一种带折叠坐凳的跟随吊架的制作方法
1.本实用新型涉及机械领域,特别涉及位移机或跟随吊架。
背景技术:
2.外骨骼机器人作为下肢残弱者进行康复或行走的机器人,使用者自重和外骨骼机器人重量总体负担较重,行走时会对使用者造成较重负担,此时需要支架对使用者和外骨骼机器人进行提升后实现减重效果,对使用者负担减轻,并且对行走状态、使用者心率、肌肉负担或痉挛现象都有较大改善。
3.另外,使用者在穿戴外骨骼机器人后仍需要康复治疗师或其他服务者跟随其进行保护,以免在使用者无力行走或出现其他意外情况时摔倒或出现其他紧急情况。而且,一旦康复训练时间较长,康复治疗师或其他服务者造成负担较重,且在此期间无法从事其他事项。
4.此外,作为跟随吊架,其跟随的对象不仅仅是外骨骼机器人,也可以是其他不穿戴辅助用具的康复人员。
5.在上述情况中,一旦使用者无力行走或需要休息时,现有技术中,没有出现设置专门配备坐凳的跟随吊架或者位移机。
6.同时,现有技术中也有类似的吊架,如中国实用新型专利cn101791255b,专利名称为:助行外骨骼机器人系统及控制方法中,该专利公开了设置有“活动平板、整体支架、升降重心调节系统、外骨骼机械腿和控制系统组成”的一种立式下肢康复训练机器人,该机器人公开的机械腿髋关节调节装置包括宽度调节齿条、宽度调节转轴、宽度调节齿轮及宽度调节导轨、宽度调节滑块和宽度调节手柄,一方面该宽度调节装置为手动调节,操作不简便,另一方面该宽度调节装置只实现了宽度上的调节,并未实现使用者在行走过程中纵向的起伏调节,因为按照一般的步态而言,人在行走中两侧髋关节是有波形的起伏,没有纵向调节,行走的步态会比较奇怪,且不是正常的行走步态。
7.再者,该系统装置设置了活动平板,只提供了使用者在该平板上的行走空间,枯燥且乏味,对于下肢残弱者而言,心情和心理因素至关重要,直接影响使用者的康复心态,在一个狭小空间内的走动并不能带给使用者真实的行走状态和观赏范围,无法真实符合正常的行走习惯,对康复会造成一定影响。
8.此外,如中国专利cn202459981u,专利名称为:下肢步态训练减重支撑装置,该专利提供了类似的外骨骼机器人的跟随吊架,该专利公开了底部支撑架、电动升降柱、立柱、带弯立柱、吊臂、扶手机构和下肢外骨骼连接机构,但是该专利的扶手弯管实现了可旋转的宽度调节,但该扶手弯管旋转后势必会对外骨骼机器人的位置产生前后的影响,此外,无法做到同步的宽度调节,当某一侧调节过多时,会出现侧倾现象。并且,支撑装置也未提供有纵向的外骨骼机器人调节范围,影响正常的行走步态。
技术实现要素:
9.本实用新型所要解决的技术问题是提供一种带折叠坐凳的跟随吊架,该跟随吊架设置有供休憩的坐凳,且该坐凳无需手动操控,自动跟随展平和折叠,使用便捷、安全性高。
10.为此,本实用新型采用以下技术方案:
11.它包括底盘、设置在底盘上的立柱以及设置在立柱上的用于连接跟随对象的环形力臂,其中,所述环形力臂连接设置有与立柱固定连接的能自动调节髋部宽度的同步调节装置;
12.所述跟随对象可以是下肢残弱、脑卒中患者、年老下肢失能者等,令跟随对象与本实用新型所述的跟随吊架固定后即可实现跟随。所述固定方式可以是将其腰部或髋部进行绑缚的设备,如腰带等。
13.具体的,所述底盘包括横向的承重梁及与承重梁两端垂直连接的框架梁,所述承重梁上设置有立柱,所述框架梁下方设置有脚轮组,脚轮组保证跟随吊架的顺畅行进;
14.在本公开中,所述环形力臂包括左力臂和右力臂,左力臂和右力臂都为l型折弯臂,所述同步调节装置连接所述左力臂和右力臂并能同步调节左力臂和右力臂之间的开合宽度。使用者在穿戴外骨骼机器人后,可以根据使用者的胯宽对左力臂和右力臂进行调节。
15.特别的,所述立柱包括与承重梁固定连接的内立柱和可在内立柱上实现上下移动的外立柱,所述吊架配设有随外立柱上升而收拢并随外立柱下降而折叠的折叠坐凳。
16.进一步的,所述折叠坐凳包括折叠部分和固定部分;
17.折叠坐凳的固定部分:
18.所述固定部分包括设置在两侧框架梁上的外倾的固定架、设置在固定架上的旋转板安装板及固定在外立柱上的调节滑轨,所述固定架包括两侧设置在框架梁上的侧臂及两侧壁之间横向连接的横臂,所述旋转板安装板固定在横臂上;
19.同时,所述旋转板安装板上部或顶端突出于所述固定架且处于固定架内侧,为折叠坐凳的向下折叠留出更多的空间,所述旋转板安装板焊接或螺栓固定在所述横臂上;
20.折叠坐凳的折叠部分:
21.所述折叠部分包括与固定架上部铰接的旋转板、与旋转板下部铰接的调节管、与调节管外端部铰接的调节管安装板及与调节管安装板连接的在调节滑轨上进行上下滑动的调节滑块;
22.所述旋转板外端设置有伸出架,所述伸出架与所述旋转板形成一定夹角角度,所述伸出架与旋转板的夹角可以根据外立柱的上升下降距离,以及调节管的长度来设置,已达到外立柱上升到使用者使用外骨骼机器人训练时的高度时坐凳完全折叠或折叠到不会影响使用者的脚步,及外立柱下降到使用者可以坐下的合适高度时坐凳完全展平。
23.可以理解到的是,所述旋转板外端可以直接设置凳面,或者在旋转板外端设置伸出架用以连接凳面,又或者,旋转板万端甚至伸出架,所述伸出架再固定连接一坐凳支架,坐凳与该坐凳支架连接。
24.更进一步的,所述固定架垂直于框架梁或向框架梁外倾斜。优选的,为了保证旋转板的旋转顺畅,避免调节管在随调节滑块上下运动时因调节管相对于旋转板以及旋转板相对于固定支架在纵方向上产生过多的互相抵触的作用力而无法顺畅旋转,所述固定架采用倾斜设置。当然,采用垂直的设置也可以实现本实用新型技术方案的目的。
25.更进一步的,所述调节管包括与旋转板下部铰接的调节外管和在调节外管内移动的与调节管安装板铰接的调节内管,用多节式的调节管来增加调节管的长度,一方面避免因调节管长度不够使得固定架安装在更靠近立柱位置,从而增加折叠时纵方向上产生过多的互相抵触的作用力。
26.更为具体的,所述调节外管的管壁上设置有从底部到顶部的长条形的调节内管滑动槽,所述调节内管底端固定有能在该滑动槽内移动的滑键,实现了调节内管和外管之间的滑动位移。
27.更进一步的,所述调节内管与调节外管之间设置有拉簧,用以抑制调节管的伸缩,在外立柱向上运动时,调节管还未达到最长程度时,调节管就可以将旋转板向上翻转,进而调节凳面折叠,当坐凳达到平展时,调节管可以继续随外立柱上升。
28.具体的,所述拉簧的一端连接在内管的顶部,另一端连接在外管的底部,使其达到调节内管上升时同时拉动外管的作用。
29.可以理解到的是,当坐凳处于折叠状态时,调节滑块处于调节滑轨的最上端,当外立柱上升时,调节滑轨随着外立柱上升,调节滑块先从最上端滑到最下端才会全力开始拉动调节内管伸出。同理,当坐凳刚处于展平状态时,调节滑块处于调节滑轨的最下端,当外立柱下降时,调节滑轨随着外立柱下降,调节滑块先从最下端滑到最上端才会全力开始推动调节内管缩回。
30.本公开中,所述吊架还配设有固定在外立柱上的同步调节装置,所述同步调节装置连接所述左力臂和右力臂并能同步调节左力臂和右力臂之间的开合宽度。
31.所述同步调节装置有以下两种实施方式:
32.1、同步调节装置包括:
33.所述左力臂和右力臂都为l型折弯臂,与所述左力臂内端部连接的第一滑板和与所述右力臂内端部连接的第二滑板,所述第一滑板和第二滑板平行,所述第一滑板和第二滑板用于固定左力臂和右力臂,两者通过螺栓或者焊接等方式实现固定连接;及
34.位于第一滑板和第二滑板的上方或下方的一个或两个滑轨,所述第一滑板和第二滑板与滑轨之间都设置有与其固定的滑块,所述滑轨固定在与立柱固定的固定板上,所述固定板与立柱固定连接,在一些实施例中,该滑轨可以同时在第一滑板和第二滑板的上方或者第一滑板和第二滑板的下方,也可以为一个或两个,当为两个时,力臂的负载能力会更好,相应的,所述滑块也处于第一滑板和第二滑板的上方或者第一滑板和第二滑板的下方,当为一个滑轨时,第一滑板和第二滑板下都设置一个滑块,滑块数为二个,当为二个滑轨时,相应的滑块数为四个,第一滑板与对应的滑块固定,第二滑板与对应的滑块固定,同样的,所述固定板也相应的处于第一滑板和第二滑板的上方或者第一滑板和第二滑板的下方,同时固定板与立柱固定连接,以上的固定连接方式可以是螺栓固定也可以是焊接固定;及
35.位于第一滑板上方或下方的第一齿条及与第一齿条相对的位于第二滑板下方或上方的第二齿条,所述第一齿条与第二齿条在内端与同一齿轮啮合,所述齿轮通过齿轮轴与立柱固定,实现任一力臂的移动都可以同时带动另一力臂的同步反向移动。
36.2、同步调节装置包括:
37.所述左力臂和右力臂都为l型折弯臂,与所述左力臂内端部连接的第一滑板和与
所述右力臂内端部连接的第二滑板,所述第一滑板和第二滑板平行;及
38.位于第一滑板和第二滑板下方的、靠近左力臂与右力臂的第一滑轨及位于第一滑板和第二滑板上方的、靠近立柱的第二滑轨;及
39.位于第一滑轨下方用于固定第一滑轨的第一固定板及位于第二滑轨上方用于固定第二滑轨的第二固定板,所述第一固定板和第二固定板都与立柱固定连接;及
40.固定在第一滑板和第二滑板下方的、与第一滑轨配合滑动的第一滑块组及固定在第一滑板和第二滑板上方的、与第二滑轨配合滑动的第二滑块组;及
41.位于第一滑板上方或下方的第一齿条及与第一齿条相对的位于第二滑板下方或上方的第二齿条,所述第一齿条与第二齿条在内端与同一齿轮啮合,所述齿轮通过齿轮轴与立柱固定,实现任一力臂的移动都可以同时带动另一力臂的同步反向移动。
42.以上设置为上下配合的滑轨和滑块组合,且靠近力臂的滑轨在下,靠近立柱的滑轨在上,其相应的滑块和固定板也是如此设置。
43.在这种情况下,根据力臂的作用力在经过靠近力臂的滑块和滑轨组合后,将作用于第一滑板和第二滑板的尾端形成向上的作用力,此时,靠近立柱的第二固定板、滑块和滑轨组合将大幅抵消此作用力,形成更为稳固的支撑作用,大幅提高力臂的负载能力,实现更好的、更大范围的跟随吊架减重支撑作用,提供更稳定的康复训练条件。
44.更进一步的,所述立柱上固定有同步调节装置安装板,所述同步调节装置安装板上固定有第三固定板,所述第三固定板下端与第一固定板固定,上端与第二固定板固定;三块固定板之间互相固定,且三块固定板都与立柱固定,提供更稳固的固定效果,使用稳定性更强。
45.以上第2中同步调节装置为优选。
46.更进一步的,所述齿轮轴后端部设置有轴承,所述第三固定板中部位置设置有所述轴承的固定孔。
47.进一步的,所述第一固定板上设置有安装第一滑轨的第一安装面,所述第一安装面用于更稳定地固定第一滑轨,并加强使用稳定性,另外,所述第一滑轨与第一固定板之间通过螺纹固定或焊接固定。
48.进一步的,所述第二固定板下方设置有安装第二滑轨的第二安装面,所述第二安装面用于更稳定地固定第二滑轨,并加强使用稳定性,所述第二滑轨与第二固定板之间通过螺纹固定或焊接固定。
49.进一步的,所述第一固定板后端设置有固定第三固定板下端的第三安装面,第三固定板的下端设置在第一固定板上方,为了保证第三固定板与第一固定板之间的连接稳定性,第三固定板卡在第三安装面内,两者间通过螺栓固定或者焊接固定,以加强其稳固性。
50.进一步的,所述第二固定板后端设置有向下凸出的用于将第三安装板限位的凸出体,所述凸出体与凸出体后方的第二固定板部分形成第三安装板上端的第四安装面。第三固定板的上端设置在第二固定板的下方,为了保证第三固定板与第二固定板之间的连接稳定性,第三固定板卡在该凸出体内,该凸出体另一侧为第二滑轨,防止第三固定板在第二固定板上产生位移,并且,第二固定板与第三固定板之间通过螺栓固定或者焊接固定,更进一步加强其稳定性。
51.进一步的,所述第一滑板设置有第一齿条的第一安装限位槽,第一齿条设置在该
第一安装限位槽内,利用螺栓固定或焊接固定,保证了第一齿条不会发生位移,并进一步保证了连接稳固性。
52.进一步的,所述第二滑板设置有第二齿条的第二安装限位槽,第二齿条设置在该第二安装限位槽内,利用螺栓固定或焊接固定,保证了第二齿条不会发生位移,并进一步保证了连接稳固性。
53.进一步的,所述第三固定板包括一体成型的主体板及l型延伸部,所述l型延伸部的两端部设置有第一滑板与第二滑板的向上的限位凸出部,所述第一滑板和第二滑板在该限位凸出部之内滑动,限定滑动范围。
54.本公开中,第一固定板位于下方,承载了包括第一滑轨、第二滑轨及上方的第二固定板、第三固定板,其宽度大于第二固定板的宽度,第二固定板的宽度只覆盖下方第二滑轨。
55.可以理解到的是,本实用新型所述的第一滑板、第二滑板依靠第一滑块组和第二滑块组与第一滑轨和第二滑轨实现了位置固定。另外,滑块和滑轨组合为一上一下设置,保证了第一滑板和第二滑板的位置稳定性。
56.进一步的,所述左力臂和右力臂端部设置有与外骨骼机器人进行连接的连接件;为了实现本实用新型连接件的万向调节功能及随动功能,本公开在所述连接件与左力臂和右力臂之间都设置有滑动调节部:
57.所述滑动调节部包括与左力臂或右力臂固定连接的导轨连接板、设置在导轨连接板上的导轨及与连接件固定连接的第三滑块,所述第三滑块实现连接扣在导轨上的滑动,用以对使用者在行走时髋部的起伏进行调节;
58.本公开中,所述滑动调节部的导轨连接板可以任意方向设置,如横向设置、纵向设置、斜向设置,根据需要即可。特别是,在外骨骼机器人康复训练过程中,行走过程中髋部会有上下的起伏,此时,纵向设置的滑动调节部即可实现纵向的起伏调节,实现更科学、更顺畅的行走。
59.另外,左力臂和右力臂端部设置的连接件为万向调节连接件,所述万向调节连接件与所述左力臂和右力臂之间固定连接;
60.所述万向调节连接件包括位于外端的横向调节板及内端的纵向调节板,所述横向调节板内设置有横向调节孔,所述纵向调节板内设置有纵向调节孔,所述万向调节连接件还包括贯穿设置在横向调节孔和纵向调节孔内的转接头,所述转接头与横向调节板之间设置有一纵向贯穿的第一旋转轴,所述转接头和纵向调节板之间设置有一横向贯穿的第二旋转轴,所述横向调节板绕所述第一旋转轴实现横向的旋转调节,所述纵向调节板绕所述第二旋转轴实现纵向的旋转调节。
61.本公开所述的万向调节连接件的原理类似于十字万向轴,但本实用新型将两个轴分开设置。
62.更进一步的,为了保证横向调节板的调节功能,所述横向调节板与纵向调节板之间间隔一定距离,以保证横向调节板的调节空间。
63.可以理解到的是,本实用新型所述的万向调节连接件也可以是纵向调节板在前、横向调节板在后。
64.进一步的,所述第一旋转轴和第二旋转轴的两端部都设置有直径大于贯穿孔的限
位头。
65.本公开中,所述底盘包括横向的承重梁及与承重梁两端垂直连接的框架梁,所述框架梁下方设置有脚轮,外骨骼机器人(使用者)在承重梁与框架梁围成的空间内活动,所述承重梁中部连接立柱。所述承重梁和框架梁为空心金属的方管。
66.更进一步的,所述立柱包括内立柱和套设在内立柱上的外立柱,所述外立柱上固定同步调节装置。
67.更进一步的,所述外立柱上部设置有推杆支架,所述推杆支架连接设置有电动推杆,实现外立柱的电动控制上下移动,从而根据使用者的身高和使用习惯调节外骨骼机器人髋部的连接位置高低;
68.更进一步的,所述无源跟随吊架还配设有电池或电池组,所述电池为电动推杆供电,避免了电线的使用,保证了无源跟随吊架的移动和活动范围。所述电池或电池组设置在承重梁上或者框架梁上或外立柱上,优选为框架梁上,不会影响折叠坐凳的安装和使用。
69.更进一步的,所述承重梁上设置有焊接的固定板及与固定板螺栓连接的立柱安装板,所述立柱安装板上一体成型有伸入内立柱的内立柱安装座,所述内立柱安装座与内立柱通过螺栓连接。
70.更进一步的,所述外立柱上部还设置有向外的扶手。该扶手提供给康复治疗师或其他服务者使用,方便其扶持住跟随吊架或者推拉跟随吊架。
71.更进一步的,所述脚轮组为框架梁两端的4个定向脚轮或框架梁两端的分别为靠近立柱的2个活动脚轮和远离立柱的2个定向脚轮。
72.详细的,当为4个定向脚轮时,所述跟随吊架实现直线方向上的行进或后退;当为2个活动脚轮(也可以称之为万向轮)以及2个定向脚轮配合时,可是实现转弯和避障功能,使得跟随吊架的使用更为灵活和相比直线更有趣。并且,一般活动脚轮设置在靠近立柱的两个框架梁端部,2个定向脚轮设置在另外两个框架梁端部。
73.在上述的一些同步调节装置的实施方式中,所述同步调节装置外部设置有上下扣合的上外壳和下外壳,以保护装置不受污染和美观要求。
74.更进一步的,为了更为美观和清洁,以及保证部件的使用,所述电动推杆下方与立柱连接处设置有电动推杆外壳;所述电池外部设置有电池外壳。
75.本实用新型的优点:
76.1、折叠椅实现了使用者的随时休息坐下,避免了当使用者体力不支或出现其他情况时由于无快速休息位置时,强行坚持行走到休息位置时发生的安全隐患,或者无法快速提供休息座位,需要挑选座位塞进跟随吊架内。
77.2、同步调节装置实现了髋部的自动同步调节,不需要手动操作,且不会出现侧倾的现象,操作方便、安全性能更高。
78.3、同步调节装置的两组滑轨和滑块组合,在前的位于下方,在后的位于上方,实现了前后的力矩抵消,并且三块安装板的设置进一步保证了连接的稳固性,避免了因负载过重导致的损坏从而对使用者的安全造成影响。且使用时,更为平顺稳定,体验感更好。
79.4、电动推杆实现了自动化的调高和调低,能实现减重支撑系统的训练环境,更利于使用者的轻便使用、减轻肌肉负担和心肺负荷,同时,降低了康复治疗师工作负担,只需要在扶手的作用下保证使用者的安全和跟随吊架的行进路线。
80.5、滑动调节部和万向调节连接件实现了使用者在康复训练过程中的更科学的步态,保证了髋部在行走状态时的活动空间,以及髋部在行走过程中的前后上下各个方向的旋转起伏调节功能。
附图说明
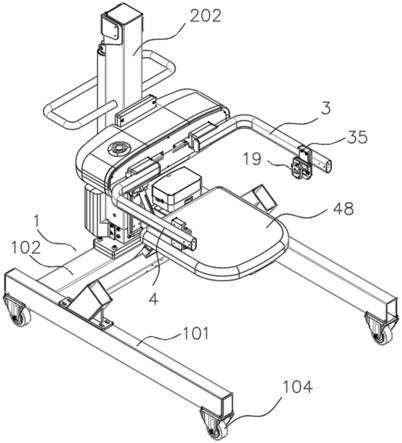
81.图1为本实用新型所述跟随吊架的立体示意图一。
82.图2为本实用新型所述跟随吊架的立体示意图二。
83.图3为本实用新型所述跟随吊架的侧视图。
84.图4为本实用新型所述折叠坐凳的示意图。
85.图5为本实用新型所述同步调节装置的内部示意图。
86.图6为本实用新型所述第一固定板的示意图。
87.图7为本实用新型所述第二固定板的示意图。
88.图8为本实用新型所述第三固定板的示意图。
89.图9为本实用新型所述第一滑板的示意图。
90.图10为本实用新型所述第二滑板的示意图。
91.图11为本实用新型所述万向调节连接件的爆炸示意图。
92.图12为本实用新型所述万向调节连接件的立体示意图。
93.图13为本实用新型所述滑动调节部的示意图。
94.图14为本实用新型所述折叠坐凳折叠后跟随吊架的的示意图。
95.附图标记:底盘1、立柱2、左力臂3、右力臂4、第一滑板5、第二滑板6、第一滑轨7、第二滑轨8、第一固定板9、第二固定板10、第一滑块组11、第二滑块组12、第一齿条13、第二齿条14、齿轮15、齿轮轴16、滑板连接板17、第三固定板18、万向调节连接件19、横向调节板20、纵向调节板21、横向调节孔22、纵向调节孔23、转接头24、第一旋转轴25、第二旋转轴26、滑动调节部35、导轨连接板36、导轨37、第三滑块38、折弯39、折叠坐凳40、固定架41、旋转板安装板42、旋转板43、调节管44、调节滑轨45、调节管安装板46、调节滑块47、凳面48、凳面支架49、调节外管441、调节内管442、框架梁101、承重梁102、脚轮104、内立柱201、外立柱202、电推杆203、推杆上支架204、电动推杆外壳205、电池外壳206、扶手207。
具体实施方式
96.以下介绍只是本实用新型多个实施例中的一些,旨在提供对本实用新型的基本了解,并不在于确认本实用新型的关键或决定性的要素或本实用新型所要保护的范围。
97.如图1、图2、图3所示,在本实施例中,所述环形力臂包括左力臂3及右力臂4,所述左力臂3和右力臂4端部设置有连接外骨骼机器人的连接件19。
98.本实施例中,所述左力臂3和右力臂4为空心管,材料可以选择硬塑料或者金属管,为了保证材料强度,优选金属管。
99.需要使用时,使用者将外骨骼机器人穿戴好之后,移动到跟随吊架内,将外骨骼机器人与连接件19进行连接,一般的连接位置位于外骨骼机器人的髋部,此位置的连接不会影响外骨骼机器人的活动。
100.需要指出的是,本实用新型提供的跟随吊架也可以给不使用外骨骼机器人的使用
者进行康复训练,此时,可以作为位移机使用。使用者在抓住力臂的情况下,将跟随吊架作为支撑和保护。必要时,可以在跟随吊架上设置腰部绑带或其他绑缚件进行与使用者的支撑固定。
101.底盘:
102.本实施例中,如图1、图2、图3所示,所述底盘1为门型框架,两侧为框架梁101,横向的与框架梁101固定的承重梁102,所述立柱2安装固定在承重梁上,且位于承重梁102中部位置。为了减轻重量,所述承重梁和框架梁优先选择使用空心的金属方管。各方管的外端部设置堵头。
103.本实施例中,框架梁101下部连接设置有脚轮组104。
104.本实施例中,脚轮组104的设置方式有2种:
105.1、每个框架梁的端部设置有1个定向脚轮,共计4个定向脚轮,定向轮实现直线型的行进和后退,因为需要保持下肢残弱者的直线行进步态,不使跟随吊架在其他非使用者意愿的情况下出现向两侧的位移,又因为一般的外骨骼机器人本身设定的对于下肢残弱者的步态中并不出现转弯情况,所以得保持外骨骼机器人的直线行进路线。
106.2、每个框架梁的端部都设置1个脚轮,在靠近立柱的两根框架梁的后端设置的脚轮为万向脚轮,前方设置的脚轮为定向脚轮,实现行进路线的变向需求,一是适应有些使用者本身可能出现的转向情况,另一方面可以实现跟随吊架在行进中的路线变化或避障功能,此时,康复治疗师或其他服务者也可以主动推动该跟随吊架进行变向。
107.立柱:
108.如图1、图2所示,本实用新型提供的跟随吊架,其同步调节装置可调整高度。实现该高度调节的方式里,立柱2包括内立柱201与套设在内立柱外的外立柱202,同步调节装置固定在外立柱202上,并且,外立柱202上还设置了电动推杆203以及固定电动推杆203上部的推杆上支架204及固定推杆下部的推杆下支架,所述电动推杆203实现外立柱202的上下移动,从而调节同步调节装置的位置,外骨骼机器人与跟随吊架连接之后,还可以实现外骨骼机器人的上下移动
109.折叠坐凳40:
110.如图1、图2、图3、图4所示,所述折叠坐凳40包括折叠部分和固定部分;
111.所述固定部分包括设置在两侧框架梁上的外倾的固定架41、设置在固定架41上的旋转板安装板42及固定在外立柱上的调节滑轨45;
112.所述折叠部分包括与旋转板安装板42上端铰接的旋转板43、与旋转板43下部铰接的调节管44、与调节管44外端部铰接的调节管安装板46及与调节管安装板46连接的在调节滑轨45上进行上下滑动的调节滑块47,所述旋转板安装板42位于旋转板43两侧,形成旋转板43与旋转板安装板42的铰接。
113.所述旋转板43外端设置凳面48,所述调节管44随调节滑块47下压使得旋转板向下翻转进而凳面48逐渐放平,所述调节管44随调节滑块47向上提拉使得旋转板43向上翻转进而凳面48逐渐向下折叠。
114.具体的,为了保证折叠坐凳40的折叠顺畅性,以及避免折叠时垂直方向上的作用力互相抵消以致无法顺畅折叠的问题,所述固定架41向外倾斜于框架梁101。
115.同时,为了增加调节管44的调节量,以避免外立柱上升距离较长时,使用较长的调
节管影响固定架的设置位置,从而影响外骨骼机器人的行动。本实用新型采用了多节型的调节管,包括与旋转板下部铰接的调节外管441和在调节外管内移动的、与调节管安装板46铰接的调节内管442。
116.特别的,所述调节内管442与调节外管441之间设置有拉簧,坐凳40展平时,所述调节内管442处在调节外管441内,当外立柱202上升需要将坐凳40折叠时,调节外管441随调节滑块47上升时,会形成对调节内管442的拉力,进而调节内管442直接开始拉动旋转板43旋转,形成坐凳40的向下折叠,避免外骨骼机器人已经站立或者半蹲状态时,坐凳40还未开始向下折叠或者只折叠了很小的角度,从而对外骨骼机器人腿部的活动产生影响。
117.本实施例中,本实施例在旋转板上可以直接安装凳面。
118.为了保证凳面安装的稳固性,本实施例在旋转板43外端设置有凳面支架49,所述凳面48安装在凳面支架49上,所述凳面支架49在坐凳40展平后水平,如图1所示,与旋转板平行或具有夹角,优选为凳面支架倾斜设置在旋转板43外端。
119.本实施例中,所述调节滑轨45上端和下端设置有调节滑块限位块,当调节滑块滑到调节滑轨45的最上端时,所述凳面48完全展平;所述调节滑块48滑到调节滑轨45的最下端时,所述凳面48至少折叠到垂直于框架梁101,如图14所示,不会对外骨骼机器人的活动产生影响。
120.同步调节装置:
121.如图1
‑
图10所示,在本实施例中,本实用新型提供的跟随吊架设置了同步调节装置。该同步调节装置与外立柱连接固定,并连接左力臂3和右力臂4,左力臂3内端部连接有第一滑板5,右力臂4内端部连接有第二滑板6,滑板与力臂的连接方式可以是焊接,也可以是螺栓固定或其他方式。
122.该同步调节装置有两种实施方式:
123.1、在第一滑板和第二滑板的上方或下方安装1条或2条滑轨,所述滑轨横跨在第一滑板和第二滑板的上方或下方。第一滑板和第二滑板与滑轨之间设置能延该滑轨滑动的滑块,这样,当滑轨安装1条时,滑块为2个,当滑轨安装2条时,滑块为4个。
124.需要说明的是,滑块与第一滑板或第二滑板之间都是固定连接,通过螺栓或者焊接形成固定。
125.滑块固定在滑板上,滑轨固定在固定板上,固定板与立柱固定连接,形成一定的固定效果。
126.同步调节方式:
127.位于第一滑板上方或下方的第一齿条及与第一齿条相对的位于第二滑板下方或上方的第二齿条,所述第一齿条与第二齿条在内端与同一齿轮啮合,所述齿轮通过齿轮轴与立柱固定,实现任一力臂的移动都可以同时带动另一力臂的同步反向移动。
128.2、如图5所示,滑轨有两条:位于第一滑板5和第二滑板6下方的、靠近左力臂与右力臂的第一滑轨7及位于第一滑板5和第二滑板6上方的、靠近立柱的第二滑轨8,实现滑轨的上下分开设置;
129.每条滑轨都有一个固定板:位于第一滑轨7下方用于固定第一滑轨7的第一固定板9及位于第二滑轨6上方用于固定第二滑轨6的第二固定板10,所述第一固定板9和第二固定板10都与立柱2固定连接;
130.固定在第一滑板5和第二滑板6下方的、与第一滑轨7配合滑动的第一滑块组11(第一滑板和第二滑板下方各设置一块)及固定在第一滑板5和第二滑板6上方的、与第二滑轨8配合滑动的第二滑块组12(第一滑板和第二滑板的上方各设置一块);及
131.位于第一滑板5上方或下方的第一齿条13及与第一齿条13相对的位于第二滑板6下方或上方的第二齿条14,所述第一齿条13与第二齿条14在内端与同一齿轮15啮合,所述齿轮15通过齿轮轴16与立柱2固定,实现任一力臂的移动都可以同时带动另一力臂的同步反向移动。
132.可以理解到的是,以上两种方式都可以实现同步的髋部宽度调节,但第1种方式的稳定性不够强。而第2种方式,其设置的上下两组滑轨和滑块装置,根据力矩分析,提供了更强的稳定性和负载能力,有利于达到跟随吊架减重条件下的训练环境,体重较重使用者也能放心使用。
133.另外,上述两种实现方式中,所述左力臂3和右力臂4与第一滑板5和第二滑板6之间使用螺栓进行固定连接,更为具体的是,所述第一滑板5和第二滑板6的后端都设置有滑板连接板17,该滑板的主体和滑板连接板17为一体成型件,所述滑板连接板17与左力臂3或右力臂4都是焊接固定或螺栓固定。
134.更为具体的,所述滑板连接板17与力臂连接板固定,所述力臂连接板与力臂为焊接或螺栓固定。
135.本实施例中,如图1所示,所述立柱2上固定有同步调节装置安装板21,所述同步调节装置安装板21上固定有第三固定板18,所述第三固定板18下端与第一固定板9固定,上端与第二固定板10固定;三块固定板之间互相固定,且三块固定板都与立柱固定,提供更稳固的固定效果,使用稳定性更强。
136.更进一步的,所述齿轮轴后端部设置有轴承,所述第三固定板中部位置设置有所述轴承的固定孔,齿轮轴插入该固定孔后,实现轴承的固定。
137.如图6所示,所述第一固定板9上设置有安装第一滑轨7的第一安装面61,所述第一安装面61用于更稳定地固定第一滑轨7,并加强使用稳定性,另外,所述第一滑轨与第一固定板之间通过螺纹固定或焊接固定。
138.同时,所述第一固定板9后端设置有固定第三固定板18下端的第三安装面63,第三固定板18的下端设置在第一固定板上方,为了保证第三固定板与第一固定板之间的连接稳定性,第一安装面61和第三安装面63之间设置有凸台,用以形成两者的限位作用。所述第三固定板卡在第三安装面内,两者间通过螺栓固定或者焊接固定,以加强其稳固性。
139.本实施例中,如图7所示,所述第二固定板下方设置有安装第二滑轨的第二安装面62,所述第二安装面62用于更稳定地固定第二滑轨8,并加强使用稳定性,所述第二滑轨8与第二固定板62之间通过螺纹固定或焊接固定。
140.更为具体的,所述第二固定板10后端设置有向下凸出的用于将第三安装板18限位的第三安装板凸出体65,所述凸出体与凸出体后方的第二固定板部分形成第三安装板上端的第四安装面64。第三固定板18的上端设置在第二固定板10的下方,为了保证第三固定板与第二固定板之间的连接稳定性,第三固定板卡在该第三安装板凸出体65内,该第三安装板凸出体65另一侧为第二滑轨,防止第三固定板在第二固定板上产生位移,并且,第二固定板与第三固定板之间通过螺栓固定或者焊接固定,更进一步加强其稳定性。
141.本实施例中,如图8所示,所述第三固定板18包括一体成型的主体板及l型延伸部68,所述l型延伸部68的两端部设置有第一滑板5与第二滑板6的向上的限位凸出部69,所述第一滑板5和第二滑板6在该限位凸出部之内滑动,限定滑动范围。
142.本实施例中,如图9所示,所述第一滑板5设置有第一齿条的第一安装限位槽66,第一齿条13设置在该第一安装限位槽66内,利用螺栓固定或焊接固定,保证了第一齿条13不会发生位移,并进一步保证了连接稳固性。
143.本实施例中,如图10所示,所述第二滑板6设置有第二齿条13的第二安装限位槽67,第二齿条14设置在该第二安装限位槽67内,利用螺栓固定或焊接固定,保证了第二齿条14不会发生位移,并进一步保证了连接稳固性。
144.本实施例中,第一固定板9位于下方,承载了包括第一滑轨、第二滑轨及上方的第二固定板、第三固定板,其宽度大于第二固定板的宽度,第二固定板的宽度只覆盖下方第二滑轨。
145.可以理解到的是,本实用新型所述的第一滑板、第二滑板依靠第一滑块组和第二滑块组与第一滑轨和第二滑轨实现了位置固定。另外,滑块和滑轨组合为一上一下设置,保证了第一滑板和第二滑板的位置稳定性。
146.滑动调节部35:
147.本实施例中,如图1和图13所示,本公开在左力臂的连接件与左力臂3之间都设置有滑动调节部35,右力臂的连接件与右力臂4之间也设置有滑动调节部35。
148.具体的,如图13所示,所述滑动调节部35包括与左力臂3或右力臂4固定连接的导轨连接板36、设置在导轨连接板36上的导轨37及与连接件(吊架快拆扣)固定连接的第三滑块38,所述第三滑块38实现连接扣在导轨37上的滑动,用以对使用者在行走时髋部进行起伏调节。导轨和导轨连接板之间螺栓固定。导轨连接板与左力臂或者右力臂之间螺栓固定。
149.特别的,所述滑动调节部的导轨连接板36可以垂直设置、水平设置或者斜向设置,根据髋部在行走时的起伏进行多向调节,特别是纵向上的调节,因为在行走时,髋部会有一定的上下起伏。
150.同时,导轨连接板36的上端和下端设置有折弯39,作为第三滑块38在导轨37上上下滑动范围的限制。
151.万向调节连接件19:
152.本实施例中,如图11和图12所示,为了实现行走时髋部的万向转动,所述第三滑块38连接有万向调节连接件19。
153.可以理解到的是,本实用新型所述跟随吊架可以仅设置万向调节连接件19,也可以在万向调节连接件19的基础上,再设置滑动调节部35。当仅设置万向调节连接件19时,所述万向调节连接件与所述左力臂3与右力臂4分别直接固定。
154.具体的,所述万向调节连接件19包括位于外端的横向调节板20及内端的纵向调节板21。
155.所述横向调节板19内设置有横向调节孔22,所述纵向调节板20内设置有纵向调节孔23,所述万向调节连接件还包括贯穿设置在横向调节孔22和纵向调节孔23内的转接头24,所述转接头24与横向调节板20之间设置有一纵向贯穿的第一旋转轴25,所述转接头24和纵向调节板21之间设置有一横向贯穿的第二旋转轴26,所述横向调节板20绕所述第一旋
转轴25实现横向的旋转调节,所述纵向调节板21绕所述第二旋转轴26实现纵向的旋转调节。
156.其中,横向调节孔22和纵向调节孔23的孔径长度大于转接头24在该孔内的长度,以留出转接头的活动空间。
157.其中,所述第三滑块38连接所述纵向调节板21实现第三滑块38与万向调节连接件19的连接。
158.如图所示,外骨骼机器人与所述横向调节板20连接,一般来说,外骨骼机器人的髋部可以作为连接点,横向调节板上设置有螺孔,髋部与该横向调节板螺纹连接实现固定。
159.此外,所述万向调节连接件的设置位置也是可调的,所述力臂上设置有螺孔组,选择好连接件的安装位置后即可通过螺孔实现与滑动调节部或者万向调节连接件的螺纹固定连接。当然,固定方式也可以是其他种类的,如粘扣、卡扣、焊接等。
160.可以理解到的是,本实用新型所述万向调节连接件也可以是纵向调节板21在外,横向调节板20在内,第一旋转轴、第二旋转轴、纵向穿孔等相应调整。
161.本万向调节连接件的原理类似于十字万向轴,但本实用新型将两个轴分开设置。
162.更进一步的,为了保证横向调节板的调节功能和调节空间,所述横向调节板与纵向调节板之间间隔一定距离,以保证横向调节板在旋转时的向后的活动空间。
163.可以理解到的是,本实用新型所述的万向调节连接件也可以是纵向调节板在前、横向调节板在后。
164.进一步的,所述第一旋转轴和第二旋转轴的两端部都设置有直径大于贯穿孔的限位头。
165.在本实施例中,如图1、图2所示,给电动推杆203的电缸进行供电的是电池或电池组,所述电池或电池组设置在立柱下方。
166.在本实施例中,所述外立柱上部还设置有向外的供康复医疗师或其他服务者使用的扶手207,便于控制跟随吊架和保护使用者。
167.同时,该电动推杆203底部设置有电动推杆外壳205,电池或电池组外也设置有电池外壳206,保证了跟随吊架的美观,也起到防尘等保护功能。
168.此外,所述同步调节装置外设设置有同步调节装置外壳208。
169.可以理解到的是,本实用新型提供的跟随吊架可以实现多种使用功能:
170.1、使用者连接外骨骼机器人时的跟随功能。
171.2、使用者不连接外骨骼机器人时,可以作为位移机使用,使用者抓住力臂实现上肢的扶持,下肢可以在位跟随吊架内进行活动并带动跟随吊架前进或后退。
172.为了易于描述而使用诸如“在
…
之下”、“在
…
之上”、“低于”、“高于”、“上方”、“下方”等空间上相对的术语以及解释一个要素相对于第二要素的定位。除了在与各图中描绘的那些不同的定向之外,这些术语还意图涵盖相应器件的不同定向。进一步的,诸如“第一”和“第二”等的术语也被用于描述各种要素、区域、区段等并且也不意图进行限制。贯穿于描述同样的术语指代同样的要素。
173.如在此使用的那样,术语“具有”、“包含”、“包括”、“包括有”和“表现”等是开放式的术语,其指示所声明的要素或者特征的存在,但是不排除附加的要素或者特征。
174.在谨记以上范围的变化和应用的情况下,应当理解的是本实用新型不受前述描述
限制,也不受随附附图限制。相反,本实用新型仅由权利要求及其法律等同物限制。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1