适用于光声成像系统的超声阵元复用装置的制作方法
1.本实用新型属于光声成像技术领域,更具体地,涉及一种适用于光声成像系统的超声阵元复用装置。
背景技术:
2.光声成像是一种基于光声效应建立的一种成像方法。一般来说,在光声成像中需要用脉冲激光照射成像部位。一部分被吸收的光能将会被转化为热能,使附近的组织发生热弹性膨胀,从而形成宽带(兆赫兹级)的超声波发射。这一超声波可以用超声换能器检测,而超声换能器正是一般超声造影中所用的主要探测器。
3.要在一个比较大的面积内获得清晰的光声影像,超声换能器中的阵元数量必须足够高。理想情况下,超声换能器阵列的阵元间距应为超声波长的一半。比如一台3mhz的设备,声速按1500m/s,那么相邻的超声阵元就需要0.5mm 的间距,若超声换能器阵列的周长为660mm,那么就一共需要1320个超声阵元。对于分辨率要求更高的成像系统,要选择更短波长的超声波,因此需要的阵元数也将更多。超声阵元数量的增加将大大提高超声换能器阵列的制作难度和成本。
技术实现要素:
4.针对现有技术的至少一个缺陷或改进需求,本实用新型提供了一种适用于光声成像系统的超声阵元复用装置,其目的在于解决高成像分辨率需要更多的阵元数量以及更大的超声阵列体积的问题。
5.为实现上述目的,按照本实用新型的一个方面,提供了一种适用于光声成像系统的超声阵元复用装置,包括超声换能器阵列、离轴偏心轮和驱动电机;
6.所述驱动电机与离轴偏心轮的轴承相连,通过所述轴承驱动离轴偏心轮旋转;所述离轴偏心轮通过枢轴连接超声换能器阵列,驱动电机的连续旋转运动通过离轴偏心轮的振荡转换成所述超声换能器阵列的往复旋转运动;
7.该超声换能器阵列在由激光脉冲的重复率定义的相同时间间隔下以相等的角度旋转,且其内置的待测物在超声换能器阵列的单个往复旋转运动周期中接收m个激光脉冲,实现超声换能器阵列的阵元的n倍复用;其中,当n=2时, m=2;当n>2时,m=2n。
8.优选的,上述超声阵元复用装置,当n=2或3时,所述驱动电机以恒定的转速旋转以带动超声换能器阵列进行往复旋转运动。
9.优选的,上述超声阵元复用装置,当n=4或5时,所述驱动电机在每个四分之一旋转周期内以恒定的加速度旋转以带动超声换能器阵列进行往复旋转运动。其中,在驱动电机的单个旋转周期中,第一个四分之一周期与第三个四分之一周期具有相同的速度和加速度值,第二个四分之一周期与第四个四分之一周期具有相同的速度和加速度值,且第二个四分之一周期的加速度值为第一个四分之一周期对应的加速度值的相反数。
10.优选的,上述超声阵元复用装置,当n>5时,所述驱动电机在每个旋转四分之一周
期内以变化的加速度旋转以带动超声换能器阵列进行往复旋转运动;其中,在驱动电机的单个旋转周期中,第一个四分之一周期与第三个四分之一周期具有相同的速度和加速度值,第二个四分之一周期与第四个四分之一周期具有相同的速度和加速度值,且第二个四分之一周期的加速度值为第一个四分之一周期对应的加速度值的相反数。
11.优选的,上述超声阵元复用装置,所述枢轴采用框架弹簧。
12.优选的,上述超声阵元复用装置还包括支撑轴承,超声换能器阵列安装在所述支撑轴承上,该支撑轴承用来支持超声换能器阵列的轴向旋转运动。
13.优选的,上述超声阵元复用装置,所述驱动电机采用步进电机或伺服电机。
14.总体而言,通过本实用新型所构思的以上技术方案与现有技术相比,能够取得下列有益效果:
15.本实用新型提供的适用于光声成像系统的超声阵元复用装置,驱动电机通过离轴偏心轮驱动超声换能器阵列旋转,驱动电机的连续旋转运动通过离轴偏心轮的振荡转换成超声换能器阵列的往复旋转运动;在超声换能器阵列的单个往复旋转运动周期中对超声换能器阵列内部的待测物施加多个激光脉冲,且该超声换能器阵列在由激光脉冲的重复率定义的相同时间间隔下以相等的角度旋转,实现超声换能器阵列的阵元的多倍复用,在不增加阵元数量和超声阵列体积的情况下,有效提高了光声成像的分辨率和清晰度。
附图说明
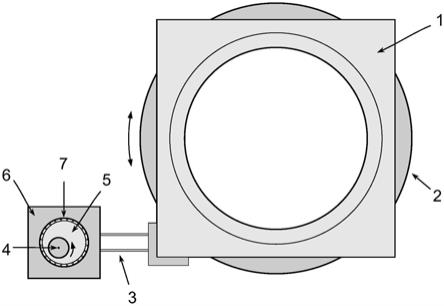
16.图1是本实用新型实施例提供的超声阵元复用装置的组成结构示意图;
17.图2a~图2c是本实用新型实施例提供的超声换能器阵列的旋转位置示意图;其中,图2a表示处于静止状态的超声换能器阵列的初始位置示意图,图2b表示进行2分度旋转的超声换能器阵列的位置示意图,图2c表示进行3分度旋转的超声换能器阵列的位置示意图;
18.图3是本实用新型实施例提供的超声换能器阵列的拉伸距离及其映射在正弦函数图像上的分布示意图;
19.在所有附图中,同样的附图标记表示相同的技术特征,具体为:1
‑
超声换能器阵列;2
‑
支撑轴承;3
‑
枢轴;4
‑
电机旋转中心;5
‑
离轴偏心轮;6
‑
偏心轮支架;7
‑
轴承。
具体实施方式
20.为了使本实用新型的目的、技术方案及优点更加清楚明白,以下结合附图及实施例,对本实用新型进行进一步详细说明。应当理解,此处所描述的具体实施例仅仅用以解释本实用新型,并不用于限定本实用新型。此外,下面所描述的本实用新型各个实施方式中所涉及到的技术特征只要彼此之间未构成冲突就可以相互组合。
21.图1是本实施例提供的适用于光声成像系统的超声阵元复用装置的组成结构示意图,参见图1,该超声阵元复用装置包括超声换能器阵列1、离轴偏心轮5和驱动电机(图中未显示);
22.其中,驱动电机与离轴偏心轮5的轴承7相连,通过轴承7驱动离轴偏心轮5旋转;离轴偏心轮5通过枢轴3连接超声换能器阵列1,驱动电机的连续旋转运动通过离轴偏心轮5的振荡转换成超声换能器阵列1的往复旋转运动;
23.请继续参阅图1,在实际应用时,超声换能器阵列1一般安装在支撑轴承 2上,在支撑轴承2的支持下超声换能器阵列1实现轴向旋转运动。该支撑轴承2可以是球轴承或滚子轴承,可以旋转一整周的轴承或者在一个角度做往复运动的轴承均可,本实施例不做具体限制。超声换能器阵列1的旋转摇摆运动通过与之相连接的离轴偏心轮5的旋转运动产生,离轴偏心轮5安装在偏心轮支架6上,通过枢轴3直接或间接地与超声换能器阵列1连接,在一个具体的示例中,枢轴3是由加固的框架弹簧制成的矩形框架。离轴偏心轮5可以用步进电机或伺服电机进行驱动,通过上述结构,驱动电机的连续旋转运动就可以通过离轴偏心轮5的振荡转换成了超声换能器阵列1的来回摇摆运动。
24.驱动电机驱动离轴偏心轮5每旋转一圈,离轴偏心轮5的轴心(图1中的电机旋转中心4)先后靠近、远离超声换能器阵列1,使超声换能器阵列1完成一个往复旋转运动,在该超声换能器阵列1的单个往复旋转运动周期中,通过激光发生器对超声换能器阵1内部的待测物施加m个激光脉冲,该超声换能器阵列1在由激光脉冲的重复率定义的相同时间间隔(即两个激光脉冲之间的发射时间间隔)下以相等的角度旋转,实现超声换能器阵列1的阵元的n倍复用;其中,当n=2时,m=2;当n>2时,m=2n。
25.图2a~2c是本实施例提供的超声换能器阵列的旋转过程示意图,其中,图 2a为处于静止状态的超声换能器阵列,该超声换能器阵列中包括多个等间距排列的阵元,控制该超声换能器阵列旋转到阵元间距的2等分位置,如图2b所示, n=2,记为2分度旋转;对旋转之前以及2分度旋转的超声换能器阵列分别施加一个激光脉冲,在不增加阵元个数的前提下,实现超声换能器阵列的阵元的2 倍复用;如图2c,控制该超声换能器阵列进行3分度旋转,n=3,对旋转之前以及3分度旋转的超声换能器阵列分别施加一个激光脉冲,在不增加阵元个数的前提下,可实现超声换能器阵列的阵元的3倍复用。
26.本实用新型采取旋转超声换能器阵列到阵元间距内多个分度位置的方式,在不增加超声阵元实体的情况下,使超声换能器阵列的阵元复用,达到超声阵元数量翻n倍的效果。
27.在实际应用过程中,超声换能器阵列的旋转运动应满足以下几个条件:
28.1.位置准确;
29.2.超声换能器阵列必须在由激光脉冲重复率定义的相同时间间隔下以相等的角度旋转。
30.3.受超声换能器阵列连接线缆长度的限制,旋转角度不能过高。
31.4.由于系统的惯性高,需要保持驱动电机在一个方向上旋转,并尽可能保持最小加速度。
32.超声换能器阵列的旋转角度α正比于驱动电机的旋转角度θ的正弦值,即α=k
·
sinθ,对于固定的系统来说,k为常数,且在下面的分度讨论中不发生变化。
33.图3是本实施例提供的超声换能器阵列的拉伸距离及其映射在正弦函数图像上的分布示意图,参见图3,图中上部分表示超声换能器阵列在往复旋转过程对应的拉伸距离,图中的黑色圆点表示激光脉冲的发射时刻,下部分表示激光脉冲在往复旋转过程对应的正弦函数图像上的分布。
34.本实施例指定垂直于超声换能器阵列圆周的轴位置的偏心距为0。当旋转分度n为2或3时,驱动电机以恒定转速旋转即可满足超声换能器阵列在恒定时间间隔内的旋转角度
也保持恒定的条件。
35.请参阅图3,对于2分度,驱动电机每两个激光脉冲旋转一圈,在离轴偏心轮旋转至两个极端偏心位置(朝向超声换能器阵列和背向超声换能器阵列) 时施加激光脉冲,激光脉冲的发射时刻对应的旋转角度为:θ=π/2和θ=3π/2。
36.对于3分度的情况,驱动电机每六个激光脉冲旋转一圈,激光脉冲发射对应的旋转角度分别为:θ=0,θ=π/3,θ=2π/3,θ=π,θ=4π/3和θ=5π/3。
37.对于更高的旋转分度数n,匀速运动的驱动电机不能满足条件,因此驱动电机的速度在旋转过程中必须变化。对于4和5分度,可以通过对驱动电机施加恒定的加速度,使驱动电机在每个旋转四分之一周期内以恒定的加速度旋转以带动超声换能器阵列进行往复旋转运动,这将使驱动电机的负载减至最小。在驱动电机的单个旋转周期中,第一个四分之一周期与第三个四分之一周期具有相同的速度和加速度值,第二个四分之一周期与第四个四分之一周期具有相同的速度和加速度值,且第二个四分之一周期的加速度值为第一个四分之一周期对应的加速度值的相反数。
38.请继续参阅图3,当旋转分度n=4时,驱动电机的恒定的加速度的计算方式如下:
39.在驱动电机旋转的第一个四分之一周期中,若令θ1=0(无激光脉冲),超声换能器阵列还需要2个有相同间隔的旋转位置,记为θ2、θ3;
40.将驱动电机的旋转角度换算为超声换能器阵列的旋转角度,得到下式:
[0041][0042]
超声换能器阵列的每个旋转位置对应的时刻:
[0043][0044]
相邻两个激光脉冲的时间间隔t=δt/2,t为已知数,因此可以求取δt;
[0045]
第一个四分之一周期的加速度a1和速度v1由接近θ=π/2时的条件(19)和(20) 定义:
[0046][0047]
3sinθ2=sinθ3ꢀꢀ
(20)
[0048]
联合求解式(19),(20),可以得到θ2,θ3,v1,a1;即在驱动电机旋转的第一个四分之一周期,其加速度为a1;则在驱动电机旋转的第三个四分之一周期,加速度同第一个四分之一周期,为恒定值a1;在驱动电机旋转的第二个四分之一周期、第四个四分之一周期中,其加速度均为恒定值
‑
a1。
[0049]
当旋转分度n=5时,驱动电机的的加速度的计算方式如下:
[0050]
在驱动电机旋转的第一个四分之一周期中,若令θ1=0(有激光脉冲),超声换能器阵列还需要2个有相同间隔的旋转位置,记为θ2、θ3;
[0051]
将驱动电机的旋转角度换算为超声换能器阵列的旋转角度,得到下式:
[0052][0053]
其中,k为常数;
[0054]
每个所述旋转位置对应的时刻:
[0055][0056]
一个旋转周期的总时间:
[0057]
相邻两个激光脉冲的时间间隔t=2δt/5,t为已知数,因此可以求取δt;
[0058]
第一个四分之一周期的的加速度a1和速度v1由接近θ=π/2时的条件(23)和 (24)定义:
[0059][0060]
2sinθ2=sinθ3ꢀꢀ
(24)
[0061]
联合求解式(23),(24),得到θ2,θ3,v1,a1;在驱动电机旋转的第一个、第三个四分之一周期,其加速度为a1;在驱动电机旋转的第二个、第四个四分之一周期中,其加速度均为
‑
a1。
[0062]
对于再高的分度数,驱动电机在在每个旋转四分之一周期内的加速度也要变化。当旋转分度n>5时,驱动电机在每个旋转四分之一周期内以变化的加速度旋转以带动超声换能器阵列进行往复旋转运动;在驱动电机的单个旋转周期中,第一个四分之一周期与第三个四分之一周期具有相同的速度和加速度值,第二个四分之一周期与第四个四分之一周期具有相同的速度和加速度值,且第二个四分之一周期的加速度值为第一个四分之一周期对应的加速度值的相反数。
[0063]
请继续参阅图3,下面分别讨论n为偶数、奇数的情况:
[0064]
当n为偶数时,在驱动电机旋转的第一个四分之一周期中,也就是θ从0 到π/2这部分,若令θ1=0,超声换能器阵列还需要n/2个有相同间隔的旋转位置(角度),记为θ
t
,其中t∈(2,
…
,n/2+1),相邻的旋转位置间隔的时间相等,为2δt/n。为了保持对称性,θ1=0和θ2之间的时间间隔应等于δt/n,同样对称地,θ
n/2+1
和θ
n/2+2
=π/2之间的时间间隔也应该等于δt/n。
[0065]
将驱动电机的旋转角度换算为超声换能器阵列的旋转角度,得到下式:
[0066][0067]
每个旋转位置对应的时刻:
[0068][0069]
相邻两个激光脉冲的时间间隔t=2δt/n;
[0070]
区间[θ
i
,θ
i+1
]中的加速度a
i
和速度v
i
由接近θ=π/2时的条件(27)和(28)定义:
[0071][0072][0073]
联合求解式(27),(28),得到
[0074]
其它θ
i
根据式(25)求解得到,其他区间的加速度和速度通过递推到i=1的方法得到,即:
[0075][0076]
直到
[0077][0078]
至此,可以分别求出驱动电机旋转的第一个四分之一周期中相邻的两个旋转位置之间的速度和加速度值。
[0079]
当n为奇数时,在驱动电机旋转的第一个四分之一周期中,若令θ1=0,超声换能器阵列还需要(n
‑
1)/2个有相同间隔的旋转位置,记为θ
t
,其中t∈(2,
…
, (n+1)/2);
[0080]
将驱动电机的旋转角度换算为超声换能器阵列的旋转角度,得到下式:
[0081][0082]
每个旋转位置对应的时间:
[0083][0084]
区间[θ
i
,θ
i+1
]中的加速度a
i
和速度v
i
由接近θ=π/2时的条件(33)和(34)定义:
[0085]
[0086][0087]
联合求解式(33),(34),得到
[0088]
其它θ
i
根据式(31)求解得到,其他区间的加速度和速度通过递推到i=1的方法得到,即:
[0089][0090][0091]
至此,可以分别求出驱动电机旋转的第一个四分之一周期中相邻的两个旋转位置之间的速度和加速度值。
[0092]
由于激光脉冲的时间间隔t已知,可以确定δt,进而根据上述方程计算驱动电机的速度和加速度的绝对值。
[0093]
当驱动电机选用伺服电机时,定义伺服电机的原始位置为θ=0,由以上公式计算出的速度和加速度函数所定义的电机的旋转角度θ(t)来计算伺服电机的位置曲线。
[0094]
当驱动电机选用步进电机时,步进电机可以根据旋转角度θ(t)的反函数,即t(θ),来提供步进脉冲。
[0095]
本领域的技术人员容易理解,以上所述仅为本实用新型的较佳实施例而已,并不用以限制本实用新型,凡在本实用新型的精神和原则之内所作的任何修改、等同替换和改进等,均应包含在本实用新型的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1