一种用于紫外消毒的机器人的制作方法
1.本实用新型涉及一种机器人,特别涉及一种用于紫外消毒的机器人。
背景技术:
2.医院感染是全球性的公共卫生问题之一,高危院感科室主要是:icu、手术室、肿瘤病房、产房等,若环境消毒不彻底将造成巨大的社会危害。
3.目前,医院消毒方式主要是化学试剂喷涂,以及悬挂或移动医用紫外灯 (功率不超过60w)消毒。消毒模式主要是人工操作或区域投放,不仅费时费力,而且消毒效果不理想,消毒的时效性难以保证,容易出现耐药细菌。
4.多项研究显示,医院感染病原菌前5位为金黄色葡萄球菌(mrsa)、多重耐药铜绿假单胞菌(mdr
‑
pa)、鲍曼不动杆菌(ab)、肺炎克雷伯菌 (kp)、白色假丝酵母菌(ca)。这些病原菌都可以被对应剂量的深紫外线杀死,毫无例外。目前借助于机器人移动紫外灯技术解决院感问题,是机器人的一个全新的应用领域。
5.现有的用于紫外消毒的机器人大多数存在消毒模式传统、消毒方式单一、自动化程度低,达不到消毒的无害性、无残留物和无二次污染的全方位彻底消毒的要求。并且在消毒过程中,紫外线会加速聚合物、pc板以及纺织品等的老化脆化、性能损坏,局部紫外线剂量难以控制。现有的用于紫外消毒的机器人如美国steris公司pathogon uv消毒系统,其虽然可以根据房间的大小和病原菌污染类型提供预先编程的照射剂量,但其对阴影部分无法有效消毒;美国lumalier公司tru
‑
d uv消毒装置,其虽然可以依据从墙壁、天花板、地板和室内物品反射的uv
‑
c光来计算为病原体或孢子提供程序致死剂量所需的辐射量,但其消毒时间很长,消毒环境受限制;再比如美国 csgi公司iris 3200m紫外灯,其虽然可以自动测量房间的环境条件,如房间大小、温度和湿度等,并且可以根据测量的房间的环境条件,实时确定合适的照射剂量、时间、灯的数量和功率,但其由于底盘的底面面积较大,适应性和安全性较差,并且对于高功率紫外线无法自动控制,容易损伤塑料橡胶等仪器部件。
6.另外,现有的用于紫外消毒的机器人重心高,没有防止倾倒和防止打滑的功能,安全性较差。
技术实现要素:
7.本实用新型的目的是提供一种用于紫外消毒的机器人,以解决现有用于紫外消毒的机器人达不到全方位彻底消毒的要求、紫外线易损伤消毒场所的物品以及适应性和安全性较差的技术问题。
8.本实用新型所采用的技术方案是,一种用于紫外消毒的机器人,其特殊之处在于:
9.包括运动机构、升降机构、紫外灯组以及检测组件;
10.所述运动机构包括同轴设置的两个行走轮;每个所述行走轮包括同轴设置的外轮和内轮,以及设置在外轮和内轮之间的动力组件;所述动力组件可驱动外轮相对于内轮转动或者内轮相对于外轮转动;
11.所述升降机构包括轮毂桥梁、分别设置在轮毂桥梁两端面上的两个卡槽、分别固定设置在两个内轮相对的两内侧面上的且均沿内轮直径方向的两个滑轨、以及两个卡槽驱动组件;所述滑轨与卡槽配合;所述两个卡槽驱动组件分别驱动两个卡槽滑动;
12.所述紫外灯组包括固定在轮毂桥梁中部的紫外灯座、设置在紫外灯座上的紫外灯、与紫外灯对应的灯罩、以及与灯罩对应的灯罩驱动组件;所述灯罩驱动组件用于驱动灯罩绕紫外灯旋转;
13.所述检测组件包括激光雷达和/或机器视觉传感器、红外探测器以及紫外线收集器。
14.进一步地,为了更好的保护紫外灯组的安全,所述外轮直径为紫外灯长度的1.2
‑
1.5倍。这样,在不使用时,紫外灯组不会伸出行走轮直径范围之外。
15.进一步地,所述紫外灯有四个,且四个紫外灯在轮毂桥梁的轴线两侧各对称分布两个;
16.所述灯罩的横截面为抛物线形,且其内侧面镀有紫外反射膜。这样,可以根据消毒需要,调配紫外灯的辐射角度,增加方向辐射强度,减少辐射重叠,有效控制消毒时的辐射剂量。
17.进一步地,所述卡槽驱动组件为直线电机,所述直线电机的定子固定在对应滑轨上,其动子与对应卡槽固定连接;
18.或者,所述卡槽驱动组件为第一伺服电机驱动的链或带传动结构;所述第一伺服电机驱动的链或带传动结构的链轮或带轮分别固定在对应滑轨的两端,其链条或传送带与对应卡槽相连接。
19.进一步地,所述动力组件包括与内轮同轴设置的电磁抓手环、安装在电磁抓手环上且三者沿电磁抓手环圆周方向均布的第二伺服电机和两个电磁抓手模块、通过电磁离合器与第二伺服电机连接的齿轮组、插装或套装在电磁抓手环上且可相对于电磁抓手环转动的飞轮环、以及均匀固定设置在电磁抓手环周向的多个卡爪;
20.所述外轮上设置有内齿圈;所述内轮上设置有外齿圈;
21.所述齿轮组包括第一从动齿轮和第二从动齿轮,且第一从动齿轮与所述内齿圈啮合,第二从动齿轮与所述外齿圈啮合;所述第二伺服电机通过电磁离合器和齿轮组驱动外轮转动或者内轮转动;
22.所述电磁抓手模块包括电磁线圈、电磁抓手和刹车片,通过控制电磁线圈的通电或断电,使电磁抓手环通过电磁抓手模块与内轮的外齿圈齿廓或者外轮的内齿圈齿廓夹持固连;
23.所述卡爪用于对飞轮环的轴向和圆周方向进行限位,并且通过将所述卡爪与电极连接,使飞轮环形成有刷电机的运行模式。这样,不仅可以实现外轮相对于内轮转动或者内轮相对于外轮转动的功能,而且通过调节电磁抓手模块阻力,可以控制两个行走轮的相对转速,具有防倾倒防打滑功能,运动更加平稳。
24.进一步地,为了结构简单,所述动力组件包括与内轮同轴设置且固连的电磁抓手环、安装在电磁抓手环上的第二伺服电机、与第二伺服电机连接的齿轮组;插装或套装在电磁抓手环上且可相对于电磁抓手环转动的飞轮环、以及均匀固定设置在电磁抓手环周向的多个卡爪;所述外轮上设置有内齿圈;所述齿轮组包括第一从动齿轮,且第一从动齿轮与所
述内齿圈啮合;所述第二伺服电机通过齿轮组驱动外轮转动;所述卡爪用于对飞轮环的轴向和圆周方向进行限位,并且通过将所述卡爪与电极连接,使飞轮环形成有刷电机运行模式;
25.或者,所述动力组件包括与外轮同轴设置且固连的电磁抓手环、安装在电磁抓手环上的第二伺服电机、与第二伺服电机连接的齿轮组;插装或套装在电磁抓手环上且可相对于电磁抓手环转动的飞轮环、以及均匀固定设置在电磁抓手环周向的多个卡爪;所述内轮上设置有外齿圈;所述齿轮组包括第二从动齿轮,且第二从动齿轮与所述外齿圈啮合;所述第二伺服电机通过齿轮组驱动内轮转动;所述卡爪用于对飞轮环的轴向和圆周方向进行限位,并且通过将所述卡爪与电极连接,使飞轮环形成有刷电机运行模式。
26.进一步地,所述卡爪为u型结构且u型开口的两侧边长度不等;所述u 型结构两侧边中的短边与电磁抓手环固连,其长边勾住飞轮环端面,对飞轮环的轴向进行限位;
27.所述飞轮环由磁化铸铁材料制作,或者所述飞轮环上设置有线圈。
28.进一步地,为了方便记录内轮、外轮相对于电磁抓手环的转角,所述内轮和外轮上均设置有光电码盘。
29.进一步地,为了在没有市电供给的情况下,该机器人也能正常工作,还包括储能组件;
30.所述储能组件包括设置在紫外灯座上底座的充电插头装置以及安装在内轮上的电池组、整流器以及逆变器;
31.所述内轮以及安装在内轮上的零部件整体的质心位于内轮的回转轴上。
32.进一步地,为了有效散热,并且为了消毒更彻底,在所述紫外灯座上和四个紫外灯的中间均安装有风扇;
33.所述检测组件还包括微生物检测仪、重力感应器以及粉尘检测仪。
34.本实用新型的有益效果是:
35.(1)本实用新型的用于紫外消毒的机器人,首先,其运动机构包括两个行走轮,双轮重心低,其运动平稳、适应性好;其次,内轮不动,外轮相对于内轮转动,可实现机器人在地面的行走和转弯;外轮不动,内轮相对于外轮转动,可带动设置在轮毂桥梁上的紫外灯组在竖直平面内俯仰转动;卡槽沿滑轨滑动,可实现紫外灯组沿行走轮直径方向的伸缩;这样,本实用新型的用于紫外消毒的机器人,有六个消毒自由度,可实现全空间消毒;再者,紫外灯组外侧设置灯罩,可以保护灯管;并且紫外灯组设置在两个行走轮之间,且可沿行走轮径向伸缩,紫外灯组伸出时可以扩大消毒范围,缩回时可以缩进两个行走轮之间,进一步对紫外灯组起到保护作用,安全性好;同时,紫外灯灯罩内侧反射紫外光而且灯罩在灯罩驱动组件的作用下可转动,这样可以根据消毒需要,调整灯罩的转角,进而控制辐射剂量,实现定区域消毒或同步运动消毒,防止扩散消毒,避免对消毒场所物品不必要的损伤;并且,本实用新型的用于紫外消毒的机器人,还包括有检测组件,激光雷达,机器视觉传感器和红外探测器联用,一旦检测到有人或者动物在机器人消毒期间进入消毒区域,或者消毒区域温度过高,可以立马停止消毒、警报等;紫外线收集器用于收集从墙壁、天花板、地板、室内物体的消毒表面的反射光,判断消毒的有效剂量和消毒的安全,保证消毒效果和医疗仪器设备的安全;因此,本实用新型的用于紫外消毒的机器人,解决了现有用于紫外消毒的机器人达不到全方位彻底消毒的要求、紫外线易损伤消毒场所的物品以及适应性和安全性较差的
技术问题。本实用新型的用于紫外消毒的机器人,具备快速消毒,安全消毒,高效消毒,准确消毒和自动消毒功能,为紫外消毒机器人开辟了一个全新的应用领域。
36.(2)本实用新型的用于紫外消毒的机器人,优选地外轮直径为紫外灯长度的1.2
‑
1.5倍;这样,在不使用时,紫外灯组不会伸出行走轮直径范围之外,可以更好的保护紫外灯组的安全。
37.(3)本实用新型的用于紫外消毒的机器人,优选地紫外灯有四个,且四个紫外灯在轮毂桥梁的轴线两侧各对称分布两个;灯罩的横截面为抛物线形,且其内侧面镀有紫外反射膜;这样,可以根据消毒需要,调配紫外灯的辐射角度,增加方向辐射强度,控制辐射重叠,有效调整消毒时的辐射剂量,实现定区域消毒或同步运动消毒,防止过度消毒,避免对消毒场所物品不必要的损伤。
38.(4)本实用新型的用于紫外消毒的机器人,优选地辅助动力组件中包括有两个电磁抓手模块,功能类似于夹刹刹车片。这样,通过调节电磁抓手模块抓住外轮或内轮的齿轮,可以控制两个行走轮的内轮或外轮运动状态,具有防震颤防打滑功能,运动更加平稳。
39.(5)本实用新型的用于紫外消毒的机器人,优选地还包括储能组件,这样,在没有市电供给的情况下,该机器人也能正常工作。
40.(6)本实用新型的用于紫外消毒的机器人,优选地检测组件还包括微生物检测仪,该微生物检测仪可以对消毒效果进行检测,防止一些阴影区,水渍区,粉尘区消毒不到位。微生物检测仪可以和激光雷达联用,绘制消毒区域的毒菌聚集空间底图,有助于医疗工作者判断流病特质。
附图说明
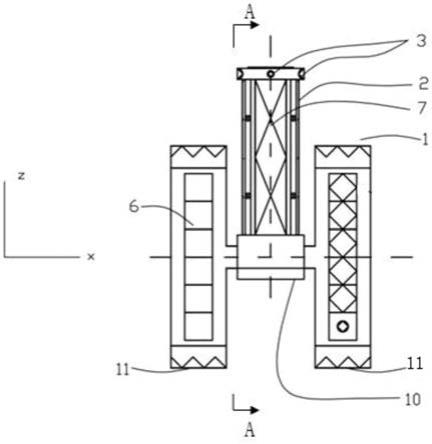
41.图1是本实用新型实施例的主视图;
42.图2是沿图1中a
‑
a线的剖视图;
43.图3是本实用新型实施例中卡槽驱动组件为直线电机时,内轮、外轮、动力组件以及升降机构装配示意图;
44.图4是本实用新型实施例中卡槽驱动组件为第一伺服电机驱动的链或带传动结构时,内轮、外轮、动力组件以及升降机构装配示意图;
45.图5是本实用新型实施例中动力组件的三维结构示意图(第二伺服电机和电磁离合器图上未视图);
46.图6是本实用新型实施例用于紫外消毒的机器人静止状态及四种消毒状态示意图,其中:
47.(a)是静止状态示意图;
48.(b)是高位点消毒状态示意图;
49.(c)是中位点消毒状态示意图;
50.(d)是低位点消毒状态示意图;
51.(e)是超低位点消毒状态示意图;
52.图7是本实用新型实施例中紫外灯组的主视图;
53.图8是图7的左视图;
54.图9是图7的俯视图;
55.图10是图7的仰视图;
56.图11是本实用新型实施例中紫外灯组灯罩配光的四种模式示意图,其中:
57.(f)是安全模式;
58.(g)是启动模式;
59.(h)是定向模式;
60.(i)是扫描模式;
61.图12是本实用新型实施例中检测组件设置位置示意图,其中:
62.(j)是检测组件中的机器视觉系统和微生物检测仪设置位置示意图;
63.(k)是检测组件中的探测装置设置位置示意图;
64.图13是本实用新型实施例中储能组件设置位置示意图;
65.图14是本实用新型实施例中散热组件设置位置示意图。
66.图中各标号的说明如下:
[0067]1‑
运动机构,10
‑
轮毂桥梁,100
‑
卡槽,101
‑
直线电机,102
‑
第一伺服电机驱动的链或带传动结构,11
‑
行走轮,110
‑
动力组件,1101
‑
电磁抓手环, 1103
‑
齿轮组,1104
‑
电磁抓手模块,1105
‑
飞轮环,1106
‑
卡爪,111
‑
外轮,112
‑ꢀ
内轮,1120
‑
滑轨,1121
‑
光电开关,2
‑
紫外灯组,21
‑
紫外灯,22
‑
灯罩,24
‑ꢀ
紫外灯座,25
‑
插口转盘,26
‑
灯罩驱动组件,3
‑
检测组件,31
‑
机器视觉系统, 311
‑
激光雷达,312
‑
机器视觉传感器,32
‑
探测装置,321
‑
红外探测器,322
‑ꢀ
紫外线收集器,323
‑
重力感应器,324
‑
温度湿度传感器,325
‑
粉尘检测仪, 33
‑
微生物检测仪,6
‑
储能组件,61
‑
充电插头装置,62
‑
整流器,63
‑
逆变器, 64
‑
电池组,65
‑
两用开关,66
‑
紫外灯镇流器,7
‑
散热组件,71
‑
紫外灯散热风扇,72
‑
紫外灯座散热风扇,74
‑
热敏传感器。
具体实施方式
[0068]
下面结合附图和具体实施方式对本实用新型进行详细说明。
[0069]
参见图1和图2,建立x轴、y轴和z轴,x轴为横轴,z轴为竖轴,y 轴为纵轴,构成右手空间直角坐标系x
‑
y
‑
z,依据该右手空间直角坐标系对本实用新型一种用于紫外消毒的机器人进行说明。x
‑
y平面对应地面,z轴对应空间高度方向。
[0070]
参见图1和图2,本实用新型一种用于紫外消毒的机器人,包括运动机构1、升降机构、紫外灯组2以及检测组件3。
[0071]
参见图1,上述运动机构1包括同轴设置的两个行走轮11。参见图3和图4,每个行走轮11包括同轴设置的外轮111和内轮112,以及设置在外轮 111和内轮112之间的动力组件110;动力组件110可驱动外轮111相对于内轮112转动或者内轮112相对于外轮111转动。
[0072]
参见图5,本实施例中上述动力组件110优选地包括与内轮112同轴设置的电磁抓手环1101、安装在电磁抓手环1101上且三者沿电磁抓手环1101 圆周方向均布的第二伺服电机和两个电磁抓手模块1104、通过电磁离合器与第二伺服电机连接的齿轮组1103、插装或套装在电磁抓手环1101上且可相对于电磁抓手环1101转动的飞轮环1105、以及均匀固定设置在电磁抓手环 1101周向的多个卡爪1106。外轮111上设置有内齿圈;内轮112上设置有外齿圈;齿轮组1103包括第一从动齿轮和第二从动齿轮,且第一从动齿轮与上述内齿圈啮合,第二从动齿轮与上述外齿圈啮合;第二伺服电机通过电磁离合器和齿轮组1103驱动外
轮111转动或者内轮112转动。上述电磁抓手模块1104包括电磁线圈、电磁抓手和刹车片,通过控制电磁线圈的通电或断电,使电磁抓手环1101通过电磁抓手模块1104与内轮112的外齿圈齿廓或者外轮111的内齿圈齿廓夹持固连;本实施例中,电磁抓手模块1104 采用授权公告号为“cn 207111047 u”,授权公告日为“2018.03.16”,发明名称为“一种用于抓取油管/抽油杆的电磁抓手”中,抓取部件的两侧边缘分别带有导向块的电磁抓手附加刹车片。卡爪1106用于对飞轮环1105的轴向和圆周方向进行限位,并且通过将卡爪1106与电极连接,使飞轮环1105 形成有刷电机的运行模式。本实施例中,卡爪1106为u型结构且u型开口的两侧边长度不等;该u型结构两侧边中的短边与电磁抓手环1101固连,其长边勾住飞轮环1105端面,对飞轮环1105的轴向进行限位;上述飞轮环 1105由磁化铸铁材料制作,或者飞轮环1105上设置有线圈。采用包括两个电磁抓手模块1104的上述动力组件110,其优势在于不仅可以实现外轮111 相对于内轮112转动或者内轮112相对于外轮111转动的功能,而且通过调节电磁抓手模块1104抓住外轮或内轮的齿轮,可以控制两个行走轮11的内轮或外轮运动状态,具有防震颤防打滑功能,运动更加平稳。本实施例优选地在上述内轮112和外轮111上均设置有光电码盘(光电码盘图上未示出)。静止状态时光电码盘的位置向下,其功能是记录内轮112、外轮111相对于电磁抓手环1101的转角,判断机构所处位置以及运动状态。
[0073]
上述动力组件110也可以选用图5所示结构的简易模式,该简易模式有两种具体连接方式:
[0074]
第一种是去掉两个电磁抓手模块1104,齿轮组1103不包含电磁离合器和第二从动齿轮,上述动力组件110包括与内轮112同轴设置且固连的电磁抓手环1101、安装在电磁抓手环1101上的第二伺服电机、与第二伺服电机连接的齿轮组1103;插装或套装在电磁抓手环1101上且可相对于电磁抓手环1101转动的飞轮环1105、以及均匀固定设置在电磁抓手环1101周向的多个卡爪1106;外轮111上设置有内齿圈;齿轮组1103包括第一从动齿轮,且第一从动齿轮与上述内齿圈啮合;第二伺服电机通过齿轮组1103驱动外轮111转动;上述卡爪1106用于对飞轮环1105的轴向和圆周方向进行限位,并且通过将卡爪1106与电极连接,使飞轮环1105形成有刷电机运行模式。
[0075]
第二种是去掉两个电磁抓手模块1104,齿轮组1103不包含电磁离合器和第一从动齿轮,上述动力组件110包括与外轮111同轴设置且固连的电磁抓手环1101、安装在电磁抓手环1101上的第二伺服电机、与第二伺服电机连接的齿轮组1103;插装或套装在电磁抓手环1101上且可相对于电磁抓手环1101转动的飞轮环1105、以及均匀固定设置在电磁抓手环1101周向的多个卡爪1106;内轮112上设置有外齿圈;齿轮组1103包括第二从动齿轮,且第二从动齿轮与外齿圈啮合;第二伺服电机通过齿轮组1103驱动内轮112 转动;卡爪1106用于对飞轮环1105的轴向和圆周方向进行限位,并且通过将卡爪1106与电极连接,使飞轮环1105形成有刷电机运行模式。
[0076]
简易模式时,电磁抓手环1101完全固定在内轮112或外轮111上,齿轮组1103无需变齿,即不需要电磁离合器和第二从动齿轮或者不需要电磁离合器和第一从动齿轮,由第二伺服电机和飞轮环控制内轮和外轮运动。当机器人处于行走状态时,外轮111转动,内轮112相对地面不转动,此时第二伺服电机驱动外轮111转动或者第二伺服电机反作用驱动外轮111转动,飞轮环1105反向转动,平衡扭矩。当机器人处于定向消毒状态时,内轮112 转动,外轮111相对地面不转动,飞轮环1105加倍速度旋转,增加扭矩,其反作用力带动内轮
112反向旋转,由于内轮惯性较大,运动机构容易振颤。尤其是第二种简易模式,震颤非常严重,此时第二伺服电机仅仅作为防止振颤的补充。
[0077]
参见图3和图4,上述升降机构包括轮毂桥梁10、分别设置在轮毂桥梁 10两端面上的两个卡槽100、分别固定设置在两个内轮112相对的两内侧面上的且均沿内轮112直径方向的两个滑轨1120、以及两个卡槽驱动组件;滑轨1120与卡槽100配合;两个卡槽驱动组件分别驱动两个卡槽100滑动。图3是卡槽驱动组件为直线电机时,内轮、外轮、动力组件以及升降机构装配示意图。当卡槽驱动组件为直线电机101时,直线电机101的定子固定在对应滑轨1120上,其动子与对应卡槽100固定连接。图4是卡槽驱动组件为第一伺服电机驱动的链或带传动结构时,内轮、外轮、动力组件以及升降机构装配示意图。当卡槽驱动组件为第一伺服电机驱动的链或带传动结构 102时,第一伺服电机驱动的链或带传动结构102的链轮或带轮分别固定在对应滑轨1120的两端,其链条或传送带与对应卡槽100相连接。本实施例中,上述卡槽100的形状为燕尾形。本实施例中优选地滑轨1120上配备光电开关1121,卡槽滑轨配合实现轮毂桥梁沿滑轨1120方向空间伸缩。光电开关1121用于判断轮毂桥梁的运动位置。通过上述运动机构1和升降机构,紫外灯组2可以照射空间任意部位,并且运动机构1和下述灯罩22双重保护紫外灯21防止磕碰。图6是本实施例用于紫外消毒的机器人静止状态及四种消毒状态示意图,其中:(a)是静止状态示意图;静止状态时,轮毂桥梁10位于最低点,紫外灯组2竖直缩回到运动机构1空间内,灯罩闭合;(b) 是高位点消毒状态示意图;高位点消毒时,轮毂桥梁10转到z轴正向,紫外灯组2竖直伸出运动机构1;(c)是中位点消毒状态示意图;中位点消毒时,轮毂桥梁10转到z轴零向,紫外灯组2水平伸出运动机构1;(d)是低位点消毒状态示意图;轮毂桥梁10转到z轴负向,紫外灯组2斜向下伸出运动机构1;(e)是超低位点消毒状态示意图;轮毂桥梁10转到z轴正向,紫外灯组2斜向上缩回到运动机构1空间内。其中超低位点消毒时,控制灯罩,减弱两个行走轮11上的紫外光照射,实现前后方区域消毒。
[0078]
参见图1、图7、图8、图9以及图10,紫外灯组2包括固定在轮毂桥梁10中部的紫外灯座24、设置在紫外灯座24上的紫外灯21、与紫外灯21 对应的灯罩22、以及与灯罩22对应的灯罩驱动组件26;灯罩驱动组件26 用于驱动灯罩22绕紫外灯21旋转。本实施例中,优选地灯罩22通过插口转盘25一起安装在紫外灯座24上,由灯罩驱动组件26驱动,本实施例的灯罩驱动组件26为灯罩伺服电机。紫外灯21和灯罩22配合,可有效调配紫外线的空间分布,节约能源,防止过度辐射。为了更好的保护紫外灯组2 的安全,在不使用时,紫外灯组2不会伸出行走轮11直径范围之外,优选外轮111直径为紫外灯21长度的1.2
‑
1.5倍。本实施例中,优选地上述紫外灯21有四个,且四个紫外灯21在轮毂桥梁10的轴线两侧各对称分布两个;灯罩22的横截面为抛物线形,且其内侧面镀有紫外反射膜。这样,可以根据消毒需要,调配紫外灯21的辐射角度,增加方向辐射强度,控制辐射重叠,有效调整消毒时的辐射剂量。本实施例中,紫外灯21为高功率紫外线紫外灯。本实施例的灯罩22优选金属材料,可以对紫外灯21配光,优选小角度反射效果,将紫外灯21的360
°
圆周辐射调配为90
°
以下,灯罩伺服电机的摆动角度为
±
180
°
,发光转动角度为
±
90
°
。灯罩伺服电机配备角度反馈,在灯罩伺服电机无效转动角度区间,紫外灯21不点亮。图11是紫外灯组灯罩配光的四种模式示意图,其中:(f)是安全模式,(g)是启动模式,(h) 是定向模式,(i)是扫描模式。安全模式时,灯罩的光轴全都指向中心,保护紫外灯。启动模式时,灯罩的光轴全都指向外侧,此时电机的反馈
信号触发紫外灯开关,紫外灯可能点亮,紫外线辐射布满整个消毒空间。定向模式时,其中一个紫外灯熄灭,另外三个紫外灯的辐射指向同一方向,辐射剂量很大,可对特定区域强力消毒。扫描模式时,属于定向模式的特殊情况,灯罩扫描转动,主要针对狭小缝隙扫描消毒。消毒时,可以根据消毒空间的布局调整灯罩22转角,适应边角缝隙以及孔洞管槽消毒。
[0079]
参见图12中的图(j)和图(k),本实施例中,上述检测组件3包括机器视觉系统31,探测装置32,微生物检测仪33。机器视觉系统31包括激光雷达 311和/或机器视觉传感器312。两个激光雷达311安装在紫外灯座24的上底座和下底座前后方向,用于测试机器人和物体的距离。机器视觉传感器312有两个,分别安装在紫外灯座24的上底座右侧向和上底座前向,配合激光雷达 311用于同时查看机器人周围环境。当轮毂桥梁10旋转时,两个机器视觉传感器312自动矫正视觉角度。探测装置32包括红外探测器321、紫外线收集器 322、重力感应器323、温度湿度传感器324和粉尘检测仪325。红外探测器321 有两个,分别安装在紫外灯座24的上底座后向和紫外灯座24的下底座前向。紫外线收集器322安装在紫外灯座24的上底座左侧面,朝向轮子直线移动的方向y轴,紫外线收集器322与机器视觉系统31联用,用于收集消毒空间反射回的紫外线剂量,判断消毒效力和消毒安全性。重力感应器323安装在轮毂桥梁10的轴线上,用于判断两个行走轮11的倾斜角度,防止侧面倾倒。温度湿度传感器324和粉尘检测仪325安装在运动机构1上,用于检测消毒空间的温度湿度和粉尘浓度,修正消毒剂量。微生物检测仪33选用快速微生物检测仪,安装在轮毂桥梁10上。该微生物检测仪可以对消毒效果进行检测,防止一些阴影区,水渍区,粉尘区消毒不到位。微生物检测仪可以和激光雷达联用,绘制消毒区域的毒菌聚集空间底图,有助于医疗工作者判断流病特质。
[0080]
参见图13,本实施例的用于紫外消毒的机器人,优选地还包括储能组件 6;储能组件6包括充电插头装置61,整流器62,逆变器63,电池组64,两用开关65和紫外灯镇流器66。充电插头装置61安装在紫外灯座24的上底座,采用电磁吸盘,自动抓取并对接充电插座。整流器62,逆变器63,电池组64,两用开关65都安装在两个行走轮11中左轮的内轮112上。整流器62与充电插头装置61连接,将交流电输入变成直流电存储于电池组64 中;充电插头装置61,整流器62和电池组64组成充电系统。逆变器63与电池组64连接,将电池组64输出的直流电变为民用交流电。逆变器63与电池组64连接组成放电系统。两用开关65可以切换外接电源模式和电池模式,两用开关65与逆变器63和整流器62连接。当两用开关65切换电池模式时,逆变器63的电能输入紫外灯镇流器66。当两用开关65切换外接电源模式时,外接电能进入紫外灯镇流器66,同时外接电能进入整流器62和电池组64,给电池充电。紫外灯镇流器66与紫外灯21相连,为紫外灯21提供所需电能。内轮112以及安装在内轮112上的零部件整体的质心位于内轮 112的回转轴上。
[0081]
参见图14,本实施例的用于紫外消毒的机器人,优选地还包括散热组件 7。散热组件7包括紫外灯散热风扇71,紫外灯座散热风扇72和热敏传感器74。发热区域主要是紫外灯以及紫外灯座,紫外灯过热会影响紫外灯的性能和安全,因此在四个紫外灯21中间设置紫外灯散热风扇71,使用一个涡旋风扇,为紫外灯散热,并减少紫外灯产生静电导致落灰问题。紫外灯座散热风扇72使用大排量风扇。
[0082]
本实施例的用于紫外消毒的机器人,通过其运动机构1和升降机构可完成空间全方位运动,有六个消毒自由度,可实现全空间消毒。具体为:其外轮111相对于地面滚动,完
成x
‑
y平面内移动和z轴转动,两个行走轮11中的外轮111同步运动可实现机构直线运动,外轮111不同步可实现机构转弯和斜面移动,进而实现机器人直行或转弯,防止打滑和倾倒,具备其他消毒机器人不具备的坡道移动和坡道转弯,实现对医院无障碍楼梯的消毒;同时,内轮112与轮毂桥梁10配合,完成x轴或y轴转动;再者,轮毂桥梁10完成空间伸缩即z轴移动。本实施例的用于紫外消毒的机器人,其消毒功能由轮毂桥梁10、紫外灯组2、运动机构1和升降机构共同完成;其具备其他消毒机器人不具备的空间自由消毒,实现对医院床柜和仪器设备覆盖消毒,可以实现全方位空间消毒,也可以实现定向定区域消毒,尤其是完成现有消毒装置无法完成的格架窗栏部位消毒,以及死角消毒和缝隙消毒;本实施例的用于紫外消毒的机器人,其安全防护功能由自身结构和检测组件3共同完成,可以保证工作过程中消毒安全以及物品和人员安全。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1