可快速拆装的外骨骼康复机器人的制作方法
1.本实用新型涉及医疗辅助器械技术领域,更具体地涉及可快速拆装的外骨骼康复机器人。
背景技术:
2.外骨骼康复机器人是一种仿人体运动状态、可穿戴式的轻量机器人,它不仅能够帮助因先天或者疾病造成的肌肉损伤残疾人恢复行走能力,还有望避免患者因长时间坐在轮椅上而生压疮,同时还能改善心脏健康状况、锻炼肌肉强度、预防由长时间匮乏平衡性运动造成的小脑萎缩等。
3.然而,现有的外骨骼机器人在运输、使用、挪动过程中始终为一整体,体积较大且运输成本高昂,携带极其不便,而且售后维修必须拆卸整机,工作量和工作难度都比较大。
4.如申请号为cn202010148125.4的中国专利公开了一种模块化关节和可穿戴模块化关节外骨骼的发明专利,该发明采用模块化方案设计外骨骼,针对不同用户不同关节障碍的治疗,可以为患者的一个或多个关节配置关节驱动模块,提供了一种适用广泛、舒适性好、轻便的可穿戴模块化关节外骨骼,然而,相邻的两个模块化组件连接时,仍然适用传统的非快拆方案连接,在组装更换模组、维修、运输、搬运时,仍是非常繁琐费时费力。
5.又如申请号为cn201911215129.3的中国专利公开了一种可穿戴腰部助力外骨骼的发明专利,该发明外骨骼的腿部模块可实现快速电性组装连接以及快速拆卸分离,方便了外骨骼的使用,然而此种快拆结构仍然存在缺陷,首先该发明只是针对腰部助力外骨骼的局部快拆,并未涉及到整个下肢外骨骼的快拆;其次,本发明的快拆结构采用拉扭式锁止,用户体验差。
技术实现要素:
6.本实用新型的一个目的在于提供了一种可快速拆装的外骨骼康复机器人,其中,所述外骨骼康复机器人通过快拆和快装方案解决外骨骼机器人因体积较大,带来运输成本高昂,携带不便等问题。当整机需要运输、挪动、放置时,将其拆除成组件后,堆叠至特制的包装箱体内,提高空间利用率,也可降低运输成本。需要使用时,快速装配好整机,实现穿戴行走。同时使用模块化设计方案,如发生损坏需要维修时,仅需要拆卸损坏的模块组件,简化工作量和工作难度,另外,针对不同身高区间用户群体,可快速定制大腿组件和小腿组件(如高、中、低三档)用以快速替换,满足不同患者使用。
7.为了实现上述至少一目的,本实用新型提供了一种可快速拆装的外骨骼康复机器人,包括若干关节模块,所述关节模块包括依次连接的背部模块、大腿模块、膝关节模块、小腿模块和踝足模块;以及至少一快拆机构,所述快拆机构设置于两相邻所述关节模块之间,以将相邻的所述关节模块可拆卸地连接;所述快拆机构包括锁持组件,所述锁持组件包括第一按钮和第二按钮,所述第一按钮和所述第二按钮之间形成一夹持空间,以将相邻所述关节模块的一端夹持,通过按压所述第一按钮和所述第二按钮以调节所述夹持空间的大
小。
8.在其中一个实施例中,所述快拆机构还包括固接于一所述关节模块上的连接件,所述连接件上开设有一通槽,所述锁持组件安装于所述通槽内,且所述第一按钮和所述第二按钮的端部露出于所述通槽的两端口。
9.在其中一个实施例中,所述第一按钮包括第一操作部和第一夹持部,所述第二按钮包括第二操作部和第二夹持部,所述第一按钮和第二按钮相套接以使得所述第一夹持部和所述第二夹持部之间形成一夹持空间,所述第一操作部和所述第二操作部露出于所述通槽的两端口。
10.在其中一个实施例中,所述第一夹持部的外端固接有第一弹簧,所述第二夹持部的外端固接有第二弹簧;当所述第一按钮和所述第二按钮相套接时,所述第一夹持部处于所述第二操作部和所述第二夹持部之间,所述第一弹簧抵靠于所述第二操作部的内侧,所述第二夹持部处于所述第一操作部和所述第一夹持部之间,所述第二弹簧抵靠于所述第一操作部的内侧;当按压所述第一操作部和第二操作部时,所述第一夹持部和所述第二夹持部相互远离,以使所述夹持空间变大,松开时,所述夹持空间在所述第一弹簧和所述第二弹簧的作用下恢复到初始状态。
11.在其中一个实施例中,所述第一夹持部上设有向外延伸的第一限位筋,所述第二夹持部上设有向外延伸的第二限位筋,所述通槽内设有两限位槽,当所述第一按钮和所述第二按钮安装于所述通槽内时,所述第一限位筋和所述第二限位筋分别卡接于所述限位槽内。
12.在其中一个实施例中,所述快拆机构还包括设置于相邻所述关节模块上的卡接杆,所述卡接杆上开设有两锁槽,当所述卡接杆插入所述夹持空间时,所述第一夹持部和所述第二夹持部在所述第一弹簧和所述第二弹簧的作用下卡接于所述锁槽内,以将所述卡接杆牢固地锁持。
13.在其中一个实施例中,所述第一夹持部和所述第二夹持部在所述卡接杆的插入方向上开设有倒角,当所述卡接杆在插入所述夹持空间时,所述卡接杆顶住所述倒角将所述夹持空间顶开,以顺利插入所述夹持空间中。
14.在其中一个实施例中,所述快拆机构还包括连接器,所述连接器包括连接器公座和连接器母座,所述连接件上还开设有一卡槽,所述卡槽内设有一穿线孔,所述连接器公座设置于所述卡槽内,导线可通过所述穿线孔与所述连接器公座电连接,所述连接器母座设置于所述卡接杆的端部,当所述卡接杆卡接于所述连接件时,所述连接器母座与所述连接器公座相连导通,位于同一所述关节模块两端的所述卡接杆上的所述连接器母座通过内部导线相导通。
15.在其中一个实施例中,所述连接件上还设有盖板,所述盖板用于将所述卡槽和所述通槽的上侧封盖。
16.在其中一个实施例中,所述外骨骼康复机器人还包括供电模块,所述供电模块包括设置于所述背部模块上的电池仓和设置于所述电池仓内的电池组,所述电池组上设有母端子,所述电池仓内设有公端子,当所述电池组插入所述电池仓内时,所述公端子插入所述母端子中以实现导通放电。
17.通过对随后的描述和附图的理解,本实用新型进一步的目的和优势将得以充分体
现。
18.本实用新型的这些和其它目的、特点和优势,通过下述的详细说明,附图和权利要求得以充分体现。
附图说明
19.从下面结合附图对本实用新型实施例的详细描述中,本实用新型的这些和/或其它方面和优点将变得更加清楚并更容易理解,其中:
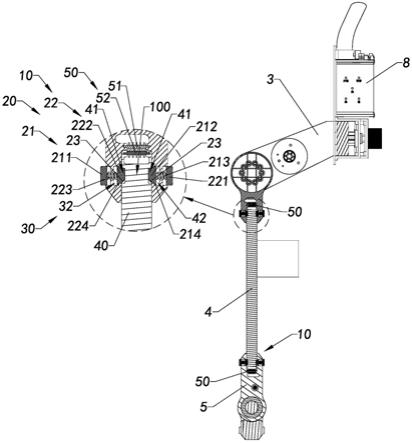
20.图1图示了根据本实用新型实施例的可快速拆装的外骨骼康复机器人的立体示意图。
21.图2图示了根据本实用新型实施例的可快速拆装的外骨骼康复机器人的爆炸示意图。
22.图3图示了根据本实用新型实施例的所述快拆组件的卡接方式示意图。
23.图4图示了根据本实用新型实施例的所述连接件的结构示意图。
24.图5图示了根据本实用新型实施例的所述锁持组件的爆炸示意图。
25.图6图示了根据本实用新型实施例的所述锁持组件的组合状态示意图。
26.图7图示了根据本实用新型实施例的所述锁持组件安装于所述连接件内的过程示意图。
27.图中:
[0028]1‑
外骨骼康复机器人;2
‑
关节模块;3
‑
背部模块;4
‑
大腿模块;5
‑
膝关节模块;6
‑
小腿模块;7
‑
踝足模块;10
‑
快拆机构;20
‑
锁持组件;21
‑
第一按钮;211
‑
第一操作部;212
‑
第一夹持部;213
‑
第一弹簧;214
‑
第一限位筋;22
‑
第二按钮;221
‑
第二操作部;222
‑
第二夹持部;223
‑
第二弹簧;224
‑
第二限位筋;23
‑
倒角;30
‑
连接件;31
‑
通槽;32
‑
限位槽;33
‑
卡槽;34
‑
穿线孔;40
‑
卡接杆;41
‑
锁槽;50
‑
连接器,51
‑
连接器公座;52
‑
连接器母座;60
‑
盖板;8
‑
电池模块;81
‑
电池仓;82
‑
电池组;811
‑
公端子;821
‑
母端子;100
‑
夹持空间。
具体实施方式
[0029]
以下说明书和权利要求中使用的术语和词不限于字面的含义,而是仅由本技术人使用以使得能够清楚和一致地理解本实用新型。因此,对本领域技术人员很明显仅为了说明的目的而不是为了如所附权利要求和它们的等效物所定义的限制本实用新型的目的而提供本实用新型的各种实施例的以下描述。
[0030]
可以理解的是,术语“一”应理解为“至少一”或“一个或多个”,即在一个实施例中,一个元件的数量可以为一个,而在另外的实施例中,该元件的数量可以为多个,术语“一”不能理解为对数量的限制。
[0031]
虽然比如“第一”、“第二”等的序数将用于描述各种组件,但是在这里不限制那些组件。该术语仅用于区分一个组件与另一组件。例如,第一组件可以被称为第二组件,且同样地,第二组件也可以被称为第一组件,而不脱离实用新型构思的教导。在此使用的术语“和/或”包括一个或多个关联的列出的项目的任何和全部组合。
[0032]
在这里使用的术语仅用于描述各种实施例的目的且不意在限制。如在此使用的,单数形式意在也包括复数形式,除非上下文清楚地指示例外。另外将理解术语“包括”和/或
“
具有”当在该说明书中使用时指定所述的特征、数目、步骤、操作、组件、元件或其组合的存在,而不排除一个或多个其它特征、数目、步骤、操作、组件、元件或其组的存在或者附加。
[0033]
如图1和图2所示,根据本实用新型实施例的可快速拆装的外骨骼康复机器人的结构被阐明。其中,所述外骨骼康复机器人1包括若干关节模块2和将所述关节模块2依次可拆卸地连接的快拆机构10,所述关节模块2包括但不限于背部模块3、大腿模块4、膝关节模块5、小腿模块6和踝足模块7,通过此种关节模块化的设置,使得所述外骨骼康复机器人1的适用范围更加广泛、用户体验更佳,同时使得模块的更换、维修和运输更加地便捷,另外,针对不同身高区间用户群体,可快速定制所述大腿模块4和所述小腿模块6(如高、中、低三档)用以快速替换,满足不同患者使用。
[0034]
具体地,如图4至图7所示,所述快拆机构10包括设置于两相邻所述关节模块2之间,其包括固接于一所述关节模块2上的连接件30、设置于所述连接件30内的锁持组件20以及设置于相邻所述关节模块2上的卡接杆40。其中,所述锁持组件20包括第一按钮21和第二按钮22,所述第一按钮21包括第一操作部211和第一夹持部212,所述第二按钮22包括第二操作部221和第二夹持部222,所述第一夹持部212的外端固设有第一弹簧213,所述第二夹持部222的外端固设有第二弹簧223,当所述第一按钮21和所述第二按钮22相套接以组成所述锁持组件20时,所述第一夹持部212处于所述第二操作部221和所述第二夹持部222之间,所述第一弹簧213抵靠于所述第二操作部221的内侧,所述第二夹持部222处于所述第一操作部211和所述第一夹持部212之间,所述第二弹簧223抵靠于所述第一操作部211的内侧,同时所述第一夹持部212和所述第二夹持部222之间形成一夹持空间100。当按压所述第一按钮21和所述第二按钮22,所述第一夹持部212和所述第二夹持部222相互远离,以调节所述夹持空间100的大小,松开时,由于弹簧弹力的作用,所述夹持空间100又恢复到初始状态。通过弹簧确保所述第一按钮21和所述第二按钮22的初始位置以及按压撤销外力后的复位功能。
[0035]
更具体地,所述连接件30上开设有一通槽31,所述锁持组件20安装于所述通槽31内,且所述第一操作部211和所述第二操作部221露出于所述通槽31的两端,以方便用户操作。其中,所述第一夹持部212和第二夹持部222上分别设有向外延伸的第一限位筋214和第二限位筋224,相应地,所述通槽31内设有两限位槽32,当所述锁持组件20安装于所述通槽31内时,所述第一限位筋214和所述第二限位筋224插入所述限位槽32内,通过这样的方式,以使所述第一按钮21和所述第二按钮22在开关行程方向上限位和止脱。
[0036]
如图3所示,所述卡接杆40内开设有两锁槽41,当所述卡接杆40插入所述夹持空间100内时,所述第一夹持部212和所述第二夹持部222在所述第一弹簧213和所述第二弹簧223的作用下卡接于所述锁槽41内,以将所述卡接杆40牢固地锁持,当按压所述第一操作部211和所述第二操作部221时,所述第一夹持部212和所述第二夹持部222从所述锁槽41内脱出,从而使得所述卡接杆40能从所述锁持组件20内拆除。
[0037]
优选地,所述第一夹持部212和所述第二夹持部222在所述卡接杆40的插入方向上开设有倒角23,当所述卡接杆40在插入所述夹持空间100时,所述卡接杆40顶住所述倒角23将所述夹持空间100顶开,从而顺利插入所述夹持空间100中,通过这样的方式,无需再按压所述第一操作部211和所述第二操作部221就能完成所述关节模块2之间的组装,提高了组装效率。在本技术实施例中,所述连接件30固接于所述背部组件3上、所述踝足组件7上以及
所述膝关节组件5的两端,所述卡接杆40设置于所述大腿组件4和所述小腿组件6的两端,通过两两卡接锁持完成组装,应理解的,所述连接件30和所述卡接杆40的分布方式仅为示例,并不作为本实用新型的限制。
[0038]
进一步地,所述快拆机构10还包括连接器50,所述连接器50包括连接器公座51和连接器母座52,所述连接件30上还开设有一卡槽33,所述卡槽33内设有一穿线孔34,所述连接器公座51设置于所述卡槽33内,供电线和信号线可通过所述穿线孔34与所述连接器公座51电连接,所述连接器母座52卡接于所述卡接杆40端部的卡槽内并将其用遮板限位遮丑,当所述卡接杆40卡接于所述连接件30时,所述连接器母座52与所述连接器公座51相连导通,位于所述大腿模块4两端的所述卡接杆40上的所述连接器母座52通过内部导线相导通。优选地,所述连接器50为pogo
‑
pin连接器,pogo
‑
pin公座与pogo
‑
pin母座接触时探针挤压变形以实现电信号的导通;所述在本技术实施例中,所述连接器50设置于所述背部模块3和所述大腿模块4之间,以及所述大腿模块4和所述膝关节模块5之间,通过所述卡接杆40的插入和拆除以完成所述关节模块2之间信号的导通和断开。
[0039]
进一步地,如图7所示,所述连接件30上还设有盖板60,以将所述卡槽33和所述通槽31的上侧封盖,以实现限位和遮丑的作用。
[0040]
更进一步地,所述外骨骼康复机器人1还包括供电模块8,所述供电模块8包括设置于所述背部模块3上的电池仓81和设置于所述电池仓81内的电池组82,所述电池组82上设有母端子821,所述电池仓81内设有公端子811,当所述电池组82插入所述电池仓81内时,所述公端子811插入所述母端子821中以实现导通放电,通过导线和所述连接器50为所述关节模块2供电。优选地,所述电池仓81外还套有外壳(图中未示出),所述外壳在电池仓口设有翻盖,通过翻盖的开合以供所述电池组82出入,同时也可用于所述电池组82的限位。
[0041]
以上结合具体实施例描述了本实用新型的基本原理,但是,需要指出的是,在本实用新型中提及的优点、优势、效果等仅是示例而非限制,不能认为这些优点、优势、效果等是本实用新型的各个实施例必须具备的。另外,上述公开的具体细节仅是为了示例的作用和便于理解的作用,而非限制,上述细节并不限制本实用新型为必须采用上述具体的细节来实现。
[0042]
提供所公开的方面的以上描述以使本领域的任何技术人员能够做出或者使用本实用新型。对这些方面的各种修改对于本领域技术人员而言是非常显而易见的,并且在此定义的一般原理可以应用于其他方面而不脱离本实用新型的范围。因此,本实用新型不意图被限制到在此示出的方面,而是按照与在此公开的原理和新颖的特征一致的最宽范围。
[0043]
为了例示和描述的目的已经给出了以上描述。此外,此描述不意图将本实用新型的实施例限制到在此公开的形式。尽管以上已经讨论了多个示例方面和实施例,但是本领域技术人员将认识到其某些变型、修改、改变、添加和子组合。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1