一种严重骨折或高位截瘫患者使用的智能轮椅的制作方法
1.本实用新型涉及轮椅技术领域,具体地说是一种严重骨折或高位截瘫患者使用的智能轮椅。
背景技术:
2.据统计,在所有外科病症患者中,骨折患者的占比超过50%,由于骨折的修养恢复期很长,而且患者的活动能力大大受限,因此坐轮椅便成为他们出行的少有选择之一,医生通常根据不同病情采取不同的固定方式,导致一些被打上石膏或装着固定架的患肢无法弯曲在轮椅框架内,长长伸出的患肢很容易受到周边物体擦碰或他人误伤,导致目前大部分的轮椅无法对患者的受伤下肢提供全方位的保护,病人坐在轮椅上支着腿也极为不舒适,遇到不平的路面或是复杂路况由于重心不稳,还有从轮椅上摔落的风险。另外,脊柱骨折导致的高位截瘫是最为严重的骨折病情,高位截瘫是由脊髓神经受损而引发的四肢瘫痪,导致患者全部身体无法移动,无法用手来操控轮椅,普通轮椅也缺少其他更加智能的操控方式,给高位截瘫的患者使用。
3.因此,设计一种严重骨折或高位截瘫患者使用的智能轮椅,能够全方位保护患者下肢,腿部摆放舒适,并且具有多种操控方式,为严重骨折或高位截瘫患者使用轮椅提供便利。
技术实现要素:
4.本实用新型为克服现有技术的不足,提供一种严重骨折或高位截瘫患者使用的智能轮椅,能够全方位保护患者下肢,腿部摆放舒适,并且具有多种操控方式,为严重骨折或高位截瘫患者使用轮椅提供便利。
5.为实现上述目的,设计一种严重骨折或高位截瘫患者使用的智能轮椅,包括轮椅本体、支撑架、头戴装置,其特征在于:所述的支撑架的上方连接轮椅本体,轮椅本体一侧设有智能操控器,位于支撑架下端前侧通过连接杆连接前轮,支撑架下端后侧连接后轮,所述的连接杆连接可伸缩斜撑的一端,可伸缩斜撑的另一端连接护腿装置的一端,护腿装置的另一端连接支撑架。
6.所述的头戴装置包括弹性头带、倒u型头带、陀螺仪、电路模块,所述的弹性头带顶部一端连接倒u型头带的一端,倒u型头带的另一端连接电路模块的一端,电路模块的另一端固定在弹性头带内侧。
7.所述的陀螺仪为六轴陀螺仪,陀螺仪的型号为mpu6050。
8.所述的智能操控器包括支撑板、操控器外壳、万向控制杆、雷达报警器、按钮、控制器,所述的轮椅本体一侧连接支撑板一端,支撑板另一端设有操控器外壳,操控器外壳顶端一侧设有万向控制杆、操控器外壳顶端另一侧分别设有雷达报警器、按钮,位于操控器外壳内设有控制器。
9.所述的控制器可以选用arm单片机。
10.所述的护腿装置包括腿部支撑杆、脚踏板、护腿板、护腿垫、加长杆,所述的支撑架前端的左右两侧分别连接腿部支撑杆一端,腿部支撑杆的另一端连接加长杆的一端,加长杆的另一端连接脚踏板,位于腿部支撑杆的中部连接护腿垫的一端,护腿垫的另一端连接护腿板的一端,护腿板的另一端通过卡扣连接腿部支撑杆。
11.所述的腿部支撑杆与加长杆之间通过螺栓固定,腿部支撑杆与支撑架转动连接。
12.所述的可伸缩斜撑包括壳体、套筒,螺杆、转动扳手、水平锥齿轮、竖直锥齿轮,所述的连接杆连接壳体外侧一端,壳体外侧另一端连接转动扳手一端,转动扳手另一端位于壳体内并连接竖直锥齿轮一端,竖直锥齿轮另一端啮合水平锥齿轮,水平锥齿轮顶端连接套筒一端,位于套筒内螺纹连接螺杆一端,螺杆另一端穿过壳体并连接腿部支撑杆。
13.所述的壳体与连接杆之间通过法兰连接,壳体与腿部支撑杆之间通过铰链连接。
14.所述的支撑架一侧设有雷达探头,位于后轮处设有自动刹车装置。
15.本实用新型同现有技术相比,能够全方位保护患者下肢,腿部摆放舒适,并且具有多种操控方式,为严重骨折或高位截瘫患者使用轮椅提供便利。
附图说明
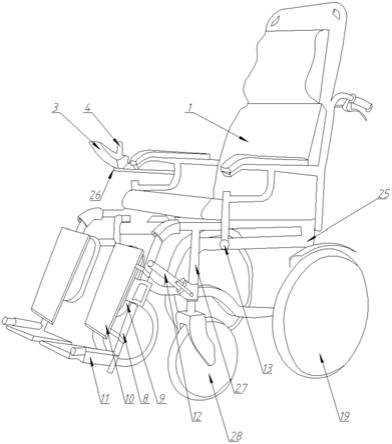
16.图1为本实用新型的结构示意图。
17.图2为本实用新型头戴装置的结构示意图。
18.图3为本实用新型智能操控器的结构示意图。
19.图4为本实用新型可伸缩斜撑的结构示意图。
20.图5为本实用新型加长杆的结构示意图。
21.参见图1至图5,其中,1是轮椅主体,3是智能操控器,4是万向控制杆,5是雷达报警器,6是按钮,7是控制器,8是腿部支撑杆,9是护腿垫,10是护腿板,11是脚踏板,12是可伸缩斜撑,13是雷达探头,14是螺杆,15是套筒,16是水平锥齿轮,17是转动扳手,18是竖直锥齿轮,19是驱动后轮,20是弹性头带,21是陀螺仪,22是电路模块,23是加长杆,24是倒u型头带,25是支撑架,26是支撑板,27是连接杆,28是前轮,29是壳体,30是操控器外壳。
具体实施方式
22.下面根据附图对本实用新型做进一步的说明。
23.如图1至图5所示,支撑架25的上方连接轮椅本体1,轮椅本体1一侧设有智能操控器3,位于支撑架25下端前侧通过连接杆27连接前轮28,支撑架25下端后侧连接后轮19,所述的连接杆27连接可伸缩斜撑12的一端,可伸缩斜撑12的另一端连接护腿装置的一端,护腿装置的另一端连接支撑架25。
24.如图2所示,头戴装置包括弹性头带20、倒u型头带24、陀螺仪21、电路模块22,所述的弹性头带20顶部一端连接倒u型头带24的一端,倒u型头带24的另一端连接电路模块22的一端,电路模块22的另一端固定在弹性头带20内侧。通过陀螺仪21将人的头部动作转化为相应的电信号,经电路模块22传输给控制器7,进而驱动轮椅。
25.陀螺仪21为六轴陀螺仪,陀螺仪21的型号为mpu6050。
26.如图3所示,智能操控器3包括支撑板26、操控器外壳30、万向控制杆4、雷达报警器5、按钮6、控制器7,所述的轮椅本体1一侧连接支撑板26一端,支撑板26另一端设有操控器
外壳30,操控器外壳30顶端一侧设有万向控制杆4、操控器外壳30顶端另一侧分别设有雷达报警器5、按钮6,位于操控器外壳30内设有控制器7。
27.控制器7可以选用arm单片机。
28.如图1所示,护腿装置包括腿部支撑杆8、脚踏板11、护腿板10、护腿垫9、加长杆23,所述的支撑架25前端的左右两侧分别转动连接腿部支撑杆8一端,腿部支撑杆8的另一端连接加长杆23的一端,加长杆23的另一端连接脚踏板11,位于腿部支撑杆8的中部连接护腿垫9的一端,护腿垫9的另一端连接护腿板10的一端,护腿板10的另一端通过卡扣连接腿部支撑杆8。
29.如图5所示,腿部支撑杆8与加长杆23之间通过螺栓固定,松开螺栓可以调节加长杆23,使脚踏板11伸长到合适的长度,然后固定,给病人提供舒适的脚部支撑。护腿板10为铝合金材料,且与腿部支撑杆8通过卡扣固定,整体质量轻盈,防止受伤的腿部受到擦碰或误伤。
30.如图4所示,可伸缩斜撑12包括壳体29、套筒15,螺杆14、转动扳手17、水平锥齿轮16、竖直锥齿轮18,所述的连接杆27通过法兰连接壳体29外侧一端,壳体29外侧另一端连接转动扳手17一端,转动扳手17另一端位于壳体29内并连接竖直锥齿轮18一端,竖直锥齿轮18另一端啮合水平锥齿轮16,水平锥齿轮16顶端连接套筒15一端,位于套筒15内螺纹连接螺杆14一端,螺杆14另一端穿过壳体29并通过铰链连接腿部支撑杆8。手动转动转动扳手17,带动竖直锥齿轮18转动,从而带动水平锥齿轮16及套筒15转动,再通过螺纹传动,转化为螺杆14沿轴线的直线运动。螺杆14的顶端与腿部支撑杆8通过铰链连接,通过螺杆14线性调节腿部支撑杆8与支撑架25的角度,使人的腿部达到适宜的曲张角度。
31.支撑架25一侧设有雷达探头13,位于后轮19处设有自动刹车装置。通过控制器7控制后轮19,使轮椅前进、停止、后退和转向。控制器7在接收到雷达探头13的报警信号后,自动刹车装置开始制动,保护轮椅上的患者。其中,自动刹车装置是现有的采购件。
32.具体使用时,搀扶患者坐到轮椅本体1上,将头戴装置带至患者头部,根据骨折固定的情况,首先松开加长杆23与腿部支撑杆8的固定螺栓,放开脚踏板11,手动转动转动扳手17,缓慢调整腿部支撑杆8的支撑角度,使患肢舒适的放置在护腿垫9上,并将脚踏板11推到合适的位置时,拧紧螺栓固定加长杆23与腿部支撑杆8。然后通过卡扣固定安装护腿板10,将患肢遮盖保护起来,以免受到碰伤。通过智能操控器3的按钮6可在万向控制杆4和头戴装置两种操控模式之间切换,通过推动万向控制杆4或者晃动倒u型头带24上的陀螺仪2即可控制轮椅,在行进的过程中,雷达探头13可以实时将轮椅周围物体的距离信息传递给控制器7,当距离过近,超过设定的危险距离值时,控制器7控制雷达报警器5报警,并启动自动刹车装置,制动后轮19,远离危险后再启动轮椅。
33.本实用新型通过头戴装置控制轮椅的移动,无需手动操控手柄,为严重骨折和高位截肢的患者控制轮椅提供便捷。通过护腿板10和脚踏板11的配合使用,在受伤的腿部周围形成保护罩,提供全方位的保护,防止受伤的腿部受到擦碰或踩踏,通过可伸缩斜撑12手动调节腿部支撑杆8的角度,使患者的腿部在打完石膏或拆除石膏但无法弯曲的情况下,与轮椅保持一个适合自然平放的角度,保持舒适的姿势出行。通过雷达探头13,主动检测近处的障碍,遇到危险情况时通过雷达报警器5报警,并自动刹车,规避风险。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1