紫外线消毒机器人的制作方法
1.本实用新型涉及一种医疗消毒设备,特别涉及一种紫外线消毒机器人。
背景技术:
2.现今消毒成为医疗机构和单位必不可少的一个工作。消毒可以有效的减少某些疾病的传播,减少感染,特别针对医院病房,人员密集型的区域。其中应用最为广泛的紫外消毒设备,其消毒原理只要依靠紫外线的有效照射,也就是说照射的范围、角度、时间都将成为杀菌效果的关键。
3.而现有的紫外消毒设备,其设备的高度有限,对于高处的消毒不到位。在病房区域中,经常将紫外消毒设备放置在两个病床中间,而往往相邻的病床上还有病人,仅仅用帘子遮挡等很多缺陷。
技术实现要素:
4.本实用新型的提供的一种紫外线消毒机器人,可扩展消毒高度,可以根据需要调节紫外线消毒的高度,并且可以将偏心旋转到需要的位置,消毒位置针对性强;以克服现有技术的缺陷。
5.本实用新型提供一种紫外线消毒机器人,包括:移动底座100、一级紫外灯组件300、升降机构400和二级紫外灯组件600;一级紫外灯组件300的下端与移动底座100连接;一级紫外灯组件300的上端与升降机构400的下端连接;二级紫外灯组件600的下端与升降机构400的上端连接。
6.进一步,本实用新型提供一种紫外线消毒机器人,还可以具有这样的特征:升降机构400为顶升气缸;一级紫外灯组件300的上端与顶升气缸的固定端连接;二级紫外灯组件600的下端与顶升气缸的升降端连接;或者一级紫外灯组件300的上端与顶升气缸的升降端连接;二级紫外灯组件600的下端与顶升气缸的固定端连接。
7.进一步,本实用新型提供一种紫外线消毒机器人,还可以具有这样的特征:升降机构400为伸缩杆。
8.进一步,本实用新型提供一种紫外线消毒机器人,还可以具有这样的特征:还包括偏心旋转机构500;二级紫外灯组件600的下端通过偏心旋转机构500与升降机构400的上端偏心旋转连接。
9.进一步,本实用新型提供一种紫外线消毒机器人,还可以具有这样的特征:偏心旋转机构500包括,偏心座510、第一偏心齿轮520、第二偏心齿轮530和偏心旋转盘540;偏心座510固定在升降机构400上;第一偏心齿轮520与偏心座510可旋转连接;第一偏心齿轮520的旋转中心与偏心座510的中心位置不重合;第二偏心齿轮530与偏心旋转盘540固定连接;第二偏心齿轮530的旋转中心与偏心旋转盘540中心位置不重合;第一偏心齿轮520和第二偏心齿轮530啮合;二级紫外灯组件600的下端与偏心旋转盘540固定连接。
10.进一步,本实用新型提供一种紫外线消毒机器人,还可以具有这样的特征:还包括
旋转机构200;一级紫外灯组件300的下端通过旋转机构与移动底座100旋转连接。
11.进一步,本实用新型提供一种紫外线消毒机器人,还可以具有这样的特征:述旋转机构200包括旋转座210、旋转齿轮220、至少一个旋转过渡轮230、齿圈240和旋转盘250;旋转座210固定在移动底座100上;旋转齿轮220与旋转座210可旋转连接;旋转过渡轮230与旋转座210可旋转连接;齿圈与旋转盘250固定连接;旋转盘250与一级紫外灯组件300的下端固定连接;旋转齿轮220与旋转过渡轮230啮合;齿圈240套在旋转过渡轮230外,并与旋转过渡轮230啮合。
12.进一步,本实用新型提供一种紫外线消毒机器人,还可以具有这样的特征:一级紫外灯组件300和/或二级紫外灯组件600包括下固定座、上固定座、支撑杆和若干个紫外灯;下固定座固定在支撑杆的下端,上固定座固定在支撑杆的上端;下固定座和/或上固定座上具有若干个灯座;紫外灯与灯座一一对应,并电气连接。
13.进一步,本实用新型提供一种紫外线消毒机器人,还可以具有这样的特征:一级紫外灯组件300和/或二级紫外灯组件600还包括若干根防撞杆;防撞杆的两端分别固定在下固定座、上固定座上,且位于紫外灯的外侧。
14.进一步,本实用新型提供一种紫外线消毒机器人,还可以具有这样的特征:还包括把手700;把手700固定在二级紫外灯组件600上端。
附图说明
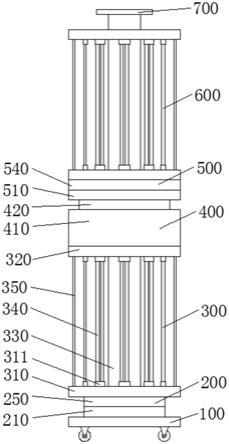
15.图1是实施例中的紫外线消毒机器人的收缩状态结构示意图。
16.图2是实施例中的紫外线消毒机器人的展开后结构示意图。
17.图3是实施例中的旋转机构的截面结构示意图。
18.图4是实施例中的偏心旋转机构的截面结构示意图。
具体实施方式
19.下面结合附图和具体实施例对本实用新型做进一步的描述。
20.实施例
21.图1是实施例中的紫外线消毒机器人的收缩状态结构示意图。
22.如图1所示,本实施例中的紫外线消毒机器人,包括:移动底座100、旋转机构200、一级紫外灯组件300、升降机构400、偏心旋转机构500、二级紫外灯组件600和把手700。
23.本实施例中,移动底座100的底部具有四个旋转轮,实现移动底座带动整个紫外线消毒机器人移动。把手700固定在二级紫外灯组件600的上固定座上,方便操作紫外线消毒机器人。
24.本实施例中,一级紫外灯组件300包括:下固定座310、上固定座320、支撑杆330、8个紫外灯340和防撞杆350。下固定座310采用紧固件固定在支撑杆330的下端,上固定座320采用紧固件固定在支撑杆330的上端。本实施例中,下固定座310上具有8个圆周均布的灯座311;8个紫外灯340与灯座311一一对应,并电气连接。上固定座320上具有辅助固定座,配合固定紫外灯340上端。防撞杆350的两端分别固定在下固定座310、上固定座320上,且位于紫外灯340的外侧,防止移动底座100移动不当时,撞到紫外灯340。
25.本实施例中,二级紫外灯组件600的机构与一级紫外灯组件300的机构一致,也是
由下固定座、上固定座、支撑杆和8个紫外灯、防撞杆构成。当然,根据实际需要二级紫外灯组件的机构可以与一级紫外灯组件300的机构不相同,如紫外灯的数量和排布变化。
26.本实施例中,一级紫外灯组件300的下端通过旋转机构与移动底座100旋转连接。如图3所示,旋转机构200包括:旋转座210、旋转齿轮220、对称设置的两个旋转过渡轮230、齿圈240和旋转盘250。旋转座210固定在移动底座100上。旋转齿轮220与旋转座210通过旋转轴实现可旋转连接。旋转过渡轮230与旋转座210也通过旋转轴实现可旋转连接。齿圈与旋转盘250固定连接。旋转盘250与一级紫外灯组件300的下固定座310固定连接。旋转齿轮220与两个旋转过渡轮230对称啮合。齿圈240套在两个旋转过渡轮230外,并与旋转过渡轮230啮合。
27.手动操作时,直接旋转一级紫外灯组件300的任意一个部件或旋转盘250即可实现一级紫外灯组件300相对于移动底座100进行旋转。当然,旋转机构200可以配置旋转驱动电机,进行电动驱动。旋转驱动电机的输出轴与旋转齿轮220固定连接,驱动旋转齿轮220旋转,带动旋转过渡轮230旋转,带动齿圈240旋转,最终带动旋转盘以及一级紫外灯组件300旋转。
28.本实施例中,升降机构400为顶升气缸。一级紫外灯组件300的上固定座320与顶升气缸的固定端410连接;二级紫外灯组件600的下固定座510与顶升气缸的升降端420连接。当然,顶升气缸也可以倒置,即一级紫外灯组件300的上固定座320与顶升气缸的升降端420连接;二级紫外灯组件600的下固定座510与顶升气缸的固定端410连接。顶升气缸的升降端420升起或降落带动二级紫外灯组件600升起和降落。当然,升降机构400可以采用伸缩杆的结构实现其升降作用。
29.本实施例中,二级紫外灯组件600的下端通过偏心旋转机构500与升降机构400的上端偏心旋转连接。如图4所示,偏心旋转机构500包括,偏心座510、第一偏心齿轮520、第二偏心齿轮530和偏心旋转盘540。偏心座510固定在升降机构400的上端。第一偏心齿轮520与偏心座510通过旋转轴实现可旋转连接;第一偏心齿轮520的旋转中心与偏心座510的中心位置不重合。第二偏心齿轮530与偏心旋转盘540固定连接。第二偏心齿轮530的旋转中心与偏心旋转盘540中心位置不重合。第一偏心齿轮520和第二偏心齿轮530啮合。二级紫外灯组件600的下固定座与偏心旋转盘540固定连接。
30.手动操作时,直接旋转二级紫外灯组件600的任意一个部件或偏心旋转盘540即可实现二级紫外灯组件600相对于一级紫外灯组件300偏心旋转,如图2所示。当然,偏心旋转机构500可以配置偏心旋转驱动电机,进行电动驱动。偏心旋转驱动电机的输出轴与第一偏心齿轮520固定连接,驱动第一偏心齿轮520旋转,带动第二偏心齿轮530旋转,从而带动偏心旋转盘540旋转,最终带动二级紫外灯组件600偏心旋转。
31.需要说明的是本实用新型提供的紫外线消毒机器人可纯人工操作进行消毒,也可以配合远程遥控设备、定时装置等进行自动化消毒。
32.另外,本实用新型采用二段式升降,在二级紫外灯组件600上可以再设置升降机构,并加设三级紫外灯组件,实现无限高度上的增加。
33.尽管已经示出和描述了本实用新型的实施例,对于本领域的普通技术人员而言,可以理解在不脱离本实用新型的原理和精神的情况下可以对这些实施例进行多种变化、修改、替换和变型,本实用新型的范围由所附权利要求及其等同物限定。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1