱轮410接触地面时,底座130始终保持水平的状态,防止用户在使用轮椅100时发生侧翻。
[0040]
在上述的使用过程中,当轮椅100在路况较差的地方进行转向时,可通过操控件630调节自转杆620的自转角度,从而带动转动支架610转动,转动支架610转动时,通过铰接杆510以及连接板420带动自驱轮410改变方向,而在改变自驱轮410前进方向的同时,可重复执行上述的高度调节过程,可稳定地完成坡道转弯的过程,进一步的防止用户在使用轮椅100时发生侧翻。
[0041]
以上述依据本实用新型的理想实施例为启示,通过上述的说明内容,相关工作人员完全可以在不偏离本项实用新型技术思想的范围内,进行多样的变更以及修改。本项实用新型的技术性范围并不局限于说明书上的内容,必须要根据权利要求范围来确定其技术性范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1