一种消毒机器人的制作方法
1.本实用新型是关于空气消毒技术领域,尤其涉及一种消毒机器人。
背景技术:
2.目前市场空气消毒产品的固定方式主要有以下两种:(1)手动移动式:消毒时需要靠人来移动,放置在响应位置,浪费人力;(2)固定式:固定在墙壁或吊顶,消毒效果覆盖不如移动式,且只能用于某一房间,利用率低。消毒方式主要有以下四种:(1)紫外线照射:优点是消毒能力强,可对空气及硬质物表进行消毒,缺点是不能用于有人环境下消毒;(2)喷洒消毒液:优点是消毒能力强,缺点是不能用于有人环境下消毒;(3)紫外线循环风;(4)等离子循环风:对于紫外线循环风和等离子循环风,优点是可用于有人环境消毒,缺点是不能用于物表消毒。
3.现有技术中的消毒机器人,多为紫外线或喷雾单一消毒模式,功能单一,消毒能力一般;不能同时适应有人和无人场景下的空气消毒,适应能力差,使用场景有局限性;自动化程度,需要人工参与,浪费大量人力。故一款能够实现有人和无人场景、且消毒能力更强的空气消毒机器人是消毒市场亟待解决的问题。
4.由此,本发明人凭借多年从事相关行业的经验与实践,提出一种消毒机器人,以克服现有技术的缺陷。
技术实现要素:
5.本实用新型的目的在于提供一种消毒机器人,能实现有人和无人场景的空气消毒,适应能力更强,且消毒能力更强。
6.本实用新型的目的是这样实现的,一种消毒机器人,包括:
7.壳体;
8.消毒组件,设在壳体内,消毒组件包括紫外线照射消毒机构、过氧化氢干雾消毒机构和循环风消毒机构;
9.人体检测模块,设在壳体上;
10.以及控制器,设在壳体内,控制器与紫外线照射消毒机构、过氧化氢干雾消毒机构、循环风消毒机构和人体检测模块电连接,并能在人体检测模块的检测结果为无人状态时驱动紫外线照射消毒机构和/或过氧化氢干雾消毒机构工作,在人体检测模块的检测结果为有人状态时驱动循环风消毒机构工作。
11.在本实用新型的一较佳实施方式中,在壳体的底部还设有移动底盘,控制器设在移动底盘上,控制器与移动底盘电连接并能驱动移动底盘移动。
12.在本实用新型的一较佳实施方式中,移动底盘包括底框架以及对称设在底框架的底部两侧的两个伺服轮毂,控制器设在底框架内并与两个伺服轮毂电连接。
13.在本实用新型的一较佳实施方式中,在底框架的底部且位于每个伺服轮毂的两侧均设有前万向轮和后万向轮;伺服轮毂通过驱动支架连接在底框架的底部,前万向轮连接
在前支架的底部,且前支架与驱动支架能使前支架上下摆动地枢接,后万向轮通过后支架连接在底框架的底部。
14.在本实用新型的一较佳实施方式中,在底框架上还设有用于检测消毒机器人所在位置的定位检测模块,控制器与定位检测模块电连接,并能根据定位检测模块检测的位置信息驱动移动底盘移动,以将消毒机器人移动至目标位置。
15.在本实用新型的一较佳实施方式中,人体检测模块为人体红外感应模块,定位检测模块包括激光雷达模块、惯导模块或者超宽带模块中的一种或者多种的组合。
16.在本实用新型的一较佳实施方式中,紫外线照射消毒机构包括紫外灯组件和升降组件,紫外灯组件包括支撑外壳,支撑外壳的顶部伸出壳体的顶部,人体检测模块设在支撑外壳的顶部;在支撑外壳的中部沿其周向间隔设有多个第一紫外灯,支撑外壳的底部与升降组件连接;控制器与第一紫外灯和升降组件电连接,并能驱动升降组件带动紫外灯组件上下移动。
17.在本实用新型的一较佳实施方式中,升降组件包括固定机座、电机、传动机构和滑块,固定机座固定在壳体内,电机设在固定机座的底部,滑块能滑动地套设在固定机座上,电机通过传动机构与滑块连接,并能驱动滑块上下滑动;支撑外壳的底部与滑块固定连接,控制器与电机电连接并能驱动电机转动。
18.在本实用新型的一较佳实施方式中,传动机构包括主动轮、从动轮以及连接在主动轮和从动轮之间的同步带,主动轮设在固定机座的底部并与电机的输出轴固定连接,从动轮设在固定机座的顶部,同步带与滑块固定连接。
19.在本实用新型的一较佳实施方式中,过氧化氢干雾消毒机构包括雾化组件和过氧化氢储液箱,雾化组件包括雾化水箱,在雾化水箱内设有雾化器,在雾化水箱的顶面连通有出雾管道;在雾化水箱的顶部设有第一隔膜泵和第二隔膜泵,第一隔膜泵的入口端和第二隔膜泵的出口端分别通过相应的管路与过氧化氢储液箱连通,第一隔膜泵的出口端和第二隔膜泵的入口端均与雾化水箱的内部连通;控制器与雾化器、第一隔膜泵和第二隔膜泵电连接。
20.在本实用新型的一较佳实施方式中,过氧化氢干雾消毒机构还包括用于检测空气浓度的过氧化氢浓度检测模块,控制器与过氧化氢浓度检测模块电连接。
21.在本实用新型的一较佳实施方式中,过氧化氢干雾消毒机构还包括纯水储液箱和第三隔膜泵,第三隔膜泵的入口端通过管路与纯水储液箱连通,第三隔膜泵的出口端与雾化水箱的内部连通,控制器与第三隔膜泵电连接。
22.在本实用新型的一较佳实施方式中,雾化水箱的内部形成上下连通的第一腔室和第二腔室,第一腔室的体积大于第二腔室的体积;在第二腔室内填充有填充块,在填充块的底部开设有安装槽,在填充块的顶面开设有多个与安装槽连通的第一通孔,第一通孔的数量与雾化器的雾化头的数量相同;雾化器嵌设在安装槽内并与安装槽的槽底之间留有预设间隙。
23.在本实用新型的一较佳实施方式中,在雾化水箱内还设有用于检测第一水位的第一浮球开关以及用于检测第二水位的第二浮球开关,第一水位低于第二水位;在填充块的顶面还设有两个与安装槽连通的第二通孔,第一浮球开关和第二浮球开关的端部分别插设在两个第二通孔中;控制器与第一浮球开关和第二浮球开关电连接,并能根据第一浮球开
关或第二浮球开关的检测结果控制第一隔膜泵工作。
24.在本实用新型的一较佳实施方式中,过氧化氢储液箱和纯水储液箱的底部分别设有第一称重感应器和第二称重感应器,控制器与第一称重感应器和第二称重感应器电连接。
25.在本实用新型的一较佳实施方式中,循环风消毒机构包括循环风箱,在循环风箱内设有多个第二紫外灯和多个等离子发生器;在循环风箱的两端分别作为进风端和出风端,在出风端处设有风扇,控制器与第二紫外灯、等离子发生器和风扇电连接。
26.在本实用新型的一较佳实施方式中,消毒组件还包括消毒支架,消毒支架的底部固定在移动底盘上,紫外线照射消毒机构、过氧化氢干雾消毒机构和循环风消毒机构均固定在消毒支架上,壳体的顶部与消毒支架的顶部固定连接。
27.在本实用新型的一较佳实施方式中,在壳体的底部外侧设有多个摄像头和多个超声波检测模块,控制器与摄像头和超声波检测模块电连接。
28.在本实用新型的一较佳实施方式中,在壳体的底部边缘套设有触边检测胶条,控制器与触边检测胶条电连接。
29.在本实用新型的一较佳实施方式中,在壳体上还设有启动按钮和急停按钮;在壳体的顶部安装有灯带,控制器与灯带电连接,并能根据消毒机器人的不同运行状态控制灯带发不同颜色的光。
30.由上所述,本实用新型中的消毒机器人,通过人体检测模块能检测周边环境是否有人,在无人状态时利用控制器能控制紫外线照射消毒机构和/或过氧化氢干雾消毒机构进行消毒工作,在有人状态时能控制循环风消毒机构进行消毒工作,自动化程度高,实现了自动适应有人和无人场景下的空气消毒,适应能力更强,可以应用于多种使用场景。同时无人时可以利用紫外线照射消毒机构和过氧化氢干雾消毒机构同时消毒,消毒能力更强。
附图说明
31.以下附图仅旨在于对本实用新型做示意性说明和解释,并不限定本实用新型的范围。其中:
32.图1:为本实用新型提供的消毒机器人的主视图。
33.图2:为本实用新型提供的消毒机器人的立体结构图。
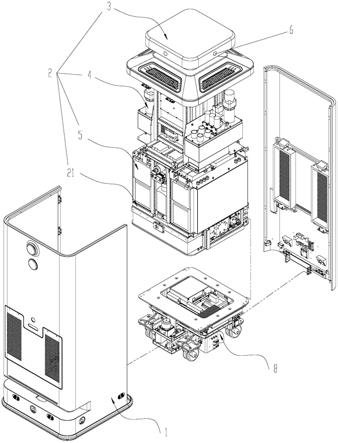
34.图3:为本实用新型提供的消毒机器人的爆炸示意图。
35.图4:为本实用新型提供的移动底盘的结构示意图一。
36.图5:为本实用新型提供的移动底盘的结构示意图二。
37.图6:为本实用新型提供的移动底盘的结构示意图三。
38.图7:为本实用新型提供的移动底盘的爆炸示意图。
39.图8:为本实用新型提供的消毒组件的主视图。
40.图9:为本实用新型提供的消毒组件的立体结构图。
41.图10:为本实用新型提供的消毒组件的爆炸示意图。
42.图11:为本实用新型提供的紫外线照射消毒机构的剖视图。
43.图12:为本实用新型提供的紫外线照射消毒机构的爆炸示意图。
44.图13:为本实用新型提供的雾化组件的剖视图。
45.图14:为本实用新型提供的雾化组件的爆炸示意图。
46.图15:为本实用新型提供的填充块的结构示意图。
47.图16:为本实用新型提供的循环风消毒机构的剖视图。
48.图17:为本实用新型提供的循环风消毒机构的爆炸示意图。
49.图18:为本实用新型提供的壳体的爆炸示意图。
50.附图标号说明:
51.1、壳体;11、摄像头;12、超声波检测模块;13、触边检测胶条;14、启动按钮;15、急停按钮;16、前壳体;161、进风孔;17、后壳体;171、出风孔;172、驱动板;18、灯罩;181、灯带;19、顶壳;191、中心孔;192、干雾出口栅格;
52.2、消毒组件;21、消毒支架;22、电气控制模组;
53.3、紫外线照射消毒机构;
54.31、紫外灯组件;311、支撑外壳;3111、筒状外壳;3112、顶板;3113、顶罩;312、第一紫外灯;313、第一镇流器;
55.32、升降组件;321、固定机座;3211、固定底板;3212、导向柱;322、电机;323、传动机构;3231、主动轮;3232、从动轮;3233、同步带;324、滑块;325、驱动器;
56.4、过氧化氢干雾消毒机构;
57.41、雾化组件;411、雾化水箱;4111、水槽盖;4112、雾化水槽;4113、第一腔室;4114、第二腔室;412、雾化器;4121、雾化头;413、出雾管道;4131、管道风机;414、第一隔膜泵;415、第二隔膜泵;416、第三隔膜泵;417、填充块;4171、安装槽;4172、第一通孔;4173、第二通孔;418、第一浮球开关;419、第二浮球开关;42、过氧化氢储液箱;43、纯水储液箱;44、过氧化氢浓度检测模块;45、安装板;
58.5、循环风消毒机构;
59.51、循环风箱;52、第二紫外灯;53、等离子发生器;54、风扇;55、第二镇流器;56、进风滤网;57、出风滤网;
60.6、人体检测模块;
61.7、控制器;
62.8、移动底盘;
63.81、底框架;82、伺服轮毂;83、前万向轮;84、后万向轮;85、驱动支架;851、连接座;852、枢轴;86、前支架;861、水平板;862、竖直板;87、后支架;88、挡泥罩;89、定位检测模块。
具体实施方式
64.为了对本实用新型的技术特征、目的和效果有更加清楚的理解,现对照附图说明本实用新型的具体实施方式。
65.如图1至图18所示,本实施例中提供一种消毒机器人,包括:
66.壳体1;
67.消毒组件2,设在壳体1内,消毒组件2包括紫外线照射消毒机构3、过氧化氢干雾消毒机构4和循环风消毒机构5;
68.人体检测模块6,设在壳体1上;
69.以及控制器7,设在壳体1内,控制器7与紫外线照射消毒机构3、过氧化氢干雾消毒
机构4、循环风消毒机构5和人体检测模块6电连接,并能在人体检测模块6的检测结果为无人状态时驱动紫外线照射消毒机构3和/或过氧化氢干雾消毒机构4工作,在人体检测模块6的检测结果为有人状态时驱动循环风消毒机构5工作。
70.其中,一般人体检测模块6设在壳体1的顶部,控制器7设在壳体1的底部,人体检测模块6能感知周边环境状态,用于检测是否有人,本实施例中人体检测模块6优选采用人体红外感应模块,具体结构和检测过程为现有技术。
71.由此,本实施例中的消毒机器人,通过人体检测模块6能检测周边环境是否有人,在无人状态时利用控制器7能控制紫外线照射消毒机构3和/或过氧化氢干雾消毒机构4进行消毒工作,在有人状态时能控制循环风消毒机构5进行消毒工作,自动化程度高,实现了自动适应有人和无人场景下的空气消毒,适应能力更强,可以应用于多种使用场景。同时无人时可以利用紫外线照射消毒机构3和过氧化氢干雾消毒机构4同时消毒,消毒能力更强。
72.在具体实现方式中,为了在消毒时方便移动,减少人力,如图1至图7所示,在壳体1的底部还设有移动底盘8,控制器7设在移动底盘8上,控制器7与移动底盘8电连接并能驱动移动底盘8移动。一般移动底盘8包括底框架81以及对称设在底框架81的底部两侧的两个伺服轮毂82,控制器7设在底框架81内并与两个伺服轮毂82电连接。
73.其中,整个底框架81主要用来固定机器电源部分配件以及固定承载消毒组件2,例如电池、变压器和充放电模块以及控制器7等电气模块均设在底框架81内,消毒组件2的底部固定在底框架81上。对于伺服轮毂82的结构为现有技术,整个移动底盘8通过伺服轮毂82的输出牵引力,为整机移动提供动力。
74.在实际应用中,为了提高移动底盘8移动时的灵活性和平稳性,如图7所示,在底框架81的底部且位于每个伺服轮毂82的两侧均设有前万向轮83和后万向轮84。伺服轮毂82通过驱动支架85连接在底框架81的底部,前万向轮83连接在前支架86的底部,且前支架86与驱动支架85能使前支架86上下摆动地枢接,后万向轮84通过后支架87连接在底框架81的底部。其中,消毒机器人在移动时两个前万向轮83位于移动的前方。
75.如此,在底框架81的四个边角处各有一个万向轮,且两个伺服轮毂82分别位于对应的前万向轮83和后万向轮84之间,由于前支架86与驱动支架85枢接,在遇到路面不平时前支架86与驱动支架85会相对转动,实现了伺服轮毂82能够根据负载上下浮动,保证了伺服轮毂82的抓地力,避免出现中间完全悬空的情况,有效保证了移动过程中的平稳性。
76.一般为了便于加工和安装,上述的驱动支架85为开口朝向后万向轮84的u形板,前支架86包括水平板861以及固定在水平板861侧部的竖直板862,在u形板靠近前万向轮83的板面上对称间隔固定有两个连接座851,在两个连接座851之间固定有水平设置的枢轴852,竖直板862通过轴承与枢轴852能转动连接。
77.可以理解,在竖直板862上开设有安装孔,枢轴852穿设在安装孔内并通过轴承与安装孔连接,以使前支架86能够相对于驱动支架85上下摆动。上述的两个连接座851均优选为l形板,每个l形板的其中一个板面竖直设置并与u形板和枢轴852固定连接,另一个板面水平设置并通过螺栓与底框架81固定连接。优选地,在每个伺服轮毂82的外部间隔套设有挡泥罩88,挡泥罩88与u形板的两侧板固定连接,以对伺服轮毂82起到保护作用。
78.进一步地,为了便于实现移动底盘8的自助移动,如图7所示,在底框架81上还设有用于检测消毒机器人所在位置的定位检测模块89,控制器7与定位检测模块89电连接,并能
根据定位检测模块89检测的位置信息驱动移动底盘8移动,以将消毒机器人移动至目标位置。
79.其中,该定位检测模块89固定在底框架81的前方,定位检测模块89优选包括激光雷达模块、惯导模块或者超宽带模块(即uwb模块)中的一种或者多种的组合。在本实施例中定位检测模块89包括激光雷达模块、配合惯导模块和超宽带模块这三种检测模块,以提高位置检测的准确度,为机器人的导航定位提供保证。这里的激光雷达模块还可以起到检测障碍的作用,对于激光雷达模块、惯导模块和超宽带模块的结构以及位置检测过程均为现有技术。
80.在工作时,通过定位检测模块89识别信息后反馈到控制器7进行信息处理,并控制两个伺服轮毂82执行正转、反转、差速转,以进行相应的前进、后退、转弯、掉头的动作。整个移动底盘8通过伺服轮毂82提供动力输出,融合定位检测模块89,实现了消毒机器人的自助移动任务,通过设定好的程序,便可以使得消毒机器人自动移动至目标位置,消毒覆盖效果更好,更加灵活。
81.进一步地,如图10至图12所示,紫外线照射消毒机构3包括紫外灯组件31和升降组件32,紫外灯组件31包括支撑外壳311,支撑外壳311的顶部伸出壳体1的顶部,人体检测模块6设在支撑外壳311的顶部。在支撑外壳311的中部沿其周向间隔设有多个第一紫外灯312,支撑外壳311的底部与升降组件32连接。控制器7与第一紫外灯312和升降组件32电连接,并能驱动升降组件32带动紫外灯组件31上下移动。
82.一般在支撑外壳311的顶部设有第一镇流器313,控制器7通过第一镇流器313驱动第一紫外灯312工作。当人体检测模块6检测周边为无人状态时,控制器7则驱动升降组件32带动紫外灯组件31向上移动,同时驱动第一紫外灯312发光,便可以进行紫外灯照射消毒。当人体检测模块6检测周边为有人状态时,控制器7驱动升降组件32带动紫外灯组件31向下移动,同时控制器7通过控制第一镇流器313关闭使得第一紫外灯312关闭,直至人离开再根据任务重新开启。整个紫外线照射消毒机构3为升降式,能够在第一紫外灯312不工作时将其下降至壳体1内,对第一紫外灯312起到较好的保护作用;在使用时可以将第一紫外灯312升起,以增加照射面积,使用更加灵活。
83.进一步地,为了方便升降组件32带动紫外灯组件31升降,如图12所示,升降组件32包括固定机座321、电机322、传动机构323和滑块324,固定机座321固定在壳体1内,电机322设在固定机座321的底部,滑块324能滑动地套设在固定机座321上,电机322通过传动机构323与滑块324连接,并能驱动滑块324上下滑动。支撑外壳311的底部与滑块324固定连接,控制器7与电机322电连接并能驱动电机322转动。
84.一般在固定机座321上设有驱动器325,控制器7通过驱动器325控制电机322转动,电机322通过传动机构323驱动滑块324的直线运动,进而实现紫外灯组件31的升降动作。
85.具体而言,传动机构323包括主动轮3231、从动轮3232以及连接在主动轮3231和从动轮3232之间的同步带3233,主动轮3231设在固定机座321的底部并与电机322的输出轴固定连接,从动轮3232设在固定机座321的顶部,同步带3233与滑块324固定连接。
86.一般为了便于加工和安装,如图12所示,固定机座321包括固定底板3211以及设在固定底板3211上的导向柱3212,驱动器325安装在固定底板3211的上表面上,电机322固定在固定底板3211的底部,滑块324为环状结构并套设在导向柱3212上。主动轮3231设在固定
底板3211的底部,从动轮3232设在导向柱3212的顶部,在固定底板3211上开设有穿孔,同步带3233穿设在该穿孔中并与主动轮3231和从动轮3232连接。
87.上述的支撑外壳311包括筒状外壳3111、固定在筒状外壳3111顶部的顶板3112以及固定在顶板3112上方的顶罩3113,顶板3112和顶罩3113均伸出壳体1的顶部,上述的人体检测模块6以碰珠方式固定在顶罩3113的侧壁上,本实施例中共设有四个人体检测模块6。多个第一紫外灯312均设在筒状外壳3111的外侧,筒状外壳3111套设在导向柱3212的外侧且筒状外壳3111的下端通过螺丝与滑块324固定连接。上述的第一镇流器313安装在顶板3112上,顶罩3113罩设在第一镇流器313的外侧并与顶板3112固定连接。
88.进一步地,如图13和图14所示,过氧化氢干雾消毒机构4包括雾化组件41和过氧化氢储液箱42,雾化组件41包括雾化水箱411,在雾化水箱411内设有雾化器412,在雾化水箱411的顶面连通有出雾管道413。在雾化水箱411的顶部设有第一隔膜泵414和第二隔膜泵415,第一隔膜泵414的入口端和第二隔膜泵415的出口端分别通过相应的管路与过氧化氢储液箱42连通,第一隔膜泵414的出口端和第二隔膜泵415的入口端均与雾化水箱411的内部连通。控制器7与雾化器412、第一隔膜泵414和第二隔膜泵415电连接。
89.其中,本实施例中在雾化水箱411的顶面共连通有四个出雾管道413。过氧化氢储液箱42内主要用于存储设定浓度的过氧化氢消毒液,当雾化水箱411内的液体过少时,第一隔膜泵414能抽取过氧化氢消毒液至雾化水箱411内,以补充液体;当消毒结束后需要清空雾化水箱411内的剩余液体时,第二隔膜泵415能将雾化水箱411内剩余的液体抽吸到过氧化氢储液箱42内。当人体检测模块6检测周边为无人状态时,控制器7控制雾化器412开始执行雾化。
90.进一步地,如图10所示,过氧化氢干雾消毒机构4还包括用于检测空气浓度的过氧化氢浓度检测模块44,控制器7与过氧化氢浓度检测模块44电连接。其中,过氧化氢浓度检测模块44能与外界空气接触,根据其检测的空气浓度可以方便了解空气中的过氧化氢含量,可以作为判断空气消毒是否达标的参考,过氧化氢浓度检测模块44的具体结构和检测过程为现有技术。
91.由于在过氧化氢干雾消毒机构4工作结束后,雾化水箱411内液体的浓度一般都会有所增加,因此,为了方便调节雾化水箱411内液体的浓度以达到设定浓度,过氧化氢干雾消毒机构4还包括纯水储液箱43和第三隔膜泵416,第三隔膜泵416的入口端通过管路与纯水储液箱43连通,第三隔膜泵416的出口端与雾化水箱411的内部连通,控制器7与第三隔膜泵416电连接。其中,纯水储液箱43主要用于存储纯水,第三隔膜泵416能抽取纯水至雾化水箱411内。雾化时,通过控制器7读取第一隔膜泵414的工作时间,控制雾化结束后第三隔膜泵416向雾化水箱411内泵送一定计算量的纯水,以调节液体的浓度。
92.对于上述雾化器412、第一隔膜泵414、第二隔膜泵415和第三隔膜泵416的具体结构均为现有技术。一般为了便于加工和安装,如图14所示,雾化水箱411包括上下连接的水槽盖4111和雾化水槽4112,雾化水槽4112通过螺丝固定在雾化水槽4112上,雾化器412通过螺丝固定在雾化水槽4112的底部,用于实现液体雾化,出雾管道413设在水槽盖4111上并与雾化水槽4112的内部连通,上述的三个隔膜泵通过螺丝固定在水槽盖4111上。一般在雾化水箱411的顶部还连通有管道风机4131,用于雾化水槽4112内增加气压,外界空气经管道风机4131吸进雾化水槽4112内,之后干雾从出雾管道413喷出,可以提高雾化效果。
93.在实际应用中,由于雾化器412正常雾化工作时对雾化水箱411内的水量有一个最低水位要求和最高水位要求,若水位过低,雾化器412无法正常工作,且这部分水无法被有效利用,若水位过高,雾化器412也无法正常工作。
94.因此,在本实施例中,如图13至图15所示,雾化水箱411的内部形成上下连通的第一腔室4113和第二腔室4114,第一腔室4113的体积大于第二腔室4114的体积。在第二腔室4114内填充有填充块417,在填充块417的底部开设有安装槽4171,在填充块417的顶面开设有多个与安装槽4171连通的第一通孔4172,第一通孔4172的数量与雾化器412的雾化头4121的数量相同(例如本实施例中共设有六个第一通孔4172,且各第一通孔4172与各雾化头4121上下正对设置)。雾化器412嵌设在安装槽4171内并与安装槽4171的槽底之间留有预设间隙。
95.其中,一般填充块417的上表面与第二腔室4114的顶面平齐,最低水位一般和填充块417的上表面平齐或者略高于填充块417的上表面,具体根据实际需要设定。填充块417通过螺丝固定在雾化水槽4112的底部,该填充块417主要用于排挤低位液体,以保证雾化水箱411内的水都能被有效利用。
96.进一步地,为了方便检测雾化水箱411内的水位情况,在雾化水箱411内还设有用于检测第一水位的第一浮球开关418以及用于检测第二水位的第二浮球开关419,第一水位低于第二水位。在填充块417的顶面还设有两个与安装槽4171连通的第二通孔4173,第一浮球开关418和第二浮球开关419的端部分别插设在两个第二通孔4173中。控制器7与第一浮球开关418和第二浮球开关419电连接,并能根据第一浮球开关418或第二浮球开关419的检测结果控制第一隔膜泵414工作。
97.其中,上述的第一水位和第二水位分别为能保证雾化器412正常工作的最低水位和最高水位。第一浮球开关418和第二浮球开关419的顶部均安装在水槽盖4111上,通过浮球形状的磁力感应感知因液体浮力产生的浮球上下偏移位置,通过水位的检测结果控制第一隔膜泵414的执行动作,当第一浮球开关418检测到雾化水槽4112内的水位低于最低水位时,控制器7控制第一隔膜泵414向雾化水槽4112内补充液体,一直加到最高液位为止。具体第一浮球开关418和第二浮球开关419的结构和检测过程为现有技术,在此不再赘述。通过两个浮球开关的检测功能,能够自主实现补充液体的工作,并将液体加到最低液位和最高液位之间,更加方便。
98.进一步地,为了更方便了解各储液箱内的液体量的多少,过氧化氢储液箱42和纯水储液箱43的底部分别设有第一称重感应器和第二称重感应器(在图10中并未示出),控制器7与第一称重感应器和第二称重感应器电连接。
99.第一称重感应器和第二称重感应器主要用于检测各储液箱内剩余液体的量,具体结构为现有技术。当第一称重感应器或者第二称重感应器检测到过氧化氢储液箱42或者纯水储液箱43内的液体少于一定量时,控制器7则根据检测结果控制发出相应的提示信号,例如发出提示音等,以方便提醒操作人员补充液体。
100.进一步地,如图16和图17所示,循环风消毒机构5包括循环风箱51,在循环风箱51内设有多个第二紫外灯52和多个等离子发生器53。在循环风箱51的两端分别作为进风端和出风端,在出风端处设有风扇54,控制器7与第二紫外灯52、等离子发生器53和风扇54电连接。
101.一般在循环风箱51的顶部固定安装有第二镇流器55,为各第二紫外灯52供电,控制器7通过第二镇流器55控制紫外灯工作。对于第二紫外灯52和等离子发生器53的数量根据需要而定,例如本实施例中共设有四个第二紫外灯52和两个等离子发生器53,各第二紫外灯52通过卡扣固定在循环风箱51的内部,各等离子发生器53固定在循环风箱51的侧面。另外,为了起到过滤作用,在进风端和出风端分别设有进风滤网56和出风滤网57。
102.在人体检测模块6检测为有人状态时,循环风消毒机构5开始工作,通过第二紫外灯52和等离子发生器53对空气有害物质进行消毒杀菌后,风扇54通过出风滤网57向外吹风,同时循环风箱51内的空气形成负压使空气从进风滤网56流入到循环风箱51,形成循环。可以产生紫外线循环风和等离子循环风,大大增强了消毒效果。
103.进一步地,为了便于紫外线照射消毒机构3、过氧化氢干雾消毒机构4和循环风消毒机构5在壳体1内的安装,如图3以及图8至图10所示,消毒组件2还包括消毒支架21,消毒支架21的底部固定在移动底盘8上,紫外线照射消毒机构3、过氧化氢干雾消毒机构4和循环风消毒机构5均固定在消毒支架21上。
104.具体是,消毒支架21的底部固定在移动底盘8的底框架81上,升降组件32中固定机座321的固定底板3211通过螺丝固定在消毒支架21的内侧。雾化组件41中的雾化水槽4112通过安装板45固定在消毒支架21上,该安装板45的形状优选采用l形。过氧化氢储液箱42和纯水储液箱43均固定在消毒支架21上,循环风箱51通过螺丝固定在消毒支架21上。上述的过氧化氢浓度检测模块44也固定在消毒支架21上,并在壳体1的相应位置开设通孔,以保证过氧化氢浓度检测模块44与外界空气接触。
105.一般为了使得结构更加紧凑,同时提高消毒效果,过氧化氢干雾消毒机构4包括两套上述的雾化组件41,循环风消毒机构5包括两套循环风箱51,消毒支架21为由多个横杆和多个纵杆连接构成的框架结构,升降组件32插设固定在该框架结构的上部内侧,两套雾化组件41分别对称固定在消毒支架21的上部左右两侧,过氧化氢储液箱42和纯水储液箱43分别固定在消毒支架21的下部前后侧,两套循环风箱51分别对称固定在消毒支架21的下部左右两侧。当然,根据需要各消毒机构也可以按照其他的方式固定在消毒支架21上,本实施例仅为举例说明。
106.另外,为了更方便电路的连接,在消毒支架21的上部前侧还通过螺丝固定有电气控制模组22,紫外线照射消毒机构3、过氧化氢干雾消毒机构4和循环风消毒机构5中相应的检测部件和执行部件均与电气控制模组22电连接,控制器7通过该电气控制模组22分别控制各器件的工作。
107.进一步地,为了更加精准地判断消毒机器人的位置并方便检测周围的障碍物,如图1和图2所示,在壳体1的底部外侧设有多个摄像头11和多个超声波检测模块12,控制器7与摄像头11和超声波检测模块12电连接。
108.这里的摄像头11优选采用单目摄像头,主要用于机器人移动定位检测,一般会在周围环境中贴上二维码标签,摄像头11通过图像识别方式识别各二维码标签来判断机器人的位置信息。超声波检测模块12主要用于机器人移动检测障碍,具体结构为现有技术。另外,在壳体1的底部边缘套设有触边检测胶条13(也为现有技术),控制器7与触边检测胶条13电连接。当触边检测胶条13接触障碍物时,便可以触发消毒机器人急停。通过壳体1上安装的摄像头11、超声波检测模块12以及触边检测胶条13,能够实现辅助消毒机器人的避障、
自主助导航,自主完成任务。
109.进一步地,在壳体1上还设有启动按钮14和急停按钮15,该启动按钮14用于消毒机器人的启动使用,急停按钮15用于消毒机器人的紧急停止使用。以便于操作人员手动进行开启或者急停操作,使用更加安全。
110.进一步地,如图18所示,在壳体1的顶部安装有灯带181,控制器7与灯带181电连接,并能根据消毒机器人的不同运行状态控制灯带181发不同颜色的光。灯带181优选采用led串口灯带181(为现有技术),用于灯光提示当前机器人的运行状态。
111.一般为了便于安装,如图18所示,壳体1包括相互固定的前壳体16、后壳体17、灯罩18和顶壳19,前壳体16为开口朝向后壳体17的u形壳体,后壳体17为长方形板状结构。在前壳体16上对应进风端的位置设有进风孔161,在后壳体17上对应出风端的位置设有出风孔171。对于上述的摄像头11和超声波检测模块12的数量根据需要而定,本实施例中在前壳体16上共设有三个摄像头11和四个超声波检测模块12,具体是在前壳体16的前面底部设有一个摄像头11和两个超声波检测模块12,在前壳体16的左右侧底部均设有一个摄像头11和一个超声波检测模块12。在后壳体17的背面底部设有一个摄像头11和两个超声波检测模块12。
112.上述的触边检测胶条13呈环状,环绕前壳体16和后壳体17的底部固定安装,上述的启动按钮14和急停按钮15均设在前壳体16的前面上部。灯罩18为环状结构,固定在前壳体16和后壳体17的顶部,灯罩18优选采用亚克力件,即采用有机玻璃材质制成,灯带181安装在灯罩18的内侧。顶壳19固定在灯罩18上方,在顶壳19的中心开设有中心孔191,紫外灯组件31中支撑外壳311的顶部穿过该中心孔191并伸出。顶壳19通过螺丝固定安装在消毒支架21的顶部,在顶壳19上还设有干雾出口栅格192,本实施例中在顶壳19的四个斜面上分别设有一干雾出口格栅,使用碰珠固定,干雾出口栅格192通过管路(例如软管)与出雾管道413连通,使干雾从干雾出口栅格192喷出。
113.另外,为了更方便电路的连接,在后壳体17的内侧固定有驱动板172,壳体1上的摄像头11、超声波检测模块12、触边检测胶条13和灯带181均与驱动板172连接,控制器7通过该驱动板172控制各器件的工作。
114.需要说明的是,本实施例中所提到的前后左右方位均是指在使用时消毒机器人行走时的前后左右方位。
115.综上,本实施例中的消毒机器人,通过移动底盘8执行移动任务,并配合壳体1上的各项传感器,达到指定消毒地点后,人体检测模块6对指定区域检测是否有人,无人状态下根据规定路线利用紫外线照射消毒机构3和/或过氧化氢干雾消毒机构4进行空气消毒,有人状态下根据规定路线利用循环风消毒机构5进行空气消毒,任务完成后,执行下一地点的消毒任务或返回站点。整个消毒机器人可自动完成设定区域的空气消毒任务,根据预设的消毒模式到响应的站点执行任务,根据不同的场景选择响应的工作模式,适应有人和无人场景下的空气消毒工作,除了定期对过氧化氢储液箱42和纯水储液箱43补充液体需要人工辅助外,全程无需人工参与,机器人自动完成移动、消毒等工作。
116.以上仅为本实用新型示意性的具体实施方式,并非用以限定本实用新型的范围。任何本领域的技术人员,在不脱离本实用新型的构思和原则的前提下所作出的等同变化与修改,均应属于本实用新型保护的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1