数字测定装置及测定方法与流程
1.本发明涉及数字测定装置及测定方法,更具体地,涉及可以实现对于如牙科用牙髓锉的测定对象的精密测定的数字测定装置及测定方法。
背景技术:
2.通常,牙科用牙髓锉(endodontic file)用于如测定根冠长度、尺寸(神经)去除及根冠形成的牙科治疗。其中,根冠形成为干净地去除留在牙齿的神经管内部的神经及被感染的神经管壁并扩大的过程。
3.另一方面,为了对根冠进行治疗,需要先测定根冠的长度。由于每位患者的牙齿的神经长度不相同,因此,这种根冠治疗需要使用符合患者的神经长度的牙髓锉。
4.通常,在牙髓锉设置挡止部,在测定根冠长度的过程中,需要向测定位置移动挡止部来显示根冠长度。其中,若通过移动挡止部而在牙髓锉显示根冠长度,则通过测定牙髓锉的长度来计算根冠作业长度。在此情况下,依次扩大根冠并需要去除牙根端内部的神经阻滞等的残骸,因此,需要从厚度相对薄的牙髓锉开始使用逐渐厚的牙髓锉。
5.另一方面,若依赖于治疗人员的手工作业来调节牙髓锉的挡止部的位置,则很难读取微细的刻度,从而长度测定准确度受到了限制。不仅如此,有可能因治疗人员的失误,挡止部的位置无法变更,由此,反复测定长度将会导致手术的时间变长,同时,治疗的可靠性将会降低。
6.由此,最近,持续进行准确地测定牙髓锉的长度来提高治疗的准确度和可靠性的研究。
技术实现要素:
7.(发明要解决的技术问题)
8.本发明的目的在于,提供如下的数字测定装置及测定方法,即,可通过简单的测定方式准确地测定如用于牙科治疗的牙髓锉的测定对象的长度。
9.本发明的另一目的在于,提供如下的数字测定装置及测定方法,即,可通过测定测定对象的长度来作为用于调节新的测定对象的长度的基准值提供并进行对比,由此可提高调节便利性。
10.(解决问题的技术方案)
11.用于实现上述目的的本发明的数字测定装置包括:放置部,用于放置测定对象;以及测定部,用于测定上述测定对象的长度,通过所测定的上述测定对象的测定值提供用于调节新的测定对象的长度的基准值,上述测定部通过如下方式中的至少一种方式测定上述测定对象的长度:移动方式,换算受到向上述放置部进入的上述测定对象的干扰来进行移动的距离;照射方式,朝向上述测定对象照射测定信号,通过所检测的上述测定信号的信息换算上述测定对象的长度;以及扫描方式,对上述测定对象进行扫描。
12.并且,上述放置部可包括具有对准上述测定对象的一侧的基准点的平坦的托架,
上述测定对象包括具有挡止部的牙髓锉,并放置于上述放置部,以使上述挡止部对准上述基准点。
13.并且,上述放置部可被分离及进行消毒。
14.并且,上述测定部可包括:移动部件,能够与上述测定对象联动来进行移动;以及换算部,用于将基于上述移动部件的移动的上述移动距离换算成上述测定对象的长度。
15.并且,上述测定部可包括:上述移动部件内置有驱动单元,从而能够通过朝向上述测定对象施加的驱动力沿着轨道进行直线往复运动,上述换算部通过沿着上述轨道移动的上述移动部件的驱动转数或基于上述移动部件的移动的静电容量变化换算上述测定对象的长度。
16.并且,上述移动部件可包括电磁铁,能够根据从外部输入的信号选择性地产生电磁力来朝向上述测定对象施加所产生的电磁力,从而能够沿着轨道进行直线往复运动,上述换算部通过沿着上述轨道移动的上述移动部件的驱动转数或基于上述移动部件的静电容量变化换算上述测定对象的长度。
17.并且,上述测定部可朝向上述测定对象端部,沿着水平或垂直方向照射上述测定信号。
18.并且,上述测定信号可包含激光或超声波信号。
19.并且,上述测定部可将向上述测定对象照射上述测定信号之后返回的时间换算成长度之后,将所换算的值除以2来换算上述测定对象的长度。
20.并且,上述放置部可包括在密封的空间中放置上述测定对象的扫描仪,上述测定部通过向上述测定对象照射光来对所生成的影子进行扫描。
21.并且,本发明还可包括对比部,用于显示由上述测定部测定的基准值,与新的上述测定对象的长度进行对比。
22.并且,可以以与在上述对比部显示的上述基准值相邻的方式使新的上述测定对象进入,以将上述测定对象的长度调节成与上述基准值吻合。
23.并且,上述对比部可相互相邻显示第一图像及第二图像,上述第一图像与上述基准值对应,在上述第二图像中,新的上述测定对象的长度与由上述测定部测定的测定值对应,调节新的上述测定对象的长度,以使上述第二图像与上述第一图像吻合。
24.本发明优选一实施例的数字测定方法包括:测定步骤,测定需要测定的测定对象的长度;以及对比步骤,将在上述测定步骤中测定的测定值设定为基准值,来在对新的测定对象的长度与上述基准值进行对比后调节;上述测定步骤通过如下方式中的至少一种方式测定上述测定对象的长度:移动方式,换算受到上述测定对象的干扰来进行移动的距离;照射方式,朝向上述测定对象照射测定信号,通过所检测的上述测定信号的信息换算上述测定对象的长度;以及扫描方式,对上述测定对象进行扫描。
25.并且,上述测定步骤可包括:移动步骤,移动部件沿着轨道进行移动,以朝向上述测定对象施加压力;以及换算步骤,通过检测基于上述移动部件进行移动的静电容量变化或驱动转数变化来换算上述测定对象的长度,在上述移动步骤中,移动部件通过马达的驱动力或电磁铁的电磁力沿着向上述测定对象施加压力的方向进行移动。
26.并且,上述测定步骤可包括:照射步骤,向上述测定对象照射上述测定信号;以及换算步骤,将从上述测定对象返回的上述测定信号的信号换算成长度之后,将所换算的值
除以2来换算上述测定对象的长度,上述测定信号包括激光或超声波信号。
27.并且,上述测定信号可朝向上述测定对象的端部,沿着水平或垂直方向进行照射。
28.并且,在上述测定步骤中,可向放置于扫描仪的上述测定对象照射光来对所生成的影子进行扫描。
29.并且,上述对比步骤可包括:显示步骤,通过显示单元,以图像方式显示上述基准值;以及调节步骤,以与上述图像相邻的方式使新的上述测定对象进入,以使新的上述测定对象的长度与上述图像吻合。
30.并且,上述对比步骤可包括:显示步骤,以第一图像的方式在显示单元显示上述基准值;以及调节步骤,以第二图像的方式在上述显示单元显示测定新的上述测定对象的测定值,以使其与上述第一图像相邻,调节新的上述测定对象的长度,以使上述第一图像及第二图像相互吻合。
31.并且,在上述对比步骤之后,本发明数字测定方法还可包括提醒新的上述测定对象的测定值是否与上述基准值吻合的提醒步骤。
32.(发明的效果)
33.根据具有上述结构的本发明,本发明具有如下的效果,即,随着可通过基于朝向测定对象移动的移动距离或者朝向测定对象照射规定信号并反射的信号值来测定测定对象的长度,可通过简单的结构及方式提高测定对象的长度测定准确度。
34.并且,本发明具有如下的效果,即,可通过简单的结构提高如作为牙科用治疗器具中的一种的牙髓锉的测定对象的长度的测定准确度,从而,可提高使用人员的接近性,同时也可以提高治疗可靠性。
附图说明
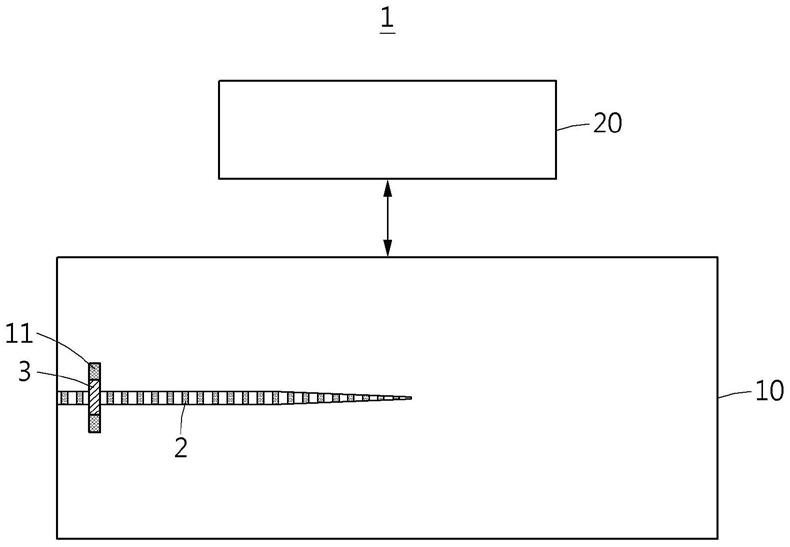
35.图1为简要示出本发明优选一实施例的数字测定装置的结构图。
36.图2为简要示出本发明优选一实施例的数字测定装置的剖视图。
37.图3为简要示出图2所示的数字测定装置的测定工作的剖视图。
38.图4为简要示出图2及图3所示的测定部的变形例的剖视图。
39.图5为简要示出通过图2至图4测定的测定对象的测定值在对比部作为基准值显示来调节新的测定对象的长度的第一种方法的图。
40.图6为简要示出通过图2至图4测定的测定对象的测定值在对比部作为基准值显示来调节新的测定对象的长度的第二种方法的图。
41.图7为简要示出图1至图6所示的一实施例的数字测定方法的流程图。
42.图8为简要示出本发明优选另一实施例的数字测定装置的图。
43.图9为简要示出图8所示的测定部的变形例的图。
具体实施方式
44.以下,参照附图,说明本发明优选实施例。只是,本发明的思想并不局限于这些实施例,本发明的思想可通过形成实施例的结构要素的附加、变更及删除等不同地提出,这也属于本发明的思想。
45.参照图1及图2,本发明优选实施例的数字测定装置1包括放置部10及测定部20。
46.作为参考,在本发明中说明的数字测定装置1为用于测定在牙科治疗中所使用的牙科用测定对象2的长度。更具体地,在本发明中说明的测定对象2为在牙齿的神经治疗过程中,用于测定根冠长度、牙髓神经去除、根冠形成等的牙髓锉(endodontic file),但并不局限于此。
47.放置部10用于放置测定对象2。如图2所示,上述放置部10用于放置测定对象2,在一侧设置对准测定对象2的一侧的基准点11。
48.作为参考,放置部10的上部面呈平坦的托架形状,以可放置测定对象2。并且,基准点11并不局限于图2所示的标记形状,但可以通过如槽或突起的多种变形例形成于放置部10。
49.另一方面,虽然并未详细示出,放置部10被分离并交替或者进行消毒,由此,优选地,从细菌保护包括如牙髓锉的治疗道具的测定对象2。
50.测定部20用于测定放置于放置部10的测定对象2的长度。其中,测定部20测定放置于放置部10的测定对象2的长度,由此,通过测定对象2的测定值提供用于调节新的测定对象2的长度的基准值s(参照图5)。
51.另一方面,本发明的测定部20通过如下方式中的至少一种方式测定测定对象2的长度:移动方式,换算受到向上述放置部10进入的上述测定对象2的干扰来进行移动的距离;照射方式,朝向上述测定对象2照射测定信号,通过所检测的上述测定信号的信息换算上述测定对象2的长度;以及扫描方式,对上述测定对象2进行扫描。
52.如图2及图3所示,本发明优选一实施例的数字测定装置1的测定部20通过移动方式测定测定对象2的长度。
53.参照图2,测定部20包括移动部件21和换算部22。
54.移动部件21可以沿着放置部10,向长度方向进行移动。如图2及图3所示,上述移动部件21可沿着设置于放置部10的轨道23,向长度方向进行移动。其中,轨道23对移动部件21进行支撑,以使移动部件21可以沿着设置于放置部10的轨道23,向长度方向进行移动。
55.另一方面,移动部件21可通过马达(未图示)的旋转驱动力,沿着轨道23,向直线方向进行移动。在此情况下,移动部件21通过马达(未图示)的驱动力获得朝向基准点11进行移动的力。即,移动部件21内置有作为驱动力发生单元的马达(未图示)。上述移动部件21通过从马达(未图示)发生的驱动力,沿着轨道23进行移动,同时,朝向基准点11施加压力。
56.如图3所示,上述移动部件21受到放置于放置部10的测定对象2的端部的干扰而可以向箭头方向进行移动。更具体地,测定对象2在对准放置部10的基准点11的状态下进入,同时,测定对象2的端部对移动部件21施加压力来使其进行移动。其中,移动部件21即使通过与测定对象2的端部的接触向箭头方向进行移动,通过马达(未图示)的驱动力,移动部件21也将朝向基准点11施加压力,由此,移动部件21维持紧贴在测定对象2的端部的状态。
57.作为参考,在本发明中说明的测定对象2包括牙髓锉,在牙髓锉设置挡止部3。在此情况下,在测定牙髓锉的根冠长度的过程中,随着使挡止部3向测定位置移动来显示根冠长度,需要测定的测定对象2的长度与挡止部3与端部之间的长度相对应。由此,将测定对象2的挡止部3放置于放置部10的基准点11来使其吻合,由测定部20测定从基准点11延伸的测定对象2的长度。
58.换算部22将基于移动部件21的移动的移动距离换算成测定对象2的长度。为此,换
算部22通过沿着轨道23移动的移动部件21的转数或基于移动部件21的静电容量变化换算测定对象2的长度。图2及图3中说明换算部22通过静电容量变化换算测定对象2的长度。
59.如图2所示,沿着放置部10的轨道23设置用于检测静电容量的铜板24。如图2及图3所示,换算部22识别基于移动部件21的移动的在铜板24中的静电容量来换算测定对象2的长度。这种铜板24虽然被例示及图示成设置于放置部10,以与轨道23相向,但并不局限于此,也可以与轨道23形成为一体。
60.另一方面,在图2及图3的图示中,在测定部20的移动部件21位于基准点11附近的状态下,通过测定对象2的进入沿着从基准点11远离的方向进行移动,但并不局限于此。即,如图4所示,移动部件21’可以朝向基准点11进行移动,以在从基准点11隔开的位置中与测定对象2相接触。如图4所示的移动部件21’的移动也通过马达(未图示)的驱动力沿着轨道23进行移动,换算部22通过检测在基于沿着轨道23进行移动的铜板24中的静电容量变化来最终换算测定对象2的长度。
61.作为参考,换算部22不仅可以使用通过检测在铜板24中的静电容量变化的测定方式,还可以使用通过检测沿着轨道23进行移动的移动部件21的移动时的驱动转数来换算测定对象2的长度的变形例。
62.并且,参照图2至图4说明的移动部件21可以通过马达(未图示)的驱动力进行移动,但并不局限于此。例如,本发明也可以具有设置有移动部件21,以从如电磁铁的外部输入电磁信号,则产生电磁力,由此,当产生电磁力时,朝向基准点11施加压力的变形例。在此情况下,包括电磁铁的移动部件21也可以沿着轨道23,向长度方向进行移动。
63.在包括电磁铁的移动部件21的情况下,当输入电磁信号时,获得自动回到基准点11的力,上述力为使测定对象2的移动不发生变形的力。由此,若从放置部10去除测定对象2,则移动部件21通过电磁铁方式朝向基准点11复原并设置。
64.若这种电磁铁方式的移动部件21对准放置部10的基准点11来放置测定对象2,则移动部件21通过电磁力朝向基准点11施加压力,由此,将与测定对象2的端部相接触。如上所述,若测定对象2的端部与移动部件21相接触,则换算部22反向计算移动部件21的相反移动距离来换算测定对象2的长度。在此情况下,换算部22可通过换算基于移动部件21的移动的铜板的静电容量变换来测定测定对象2的长度。或者,换算部22也可通过换算移动部件21沿着轨道23进行移动的驱动转数来换算测定对象2的长度。
65.另一方面,如图5所示,本发明的数字测定装置1可包括放置部10、测定部20及对比部30。
66.对比部30将从测定部20测定的测定对象2的长度作为基准值s提供,来与新进入的测定对象2的长度进行对比。若由测定部20测定测定对象2的长度来设定基准值s,则如图5所示,上述对比部30可将其显示成如矩形的规定图形图像。即,对比部30包括一种显示单元,由此,将作为已测定的测定对象2的长度的基准值s以图像显示。
67.另一方面,如图5及图6所示,通过对比部30的测定对象2的基准值s对比可通过2种方法实现。
68.首先,参照图5,在包括显示单元的对比部30中,与已测定的测定对象2的测定值相对应的基准值s以矩形的图像显示。使用人员将新的测定对象2向对比部30进入来对基准值s与测定对象2进行比较,以与所显示的基准值s进行比较。由此,使用人员调节包括牙髓锉
的测定对象2的挡止部3的位置,以与基准值s吻合,由此,使测定对象2的长度与基准值吻合。
69.并且,如图6所示,对比部30可将已测定的基准值s以第一图像s1显示,测定通过测定部20测定的测定对象2的长度来以第二图像s2显示。即,在对比部30中,基准值s和与此进行对比的新的测定对象2的测定值均以矩形的第一图像s1及第二图像s2显示,从而进行相互对比。在此情况下,优选地,第一图像s1及第二图像s2相互整齐地显示。
70.参照图7,整理具有上述结构的本发明的数字测定装置1的测定对象2的测定方法如下。
71.如图7所示,本发明的数字测定方法包括测定步骤4及对比步骤5。
72.测定步骤4测定与测定对象2的长度对应的测定值。为此,在测定步骤4中,使测定对象2进入到放置部10来通过移动方式测定测定对象2的长度。更具体地,在移动部件21位于放置部10的基准点11附近的初始状态下,测定对象2进入到基准点11,以与挡止部3吻合。因此,如图3所示,与测定对象2的进入联动,与测定对象2的端部相接触的移动部件21通过作为测定对象2的进入方向的箭头方向进行移动。
73.在此情况下,与测定对象2的进入联动,移动部件21沿着轨道23进行移动。其中,移动部件21通过内置的马达(未图示)获得朝向基准点11的力,由此,最终换算与移动部件21的移动距离相对应的测定对象2的长度。
74.通过这种移动部件21的移动,位于轨道23的底部的铜板24的静电容量将发生变化。换算部22检测这种铜板24的静电容量变化,由此,最终换算与移动部件21的移动距离相对应的测定对象2的长度。
75.如图4所示,在移动部件21’的初始位置从基准点11隔开的状态下,检测基于移动部件21’的移动距离的静电容量变化,使得换算部22测定测定对象2的长度。即,换算部22检测移动部件21’基于以与所进入的测定对象2的端部相接触的方式进行移动的距离的静电容量变化来换算测定对象2的长度,以使挡止部3位于基准点11。
76.并且,在移动部件21设置有电磁铁,而并非为马达的情况下,如图3及图4所示,移动部件21通过电磁力获得朝向基准点11的力。由此,换算部22检测基于与对于放置部10的测定对象2的进入联动的移动部件21的移动的距离的静电容量变化来换算测定对象2的长度。
77.在对比步骤5中,将在测定步骤4中测定的测定对象2的长度设定成基准值s,来与新进入的测定对象2的长度进行对比。如图5所示,在对比步骤5中,通过包括显示单元的对比部30显示基准值s,来与需要测定的测定对象2的长度进行比较来进行调节。或者,如图6所示,在对比部30中,基准值s以第一图像s1显示,需要测定的测定对象2的测定值以第二图像s2显示,从而可以进行相互对比。
78.更具体地,在对比步骤5中,可使新的测定对象2继续进入来通过反复测定调节长度,通过如下的2种调节方法调节测定对象2的长度。
79.如图5所示,在第一个调节方法中,在测定步骤4中测定的测定值通过包括显示单元的对比部30以作为矩形的图像的基准值s显示。即,对比部30为用于调节新的测定对象2的长度的基准,将在测定步骤4中测定的测定值作为基准值s显示。
80.之后,使用人员将新的测定对象2进入到对比部30,以与显示在对比部30的基准值
s吻合。在此情况下,使用人员调节挡止部3的位置,以使从作为测定对象2的牙髓锉的挡止部3至端部的长度与基准值s的长度吻合,由此使基准值s与新的测定对象2的长度相互吻合。这种调节方法可以继续使测定对象2进入来调节长度。
81.参照图6,说明第二个调节方法。
82.如图6所示,在测定步骤4中测定的测定值通过对比部30以第一图像s1显示。并且,新的测定对象2也进入到放置部10来测定长度,所测定的新的测定对象2的测定值将通过对比部30以第二图像s2显示。即,测定部20将第一图像s1作为用于调节新的测定对象2的长度的基准,与第一图像s1整齐地显示第二图像s2,由此,相互进行长度对比。
83.由此,使用人员调节放置于放置部10的测定对象2的长度来将新的测定对象2的长度调节成与第一测定值s1对应的长度来使其吻合。
84.在上述第二个测定方法中,将另一个测定对象2继续进入到放置部10,以与显示在对比部30的第一图像s1进行比较,由此,可以实现对于新的测定对象2的反复的长度测定。
85.另一方面,在对比步骤5中,可通过如提醒音的提醒单元向使用人员提醒测定对象的测定值接近基准值s。例如,可增加提醒音速度,以使测定对象2的测定值与基准值s吻合,可以向使用人员提醒测定值与基准值逐渐接近。
86.参照图8,简要示出本发明另一实施例的数字测定装置100。
87.如图8所示,另一实施例的数字测定装置100包括放置部110及测定部120。
88.放置部110用于放置需要测定的测定对象2。这种放置部110的结构与参照图1至图4说明的一实施例的放置部10类似,因此,将省略对其的详细说明。
89.测定部120对放置于放置部110测定对象2的长度与作为已设定的测定值的基准值进行迪比来测定。另一实施例的测定部120通过如下的照射方式测定测定对象2的长度,即,朝向测定对象2照射规定测定信号r,通过所检测的测定信号r的信息值换算测定对象2的长度。
90.作为参考,除利用这种照射方式的测定部120的结构之外的结构与一实施例类似,因此,将省略对其的详细说明及图示。
91.如图8所示,另一实施例的测定部120朝向测定对象2照射如激光r的光,并通过检测反射回来的激光r检测换算测定对象2的长度。在此情况下,测定部120计算从朝向测定对象2照射激光r的时间至激光r从测定对象2反射回来的时间来换算长度之后,将所换算的值除以2来最终测定测定对象2的长度。
92.另一方面,在激光r通过微弱信息的信号向测定部120反射的情况下,所反射的激光r可通过滤波器增幅。在此情况下,在向测定部120入射的激光r增幅的情况下,测定部120通过所增幅的值的大小来判断测定对象2的长度。
93.如图8所示,这种测定部120对端部沿着垂直方向照射激光r来检测反射的激光r,以使激光r与测定对象2的端部相向。但是,并不局限于此,如图9所示,测定部120’也可以朝向测定对象2的端部,沿着与测定对象2的长度方向水平的方向照射激光r。
94.并且,测定部120、120’也可以利用超声波来测定测定对象2的长度,而并非利用激光r。在测定部120、120’照射超声波的情况下,测定部120、120’向与测定对象2的端部垂直或水平的方向照射超声波之后,检测从测定对象2反射的超声波信号来测定测定对象2的长度。
95.从上述测定部120、120’测定的测定值可以作为基准值s显示在对比部30,从而可以提供测定对象2的基准。用于测定这种测定对象2的长度的对比部30的结构与参照上述图5至图7的一实施例类似,因此,将省略对其的详细说明。
96.作为参考,虽然并未详细示出,也可以是均适用一实施例及另一实施例的测定部20、120的测定方式的实施例。即,可以使用如下的测定方法,即,换算移动部件21进行移动的距离,换算以与测定对象2相接触,同时,向测定对象2照射激光r并返回的时间,由此,可通过测定对象2的长度来与基准值进行对比。
97.并且,也可以通过利用光传感器来识别测定对象2的影子的扫描方式适用测定部20、120。其中,在扫描方式的情况下,放置测定对象2的放置部10包括一种扫描仪。在这种扫描方式的情况下,朝向放置于包括扫描仪的放置部10的测定对象2,向垂直方向照射光来识别测定对象2的影子,由此,测定部20、120换算测定对象2的长度。
98.在此情况下,优选地,在密封的空间进行测定,以防止测定对象2的影子歪曲,随着光需要恒定且均匀地照射测定对象2,无需适用棱镜。
99.如上所述,虽然,参照本发明优选实施例说明了本发明,只要是本发明所属技术领域的普通技术人员,在不超出以下的发明要求保护范围中所记载的本发明的思想及领域的范围内,可对本发明进行多种修改及变更。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1