一种基于电控的房间隔分流器的输送装置的制作方法
1.本实用新型属于医疗器械技术领域,具体涉及一种基于电控的房间隔分流器的输送装置。
背景技术:
2.心力衰竭(hf)是各种心脏结构或功能性疾病导致心室充盈及(或)射血能力受损而引起的一组综合征,其主要为心肌的舒缩功能不全导致心脏泵血功能障碍。
3.目前大部分心力衰竭都是以左心衰竭开始的,即首先表现为肺循环淤血,针对左心房持续高压导致的慢性心力衰竭,通常的解决措施是在左心房与右心房之间的房间隔植入分流装置,重新分配心房血量并减小房间压力不平衡。现有技术中,分流器支架压缩后通过输送装置输送到人体内,由于人体的生理机构复杂,输送器导管通常无法与个体化的生理解剖结构相适应,导致输送器定位困难,释放不精准。
4.在输送器的植入过程中,一旦发现定位偏差等问题,输送装置的调节往往非常困难,而且对医生的操作要求极高,输送精度无法得到保证,各种额外操作会延长患者暴露在x射线下的时间,不利于患者健康。为此,有必要对其进行改进,以克服实际应用中的不足。
技术实现要素:
5.基于现有技术中存在的上述缺点和不足,本实用新型的目的之一是至少解决现有技术中存在的上述问题之一或多个,换言之,本实用新型的目的之一是提供满足前述需求之一或多个的一种基于电控的房间隔分流器的输送装置。
6.为了达到上述实用新型目的,本实用新型采用以下技术方案:
7.一种基于电控的房间隔分流器的输送装置,包括内芯管组件、内鞘管、外鞘管、电控组件和手柄,电控组件安装于手柄内,外鞘管与手柄连接,内芯管组件近端和内鞘管近端分别与电控组件连接,内芯管组件滑动配合于内鞘管,内鞘管滑动配合于外鞘管;通过控制电控组件用以调节内芯管组件和内鞘管的前后进给,通过手柄用以调节外鞘管的弯度,从而实现将分流器输送至房间隔造口中。
8.作为优选方案,所述内芯管组件包括内芯管、引导头和固定头,引导头固定于内芯管的远端,内芯管上套设有固定头,引导头与固定头之间安装分流器。
9.作为优选方案,所述固定头沿周向均匀设于数个定位槽,定位槽与分流器的固定耳相耦合。
10.作为优选方案,所述内鞘管套设于内芯管组件上,内鞘管包括内鞘管本体和收纳管,内鞘管本体与收纳管通过热塑成型一体连接,收纳管的孔径大于内鞘管本体的孔径。
11.作为优选方案,所述收纳管的端部安装显影环。
12.作为优选方案,所述外鞘管套设于内鞘管上,外鞘管包括内管、卡箍、加强管、外管和牵引丝,卡箍和加强管套设于内管上,牵引丝的一端固定于卡箍,另一端从外管近端延伸并游离于外管。
13.作为优选方案,所述手柄包括外鞘管调节段、内鞘管调节段和内芯管调节段,外鞘管调节段、内鞘管调节段和内芯管调节段同轴设置且相互连通。
14.作为优选方案,所述外鞘管调节段包括第一外壳、调弯旋钮、调弯滑块和外鞘管固定座,外鞘管固定座上设有导轨,调弯滑块滑动配合于导轨,调弯旋钮套设于调弯滑块上,并与第一外壳转动连接。
15.作为优选方案,所述电控组件括内芯管电机、内鞘管电机和电池,内芯管电机和内鞘管电机分别与电池电连接,内芯管电机安装于内芯管调节段,内鞘管电机安装于内鞘管调节段。
16.作为优选方案,所述内鞘管调节段与内鞘管近端相连,通过内鞘管电机以控制内鞘管的伸缩。
17.作为优选方案,所述内鞘管调节段包括内鞘管滑块座、内鞘管滑块、内鞘管滑块套筒、内鞘管调节旋钮以及内芯管齿轮,内鞘管滑块套设于内鞘管滑块座上,内鞘管滑块与内鞘管滑块套筒螺接,内鞘管滑块套筒与内鞘管调节旋钮螺接,内鞘管电机通过内鞘管齿轮与内鞘管套筒转动配合;通过控制内鞘管电机和/或转动内鞘管调节旋钮,以调节内鞘管滑块沿轴向滑动。
18.作为优选方案,所述内芯管调节段与内芯管近端相连,通过内芯管电机以控制内芯管的伸缩。
19.作为优选方案,所述内芯管调节段包括内芯管滑块、内芯管滑块座、内芯管调节旋钮以及内芯管齿轮,内芯管滑块滑动配合内芯管滑块座,内芯管调节旋钮安装于内芯管滑块座,内芯管电机通过内芯管齿轮与内芯管滑块座转动配合;通过控制内芯管电机和/或转动内芯管调节旋钮,以调节内芯管滑块沿轴向滑动。
20.作为优选方案,所述内鞘管滑块和内芯管滑块的滑动行程大于分流器被压缩的长度。
21.作为优选方案,所述手柄上安装数个按钮。
22.本实用新型与现有技术相比,有益效果是:
23.本实用新型通过电控组件能够实现自动调节,以提高定位精度,同时兼顾手动微调节,以实现精确定位。
24.本实用新型的输送装置可以实现与个体化的生理解剖结构相适应,释放精准,操作便捷。
25.本实用新型中分流器在植入过程中,当出现定位偏差时,可以随时调节输送装置,以调整输送位置,定位准确。
附图说明
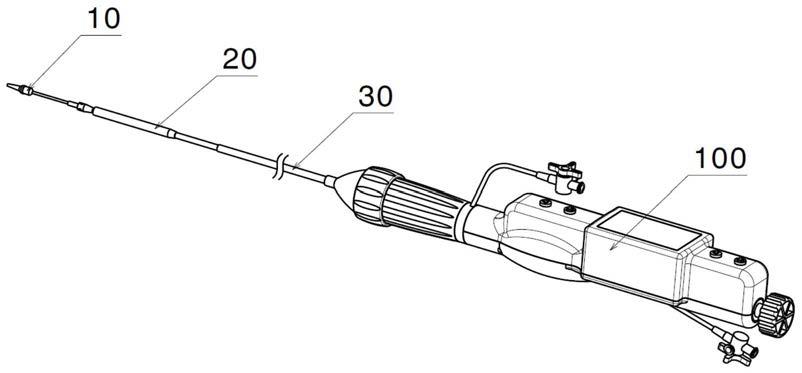
26.图1是本实用新型实施例一的输送装置的结构示意图;
27.图2是本实用新型实施例一的内芯管组件结构示意图;
28.图3是本实用新型实施例一的内鞘管结构示意图;
29.图4是本实用新型实施例一的外鞘管的管体结构示意图;
30.图5是本实用新型实施例一的外鞘管的弯曲形态示意图;
31.图6是本实用新型实施例一的手柄结构示意图;
32.图7是本实用新型实施例一的手柄的外鞘管调节段局部示意图;
33.图8是本实用新型实施例一的外鞘管固定座示意图;
34.图9是本实用新型实施例一的外鞘管固定座剖视图;
35.图10是本实用新型实施例一的调弯滑块示意图;
36.图11是本实用新型实施例一的手柄的内鞘管调节段局部示意图;
37.图12是本实用新型实施例一的前壳体示意图;
38.图13是本实用新型实施例一的内鞘管滑块座示意图;
39.图14是本实用新型实施例一的内鞘管滑块示意图;
40.图15是本实用新型实施例一的内鞘管滑块剖视图;
41.图16是本实用新型实施例一的手柄的内芯管调节段局部示意图;
42.图17是本实用新型实施例一的内芯管滑块座示意图;
43.图18是本实用新型实施例一的内芯管滑块示意图;
44.图19是本实用新型实施例一的内芯管旋钮示意图;
45.图20是本实用新型实施例一的电控调节段示意图;
46.图21是本实用新型实施例一的输送装置电路图;
47.图22是本实用新型实施例一的分流器装载示意图;
48.图23是本实用新型实施例一的分流器完全装载示意图;
49.图24是本实用新型实施例一的分流器释放示意图;
50.图25是本实用新型实施例一的分流器完全释放示意图;
51.图中:1
‑
左心房、2
‑
左心室、3
‑
右心房、4
‑
右心室、5
‑
房间隔、6
‑
房间隔造口、7
‑
下腔静脉、10
‑
内芯管组件、11
‑
内芯管、12
‑
引导头、13
‑
固定头、13a
‑
定位槽、20
‑
内鞘管、21
‑
内鞘管本体、22
‑
收纳管、22a
‑
显影环、30
‑
外鞘管、30a
‑
刚性段、30b
‑
可调弯段、31
‑
内管、32
‑
卡箍、33
‑
加强管、34
‑
外管、35
‑
牵引丝、36
‑
金属丝、40
‑
分流器、41
‑
固定耳、42
‑
流入道、100
‑
手柄、101
‑
pu软管、102
‑
接头、104
‑
内鞘管电机、105
‑
内芯管电机、106
‑
电池、107
‑
电源开关、108a
‑
内鞘管后退按钮、108b
‑
内鞘管前进按钮、108c
‑
内芯管后退按钮、108d
‑
内芯管前进按钮、109
‑
电池盖、110
‑
内芯管调节段、111
‑
内芯管滑块、111a
‑
导向槽、111b
‑
凸台、111c
‑
内芯管安装孔、111d
‑
内芯管滑块注胶口、111e
‑
螺牙、112
‑
内芯管滑块座、112a
‑
固定杆、112b
‑
第一导向肋、112c
‑
第一开口槽、113
‑
内芯管调节旋钮、113a
‑
内芯管调节旋钮内螺纹、113b
‑
内芯管调节旋钮齿轮、114
‑
内芯管齿轮、120
‑
内鞘管调节段、121
‑
前壳体、121a
‑
内鞘管滑块套筒安装槽、121b
‑
内鞘管调节旋钮安装槽、121c
‑
内芯管滑块座安装槽、121d
‑
前壳体安装孔、121e前壳体滑轨、121f
‑
内鞘管电机安装槽、121g
‑
内鞘管电机盖板、121h
‑
内芯管电机安装槽、121i
‑
内芯管电机盖板、121j
‑
电池安装槽、122
‑
后壳体、122d
‑
螺纹孔、122e
‑
后壳体滑轨、122f排空管过孔、123
‑
内鞘管滑块座、123a
‑
内鞘管滑块座底座、123b
‑
螺纹孔、123c
‑
尖角、123d
‑
第二导向肋、124
‑
内鞘管滑块、124a
‑
内鞘管滑块导向槽、124b
‑
内鞘管调节螺纹、124c
‑
滑片、124d
‑
内鞘管安装孔、124e
‑
锥形孔通道、124f
‑
排气孔安装位、124g
‑
内鞘管排气孔、124h
‑
内鞘管密封圈容纳槽、124i
‑
锁紧螺纹、125
‑
内鞘管滑块套筒、125a
‑
圆锥齿轮、126
‑
内鞘管调节旋钮、126a
‑
旋转圆锥齿轮、127
‑
内鞘管密封圈、128
‑
锁紧盖、129
‑
内鞘管齿轮、130
‑
外鞘管调节段、131
‑
第一外壳、132
‑
锥形头、133
‑
c型卡环、134
‑
e型卡环、135
‑
调弯旋钮、136
‑
调弯套筒、137
‑
调弯滑块、137a
‑
导向槽、138
‑
外鞘管固定座、138a
‑
外鞘管固定座
底座、138b
‑
导轨、138c
‑
c型卡环安装槽、138d
‑
e型卡环安装槽、138e
‑
安装螺纹、138f
‑
注胶口、138g
‑
第二开口槽、138h
‑
外鞘管排气孔、138i
‑
容纳槽、139
‑
外鞘管密封圈。
具体实施方式
52.为了更清楚地说明本实用新型实施例,此处限定术语“近端”及“远端”为介入医疗领域惯用术语,即,“远端”表示手术操作过程中远离操作人员的一端,“近端”表示手术操作过程中靠近操作人员的一端。下面将对照附图说明本实用新型的具体实施方式。显而易见地,下面描述中的附图仅仅是本实用新型的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图,并获得其他的实施方式。
53.实施例一:
54.如图1所示,本实施例提供一种基于电控的房间隔分流器的输送装置,包括内芯管组件10、内鞘管20、外鞘管30和手柄100,内芯管组件10和内鞘管20均可沿轴向滑动,内芯管组件10与内鞘管20的近端均与手柄100相连,通过调节手柄100即可以实现内芯管组件10和内鞘管20在轴向方向上的往复滑动。
55.如图2所示,内芯管组件10包括内芯管11、引导头12和固定头13,引导头12和固定头13均固定在内芯管11上,其中引导头12位于内芯管11的最远端,内芯管组件10远端侧还套设有固定头13,引导头12与固定头13之间为分流器40安装位。固定头13外周设有定位槽13a,定位槽13a与分流器40的固定耳41相匹配,为了方便安装,所述定位槽13a的轮廓须略大于分流器40的固定耳41,本实施例中固定头13设有三个定位槽13a,定位槽13a沿周向均匀分布,即可知配套的分流器40设有三个固定耳41且位置与之一一对应。为减少磨损,固定头13的材料优选金属材料。
56.如图3所示,内鞘管20包括内鞘管本体21和收纳管22。收纳管22直径大于内鞘管本体21,用于约束分流器40。内鞘管本体21与收纳管22通过热缩成型在一起。内鞘管本体21由pebax等具有优良的生物相容性与一定硬度的材料制成。收纳管22需要束缚压缩后的分流器,因此选用透明度好、强度高的材料,优选pc。分流器40在释放的过程中,径向向外的膨胀力往往会对管口位置造成扩张性形变,因此收纳管22管口位置设有显影环22a,便于在x光照射下定位的同时进一步增强收纳管22的强度。
57.如图4和图5所示,外鞘管30具有可调弯功能,把外鞘管30分为刚性段30a和可调弯段30b。外鞘管30包括内管31、卡箍32、加强管33、外管34及牵引丝35。内管31需要具有一定柔韧性,因此选用柔性材料,优选ptfe。
58.其中,卡箍32和加强管33套设在内管31上,加强管33位于可调弯段30b,由金属管切割而成,具有一定刚度的同时,能够在轴向方向上进行弯曲;外管34由pebax等具有优良的生物相容性与一定硬度的材料制成,并且,外管34在可调弯段30b的硬度必须小于其他部分的硬度,使可调弯段30b易于发生弯曲。此外,外管34在加强管33镂空的一侧设有一条起始于可调弯段30b远端部分直至通向管体近端位置的拉线腔,以供牵引丝35通过。内管31、卡箍32、增强管以及外管34通过热熔或者粘接成型在一起。牵引丝35一端固定于卡箍32上,另一端沿拉线腔自外管34近端位置延伸至管外,最终固定于手柄上,拉扯牵引丝35即可实现对外鞘管30的调弯。外鞘管30调弯范围在0
°
~90
°
之间任意调节。
59.如图6所示,手柄分为三个部分,包括外鞘管调节段130、内鞘管调节段120以及内芯管调节段110。三段分别用于控制外鞘管30的调弯、内鞘管20的伸缩以及内芯管11的伸缩。
60.如图7所示,外鞘管调节段130包括第一外壳131、锥形头132、c型卡环133、e型卡环134、调弯旋钮135、调弯套筒136、调弯滑块137、外鞘管固定座138以及外鞘管密封圈139。
61.如图8至图10所示,外鞘管固定座138呈直筒状,外鞘管固定座底座138a与第一外壳131通过螺栓固定。调弯滑块137套设于外鞘管固定座138的管体上,138b为导轨,分布于外鞘管固定座138的管体两侧,与调弯滑块137内腔两侧的导向槽137a配合。调弯套筒136套设于调弯滑块137上,两者螺纹互相配合,调弯旋钮135和调弯套筒136通过螺栓固联,操作人员转动旋钮即可实现调弯滑块137的直线滑动。138c为c型卡环安装槽,用于安装c型卡环133,c型卡环133与第一外壳131的端面限制了调弯旋钮135与调弯套筒136的轴向自由度,使其只能做周向转动。
62.外鞘管固定座138顶部设有锥形头安装螺纹138e,用于与所述锥形头132连接。138d为e型卡环安装槽,用于安装e型卡环134,所述锥形头132内螺纹的端面拧至e型卡环134处时即被限制,防止继续拧下去对调弯旋钮135造成压迫,从而影响旋钮转动。
63.外鞘管30与外鞘管固定座138相连,外鞘管30的近端部分插入外鞘管30安装孔后,通过注胶口138f注胶,即可使外鞘管30与外鞘管固定座138粘接在一起,同时起到密封作用。
64.牵引丝35通过第一开口槽112c和第二开口槽138g可与调弯滑块137连接。牵引丝35穿过调弯滑块137的小孔可在尾端焊接一小段金属丝36或者直接以粘接的方式防止脱落,这样通过滑动调弯滑块137即可实现控制外鞘管30曲率的目的。
65.外鞘管固定座底座138a侧面设有外鞘管排气孔138h,排空管组件通过外鞘管排气孔138h与外鞘管固定座138粘接,排空管组件包括pu软管101与鲁尔接头102。外鞘管固定座138底部设有外鞘管密封圈容纳槽138i,用于放置外鞘管密封圈139,外鞘管密封圈139材料优选医用硅胶。
66.当外鞘管调节段130与内鞘管调节段120连接时,内鞘管调节段120的内鞘管滑块座123的端面尖角123c环压外鞘管密封圈139,内鞘管20穿过外鞘管密封圈139中间的通孔,这样外鞘管密封圈139就对外鞘管调节段130与内鞘管调节段120之间起到了密封作用,操作人员向鲁尔接头102充入生理盐水即可排除外鞘管30中的气体。
67.如图11所示,内鞘管调节段120包括前壳体121、后壳体122、内鞘管滑块座123、内鞘管滑块124、内鞘管滑块套筒125、内鞘管调节旋钮126、内鞘管密封圈127以及锁紧盖128、内鞘管齿轮129以及内鞘管电机104。
68.如图12至图15所示,内鞘管滑块座123呈直筒状,内鞘管滑块座底座123a周向均布若干螺纹孔123b,与前壳体121和后壳体122以及外鞘管调节段130的安装孔位置一一对应。螺栓从外鞘管调节段130一侧穿过安装孔与内鞘管滑块座123螺接,即可使内鞘管滑块座123、前壳体121、后壳体122与外鞘管调节段130固定连接。
69.内鞘管滑块座123的端面设有一圈突起的尖角123c,尖角顶端形成的圆直径略小于外鞘管密封圈139的直径,确保能压合外鞘管密封圈139四周。内鞘管滑块124套设于内鞘管滑块座123上,内鞘管滑块座123的外管体两侧设有第二导向肋123d,内鞘管滑块124可沿
第二导向肋123d直线滑动。
70.内鞘管滑块124套设于内鞘管滑块座123上,124a为内鞘管滑块导向槽,与内鞘管滑块座123的第二导向肋123d相配合,使内鞘管滑块124沿轴向直线滑动。124b为内鞘管调节螺纹,与内鞘管滑块套筒125的内螺纹相配合,转动内鞘管滑块套筒125可实现内鞘管滑块124的直线滑动。
71.内鞘管滑块套筒125外表面设有圆锥齿轮125a,圆锥齿轮125a与内鞘管调节旋钮126上的旋钮圆锥齿轮126a以及内鞘管齿轮129啮合,圆锥齿轮125a与旋钮圆锥齿轮126a轴交角为90
°
,与内鞘管齿轮129轴交角为0
°
。内鞘管齿轮129与内鞘管电机104相连,转动内鞘管调节旋钮126或者启动内鞘管电机104即可带动内鞘管滑块套筒125同步旋转,进一步带动内鞘管滑块124进行轴向的直线滑动。内鞘管电机104安装于内鞘管电机安装槽121f中,通过内鞘管电机盖板121g与螺栓固定。
72.内鞘管滑块124两侧设有滑片124c,滑片124c在前后壳体的滑轨121e与122e上滑动,辅助内鞘管滑块124在滑动的过程中确保与导管之间的同轴度不产生较大偏差。
73.内鞘管滑块124内部设有内鞘管安装孔124d,内鞘管20插入内鞘管安装孔124d后通过内鞘管滑块注胶口124e注胶,即可使内鞘管20与内鞘管滑块124粘接在一起,同时起到密封作用。
74.内鞘管安装孔124d邻位的锥形孔通道124e供内芯管11通过,锥形孔通道124e侧方延伸出一段排气孔安装位124f,排气孔安装位124f与pu软管101相连,pu软管101与鲁尔接头102相连。124g为内鞘管排气孔124g,内鞘管排气孔124g与锥形孔通道124e相通,排空管组件通过内鞘管排气孔124g与内鞘管滑块124粘接,通过前壳体121的排空管过孔121e伸出手柄之外。
75.内鞘管滑块124排空侧端面设有内鞘管密封圈容纳槽124h,用于安装内鞘管密封圈127,内鞘管密封圈127材料优选医用硅胶;锥形孔通道124e外侧设有锁紧螺纹124i,锁紧螺纹124i与锁紧盖128内螺纹相配合。通过旋动锁紧盖128,可对内鞘管密封圈127的四周进行挤压,从而达到密封效果。内芯管11穿过内鞘管密封圈127中间的通孔,这样内鞘管密封圈127就对内鞘管调节段与内芯管调节段之间起到了密封作用,操作人员向排空管组件充入生理盐水即可排除内鞘管20中的气体。
76.如图16至图19所示,内芯管调节段包括内芯管滑块111、内芯管滑块座112以及内芯管调节旋钮113、内芯管齿轮114以及内芯管电机105。
77.内芯管滑块座112呈直筒状,两侧设有固定杆112a,放置于前后壳体的内芯管滑块座第一开口槽112c中,明显的,内芯管滑块座112被完全固定。内芯管滑块座112内腔设有一条第一导向肋112b,另一侧设有开口槽,分别与所述内芯管滑块111的导向槽111a与凸台111b配合,从而使内芯管滑块111在内芯管滑块座112的轨道上前后滑动。
78.内芯管滑块111内部设有内芯管安装孔111c,内芯管11插入内芯管安装孔111c后通过内芯管滑块注胶口111d注胶,即可使内芯管11与内芯管滑块111粘接在一起。
79.内芯管滑块111的凸台顶端设有螺牙111e,螺牙111e超出内芯管滑块座112的管体外表面,与内芯管调节旋钮113的内螺纹相配合,内芯管调节旋钮113套设于内芯管滑块座112上,安装于前后壳体的内芯管调节旋钮安装槽中。通过转动内芯管调节旋钮113,即可带动内芯管滑块111轴向滑动。
80.内芯管调节旋钮113上设有内芯管调节旋钮齿轮113b,与内芯管齿轮114啮合,内芯管齿轮114与内芯管电机105相连。启动内芯管电机105使内芯管齿轮114旋转,随即带动内芯管调节旋钮113转动,进一步即可使内芯管滑块111轴向滑动。内芯管电机105安装于内芯管电机安装槽121h中,通过内芯管电机盖板121i与若干螺栓固定。前壳体121设有前壳体安装孔121d,与后壳体122上的螺纹孔122d相对应,通过螺栓锁紧即可完成前后壳体的装配。
81.如图20所示,电控组件括内芯管电机105、内鞘管电机104、电池106,和107为电源开关,内芯管电机105和内鞘管电机104分别与电池106电连接,内芯管电机105安装于内芯管调节段110,内鞘管电机104安装于内鞘管调节段120。内鞘管调节段120和内芯管调节段110可通过电控进行调节。内鞘管电机104与内芯管电机105分别通过电池106供电,电池106安装于前壳体121的电池安装槽121j中,电池安装槽121j上安装电池盖109。手柄100上安装数个按钮,包括内鞘管后退按钮108a,内鞘管前进按钮108b,内芯管后退按钮108c,内芯管前进按钮108d。
82.由于是电池供电,因此内鞘管电机104与内芯管电机105选用直流电机。直流电机的两根电源线是不分正负极的,假设两根电源线代号分别为a、b。当a线接正极,b线接负极时,电机正转(反转);那么当b线接正极,a线接负极时,电机反转(正转)。也就是说只要将两根电源线的正负极调换,即可实现直流电机正反转。
83.如图21所示,本实施例采用接入二极管的方法实现电源线的正负极调换,从而控制内鞘管电机104与内芯管电机105的正反转。二极管是电子元件当中,一种具有两个电极的装置,只允许电流由单一方向流过(称为顺向偏压),反向时阻断(称为逆向偏压)。因此,二极管可以想成电子版的逆止阀。当按下电源开关107,电路接通。内鞘管后退按钮108a控制内鞘管电机104正转,从而带动内鞘管20后退;内鞘管前进按钮108b控制内鞘管电机104反转,从而带动内鞘管20前进;内芯管前进按钮108d控制内芯管电机105正转,从而带动内芯管11前进;内芯管后退按钮108c控制内芯管电机105反转,从而带动内芯管11后退。
84.如图22至23所示,分流器40的支架材料为镍钛合金,具有压缩与舒张两种状态,为减小对人体的损伤,在进行手术之前,我们通常需要对分流器40进行压缩,然后装载到输送装置中。其中,内鞘管滑块124和内芯管滑块111的滑动行程大于分流器40被压缩的长度。
85.具体操作过程如下:首先,将分流器40放入冰水中使其软化,将固定耳41嵌入固定头13的定位槽13a中。由于分流器40的固定耳41为铲形结构,因此分流器40的轴向位置被约束;然后,打开电源开关键107接通电路,按下内芯管后退按钮108c或者转动内芯管调节旋钮113回拉内芯管11,从而使固定头13拉动分流器40进入到收纳管22中;最后,长按内芯管后退按钮108c或者继续转动内芯管调节旋钮113,直到分流器40完全被收束到收纳管22中,引导头12盖住收纳管22管口,分流器40被约束为压缩状态,即可实现装载。
86.如图24至图25所示,心脏构造包括左心房1、左心室2、右心房3、右心室4以及房间隔5,分流器40经导管通过下腔静脉7进入患者心脏,操作人员通过转动外鞘管调弯旋钮135来控制外鞘管30远端可调弯段30b的曲率,然后递送分流器40至靶向位置的房间隔造口6,调整好位置后,即可操作手柄对分流器40进行释放。按下内鞘管后退按钮108a或者旋转内鞘管调节旋钮126,回拉内鞘管20,分流器40流入道42部分的支架即可脱离收纳管22的约束而逐渐展开。(在释放过程中,如果发现分流器40释放的位置不准确,可通过按下内鞘管后
退按钮108c或者旋转内芯管调节旋钮113回拉内芯管11,从而对分流器40进行回收,以便重新释放。)分流器40流入道42完全展开后,回撤输送装置使流入道42部分支架贴合房间隔5内壁。然后继续按下内鞘管后退按钮108a或者转动内鞘管调节旋钮126回拉内鞘管20,直至固定耳41完全脱离收纳管22的束缚,从而使分流器40失去径向上的约束后完全弹开,从而完成分流器40的释放。此时分流器40开始工作,撤出输送装置即可完成手术。
87.本实施例的输送装置通过电控组件能够实现自动调节,以提高定位精度,同时兼顾手动微调节,以实现精确定位。同时输送装置可以实现与个体化的生理解剖结构相适应,释放精准,操作便捷。分流器在植入过程中,当出现定位偏差时,可以随时调节输送装置,以调整输送位置,定位准确。
88.以上所述仅是对本实用新型的优选实施例及原理进行了详细说明,对本领域的普通技术人员而言,依据本实用新型提供的思想,在具体实施方式上会有改变之处,而这些改变也应视为本实用新型的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1