用于组织切除和成像的机器人臂和方法与流程
用于组织切除和成像的机器人臂和方法
1.相关申请的交叉引用
2.本技术根据美国法典第35编第119条(e)款要求2019年11月11日提交的第62/933,793号美国临时申请和2019年3月7日提交的第62/814,966号美国临时申请的权益,这两个美国临时申请的公开内容通过该引用被全部并入。
3.本技术的主题涉及下面的专利和专利申请:2008年1月2日提交的第11/968,445号美国临时申请,现在为第7,882,841号美国专利;2009年3月6日提交的第12/399,585号美国临时申请,现在为第8,814,921号美国专利;2014年7月17日提交的第14/334,247号美国临时申请,现在为第9,364,251号美国专利;以及2015年9月4日提交的第pct/us2015/048695号国际申请;它们的全部内容通过引入被并入本文。
4.背景
5.本公开的领域涉及用能量处理组织,且更特别地涉及用液流能量处理器官(例如前列腺)。
6.处理受验者(例如患者)的现有方法和装置在至少一些情况下可能导致不太理想的组织去除。例如,前列腺手术的现有方法在至少一些情况下可能导致比理想的更长的治愈时间和欠佳的结果。
7.对组织成像的现有方法和装置对于对经处理的组织成像可能是不太理想的。例如,现有的超声方法和装置可能不是非常适合于在处理期间观察处理部位,以及诊断图像与处理图像的对准可能是不太理想的。此外,处理组织的至少一些现有处理方法和装置可能不是非常适合于形成与现有技术的成像系统的组合。在至少一些情况下,在手术期间提供组织的改进的成像,例如提供组织的实时成像,将是有帮助的,组织的实时成像将允许用户基于组织的实时图像来调整处理。在手术期间对组织成像的至少一些现有方法和装置可能使用不便,并且在患者处理中可能导致延迟。
8.处理器官(例如前列腺)的现有方法和装置可能提供对于用户有些不方便的用户界面,并且可能提供不太理想的手术计划。此外,处理组织(例如前列腺组织)的至少一些现有方法和装置可能比理想情况稍微不准确。在至少一些情况下,现有方法和装置可能提供不太理想的用户体验。此外,至少一些现有界面可能提供处理装置与组织结构的不太理想的耦合。
9.用机器人器械处理组织的现有方法和装置可能在处理期间是不太理想的。机器人手术系统的机器人臂和外科手术探针可以在处理之前彼此对准和与患者对准。在一些情况下,机器人臂和外科手术探针在它们耦合到彼此并被锁定就位之前首先手动地被移动和定位,以用于进一步的基于控制器的调整。例如,耦合到机器人臂的外科手术探针或其他工具可以穿过解剖结构手动地被引导以例如在经直肠超声(“trus”)的情况下通过肛门和直肠或者通过尿道、前列腺和膀胱颈的曲折路径(曲折路径涉及穿过敏感解剖结构的急转弯)到达目标部位。在至少一些情况下,在手动调整之后和在处理期间的机器人臂的期望对准和稳定性的维持可能是不太理想的。例如,现有的机器人臂和末端外科手术探针可能太僵硬地被保持(held)——这可能潜在地导致与患者移动相关的组织损伤,或者可能以不太理想
的支撑强度被保持——这可能导致如果机器人臂和外科手术探针例如当在耦合之后被碰撞或从用户的抓握被释放时被干扰而与目标部位的不太理想的对准。
10.与本公开相关的工作表明,使探针与机器人臂对准的现有方式在至少一些情况下可能是不太理想的。
11.虽然这些前面提到的方法和装置可能是非常有效的并且可能代表了在现有的腔组织处理方式方面的显著进步,但是在全自动操作模式和医生辅助操作模式中提供有助于更准确的组织去除的改进将是合乎需要的。在下文中描述的发明将实现这些目标中的至少一些。
12.概述
13.本公开的实施例提供了用于执行组织处理(例如组织切除)的改进的方法和装置。在一些实施例中,一种图像引导的处理系统包括处理探针和成像探针。成像探针可以被配置成在处理探针执行对目标组织的切除时提供目标部位的图像。在一些实施例中,处理探针和成像探针各自在一个或更多个计算设备的控制下耦合到机器人臂。处理探针可以耦合到第一机器人臂,该第一机器人臂被配置为在用处理探针进行组织切除期间提供处理探针的计算机控制的移动。成像探针可以耦合到第二机器人臂,该第二机器人臂被配置为在用成像探针扫描目标部位期间、在用处理探针进行组织切除过程之前和/或期间提供成像探针的计算机控制的移动。一个或更多个计算设备可以被配置为执行用于在被动模式中操作机器人臂的指令,在被动模式中机器人臂被配置为手动地被调整以将处理探针和成像探针定位到手动设置定位,例如用于对相同或不同的组织部位成像和在相同或不同的组织部位上的处理。一个或更多个计算设备可以被配置为执行用于在机器人臂从手动调整被释放之后维持探针的手动设置定位的指令。机器人臂可以被配置成在平移轴或旋转轴中的一个或更多个上以一定的中的一个或更多个维持手动设置定位。在一些实施例中,旋转角度被维持到5
°
内,以及平移定位被维持到在5mm内或更小。在一些实施例中,对于三个轴中的每一个都维持旋转角度和平移定位,这可以提高用探针成像和处理的准确度。
14.可操作地耦合到第一机器人臂和第二机器人臂的一个或更多个计算设备可以被配置成例如基于预先计划或编程的扫描轮廓或者根据各种预先编程的参数来自动控制处理探针和/或成像探针的移动。例如,处理探针沿着处理轮廓的自动控制的移动可以执行对目标部位的处理。例如,图像探针沿着成像轮廓的自动控制的移动可以生成目标部位的三维渲染。使用机器人臂用成像探针对目标部位进行的自动的、计算机控制的扫描也可用于为了额外的处理而生成关于目标部位的有用信息。例如,成像探针可以被配置为在切除过程之后执行对目标部位的彩色/多普勒扫描,以便找出在目标部位内的需要止血的出血部位。使用成像探针对目标部位进行的三维扫描也可以用于识别在目标部位处的组织异常,例如肿瘤。
15.可选地或附加地,一个或更多个计算设备可以被配置为响应于例如通过处理装置的图形用户界面的用户输入来控制处理探针和/或成像探针的移动。在一些实施例中,一个或更多个计算设备可以被配置成将处理探针和/或成像探针的移动限制在可允许运动范围内,该可允许运动范围可以在计算机控制下开始使用第一机器人臂或第二机器人臂之前被编程到第一机器人臂和/或第二机器人臂中。
16.第一机器人臂和/或第二机器人臂可以被配置成调整第一臂和/或第二臂的定位
和/或定向以维持处理探针和成像探针的适当定位或对准,和/或防止在患者的身体外部处理探针和成像探针之间的碰撞或干扰。
17.第一机器人臂和/或第二机器人臂可以包括一个或更多个反馈感测机构。例如,第一机器人臂和/或第二机器人臂可以与力传感器可操作地耦合,该力传感器被配置为检测在处理探针和/或成像探针前面的组织的压迫。一个或更多个计算设备可以包括响应于由传感器检测到的力而控制机器人臂的移动的指令,例如防止对前部组织的过度压迫以及所导致的对组织和/或探针的损坏的指令。另一示例性反馈感测机构可以包括与第一机器人臂和/或第二机器人臂可操作地耦合的定位和/或运动传感器。一个或更多个计算设备可以包括响应于由传感器检测到的定位和/或运动而控制机器人臂的移动的指令,例如响应于在处理和/或扫描过程期间的患者移动而调整处理探针和/或成像探针的定位的指令。
18.在涉及附图的下面的描述中,更详细地描述了这些实施例和其他实施例。
19.通过引用并入
20.在本说明书中提及的所有出版物、专利和专利申请在好像每个单独的出版物、专利或专利申请被特别地和单独地指示通过引用被并入的相同程度上通过引用被并入本文。
21.附图简述
22.本发明的新颖特征在所附权利要求中被特别地阐述。通过参考阐述其中利用本公开的原理的说明性实施例的下面的详细描述和附图将获得对本公开的特征和优点的更好的理解,在附图中:
23.图1示出了根据一些实施例的用于在患者体内执行组织切除的系统的前视图;
24.图2示意性地示出了根据一些实施例的用于在患者体内执行组织切除的系统;
25.图3a和图3b示出了根据一些实施例的用于支撑一个或更多个机器人臂的公共基座或底座的透视图;
26.图4a和图4b分别示出了根据一些实施例的用于在患者体内执行组织切除的包括可移动基座系统的透视图和侧视图;
27.图5a和图5b示出了根据一些实施例的在处理探针和第一机器人臂之间的耦合器的俯视图,其中图5a示出了未耦合的处理探针和第一机器人臂,以及图5b示出了耦合的处理探针和第一机器人臂;
28.图6示出了根据一些实施例的操作耦合到处理探针的机器人臂的方法的流程图;
29.图7示出了根据一些实施例的用于操作耦合到成像探针的机器人臂的方法;
30.图8a示出了根据一些实施例的在对患者的处理期间处理探针和成像探针的配置;
31.图8b是根据一些实施例的探针和机器人臂与力检测传感器的示意图;
32.图9a、图9b和图9c示意性地示出了根据一些实施例的处理探针轴与成像探针的矢状平面的对准;
33.图10示出了根据一些实施例的术野的术中图像,该术中图像包括对出血部位的识别;
34.图11a、图11b和图11c分别示出了根据一些实施例的用于在患者体内执行组织切除的系统的侧视图、前视图和透视图,该系统包括耦合到用于定位成像探针和处理探针的滑块和底座的系统的处理操作台;
35.图12示出了根据一些实施例的用于在患者体内执行组织切除的处理系统的透视
图,该系统包括移动推车,该移动推车具有显示器和用于致动成像探针和处理探针的机器人臂的公共机器人臂基座;
36.图13示出了根据一些实施例的用于执行组织切除的处理系统的透视图;
37.图14a、图14b和图14c示出了根据一些实施例的用于与处理系统一起使用的夹具的透视图;
38.图15a、图15b、图15c和图15d示出了根据一些实施例的用于与处理系统一起使用的夹具的内部透视图;
39.图16a、图16b、图16c和图16d示出了根据一些实施例的用于与处理系统一起使用的夹具的侧面内部视图;
40.图17a、图17b和图17c分别示出了根据一些实施例的夹紧系统的透视图、侧视图和透视图;
41.图18a和图18b示出了根据一些实施例的用于与处理系统一起使用的具有底座的横梁的透视图;
42.图19a和图19b示出了根据一些实施例的用于与处理系统一起使用的具有底座的横梁的透视图;
43.图20示出了根据一些实施例的控制手柄的透视图;
44.图21示出了根据一些实施例的成像探针和处理探针的平面图,成像探针和处理探针耦合到相应的控制手柄并显示了共面性;
45.图22示出了根据一些实施例的用于定位成像探针和处理探针的系统的透视图,该系统包括夹具、支架和机器人臂;
46.图23示出了根据一些实施例的用于定位成像和处理探针的系统的侧视图;
47.图24示出了根据一些实施例的处理系统的透视图,该处理系统包括轮式探针安装和调整组件;
48.图25示出了根据一些实施例的用于定位和校准一个或更多个探针的系统;
49.图26示出了根据一些实施例的耦合到护套的臂、耦合到处理探针的机器人臂和耦合到超声探针的臂;
50.图27示出了包括如图26所示的耦合到处理探针的机器人臂和耦合到护套的臂的系统。
51.图28a示出了将机器人臂耦合到处理探针的耦合器;
52.图28b示出了由如图28a中的耦合器提供的处理探针、内窥镜、冲洗腔和抽吸腔的移动;以及
53.图29示出了根据一些实施例的处理的方法。
54.详细描述
55.本公开的实施例提供了用于执行组织处理(例如组织切除(例如前列腺组织切除))的改进的方法和装置。本文公开的方法和装置非常适合于许多类型的外科手术过程,并且可以合并到许多现有系统和方法中。虽然本公开的一些实施例目的在于对前列腺的经尿道处理,但是本公开的一些方面也可以用于处理和改变(modify)其他组织和相关器官,例如脑、心脏、肺、肠、眼、皮肤、肾、肝、胰腺、胃、子宫、卵巢、睾丸、膀胱、耳、鼻、口、软组织(例如骨髓、脂肪组织、肌肉、腺和粘膜组织、脊髓和神经组织、软骨)、硬生物组织(例如牙
齿、骨)以及体腔和通道(例如鼻窦、输尿管、结肠、食道、肺通道、血管和喉咙)。本文公开的设备可以通过现有体腔被插入,或者通过在身体组织中产生的开口被插入。
56.本公开的方法和装置非常适合于用能量源处理多种类型的组织。例如,组织可以包括软组织(例如腺组织或包膜组织)或硬组织(例如骨)或堵塞物(例如肾结石)。能量源可以包括以下中的一个或更多个:激光束、水射流、电极、超声波、高强度聚焦超声波、机械振动、射频(rf)能量、超声换能器、微波能量、空化能量(cavitating energy)(例如空化水射流或超声空化)、辐射(例如来自放射性同位素的电离辐射)或来自电离电极的离子能量或来自等离子体电极的等离子体能量。例如,当前公开的方法和装置非常适合于执行碎石术以打碎肾结石。当前公开的方法和装置非常适合于用辐射(例如在处理探针上的放射性同位素)进行处理。例如,为了对癌症的处理,放射处理可以在探针上被提供,并用探针移除,或者从处理探针被植入。
57.在一些实施例中,一种图像引导的处理系统包括处理探针和成像探针。成像探针可以被配置成在处理探针执行对目标组织的切除时提供目标部位的图像。处理探针和成像探针各自可以在一个或更多个计算设备的控制下被耦合到机器人臂,以便使一个或两个臂的更精确地控制的移动成为可能,并提高使用处理系统进行的处理的安全性和效率。
58.机器人臂可以用多种方式被配置。与本公开相关的工作表明,trus探针可以在机器人臂上施加力。在一些实施例中,该力与来自患者的对抗探针的力相关。在一些实施例中,该力与为了改善成像的目的而由执业外科医生抵靠组织移动探针以及移动组织所引起的力或相对于预期处理的组织位置有关。探针的长度可以导致在机器人臂上的相对应的扭矩。
59.当前的发明人已经进行了实验来确定从trus探针可以施加到机器人臂上的力的量。例如,该力可以在患者体外的电机底座上被测量。该力的范围可以从0到大约5公斤,这取决于探针和患者的手术位置。在一些实施例中,从臂到与前列腺的接触点的距离对应于在臂上的扭矩的量。
60.根据本文公开的一些实施例,器械定位可以具有三类运动控制和能力。这三类运动大体包括:1)用于移动、储备(storage)和准备手术的粗略运动能力,2)用于使探针与患者对准并将探针插入患者体内的中间移动能力,以及3)对应于准确手术的位置容差的精细移动能力。
61.例如,粗略运动能力允许在操作台下方和相邻于操作台以及在患者定位期间储备。
62.例如当系统为患者进入做好准备并被定位时,中间运动允许器械相对于在手术支撑结构(例如手术室(“or”)操作台)上的患者进行定位。trus探针或任何合适的外科侵入式探针的典型位置范围具有用于插入患者体内的自由运动,该自由运动可以用x,y,z坐标系来描述。利用适当的坐标参考系,患者的腔的入口可以对应于在x,y,z坐标系中的0,0,0的值。坐标参考也可以包括x’,y’,z’的角坐标参考。腔的入口可以包括患者的肛门。在肛门入口处于0,0,0处且探针与患者轴共线的情况下,中间运动可以包括+/
‑
2至15cm的x运动容差、+/
‑
2至15cm的y运动容差和+/
‑
2至30cm的z运动容差。在一些实施例中,x和y运动对应于探针沿着x和y坐标参考的平移。z轴位置对应于沿着腔的轴的移动,并且可以对应于探针沿着身体腔的推进和缩回,例如进入和离开患者的平移移动。在有x’,y’,z’的角度调整的情
况下,角位置能力可以包括相对于患者的自然轴的x’+/
‑
0至30度、y’+/
‑
0至30度、z’+/
‑
0至30度。与本公开相关的工作表明,具有这些角度能力的探针可以由用户操纵以插入患者体内。
63.在一些实施例中,精细移动能力和容差对应于例如在组织切除和成像期间在探针被定位于患者体内的情况下机器人探针和臂的配置。当该系统与为了诊断和处理而被定位的器械一起使用时,本文所述的传感器和控件可以被配置成防止组织损伤,并且还定位处理探针和成像探针以获得可靠的图像,例如最佳图像,以及处理探针和成像探针可以被精确地定位并对抗组织压力牢固地被保持就位。x,y,z参考系可以以腔入口为中心处于0,0,0和(探针与患者轴线共线)。在一些实施例中,x运动容差为+/
‑
0至5cm;y运动容差为+/
‑
0至5cm;以及z运动容差为+/
‑
0到15cm。x和y运动大体上对应于探针的平移,以及z轴对应于探针在患者体内和离开患者的推进和缩回。x’、y’、z’的相对应的角度调整范围是相对于患者的自然轴(例如相对于患者的中线,且z轴沿着患者的中线延伸)的x’+/
‑
0到10度、y’+/
‑
0到10度和z’+/
‑
0到15度。虽然上述值表示运动范围,但是机器人臂和外科手术探针可以为探针的固定位置配置提供更严格的容差。例如,当探针预期被保持在固定位置时,旋转容差可以将x’,y’,z’中的一个或更多个维持在+/
‑5°
容差或更小的容差(例如+/
‑3°
)内。关于平移移动,例如对于x,y,z轴中的一个或更多个,手动设置定位可以被维持到5mm或更小、3mm或更小、或2mm或更小的位置容差。在一些实施例中,对于x,y,z和x’,y’,z’中的每一个,这些容差被维持。在一些实施例中,探针手动地被设置,并且平移和旋转容差被维持到上述值内,这可以提高组织处理和相关成像的准确度。例如,这些容差可以对应于其上安装有探针的臂的最大结构松弛或载荷。
64.探针可以用多种方式被操纵和插入患者体内。例如,探针可以手动地被操纵,以及机器人臂被移动为与探针对准并耦合到探针,探针当被用户释放时维持上述容差,并且臂随后支撑患者和探针的满载。臂可以手动地或用至少一些自动操作(其中传感器和引导电路用于使臂与由用户保持的探针对准)与探针对准。臂可以包括以6个自由度接合探针的耦合结构,使得在臂上的耦合结构可以与在探针上的耦合结构精确地对准。响应于检测到对准,耦合结构可以随后彼此接合和耦合。在一些实施例中,传感器被设置在臂或探针中的一个或更多个上以检测在臂和探针之间的对准,并且耦合结构响应于检测到的对准而被接合。机器人臂可以包括耦合到处理器的联接装置(linkage),其中处理器控制臂的移动,并使臂与由用户保持的探针对准。
65.在一些实施例中,尿道探针具有与trus探针相似的尺寸、运动和容差能力。
66.在一些实施例中,探针包括在从大约250克到1500克的范围内的质量,以及臂维持本文描述的容差,且探针包括在该范围内的质量。
67.如本文描述的机器人臂可以改善在处理探针和成像探针之间的对准,成像探针可以包括成像trus探针的矢状平面。例如,处理探针可以沿着成像探针的矢状平面基本上共面地被对准。这个共面性可以提供处理探针和成像探针的清晰成像和坐标对准。在一些实施例中,这个共面性的容差与处理探针的宽度和成像平面能力的宽度(例如用超声波束形成而捕获的图像的宽度)的组合有关。trus对处理探针的相对定位可以基本上是平行的,并且在角度容差内被对准。对准可以在从+/
‑
0度(平行)到大约30度的范围内。在一些实施例中,处理探针和trus探针的细长轴在基本上共面的配置中被对准,在探针之间的间隔距离
沿着成像探针和处理探针的长度变化。例如,处理探针的远侧顶端可以离trus探针更远,而近侧端更接近trus探针,其中这两个探针相对于彼此倾斜,但是基本上是共面的。在这两个探针之间的倾斜可以与每个独特的人的自然孔口的组织约束相关。在自然可用的孔口的入口之间的距离可以例如在从大约5cm到大约25cm间隔的范围内变化。
68.在一些实施例中,成像探针和处理探针对准,使得处理探针在成像探针的视野内。在一些实施例中,对准被配置成将处理探针维持在成像探针的视野内。在一些实施例中,处理探针被配置成移动到一个位置,并且成像探针被配置成将处理探针维持在视野内。
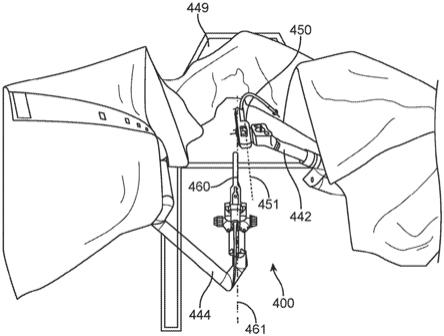
69.图1示出了用于在患者体内执行组织切除的系统400的示例性实施例。系统400可以包括处理探针450和成像探针460。处理探针450可以耦合到第一臂442,以及成像探针460耦合到第二臂444。第一臂442和第二臂444中的一个或两个可以包括机器人臂,机器人臂的移动可以由与臂可操作地耦合的一个或更多个计算设备控制。处理探针450可以包括用于从在患者体内的目标部位移除目标组织的设备。处理探针450可以被配置为将足以移除目标组织的能量从处理探针450输送到目标组织。例如,处理探针450可以包括电外科消融设备、激光消融设备、经尿道针消融设备、水射流消融设备或它们的任何组合。成像探针460可以被配置为将足以对目标组织成像的能量从成像探针460输送到目标组织。例如,成像探针460可以包括超声探针、磁共振探针、内窥镜或荧光透视探针。第一臂442和第二臂444可以被配置成是独立地可调整的、根据固定关系可调整的、根据用户选择的关系可调整的、独立地可锁定的或同时可锁定的或它们的任何组合。第一臂442和第二臂444可以具有多个自由度(例如六个自由度),以分别操纵处理探针450和成像探针460。处理系统400可以用于在患者的器官(例如患者的前列腺)中执行组织切除。患者可以被定位于患者支撑件449(例如床、操作台、椅子或平台)上。处理探针450可以沿着与处理探针的细长轴451重合的进入轴插入患者的目标部位内。例如,处理探针450可以被配置用于插入患者的尿道内,以便将处理探针的能量输送区域定位在患者的前列腺内。成像探针460可以沿着与成像探针的细长轴461重合的进入轴向患者体内插入在目标部位处或在相邻于患者的目标部位的部位处。例如,成像探针460可以包括被配置为插入患者的直肠内以观察患者的前列腺和周围组织的经直肠超声(trus)探针。如图1所示,第一臂442和第二臂444可以用无菌帷帘(sterile drapes)覆盖以提供无菌操作环境,维持机器人臂干净,并降低损坏机器人臂的风险。关于适合于并入如本文公开的实施例的系统400的各种部件的另外的细节可以在第7,882,841号美国专利、第8,814,921号美国专利、第9,364,251号美国专利和公开号为wo2013/130895的pct中找到,这些文件的全部公开内容通过引用被并入本文。
70.图2示意性地示出了用于在患者体内执行组织切除的系统400的示例性实施例。系统400包括处理探针450,并且可以可选地包括成像探针460。处理探针450耦合到控制台420和联接装置430。联接装置430可以包括机器人臂442的一个或更多个部件。成像探针460耦合到成像控制台490。例如,成像探针可以耦合到第二机器人臂444。患者处理探针450和成像探针460可以耦合到公共基座440。用患者支撑件449支撑患者。处理探针450用第一臂442耦合到基座440。成像探针460用第二臂444耦合到基座440。如在本文更详细描述的,第一臂442和第二臂444中的一个或两个可以包括机器人臂,机器人臂的移动可以由与臂可操作地耦合的一个或更多个计算设备控制。
71.虽然参考的是公共基座,但是机器人臂可以耦合到床轨(bed trail)、控制台或支
撑机器人臂的基座的任何合适的支撑结构。
72.在一些实施例中,系统400包括耦合到处理器423的用户输入设备496,以用于用户操纵在机器人臂上的手术器械。用户输入设备496可以位于任何合适的地方中,例如在控制台上、在机器人臂上、在移动基座上,以及可以有与系统400结合来使用的一个、两个、三个、四个或更多个用户输入设备以提供输入的冗余途径、唯一输入命令或组合。在一些实施例中,用户输入设备包括控制器以响应于用户输入设备的机械移动而在有移动的情况下移动处理探针或成像探针的端部。探针的端部可以显示在显示器425上,并且用户可以操纵探针的端部。例如,用户输入设备可以包括6自由度输入控制器,在6自由度输入控制器中用户能够以6个自由度移动输入设备,以及探针的远侧端响应于控制器的移动而移动。在一些实施例中,6个自由度包括三个平移自由度和三个旋转自由度。处理器可以例如被配置有用于使探针控制在利用能量源的自动图像引导处理和以用户输入设备的用户移动利用能量源的处理之间切换的指令。
73.患者被放置在患者支撑件449上,使得处理探针450和超声探针460可以被插入患者体内。患者可以以许多体位(例如俯卧、仰卧、直立或倾斜)中的一个或更多个体位来放置。在一些实施例中,患者被置于截石位上,并且例如箍筋(stirrups)可以被使用。在一些实施例中,处理探针450在患者的第一侧上在第一方向上插入患者体内,以及成像探针在患者的第二侧上在第二方向上插入患者体内。例如,处理探针可以从患者的前侧插入患者的尿道内,并且成像探针可以从患者的后侧经直肠插入患者的肠内。处理探针和成像探针可以被放置在患者体内,其中尿道组织、尿道壁组织、前列腺组织、肠组织或肠壁组织中的一个或更多个在处理探针和成像探针之间延伸。
74.处理探针450和成像探针460可以以许多方式中的一种或更多种插入患者体内。在插入期间,第一臂和第二臂中的每一个可以包括基本上解锁的配置,使得处理探针或成像探针可以很好地旋转和平移,以便将探针插入患者体内。当探针插入到期望位置时,臂可以被锁定。在锁定配置中,探针可以以许多方式中的一种或更多种相对于彼此被定向(例如平行、偏斜、水平、倾斜或不平行)。为了将成像探针的图像数据映射到处理探针坐标参考,如本文所述的利用角度传感器确定探针的定向可能是有帮助的。使组织图像数据被映射到处理探针坐标参考空间可以允许由操作者(例如医生)对为了处理而被识别的组织进行准确的瞄准和处理。
75.在一些实施例中,处理探针450耦合到成像探针460,以便基于来自成像探针460的图像来与处理探针450对准。如所示,可以用公共基座440实现所述耦合。可选地或组合地,处理探针和/或成像探针可以包括磁体以保持探针通过患者的组织对准。在一些实施例中,第一臂442是可移动和可锁定的臂,使得处理探针450可以被定位于在患者体内的期望位置上。当探针450已经被定位于患者的期望位置上时,第一臂442可以用臂锁427锁定。成像探针可以用第二臂444耦合到基座440,当处理探针被锁定就位时,第二臂444可以被用来调整成像探针的对准。例如,第二臂444可以包括在成像系统或控制台和用户界面的控制下的可锁定和可移动的探针。可移动臂444可以是可微致动的,使得成像探针460可以相对于处理探针450以例如1毫米左右的小移动进行调整。
76.在一些实施例中,处理探针450和成像探针460耦合到角度传感器,使得处理可以基于成像探针460和处理探针450的对准进行控制。第一角度传感器495可以用支撑件438耦
合到处理探针450。第二角度传感器497可以耦合到成像探针460。角度传感器可以包括许多类型的角度传感器中的一种或更多种。例如,角度传感器可以包括测角计、加速度计及它们的组合。在一些实施例中,第一角度传感器495包括三维加速度计以确定处理探针450在三个维度上的定向。在一些实施例中,第二角度传感器497可以包括三维加速度计以确定成像探针460在三个维度上的定向。可选地或组合地,第一角度传感器495可以包括测角计以确定处理探针450沿着处理探针的细长轴451的角度。第二角度传感器497可以包括测角计以确定成像探针460沿着成像探针460的细长轴461的角度。第一角度传感器495耦合到处理控制台420的控制器424。成像探针的第二角度传感器497耦合到成像系统490的处理器492。可选地或组合地,第二角度传感器497可以耦合到处理控制台420的控制器424。
77.控制台420包括耦合到在用于控制处理探针450的部件中的处理器系统的显示器425。控制台420包括具有存储器421的处理器423。通信电路422耦合到处理器423和控制器422。通信电路422经由成像控制台的通信电路494耦合到成像控制台490。控制台420的臂锁427可以耦合到第一臂442以锁定第一臂422或允许第一臂422自由地可移动以将探针450插入患者体内。
78.可选地,控制台420可以包括内窥镜426的部件,内窥镜426耦合到处理探针450的锚24。内窥镜426可以包括控制台420的和内窥镜与探针450一起可插入以处理患者的部件。
79.可选地,控制台420可以包括与处理探针450可操作地耦合的一个或更多个模块以控制利用处理探针进行的处理的方面。例如,控制台420可以包括以下中的一个或更多个:向处理探针提供能量的能量源22、实现被用于将处理探针锚定在目标处理部位处的气囊的膨胀的气囊膨胀控件26、控制探针的输注(infusion)和冲洗的输注/冲洗控件28、控制由探针进行的抽吸的抽吸控件30、控制目标处理部位(例如前列腺)的吹气的吹气控件32或者向处理探针提供光能的光源33(例如红外光、可见光或紫外光的源)。
80.处理器、控制器和控制电子器件和电路可以包括许多合适的部件中的一个或更多个,例如一个或更多个处理器、一个或更多个现场可编程门阵列(fpga)以及一个或更多个存储器存储设备。在一些实施例中,控制电子器件控制图形用户界面(在下文中的“gui”)的控制面板以根据用户指定的处理参数提供手术前计划以及提供用户对外科手术过程的控制。
81.处理探针450包括锚24。当能量用探针450被输送到能量输送区域20时,锚24可以锚定探针450的远侧端。探针450可以包括喷嘴200。
82.处理探针450可以用联接装置430耦合到第一臂442。联接装置430可以包括例如基于患者的图像将能量输送区域20移动到患者的期望目标位置的部件。联接装置430可以包括第一部分432、第二部分434和第三部分436。第一部分432可以包括基本上固定的锚定部分。基本上固定的锚定部分432可以固定到支撑件438。支撑件438可以包括联接装置430的参考框架。支撑件438可以包括刚性底盘或框架或壳体以将第一臂442刚性地和牢固地耦合到处理探针450。第一部分432可以保持基本上固定,而第二部分434和第三部分436可以移动以将能量从探针450引导到患者。第一部分432可以固定到离锚24基本上恒定的距离437。在锚24和联接装置的固定的第一部分432之间的基本上固定的距离437允许处理被准确地放置。第一部分432可以包括线性致动器以沿着处理探针450的细长轴451将在能量输送区域20中的高压喷嘴200准确地定位在期望的轴向定位处。
83.处理探针450的细长轴451总体上在探针450在联接装置430附近的近侧部分到使锚24附接到其的远侧端之间延伸。第三部分436可以控制围绕细长轴451的旋转角度453。在对患者的处理期间,在能量输送区域20和联接装置的第一部分432之间的距离439可以相对于锚24而变化。距离439可以响应于计算机控制以方式418调整以沿着以锚24为基准的处理探针的细长轴451设置目标位置。联接装置的第一部分保持固定,而第二部分434沿着轴451调整能量输送区域20的定位。联接装置436的第三部分响应于控制器424而调整围绕轴的角度453,使得在处理的角度下沿着轴的距离可以相对于锚24非常准确地被控制。探针450可以包括刚性构件,例如在支撑件438和锚24之间延伸的针(spine),使得从联接装置430到锚24的距离在处理期间保持基本上恒定。如本文所述,处理探针450耦合到处理部件以允许用一种或更多种形式的能量(例如来自射流的机械能、来自电极的电能或来自光源(例如激光源)的光能)进行处理。光源可以包括红外光、可见光或紫外光。能量输送区域20可以在联接装置430的控制下移动,以便将预期形式的能量输送到患者的目标组织。
84.成像控制台490可以包括存储器493、通信电路494和处理器492。在相对应的电路中的处理器492耦合到成像探针460。臂控制器491耦合到臂444以精确地定位成像探针460。成像控制台还可以包括显示器425。
85.为了便于在对患者的处理期间对处理探针和/或成像探针的精确控制,处理探针和成像探针中的每一个可以耦合到机器人的、计算机可控的臂。例如,参考图2所示的系统400,耦合到处理探针450的第一臂442和耦合到成像探针460的第二臂444中的一个或两个可以包括机器人的、计算机可控的臂。机器人臂可以与被配置成控制机器人臂的移动的一个或更多个计算设备可操作地耦合。例如,第一机器人臂442可以与控制台420的处理器423可操作地耦合,或者第二机器人臂444可以与成像控制台490的处理器492和/或控制台420的处理器423可操作地耦合。一个或更多个计算设备(例如处理器423和492)可以包括用于控制一个或更多个机器人臂的移动的计算机可执行指令。第一机器人臂和第二机器人臂在构造和功能方面可以是基本上相似的,或者它们可以是不同的以适应用于控制处理探针与成像探针的移动的特定功能需求。
86.机器人臂可以包括6个或7个或更多个接头以允许臂在计算机控制下移动。合适的机器人臂是在市场上从多个制造商(例如robodk公司、kinova公司和多个其他制造商)可购得的。
87.可操作地耦合到第一机器人臂和第二机器人臂的一个或更多个计算设备可以被配置成自动控制处理探针和/或成像探针的移动。例如,机器人臂可以被配置成根据一个或更多个预先编程的参数在对患者的处理期间自动调整处理探针和/或成像探针的定位和/或定向。机器人臂可以被配置成沿着预先计划或编程的处理或扫描轮廓自动移动处理探针和/或成像探针,该预先计划或编程的处理或扫描轮廓可以存储在一个或更多个计算设备的存储器中。可选地或附加地,对机器人臂的自动调整,一个或更多个计算设备可以被配置为响应于(例如通过处理装置的图形用户界面的)用户输入来控制处理探针和/或成像探针的移动。可选地或附加地,对机器人臂的自动调整,一个或更多个计算设备可以被配置为响应于实时定位信息,例如响应于在由成像探针或其他成像源捕获的一个或更多个图像中识别的解剖结构(处理探针和/或成像探针的可允许运动范围可以从该解剖结构被建立)和/或来自耦合到探针和/或机器人臂的一个或更多个传感器的处理探针和/或成像探针的定
位信息,控制处理探针和/或成像探针的移动。
88.图3a和图3b示出了用于支撑如本文公开的图像引导的处理系统的一个或更多个机器人臂的公共基座或底座440的示例性实施例。图3a示出了包括一个或更多个轨道(rails)452的患者支撑件449。患者支撑件449可以包括手术操作台或平台。与处理探针或成像探针中的一个或更多个相关联的一个或更多个机器人臂可以被安装到轨道452上,使得轨道起公共基座440的作用。图3b示出了公共基座440包括落地支撑件454,落地支撑件454被配置为耦合到连接到处理探针的第一机器人臂和/或连接到成像探针的第二机器人臂。落地支撑件454可以在处理过程期间被定位于患者的腿之间。
89.图4a和图4b示出了如本文所述的包括移动基座470的处理系统400的示例性实施例。图4a是处理系统400的前视图以及图4b是处理系统400的侧视图。处理系统400包括耦合到第一机器人臂442的处理探针450和耦合到第二机器人臂444的成像探针460。第一机器人臂442和第二机器人臂444每个包括近侧端和远侧端,远侧端分别耦合到处理探针450和成像探针460,以及近侧端耦合到包括移动基座470的公共基座440。第一机器人臂442可以包括耦合到处理探针450的第一臂耦合结构504,以及第二机器人臂444可以包括耦合到成像探针460的第二臂耦合结构505。处理探针450可以经由附接设备500耦合到第一机器人臂442的远侧端,附接设备500可以包括被配置为实现如本文所述的处理探针的移动(例如旋转、平移、俯仰等)的联接装置。处理探针450到第一机器人臂442的耦合可以是固定的、可释放的或用户可调整的。类似地,成像探针460到第二机器人臂444的耦合可以是固定的、可释放的或用户可调整的。
90.第一机器人臂442可以在一个或更多个第一臂接头443处铰接。成像臂444可以在一个或更多个第二臂接头445处铰接。每个臂接头443或445可以与计算机可控制的致动器(例如步进电机)可操作地耦合以实现在接头处的移动。每个臂接头443或445可包括多种运动接头中的一种,所述多种运动接头包括但不限于棱柱形、后旋、平行圆柱形、圆柱形、球形、平面、边缘滑块、圆柱形滑块、点滑块、球形滑块或交叉圆柱形接头或它们的任何组合。此外,每个臂接头443或445可以包括线性、正交、旋转、扭转或后旋接头或它们的任何组合。
91.如本文所述,系统400还可包括控制台420,其可由与移动基座470分离的移动支撑件480支撑。控制台420可以经由电力和通信线缆475与移动基座470可操作地耦合以允许对经由第一机器人臂耦合到移动基座的处理探针450的控制。处理控制台420包括处理器和存储器(存储器具有用于由处理器执行的存储在其上的计算机可执行指令)以控制处理控制台的各种模块或功能,例如能量源、输注/冲洗控制、抽吸控制和如在本文参考图2所述的其他部件。处理控制台420还可以包括与处理器通信的显示器425。显示器425可以被配置为显示例如下列项中的一项或更多项:受验者生命体征,例如心率、呼吸率、温度、血压、氧饱和度或任何生理参数或它们的任何组合;手术过程的状态;来自一个或更多个视图的处理部位的一个或更多个先前拍摄的图像或图像序列;由成像探针460获取的来自一个或更多个视图的处理部位的一个或更多个实时图像或图像序列;一组处理参数,包括但不限于处理模式(例如切割或凝固)、处理强度、在处理期间过去的时间、在处理期间剩余的时间、处理深度、已被处理的处理部位的面积或体积、将被处理的处理部位的面积、将不被处理的处理部位的面积或体积、处理探针450或成像探针460或两者的位置信息;处理调整控制,例如调整处理深度、处理强度、处理探针450的位置和/或定向、成像深度或成像探针460的位置和/
或定向或它们的任何组合的手段;或系统配置参数。
92.移动基座470还可以包括一个或更多个计算设备以控制一个或更多个机器人臂的操作。例如,移动基座可以包括处理器和存储器,存储器具有存储在其上的用于由一个或更多个处理器执行的计算机可执行指令。存储器可以具有存储在其上的用于操作耦合到移动基座的一个或更多个机器人臂的指令。处理器可以经由合适的机电部件与机器人臂可操作地耦合以实现机器人臂的移动。例如,机器人臂的一个或更多个接头中的每一个可以包括步进电机,以及处理器可以在每个接头处与步进电机可操作地耦合以在指定方向上将电机致动指定增量。可选地,一个或更多个机器人臂可以与控制台420的一个或更多个处理器或单独的成像控制台(例如图2所示的成像控制台490)可操作地耦合,其中一个或更多个控制台处理器可以被配置为执行用于控制一个或更多个机器人臂的移动的指令,并且可以经由通信电路(例如图2所示的控制台420的通信电路422或控制台490的通信电路494)将指令传递到机器人臂。用于控制机器人臂的移动的计算机可执行指令可以被预先编程并被存储在存储器中,或者可以在使用处理系统处理患者之前或期间由用户经由一个或更多个用户输入来提供。
93.与第一机器人臂和/或第二机器人臂可操作地耦合的一个或更多个计算设备可以被配置成控制臂的移动,以便沿着目标部位调整处理探针和/或成像探针的俯仰、偏航、滚转和/或线性定位。
94.移动基座470可以包括一个或更多个用户输入设备以使用户能够在计算机指令下控制机器人臂的移动。例如,如图4a和图4b所示,移动基座可以包括键盘474和/或脚踏开关471,脚踏开关经由脚踏开关线缆472与移动基座可操作地耦合。键盘474和脚踏开关471可以独立地或组合地被配置成例如经由一个或两个机器人臂在一个或更多个接头处的铰接来控制第一机器人臂442和/或第二机器人臂444的操作。键盘和脚踏开关可以与被配置成控制机器人臂的移动的一个或更多个处理器通信。当用户将指令输入到键盘和/或脚踏开关内时,用户指令可以由一个或更多个处理器接收,被转换成电信号,并且电信号可以被传输到与一个或更多个机器人臂可操作地耦合的一个或更多个计算机可控致动器。键盘和/或脚踏开关可以控制一个或两个臂朝向或远离处理定位、感兴趣的定位、预定位置或用户指定位置或它们的任何组合的移动。
95.可选地,键盘474和脚踏开关471可以独立地或组合地被配置成控制处理探针450和/或成像探针460的操作。例如,键盘474和/或脚踏开关471可以被配置成开始、停止、暂停或重新开始用处理探针进行的处理。键盘474和/或脚踏开关471可以被配置成开始对由成像探针以前或当前获取的图像或图像序列成像或冻结(freeze)、保存或在显示器425上显示。
96.移动基座470和控制台420的移动支撑件480可以独立地定位在由患者支撑件449(例如平台)支撑的患者周围。例如,支撑第一机器人臂和第二机器人臂以及处理探针和成像探针的移动基座470可以被定位于患者的腿之间,而支承控制台420和显示器425的移动支撑件480可以被定位到患者的侧面,例如靠近患者的躯干。移动基座470或移动支撑件480可以包括使基座或支撑件能够移动的一个或更多个可移动元件,例如多个轮子。移动基座470可以在整个处理过程期间用无菌帷帘覆盖,以便防止污染和流体进入。
97.图5a
‑
5b示出了在处理探针450和第一机器人臂442之间的示例性耦合器。图5a示
出了从机器人臂去耦的处理探针。图5b示出了耦合到机器人臂的处理探针。如所示,处理探针450可以用附接设备500耦合到机器人臂442,附接设备500可以包括可重复使用的电机组。处理探针450可以可移除地耦合到附接设备500。附接设备还可以包括被配置为耦合到机器人臂并将附接设备锁定在适当位置上的连接器502。机器人臂442可以包括被配置成锁定地接收附接设备500的连接器502的、被布置在臂的远端处的耦合结构504。一旦处理探针和机器人臂耦合在一起,处理探针的移动就可以通过移动机器人臂(例如,通过在计算机控制下铰接机器人臂的一个或更多个接头)来进行控制。
98.在一些实施例中,处理探针经由快速释放机构耦合到机器人臂,使得在探针和机器人臂之间的耦合能够快速断开,以便在机器人臂失去定位或其他未能正确地操作的情况下防止对患者的伤害。处理探针和机器人臂可以以许多方式(例如机械地(例如扫帚夹(broom clip))和/或磁性地)耦合到彼此。例如在图5a和图5b所示的实施例中,耦合结构504可以包括槽506,槽506具有被布置在其中的磁体508,以及连接器502可以包括被配置为安装在槽506内以接合磁体508的铁磁固定装置。耦合结构504还可以包括闭锁机构510以选择性地使连接器502与磁体508接合或分离。例如,如图5a和图5b所示,闭锁机构510可以包括可以旋转以实现耦合结构504的磁体508与附接设备500的连接器502的接合的可旋转旋钮。闭锁机构可以自动地或由用户手动地接合或分离以分别将附接设备500和因而将耦合到其的处理探针450耦合到机器人臂442或从机器人臂442去耦。在一些实施例中,耦合结构504可以与被配置为控制机器人臂的一个或更多个计算设备可操作地耦合,并且一个或更多个计算设备可以包括当在机器人臂的操作中检测到错误时释放耦合结构与探针的耦合的指令。
99.在一些实施例中,第一机器人臂442可以被配置成响应于来自附接设备500或耦合结构504中的一个或更多个的传感器位置数据来自动定位处理探针450。例如,第一机器人臂442可以在“寻找(seek)”模式中被操作以定位附接设备500。在一些实施例中,探针包括一个或更多个基准目标,以及机器人臂包括具有足够分辨率和定位的相对应的传感器以识别探针在3d空间中的相对位置。在一些实施例中,处理器被配置有用于执行以下操作的指令:当用户保持探针时,例如当探针被定位在患者体内时,用在机器人臂上的安装结构寻找处理探针或成像探针。
100.在机器人臂(例如第一机器人臂442)上的传感器和在探针(例如处理探针)上的传感器可以以多种方式被布置,例如,如图8b所示。
101.处理器可以耦合到在机器人臂的端部附近或在探针上的传感器以在寻找以接合在臂上的探针的时候在机器人臂的移动期间动态地更新相对位置。在机器人臂上的传感器可以包括多个传感器,该多个传感器包括以下中的一种或更多种:电容式、电容式位移、多普勒、电感式、磁性、光学、雷达、声纳、超声波或霍尔效应传感器,以便确定在机器人臂和探针之间的相对距离。在一些实施例中,探针包括多个目标,并且传感器被配置成响应于离多个目标的距离,生成信号。可选地或组合地,传感器可以位于探针和在机器人臂上的目标上。在一些实施例中,传感器包括紧密接触机械传感器以确认在机器人臂上或在臂附近的探针的对接,例如当探针和臂在与彼此对接的几毫米内时感测探针相对于机器人臂的定位。紧密接触机械传感器可以包括以下中的一个或更多个:微动开关、触须型触摸传感器或针孔接触开关。在一些实施例中,探针和机器人臂包括集成锁定机构以在最终接触定位处
提供非移动锁定接合。如本领域中的普通技术人员将理解的,集成锁定机构可以包括以下中的一个或更多个:磁性元件、电磁元件、撞锁、螺钉(例如多圈锁紧螺钉(multi turn latching screw)或四分之一圈锁紧螺钉(quarter turn locking screw))、真空或可逆附接的其它机械装置。
102.在一些实施例中,使用多个传感器,例如针对在探针和机器人臂之间的近间隔距离的一个或更多个传感器、针对在探针和机器人臂之间的中等间隔距离的一个或更多个传感器以及针对在探针和机器人臂之间的远间隔距离的一个或更多个传感器。粗略位置传感器可用于确定探针的大致位置(例如信标)。一个或更多个传感器可以用于探针相对于机器人臂的精细位置定位,例如接近传感器。在一些实施例中,在探针上的一个或更多个标志以相机和机器视觉检测一个或更多个标志来被使用。
103.在一些实施例中,可以提供粗略位置传感器,该粗略位置传感器可以是红外(ir)信标,其实现粗略定位空间位置,以用于机器人臂到探针的自导检测(homing detection)。在一些情况下,与可能依赖于基准点的视觉识别的传感器相比,自导(homing)信标(例如ir信标)允许跨越更大的距离的自导。
104.在一些实施例中,对接检测传感器确认机器人臂已经接合或极接近探针。作为示例,霍尔效应传感器可以与永磁体结合来使用以实现传感器输出。在一些实施例中,霍尔效应传感器是抗噪声的、非接触的,并且具有始终如一的检测范围(consistent detection range)。许多不同类型的霍尔传感器中的任一种可以被利用,并且在许多情况下传感器起简单的开关和线性范围测量和检测的作用,其中总输出电压由电源电压设置并且与磁场的强度成比例地变化。这导致在传感器和定位磁体之间的距离测量,并且可以用于测量在机器人臂和探针之间的距离,并且有助于对接。传感器和信标可以位于机器人臂和探针的相应壳体内。
105.在一些实施例中,机器人臂的定位感测由可以包括多达9轴检测的惯性测量单元(imu)执行。在一些情况下,6轴imu可用于运动检测、振动检测、定位定向信息、可能位于机器人臂的接头中的主编码器信号的冗余和备份。如在本文所述,imu可以执行寻找探针以用于与机器人臂对接以及力检测和运动补偿的双重功能。所描述的传感器可以与本文描述的任何机器人臂或探针结合来使用。
106.根据一些实施例,用于将机器人臂与探针对接的过程可以包括提供粗略定位和空间位置以用于自导检测的ir信标、在臂或者探针上的基准点和观察基准点(其可以用于允许在xy平面中的定位位置的精细对准)的光学传感器以及检测关于对接的z方向接近度的霍尔效应传感器。ir信标允许对机器人臂相对于探针的原始定位的更大距离寻找。基准点和光学传感器可以允许有由机器人臂对探针的2d位置和2d定向的快速、低时延检测。可以位于机器人臂上、探针上或机器人臂控制单元上的用户界面可以指示距离、定位、对接状态或其他信息。在一些实施例中,用户界面包括一个或更多个视觉提示,例如led指示器,以指示臂和探针的相对定位和/或对接状态。
107.虽然图5a和图5b所示的耦合机构是在将处理探针耦合到第一机器人臂的背景下进行的描述,但是基本上类似的机构也可以用于将成像探针耦合到第二机器人臂444。例如,第二机器人臂444的耦合结构可以包括用于接合连接到成像探针的附接设备的类似的耦合机构。
108.图6示出了根据一些实施例的用于操作耦合到处理探针的机器人臂的方法600。
109.在步骤605,处理探针手动地、半自动地或自动地被插入患者体内,机器人臂在患者的一侧待命。例如,对于前列腺组织切除系统,处理探针可以朝着前列腺手动地插入患者的尿道内。处理探针可以被操纵为其被推进以跟踪尿道、前列腺和膀胱颈的曲折路径。在进入尿道之后,处理探针可以在进一步推进穿过尿道球之前被转动(例如90度)。可以向用户提供执行这样的转动的指令,或者在插入是自动或半自动的情况下,可以指示机器人臂响应于图像、定位和/或力反馈数据而进行这样的转动。在一些实施例中,处理探针与成像探针同时或在成像探针之后插入患者体内,并且在一些情况下,处理探针插入可以根据来自被插入的图像探针的图像数据引导。
110.在步骤610,机器人臂耦合到处理探针。当机器人臂维持在被动或“零重力”模式中时,用户可以如在本文所述的手动地使机器人臂耦合结构与处理探针的附接设备对准。附接设备和机器人臂的耦合结构可以耦合在一起以将机器人臂附接到处理探针。
111.在步骤615,机器人臂的可允许运动范围被编程。例如,当在机器人臂仍然在被动模式中的情况下探针连接到机器人臂时,用户可以手动地移动、旋转处理探针和改变处理探针的角度以设置处理探针的可允许运动范围的界限。用户可以基于膀胱镜检查、超声波和触觉反馈的组合来设置界限。可选地,界限可以基于解剖结构,例如解剖模型或组织状况。与机器人臂可操作地耦合的处理器可以检测和存储可允许运动范围的界限,使得机器人臂在切换到主动模式时可以使用这些界限来避免移动到可允许运动范围之外。
112.在一些实施例中,处理探针手动地被插入阴茎尿道内,并被放置成在远侧端越过中叶约1cm且在患者的膀胱内。探针可以例如用超声波(例如trus探针)被成像。探针的图像可以显示探针被手动地定位在患者解剖结构中的最终位置附近,例如在膀胱内越过中叶大约1cm。在一些实施例中,运动范围由执业医生通过以下操作手动地校准:操纵探针平行于初始插入的角度,在耻骨或尿道弓中向上对接处理探针,并将运动限制成在x平面中横向上从约3mm至约5mm的范围内、在y平面中向下从约0mm至约10mm的范围内。关于(进入和离开患者的)z平面的经训练的运动将被设置为朝着患者向内零cm和从患者完全抽出。例如,30cm探针可以缩回多达30+cm以将它从患者移除,且如果调整针对临床处理的有效区域则缩回少得多。有角度地,如从医生的完全插入定位起测量,在患者体内的安全运动范围取决于解剖结构,例如组织弹性和骨结构。例如,在骨盆凹口骨结构处用支点进行的角度定位的示例,可允许角度运动范围可以被设置为在横向x方向上从大约0度到大约+/
‑
5度的范围内,在沿着y平面的竖直方向上从大约0度到+/
‑
25度的范围内,或者在这些范围内的运动的组合取决于患者的解剖结构。
113.可选地或附加地,响应于对例如来自成像探针或其他成像源(例如膀胱镜、外部超声源、ct扫描仪、mri系统、荧光镜成像系统等)的目标部位的图像数据的自动分析,可以用一个或更多个系统处理器自动或半自动地确定处理探针的可允许运动范围的界限。图像数据可以实时地被生成。例如,可以指示一个或更多个系统处理器来在图像数据中识别解剖结构(例如前列腺、外括约肌、精阜、膀胱颈等)并在一些情况下识别处理探针和/或成像探针,并作为响应确定可允许运动范围的界限。可选地或附加地,响应于来自在处理探针和/或处理探针机器人臂上的一个或更多个定位和/或力传感器的处理探针的定位和/或力反馈数据,可以用一个或更多个系统处理器自动或半自动地确定处理探针的可允许运动范围
的界限。例如,在处理探针和/或处理探针机器人臂上的一个或更多个力传感器可以提供组织压力数据,组织压力数据可以指示探针推进比较受抵抗的区域,并且可以呈现组织损伤的风险。
114.在一些实施例中,在机器人臂内的接头传感器包括力反馈传感器以检测作用于插入患者体内的探针的力。可选地或组合地,耦合到处理器的传感器可以位于一个或更多个探针处或在探针和机器人臂之间的接口处。例如,在探针内的探针传感器可以感测在探针的远侧端附近的压力。处理器可以被配置有用于执行以下操作的指令:响应于感测到的远侧压力而平移或旋转地调整探针的远侧端。传感器可以包括沿着探针定位的一个或更多个多平面应变计元件以感测抵靠组织的探针的压力。处理器可以被配置有用于执行以下操作的指令:实现阈值限制以避免不期望的组织损伤。多平面应变计元件可以包括以下中的一个或更多个:电导薄膜传感器、半导体传感器、压电电阻器、基于纳米颗粒的应变传感器、电容传感器、光学环形谐振器、光纤传感器或在弹性体中的导电流体。在一些实施例中,探针轴杆包括弹簧常数和在沿着轴杆的周期性位置处的嵌入式应变计以测量弯曲度和在沿着轴杆的特定点处的轴向压力。这些传感器测量可以与臂接头传感器组合。在一些实施例中,处理器被配置有用于执行以下操作的指令:识别压力阻力源,例如以下中的一个或多个:与对骨骼的接近度相关的骨约束、坚韧的组织进入支点或探针的远侧顶端是否被迫压靠内部解剖组织。可选地或组合地,在探针上的探针可以包括具有与压力传感器耦合的被暴露“接触区域”的弹性管状护套,压力传感器报告来自元件(例如在探针周围的环、线性侧结构或在探针的远侧端附近的按钮传感器元件)的信息。
115.在步骤620,通过用户输入在计算机控制下操纵机器人臂。用户可以经由被提供到图像引导的处理系统的图形用户界面的输入(例如,通过如本文所述的处理控制台提供的用户界面软件)来操纵机器人臂运动。例如,用户可以实现处理探针的旋转、平移和/或俯仰角的调整。当在主动模式中时,机器人臂可以被配置为仅在如在步骤615中设置的可允许运动范围的界限内移动。机器人臂当在主动模式中时可以被配置为从患者体内缩回处理探针,但是不将处理探针推进到患者体内,以确保患者的安全性;探针到患者体内的任何推进可以由用户手动地执行。在探针的缩回期间,机器人臂可以被编程为将探针维持在线性轨道上,使得探针的z轴定位维持基本上恒定。机器人臂和处理探针可以在计算机控制下被操纵以执行处理方案,该处理方案可以是自动化的。在一些实施例中,基于来自成像探针或其他成像源的图像数据来自动计划组织切除过程。例如,可以指示一个或更多个系统处理器来识别前列腺或其其他相关解剖结构,响应于解剖结构和探针的位置而生成处理方案,并允许用户在处理方案通过操纵机器人臂和/或处理探针而被实现之前修改和/或接受处理方案。
116.在步骤625,机器人臂在计算机控制下被自动操纵以调整处理探针的定位。可以根据预先编程的参数、用户指令、实时反馈(例如来自成像、定位和/或力反馈数据)或它们的组合来调整处理探针的定位。例如,成像系统可以被配置成例如基于用超声成像探针获得的目标部位的超声图像,使用智能图像识别,来在处理期间检测处理探针的位置。基于处理探针的检测到的位置,可以自动操纵机器人臂以调整处理探针的定位和/或定向,以便使处理探针与患者的目标组织和/或成像探针对准和/或以便补偿患者移动。
117.在步骤630,处理探针从机器人臂去耦。当处理过程完成时,用户可以使处理探针
从机器人臂分离,手动地将机器人臂移动到一侧,且然后从患者移除处理探针。
118.可以用如本文所述的电路(例如本文所述的系统的处理器或逻辑电路中的一个或更多个)来执行方法600的一个或更多个步骤。电路可以被编程为提供方法600的一个或更多个步骤,并且程序可以包括存储在计算机可读存储器上的程序指令或例如具有可编程阵列逻辑或现场可编程门阵列的逻辑电路的所编程的步骤。
119.尽管上述步骤示出了根据一些实施例的操作耦合到处理探针的机器人臂的方法600,但是本领域中的普通技术人员将认识到基于本文描述的教导的许多变形。例如,可以按不同的顺序来完成步骤。可以添加或省略一个或更多个步骤。一些步骤可以包括子步骤。许多步骤可以每当必要时或期望时被重复。
120.图7示出了根据一些实施例的用于操作耦合到成像探针的机器人臂的方法700。
121.在步骤705,成像探针手动地、半自动地或自动地被插入患者体内,机器人臂在患者的一侧待命。例如,对于图像引导的前列腺组织切除系统,成像探针可以包括trus探针,并且可以手动地被插入患者的直肠内。在一些实施例中,成像探针与处理探针同时或在处理探针之前被插入。成像探针可以沿着横向平面提供一个或更多个图像。成像探针可以沿着矢状平面提供一个或更多个图像,该一个或更多个图像可以在成像探针(和/或在成像探针内的成像换能器)被推进和/或缩回时被生成。横向和/或矢状图像可以被组合以生成三维图像。
122.在步骤710,机器人臂耦合到成像探针。例如,机器人臂和成像探针可以使用与在本文参考处理探针描述的耦合机构基本上类似的耦合机构耦合在一起。
123.在步骤715,机器人臂的可允许运动范围被编程。例如,当在机器人臂仍然在被动模式中的情况下探针连接到机器人臂时,用户可以手动地移动、旋转成像探针和改变成像探针的角度以设置成像探针的可允许运动范围的界限。用户可以基于膀胱镜检查、超声波和触觉反馈的组合来设置界限。
124.在一些实施例中,探针被手动地定位在患者的直肠解剖结构中的最终位置附近。例如,运动范围由执业医生基本上平行于初始插入角度操纵探针来手动地校准。执业医生在可允许运动范围(例如具有沿着横向x平面或竖直y平面中的一个或更多个从大约3cm到大约5cm的范围内的界限的可允许运动范围)内移动所插入的探针。在一些实施例中,执业医生沿着z平面移动探针(进入和离开患者)。在一些实施例中,沿着z平面的运动范围可以在从朝着患者向内0cm(零,以避免机器人无意造成的直肠损伤)到从患者完全抽出的范围内。例如,10cm探针可以缩回10+cm以将它从患者移除。在从医生的完全插入定位起有角度地测量时,在患者体内的安全运动范围取决于解剖结构,例如组织弹性和骨结构。在组织表面处(或者可选地在由骨结构限定的平面处)用支点进行的探针的角度定位的示例,可允许运动范围可以被设置为从0度到大约+/
‑
15度,例如在x或y平面中的一个或更多个中从大约0度到大约+/
‑
30度。在一些实施例中,角度界限可以包括对应于跟踪在这些界限内的圆锥形的运动的组合。
125.与机器人臂可操作地耦合的处理器可以检测和存储可允许运动范围的界限,使得机器人臂在切换到主动模式时可以使用这些界限来避免移动到可允许运动范围之外。可选地或附加地,响应于对例如来自成像探针或其他成像源(例如膀胱镜、外部超声源、ct扫描仪、mri系统、荧光镜成像系统等)的目标部位的图像数据的自动分析,可以用一个或更多个
系统处理器自动或半自动地确定成像探针的可允许运动范围的界限。图像数据可以实时地被生成。例如,可以指示一个或更多个系统处理器来在图像数据中识别解剖结构(例如前列腺、外括约肌、精阜、膀胱颈等)并在一些情况下识别处理探针和/或成像探针,并作为响应确定可允许运动范围的界限。可选地或附加地,响应于来自在成像探针和/或处理探针机器人臂上的一个或更多个定位和/或力传感器的成像探针的定位和/或力反馈数据,可以用一个或更多个系统处理器自动或半自动地确定成像探针的可允许运动范围的界限。例如,在成像探针和/或成像探针机器人臂上的一个或更多个力传感器可以提供组织压力数据,组织压力数据可以指示探针推进比较受抵抗的区域,并且可以呈现组织损伤的风险。
126.在步骤720,机器人臂在计算机控制下被自动操纵以扫描组织。例如,在处理过程的计划期间,机器人臂可以被预先编程为自动扫描目标部位以渲染目标部位的三维图像。当在主动模式中时,机器人臂可以被配置为仅在如在步骤715中设置的可允许运动范围的界限内移动。机器人臂当在主动模式中时可以被配置为从患者体内缩回处理探针,但是不将处理探针推进到患者体内,以确保患者的安全性;探针到患者体内的任何推进可以由用户手动地执行。在探针的缩回期间,机器人臂可以被编程为将探针维持在线性轨道上,使得探针的z轴定位维持基本上恒定。
127.在步骤725,机器人臂通过用户输入在计算机控制下被操纵。用户可以经由被提供到图像引导的处理系统的图形用户界面的输入(例如,通过如本文所述的处理或成像控制台提供的用户界面软件)来操纵机器人臂运动。例如,用户可以实现成像探针的旋转、平移和/或俯仰角的调整。当在主动模式中时,机器人臂可以被配置为仅在如在步骤715中设置的可允许运动范围的界限内移动。机器人臂当在主动模式中时可以被配置为从患者缩回处理探针,但是不将处理探针推进到患者体内,以确保患者的安全性;探针到患者体内的任何推进可以由用户手动地执行。
128.在步骤730,机器人臂在计算机控制下被自动操纵以调整成像探针的定位。可以根据预先编程的参数、用户指令、实时反馈(例如来自成像、定位和/或力反馈数据)或它们的组合来调整成像探针的定位。例如,成像系统可以被配置成例如基于用超声成像探针获得的目标部位的超声图像,使用智能图像识别,来在处理期间检测处理探针的位置。基于处理探针的检测到的位置,可以自动操纵机器人臂以调整成像探针的定位和/或定向,以便使成像探针与处理探针对准和/或以便补偿患者移动。
129.在步骤735,成像探针从机器人臂去耦。当处理过程完成时,用户可以使成像探针从机器人臂分离,手动地将机器人臂移动到一侧,且然后从患者移除成像探针。
130.可以用如本文所述的电路(例如本文所述的系统的处理器或逻辑电路中的一个或更多个)来执行方法700的一个或更多个步骤。电路可以被编程为提供方法700的一个或更多个步骤,并且程序可以包括存储在计算机可读存储器上的程序指令或例如具有可编程阵列逻辑或现场可编程门阵列的逻辑电路的所编程的步骤。
131.尽管上述步骤示出了根据一些实施例的操作耦合到成像探针的机器人臂的方法700,但是本领域中的普通技术人员将认识到基于本文描述的教导的许多变形。例如,可以按不同的顺序来完成步骤。可以添加或省略一个或更多个步骤。一些步骤可以包括子步骤。许多步骤可以每当必要时或期望时被重复。
132.图8a示出了在用如本文所述的处理系统处理患者期间的处理探针450和成像探针
460的配置。在一些实施例中,期望的是确保在系统的使用期间在患者身体外部的处理探针和成像探针不彼此碰撞或以其他方式彼此干扰,从而维持探针的移动的精度和系统的无菌性。耦合到处理探针和成像探针并被配置成控制它们的移动的如本文所述的机器人臂可以被配置成维持界限以防止在两个探针之间的碰撞或干扰。例如,耦合到处理探针的第一机器人臂和耦合到成像探针的第二机器人臂444中的一个或两个可以被配置成感测在两个探针之间的距离520,并且维持该距离基本上恒定或大于最小阈值以防止碰撞。可选地或附加地,如参考图6和图7所示的方法所述,用户可以对处理探针和成像探针中的一个或两个的可允许运动范围编程,以便设置防止在探针之间的碰撞或干扰的运动范围的界限。
133.例如,在机器人臂切换到主动模式之前,用户可以在探针的可允许俯仰角525的范围内旋转探针中的一个或两个以对探针的可允许运动范围编程,在该可允许运动范围内两个探针不接触彼此。
134.另外参考图8b,如本文所述,机器人臂442耦合到电机组802。电机组802可以耦合到探针450的手持件(hand piece)804。在一些实施例中,耦合到处理探针和成像探针的机器人臂中的一个或两个可以包括一个或更多个反馈感测机构。例如,第一机器人臂442和/或第二机器人臂444可以与被配置为检测在处理探针和/或成像探针之前的组织的压迫的力传感器可操作地耦合。在一些实施例中,由成像探针施加的力在向上施加压迫组织从0到4kg的范围内,以实现处理探针和目标组织区域的可视化。在一些实施例中,由处理探针施加的力与探针在腔(例如尿道)内的定位有关。在一些实施例中,该力与在尿道凹口处的支点和提升目标解剖结构的枢轴有关。这些力可以分别是对抗骨结构在从0到10kg力的范围内和在目标解剖结构(例如前列腺)上在从0到2kg力的范围内。
135.根据一些实施例,一个或更多个x方向力传感器810、一个或更多个y方向力传感器812和/或一个或更多个z方向力传感器814可以被设置在机器人臂442、手持件804和/或探针450上。例如,一个或更多个力传感器可以包括应变计、压力传感器或压电换能器。在一些实施例中,应变计包括惠斯通电桥(wheatstone bridge)的多种配置中的任一个。惠斯通电桥电路将电阻的小变化转换成可测量的电压差,该可测量的电压差可以等同于所施加的力。力传感器可以耦合到手持件,例如本文描述的任何手持件实施例。在一些情况下,一个或更多个力传感器操作地耦合到成像探针、处理探针或两者。
136.在一些实施例中,用于操作力传感器的电路与成像探针和处理探针绝缘和隔离。这允许探针满足任何患者漏电流要求,并降低被探针拾取的任何噪声,因而增强力传感器的信噪比(s/n)。在一些实施例中,来自力传感器的信号线可以扭绞在一起,并且可选地可以被屏蔽以维持信号完整性,提高抗扰性,并且维持足够的s/n比。力传感器可以由任何合适的材料形成,并且在一些情况下,对于在处理之前、期间或之后可能与患者接触的传感器的部分,其由生物相容性材料形成。
137.在一些实施例中,一个或更多个力传感器的尺寸被制造成安装在探针轴杆(例如成像探针或处理探针轴杆)上或内。力传感器可以被配置有任何合适的应变灵敏度“k”,其是在电阻的相对变化之间的比例因子。应变灵敏度是无量纲的数字,且被称为应变系数(“gf”)。线性模式应变计可用于测量在手持件上的在单一方向上的应变。传导信号线可以结合(bonded)到传感器的焊盘,其将信号传送到输入放大器。一个或更多个传感器可以结合到载体基板上的一个或更多个探针,载体基板可以使传感器与探针的任何金属(例如金
属探针轴杆)绝缘。
138.手持件在z方向上的位移可以由弹簧和传感器814检测。利用这个配置,整个探针组件可以能够滑动合适的距离以提供保护,防止探针被驱动到组织壁中。探针组件可以被布置在滑动推车820上,滑动推车820可以压靠简单的弹簧被反弹以提供恒定和已知的力“k”弹簧常数。以合适布置在短距离(例如小于2英寸)内进行手持件的准确距离测量(例如推车的我的位移)是可能的。其他位置编码器线性传感器可以组合地或者可选地被使用。例如,线性可变差动变压器(lvdt)是用于将机械运动转换为可变电流的机电传感器,并可用于测量对抗探针的插入力的阻力。光学编码器或许多合适的电感式线性编码器中的任一个。传感器可以基于电感式线性编码器824来测量力,并且可以被布置成非接触的以确保高可靠性。为了在针对数字编码器的大约15微米到例如针对模拟编码器的大约54微米之间的线性分辨率,可以提供高分辨率编码器824。
139.一个或更多个传感器可以被设置在一个或更多个机器人臂上以测量定位、定向、力或一些其他参数。在一些情况下,两个传感器可以是机器人臂组件的一部分,并且可以用于确定非预期的移动。这些传感器可以是位于机器人臂的一个或更多个接头处的内部编码器,并且可以是惯性测量单元(imu)822。imu是测量并报告一个或更多个参数(例如力、角速率和/或传感器的定向)的电子传感器设备,并且可以使用加速度计、陀螺仪和/或磁力计的组合。适合于合并到一个或更多个机器人臂内的一些imu可以具有
±
2/
±
4/
±
8/
±
16g的全标度加速度范围(“g”值与由于重力而引起的加速度有关)和每秒
±
125/
±
250/
±
500/
±
1000/
±
2000/
±
4000度的宽角速度范围(“dps”)。imu可以检测在机器人臂上的力,并将外力的大小和/或方向传递到计算设备,例如机器人控制系统。一个或更多个imu 822可以提供可以用于控制一个或更多个机器人臂的反馈以补偿振动、位置意识(positional awareness)和稳定补偿。
140.如在本文所述,机器人臂442可以通过使用传感器与探针450对接,以在粗略位置对准、中间位置对准和精细位置对准中的一个或更多个方面给予帮助。例如,探针可以与信标830(例如ir信标)相关联,并且机器人臂442可以支承ir接收器832,ir接收器832能够检测用于粗略对准的来自ir信标830的发射。一个或更多个对准基准点834可以与探针450相关联,以及一个或更多个对准传感器836可以与机器人臂442相关联。如本文所述,对准传感器836能够检测对准基准点的定位,并因而确定机器人臂442相对于探针450的定位。在一些实施例中,接近度传感器(例如霍尔效应传感器)或接近度开关用于检测在探针和臂之间的对准,以便使探针与臂接合,例如当臂被适当地操纵就位时将探针锁定到臂上。
141.在一些实施例中,当处理已经完成时,当用户保持探针时,臂可以从探针去耦,并且臂被拉(drawn)离探针,例如被自动拉离探针。
142.与机器人臂可操作地耦合的一个或更多个计算设备(例如如本文所述的控制台420或控制台490的处理器)可以包括用于执行以下操作的指令:响应于由传感器检测到的力而控制机器人臂的移动,例如防止前部组织的过度压迫以及对组织和/或探针的因而产生的损伤。在用于前列腺组织切除的处理系统的示例性使用情况下,处理探针理想地被定位于患者的前列腺腔的前部中心处,但是不过度压迫前部前列腺以防止对尿道/前列腺的无意伤害(例如,组织的过度出血、坏死、穿孔)和/或对成像探针和处理探针中的一个或两个的损伤。类似地,可以是trus探针的成像探针在有足够的前部压迫的情况下理想地被定
位在患者的直肠内以观察前列腺和处理探针,但是不过度压迫组织,以便避免对直肠的无意伤害(例如,组织的出血或穿孔)和/或对成像探针和处理探针中的一个或两个的损伤。处理探针、耦合到其的第一机器人臂、成像探针和/或耦合到其的第二机器人臂444可以被设置有被配置为检测探针对组织的前部压迫的力传感器。检测到的力水平可以被传递到与机器人臂可操作地耦合的处理器,并与预先编程的或存储在计算系统的存储器中的力的阈值进行比较。如果检测到的力超过阈值,则机器人臂的移动可以被调整以远离前部组织移动探针,从而至少部分地减轻对前部组织的压迫。
143.另一示例性反馈感测机构可以包括与第一机器人臂和/或第二机器人臂444可操作地耦合的定位和/或运动传感器。与机器人臂可操作地耦合的一个或更多个计算设备可以包括用于执行以下操作的指令:响应于由传感器检测到的定位和/或运动而控制机器人臂的移动,例如响应于在处理和/或扫描过程期间的患者移动而调整处理探针和/或成像探针的定位。当刚性元件(例如处理探针或成像探针)被定位于患者的身体内部时,患者移动可能潜在地引起对患者的伤害,并且在探针的移动和随后的重新定位期间可能需要移除探针。响应于患者的感测到的移动而自动调整探针的定位的机器人臂可以提高手术过程的安全性以及效率。一个或更多个定位或运动传感器(例如线圈和/或加速度计)可以附接到患者,并且传感器可以与控制机器人臂的计算设备可操作地耦合。例如,传感器可以被配置成生成小的局部电磁场或其他信号以帮助确定患者的位置和/或移动。处理器可以接收检测到的患者移动数据,并且相应地调整机器人臂的移动以基本上匹配患者移动,使得耦合到机器人臂的探针可以相对于组织或患者器官维持在可接受的定位范围内。在一些实施例中,处理器被配置为如果到传感器的力超过阈值量则中断处理。
144.可选地,在一些实施例中,机器人臂可以被配置成以联动方式自动移动。例如,如果系统的用户移动第一机器人臂,则第二机器人臂444可以被配置成相应地自动调整它的定位。在用于前列腺组织切除的处理系统的示例性使用情况下,患者的前列腺可能不是在解剖结构上对称的,并且用户可能需要相应地调整处理探针的定位或定向(例如,将探针往一侧推,调整探针的俯仰角等)。耦合到成像探针的机器人臂可以被配置成自动检测对耦合到处理探针的机器人臂进行的调整,并对成像探针的定位和/或定向进行相对应的调整。两个机器人臂的这样的联动移动可能对将处理探针和成像探针相对于彼此维持期望的位置关系可能是有用的,例如处理探针的细长轴基本上与成像探针的细长轴对准。
145.图9a
‑
9c示意性地示出了处理探针轴451与成像探针460的矢状平面950的对准。图9a是相对于成像探针460倾斜的处理探针450的侧视图。处理探针450包括细长轴451,以及成像探针460包括为由成像探针生成的图像提供参考的细长轴461。细长轴461可以至少部分地限定矢状图像平面950。图9b是基本上与矢状图像平面950对准的处理探针450的俯视图。当处理探针轴451基本上与矢状图像平面950对准时,处理探针的相当大的部分在超声探针的视野内,并且在矢状图像中是可见的。在一些实施例中,当细长轴相对于垂直于矢状图像平面的平面被对准成在相对于彼此的大约5度内时,这两个探针基本上被对准。对于在探针之间有较大倾斜角的情况,处理探针将横向于超声探针的视野延伸,并且只有在超声探针的视野内的探针的部分在超声图像中是可见的。
146.当探针在矢状图像平面内基本上被对准但以如图9a所示的角度倾斜时,处理探针和组织可能看起来在矢状图像中被旋转,并且可接受的旋转量可以大于例如5度。图9c是横
穿矢状图像平面950的处理探针450的俯视图。当成像探针没有与处理探针充分对准时,处理探针可能看起来在矢状平面图像中被扭曲,仅穿过矢状场延伸的处理探针的一部分出现在图像中。在一些实施例中,处理探针和成像探针可以包括一个或更多个传感器以确认探针彼此间的期望对准(平行的和/或共面的)。例如,该系统可以包括分别在处理探针450和成像探针460上的第一定向传感器473和第二定向传感器476。在一些实施例中,第一定向传感器和第二定向传感器476包括可以指示探针彼此间的相对定位和定向的磁性元件、霍尔效应传感器、标度盘、可变电阻器、电位计、加速度计或它们的任何组合。在一些实施例中,可以通过围绕超声成像探针的细长轴旋转超声成像探针来旋转超声成像探针的矢状平面的角度。例如,在一些患者体内,前列腺不是对称的,或者尿道凹口变形,并且成像探针和处理探针可以位于患者身体的相对侧上或者至少相对于彼此关于患者的中线偏移,以及成像探针围绕它的细长轴的旋转可以旋转超声探针的矢状平面并且将处理探针和组织处理区域带入超声成像探针的视野内。处理探针和成像探针的对准、定向和相对定位可以继续在处理过程期间被监测。
147.当处理探针和成像探针未充分对准时,用户可以使用用成像探针获得的处理探针的图像来例如通过将用户输入提供到gui内以用于控制耦合到处理探针或成像探针的机器人臂来使处理探针和成像探针对准。可选地或附加地,如本文所述,机器人臂可以被编程为自动调整移动以维持探针充分对准。例如,当用户通过控制耦合到处理探针的第一机器人臂来调整处理探针的定位或定向时,耦合到成像探针的第二机器人臂444可以自动检测对第一机器人臂进行的调整,并进行相对应的调整以基本上匹配处理探针沿着处理探针轴的俯仰、滚转、偏航和/或线性定位。
148.为了提供两个机器人臂的自动联动移动,校准步骤可以被添加到处理过程,其中每个臂识别它相对于另一个臂的定位。例如,每个机器人臂可以包括在已知位置的臂上的“目标”;在校准过程期间,用户可以用第一臂耦合结构操纵第一臂以触摸位于第二臂上的目标,并且用第二臂耦合结构操纵第二臂以触摸位于第一臂上的目标。因此,两个机器人臂的自动联动移动可以通过消除用户在移动第一臂之后单独地调整第二臂的移动的需要来便于处理过程。此外,如本文所述,在当探针被插入患者的身体内时患者移动的情况下,两个臂的联动移动可以在提高处理过程的安全性和效率方面给予帮助。
149.可选地,在一些实施例中,与处理探针耦合的机器人臂可以被配置为沿着预先编程的处理轮廓移动处理探针,以用于执行对目标部位的处理。例如,处理轮廓可以包括目标部位的组织切除轮廓,其可以由处理系统的用户编程并被存储在与机器人臂可操作地耦合的一个或更多个计算设备的存储器中。关于使用被编程的处理轮廓的自动化处理的另外的细节可以在以前通过引用被并入本文的pct公布号wo2013/130895中找到。
150.可选地,在一些实施例中,与成像探针耦合的机器人臂可以被配置为在用处理探针处理之前和/或期间沿着预先编程的成像轮廓移动成像探针,以生成目标部位的三维渲染。目标部位的三维图像可以通过下面的操作从双平面成像探针得到:1)在成像探针捕获目标部位的矢状视图图像的情况下原地旋转成像探针,然后内插矢状视图图像,或者2)在成像探针捕获目标部位的横向视图图像的情况下(沿着探针的z轴)平移成像探针跨越目标部位,然后内插横向视图图像。为了提高3d图像渲染的效率和因而产生的3d图像的分辨率,机器人臂可以被配置成沿着预先编程的成像轮廓快速扫描目标部位,并且3d图像可以使用
软件来生成以基本上实时地渲染处理部位的3d图像。预先编程的成像轮廓可以存储在一个或更多个计算设备的存储器上,并且可以包括在成像探针原地旋转时以预定时间间隔进行的多个矢状视图扫描和/或在成像探针(沿着成像探针的z轴或细长轴)平移跨越目标部位时以预定时间间隔进行的多个横向视图扫描。
151.使用机器人臂用成像探针对目标部位进行的自动的计算机控制的扫描也可用于为了额外的处理而生成关于目标部位的有用信息。例如,成像探针可以被配置为在切除过程之后执行对目标部位的彩色/多普勒扫描,以便找出在目标部位内的需要止血的出血部位。
152.在一些实施例中,多普勒超声图像将远离超声探针移动的血液显示为蓝色并将朝着超声探针移动的血液显示为红色。在一些实施例中,可以在组织切除之前调整组织切除轮廓,以便减少并且在一些情况下避开对在多普勒超声图像中存在的血管的切除。例如,超声图像可以包括3d超声图像和3d切除轮廓,3d切除轮廓被调整以减少或避开血管。
153.图10示出了从患者的组织805的超声图像800识别高血液灌注部位810。如在本文所述,当成像探针在多普勒成像模式中操作时,耦合到成像探针的机器人臂可以自动移动以从成像探针获得扫描。可以基于对更靠近或更远离成像探针的成像平面流动的血液的检测从因而产生的多普勒扫描图像识别高血液灌注部位810。在一些情况下,高血液灌注部位810包括出血部位,并且基于多普勒信息,用户可以有效地找出出血并例如通过使用局部烧灼或止血剂(例如凝胶和基质(matrices))来处理出血,从而减少出血、烧灼时间和热或对组织的其他影响。在一些情况下,高血液灌注部位810也可能包括异常或甚至癌性组织生长。这些区域可以被标记或识别用于随后的处理。例如,可以在异常组织周围切除正常组织以留下异常组织的岛,异常组织的岛然后例如以局部药物输送进行处理。
154.使用成像探针对目标部位进行的三维扫描也可以用于识别在目标部位处的组织异常,例如肿瘤。例如,可以基于在被成像组织的高回声和低回声区域之间的差异,从用成像探针进行的对目标部位的自动扫描获得的目标部位的图像识别肿瘤。目标部位的机器人扫描可以提高图像分析的速度,并因此提高对组织异常的准确检测。此外,成像探针可以在自动扫描期间在多普勒成像模式中操作以识别较高血流的区域,较高血流的区域可对应于潜在癌的位置。可以在识别出的组织区域处执行活组织检查以提高对癌的检测。
155.图11a、图11b和图11c示出了包括处理操作台的处理系统1100的示例性实施例。系统1100可以包括系统400的一个或更多个部件,并且可以包括在探针底座上的耦合结构,并且可以枢转以在一个或更多个探针插入患者体内之后将臂耦合到成像探针460和处理探针450中的一个或更多个。图11a是处理系统1100的侧视图,图11b是处理系统1100的前视图,以及图11c是示出患者p的定位的处理系统的透视图。图11a
‑
11c还示出了包括x轴、y轴和z轴的三维坐标系图例,其中x轴、y轴和z轴中的每一个垂直于彼此,x轴和z轴是正交的水平轴,以及y轴是竖直轴,以有助于察看系统1100和对其进行描述。处理系统1100可以包括处理探针450、成像探针460、平台1113以及探针安装和调整组件1120。探针安装和调整组件1120可以包括探针底座1104、枢轴1105、竖直转动架1106、用于沿着第一z平移方向1133(即,沿着z轴或平行于其的轴)平移竖直转动架1106的第一水平滑块1107、沿着z方向定向的一对第一水平臂1108、沿着y方向(即,沿着y轴或平行于其的轴)定向的一对竖直臂1111、用于该一对竖直臂1111的一对第一锁定机构1110、用于沿着第二z平移方向1131(即,沿着z
轴或平行于其的轴)平移该一对竖直臂1111的一对第二水平滑块1112、具有耦合到其的该一对第二水平滑块1112的患者支撑件(例如平台1113)、沿着x方向定向的一对第二水平臂1114(每个第二水平臂1114耦合到相应的第一水平臂1108)、用于该一对第一水平臂1108的一对第二锁定机构1115、用于竖直转动架1106的水平调整器1116、用于竖直转动架1106的第三锁定机构1117以及用于在第一x平移方向1136上(即,沿着x轴或平行于其的轴)平移第一水平滑块1107的第三水平滑块1118。这些臂、滑块和锁定机构可以是下列情况中的一个或更多个:机械地或手动地被致动或相对于彼此被重新定位。如在本文所述,处理探针450和成像探针460可以被对准为下列情形中的一个或更多个:彼此平行或共面。处理探针450、成像探针460、各种臂、各种滑块或各种机构中的一个或更多个可以用一个或更多个保护性帷帘覆盖,以便于为系统1100的各种部件执行下列操作中的一个或更多个:提供无菌操作环境或将随后的清理减到最少。
156.处理探针450和成像探针460可以基本上竖直地被对准并且僵硬地(例如刚性地)并且可调整地连接到一个或更多个探针耦合底座1104,其中探针耦合底座1104可以围绕由枢轴1105限定的轴在第一旋转方向1135上(即,围绕x轴或平行于其的轴)相对于竖直转动架1106例如在yz平面(或平行于其的平面)中旋转,如图11a
‑
11c所示。在一些实施例中,可以通过调整处理探针450相对于探针底座1104的定位以及通过调整成像探针460相对于探针底座1104的定位来设置处理探针450的细长轴451相对于成像探针460的细长轴461的定位。在一些实施例中,处理探针450和成像探针460每个由紧固件可拆卸地安装到探针耦合底座1104,该紧固件包括螺钉、螺母、垫圈、螺栓、销、枢轴、铰链、轴承、夹具、带子、指形螺钉、插销、夹头、燕尾榫、通道、弹簧、磁体、螺纹、键(key)、槽、齿轮(gear)、滑轮(pulley)、齿条(rack)、小齿轮(pinion)或它们的任意组合。在一些实施例中,处理探针450可拆卸地安装到第一探针耦合底座1104,以及成像探针460可拆卸地安装到第二探针耦合底座1104。在一些实施例中,探针耦合底座1104包括电连接器以将电力和/或数据传输到处理探针450和/或成像探针460或从处理探针450和/或成像探针460传输到计算机或处理器。在一些实施例中,探针耦合底座1104包括软管连接器以将液体和/或气体传输到处理探针450。在一些实施例中,紧固件、电连接器和软管连接器包括单个部件。在一些实施例中,紧固件和电连接器包括多个部件。在一些实施例中,处理探针450相对于探针耦合底座1104的定位和成像探针460相对于探针耦合底座1104的定位手动地或通过驱动致动器或两者来调整。在一些实施例中,处理探针450相对于探针底座1104的定位和成像探针460相对于探针底座1104的定位由指形螺钉、枢轴、铰链、销、槽、轴承、滑轮、齿条、小齿轮、线性致动器、电机、螺线管或它们的任意组合来调整。
157.在一些实施例中,探针耦合底座1104还包括允许用户手动地操纵它的定位的手动致动特征。在一些实施例中,手动致动特征包括手柄(handle)、旋钮(knob)、柄(hilt)、杆(bar)、把手(grip)或它们的任意组合。
158.在一些实施例中,探针耦合底座1104可以围绕第一旋转方向1135旋转至少约315度、至少约300度、至少约280度、至少约260度、至少约240度、至少约220度、至少约200度、至少约180度、至少约160度、至少约140度、至少约120度、至少约100度或至少约80度。
159.在一些实施例中,探针耦合底座1104还包括线缆引导管、线缆释放构件、滑环或它们的任意组合以约束和保护从处理探针450或成像探针460引出的任何线缆。
160.在一些实施例中,基本上竖直的转动架1106另外在第一y平移方向1132上(即,沿着y轴或平行于其的轴)延伸和缩回以设置探针底座1104相对于第一水平滑块1107的高度。转动架可以包括允许延伸和缩回的延伸部接头,例如伸缩式滑动管或螺纹组件及它们的组合。在一些实施例中,竖直转动架1106的定位是手动地调整的或通过驱动致动器或两者来调整的。探针底座1104相对于竖直转动架1106的旋转可以是机器人控制的或手动地设置的。在一些实施例中,竖直转动架1106围绕它的竖直对称轴在第二旋转方向1134上(即,围绕y轴或平行于其的轴)的旋转可以通过第三锁定机构1117设置和锁定。在一些实施例中,该一对第一水平滑块1107能够朝着或远离患者p平移处理探针450和成像探针460。在一些实施例中,第一水平滑块1107包括手动致动器、驱动致动器或两者。在一些实施例中,朝着或远离患者的竖直转动架1106的定位通过水平滑块1107改变。水平调整器1116可以在横向于患者支撑件的x方向上平移机器人臂。水平调整器1116可以通过手动致动器、驱动致动器或两者来操作。
161.在一些实施例中,第三水平滑块1118允许第一水平滑块1107以及因而处理探针450和成像探针460在水平方向上(即,沿着x轴)朝着患者的左侧或右侧平移,其中一个或更多个第三锁定机构1117可以接合(engage)和脱离(disengage)竖直转动架1106沿着第三水平滑块1118水平地平移的能力。在一些实施例中,第三水平滑块1118的每一端附接到第二水平臂1114,其中每个第二水平臂1114可以垂直地附接到第一水平臂1108,并且其中每个第一水平臂1108可以垂直地附接到竖直臂1111。在一些实施例中,每个竖直臂1111附接到在平台1113上的第二水平滑块1112,其中第二水平滑块1112能够在水平方向上(即,沿着z轴)朝着或远离患者平移一个或更多个竖直臂1111,其中一个或更多个第一锁定机构1110设置一个或更多个竖直臂1111相对于平台1113的定位。
162.在一些实施例中,处理系统1100的部件的一个或更多个示例性实施例由金属、塑料、织物、布、泡沫、木材、碳纤维、玻璃纤维、玻璃或它们的组合组成。
163.在一些实施例中,竖直转动架1106、第一水平滑块1107、第二水平滑块1112和第三水平滑块1118包括致动器、轴承、轴、蜗杆传动、齿条、小齿轮、齿轮、皮带、链条、滑轮、滑块、套圈、轴杆或它们的任意组合。在一些实施例中,竖直转动架1106、第一水平滑块1107、第二水平滑块1112和第三水平滑块1118中的至少一个还包括编码器,其中编码器测量平移或旋转位移。
164.在一些实施例中,第一锁定机构1110、第二锁定机构1115和第三锁定机构1117包括凸轮、螺钉、手柄、旋钮、轴杆、夹具或它们的任意组合。
165.在一些实施例中,滑块、转动架和竖直延伸部接头各自包括耦合到处理器的致动器以控制耦合结构的定位和角度。在一些实施例中,在水平臂1108和第二水平臂1114之间的耦合器包括动力接头。在一些情况下,动力接头在处理器的机器人控制下,并且可以被致动,以便将硬件移开以在从患者支撑件挪开(extraction)患者方面给予帮助。
166.在一些实施例中,该系统包括耦合到处理器的联接装置,且该联接装置包括以下中的一个或更多个:滑块、转动架和竖直延伸部接头。这些一个或更多个部件中的每一个可以包括耦合到处理器的致动器以响应于来自处理器的控制信号而控制在臂上的耦合结构的定位和角度。
167.例如,臂可以包括多个臂和滑块。
168.在一些实施例中,处理系统1100的部件的一个或更多个示例性实施例可以是可拆卸的、便携式的或两者。在一些实施例中,处理系统1100还包括线缆管理构件、轮子、踏凳、电源、安装构件或它们的任意组合。
169.一个或更多个成像传感器1145可以被设置在处理系统1100各处的一个或更多个位置上,并且可以被设置在第一水平臂和/或第二水平臂上。一个或更多个成像传感器可用于获取在成像探针460或处理探针450或两者上的基准标志的图像,以在机器人臂与探针的对准和/或对接方面给予帮助,或者用于检测探针的定位、定向或对准。用户界面1140可以设置在机器人臂、探针或两者上以指示机器人臂与探针的对接状态。在一些情况下,用户界面是一个或更多个视觉指示器,例如led指示器。一个或更多个视觉指示器可以传达机器人臂或探针的附加操作或状态信息。
170.图12示出了包括处理平台的处理系统1200的示例性实施例。系统1200可以包括如本文所述的系统400或系统1100的一个或更多个部件。图12是处理系统1200的透视图。处理系统1200可以包括处理推车1210。推车1210可以包括壳体1213、公共机器人臂1214(其可以完成下列操作中的一个或更多个:相对于壳体1213旋转或平移)、流体容器吊架1215、用于例如盐水的流体容器1216、推柄1217、一个或更多个轮子1218、支撑件1219、一个或更多个显示屏1220、处理探针机器人臂442(其可以完成下列操作中的一个或更多个:相对于公共机器人臂1214旋转或平移)、耦合到处理探针机器人臂442的处理探针450、成像探针机器人臂444(其可以完成下列操作中的一个或更多个:相对于公共机器人臂1214旋转或平移)以及耦合到成像探针臂444的成像探针460。
171.在一些实施例中,处理探针机器人臂442和成像探针机器人臂444与公共机器人臂1214协作来将处理探针450和成像探针460分别定位成彼此对准(即,平行和/或共面对准)。在一些实施例中,壳体1213包含电源、压力源、通信构件、电力线缆、药物或它们的任意组合。在一些实施例中,公共机器人臂1214可以相对于壳体1213关于一个或更多个自由度枢转或平移。在一个示例中,公共机器人臂1214可以围绕垂直于地板的竖直轴枢转大约220度的角度。在一些实施例中,公共机器人臂1214能够延伸和收缩。在一些实施例中,推车1210是可运输的,其中推车1210可以包括推柄1217和一个或更多个轮子1218以及支撑件1219以在患者处理期间维持推车1210的稳定性。在一些实施例中,推车1210还包括流体容器吊架1215,其能够支撑存储一定量的供处理探针450使用的流体或盐水的盐水或流体容器1216,处理探针450可以为了组织切除而提供加压流体射流。在一些实施例中,推车1210还包括能够向执业医生或患者显示来自成像探针1202或其他源的信息的一个或更多个屏幕1220。在一些实施例中,处理系统1200还包括用于存储移除的组织和消耗的盐水流体的容器。
172.图13示出了探针安装和调整组件1600的示例性实施例。探针安装和调整组件1600由多个夹具1302附接到患者支撑件。根据一些实施例,患者支撑件是床、操作台或平台,并且夹具例如通过机械地夹到患者支撑件的轨道(rails)上来附接到患者支撑件。探针安装和调整组件1600可以包括用于附接到患者支撑件的2个、3个、4个、6个或更多个夹具1302。在一些实施例中,安装组件1600在基本上“防碰撞”配置中支撑其上安装有第一探针460的第一机器人臂442和其上安装有第二探针450的第二机器人臂444,使得医疗专业人员撞到安装组件1600、第一机器人臂442、第一探针460、第二机器人臂444或第二探针450中的一个或更多个内导致被插入患者体内的探针的在临床上可接受的量的移动,例如不大于大约
5mm的移动。
173.在一些实施例中,
174.虽然安装组件1600可以以多种方式被配置,但是在一些实施例中安装组件被配置成响应于对细长支撑件1310(例如横梁1310)的150kg负荷而将细长支撑件1310相对于第一轨道和第二轨道的移动限制到不大于5mm。如在本文所使用的,术语“细长支撑件”和“横梁”可互换地被使用。在一些实施例中,响应于对细长支撑件1310的100kg负荷,该移动不大于3mm。在一些实施例中,细长支撑件1310、第一夹具1302、第一臂442、第二夹具1304和第二臂444可以被配置成响应于对细长支撑件1310的150kg负荷而将细长支撑件1310的移动限制到不大于5mm,并且响应于对细长支撑件1310的100kg负荷,该移动可以不大于3mm。在一些实施例中,待插入患者体内的探针包括在从大约20cm到大约60cm的范围内的距离,并且安装组件1600被配置成响应于对细长支撑件1310的负荷而将探针的远侧端移动不大于6mm。
175.探针安装和调整组件1600可以是由可折叠的通用手术操作台安装系统和安装到通用底座上的一对可锁定定位臂组成的模块化系统。通用底座是调整起来容易和直观的,并适应大多数常用的手术操作台,包括不同尺寸的安装轨道、不同的操作台宽度以及带有可拆卸和折叠腿支撑件的操作台。它提供使安装臂1312、1314能够针对重量、刚度、流畅运动和运动范围被优化的刚性平台以提供卓越的手术计划能力。
176.两个机械臂442、444允许在所限定的手术计划场内的平稳的流畅运动。它们提供患者解剖结构的触觉反馈以将损伤的风险降至最低,同时有助于探针对准以使手术计划过程简单化。当被锁定时,机械臂442、444提供将成像探针和处理探针都保持在操作者想要它们被定位于的位置的刚性接口。在手术过程建立和收尾(takedown)期间,探针安装和调整组件1600可以被分成可以由一个人展开并安装在控制台中/上以用于存放的紧凑的、容易可管理的部件。
177.根据一些实施例,探针安装和调整组件1600包括两个类似的、例如基本上相同的轨道夹具(rail clamps)1302、1304和横梁1310。轨道夹具1302、1304可以被调整和设置成适合所有常用的操作台轨道尺寸,并且用杠杆1406的简单推动来安装/移除。杠杆1406是轨道夹具的主要接触点,并且允许它们用一只手在单个运动中被安装。横梁1310对接到轨道夹具1302、1304的两个插座1316中以完成操作台安装系统,并平直地折叠用于存放。它通过挤压两个控制触发器来展开,在每只手中一个控制触发器。控制触发器解锁转角枢轴,转角枢轴实现折叠以用于存放以及实现精细宽度调整以用于安装到患者支撑件。控制触发器还解锁将横梁1310固定到轨道夹具的机构。根据一些实施例,在横梁1310上的机构在被推入就位时自动接合,并且自我锁定以最小化不正确组装的可能性。横梁1310还可以具有宽度调整机构,以用于针对不同的手术操作台宽度进行粗略调整。部件可以在对称形式中被定位以创建相对于or操作台的等腰梯形几何结构。在一些实施例中,轨道夹具1302、1304可以被放置在不同的z定位上,患者可以被放置在不同的x定位上,并且在操作台上以z’角度倾斜,产生多个非对称。包括轨道夹具1302、1304、轨道夹具插座1316以及可锁定的横梁安装臂1312、1314和横梁1310(具有围绕y轴旋转的臂)的安装组件1600的设计提供对臂结构的调整,允许对适应以下所有变量的成像探针460和处理探针450的精确定位:设备设置、患者解剖结构和患者定位。
178.根据一些实施例,机械臂442、444包括两个类似的臂(例如,基本上相同的臂)和横
向调整机构。每个臂可以包括由臂节段联接在一起的三个旋转/可锁定接头、在底部上牢固地安装到横梁1310的接口、以及在顶部处的控制手柄1318和步进器底座1320。接头可以被配置为围绕x轴旋转。控制手柄1318是用于操纵的主要接触点,并且实现每个探针450、460的单手定位和调整。步进器底座1320提供用于安装步进器的帷帘安全接口(drape
‑
safe interface),步进器用于对成像探针460和处理探针450的精细控制。每个机械臂442、444可以用手术帷帘披盖以最小化污染并简化在手术过程之后的清洁。控制手柄1318可以具有两级致动机构,第一级用于一起解锁所有接头并保持它们解锁,以及第二级用于当处于期望定位上时重新锁定系统。这可以减小在操作期间为了改善的触觉感觉和更精确的控制而紧紧抓住来保持每个臂的需要。在一些实施例中,控制手柄1318包括用于操纵机器人臂的手柄,并且按钮或开关接合或脱离在接头内的锁定机构以允许或禁止机器人臂的手动操纵。
179.夹具1302、1304由夹具耦合器1324连接到插座1316。夹具耦合器1324可以允许在夹具1302和插座1316之间的自由度,从而允许夹具1302的定向或定位的调整以便于夹到患者支撑件。插座1316连接到安装臂1312。在一些实施例中,插座1316限定凹槽,并且安装臂1312通过装配在凹槽内而与插座1316耦合,并且可以通过任何合适的机械相互作用(例如球形锁销、摩擦配合、紧定螺钉、指形螺钉、销槽、凸台和凹穴、销、干涉结构或某个其他合适的连接结构)来被固定。在一些实施例中,安装臂1312包括使锁定销枢转以允许在安装臂1312和插座1316之间的牢固连接的杠杆。在示例性使用中,根据一些实施例,安装臂1312可以被插入插座1316的凹槽中,并且当安装臂1312接合插座1316的内表面时,锁定销可以缩回。在完全插入时,可被偏置以远离安装臂1312延伸的锁定销或其他突出结构可从安装臂向外卡入在插座1316中形成的凹槽、腔、孔或凹穴(pocket)中,以将安装臂1312牢固地连接到插座1316。在安装臂1312上的杠杆可以耦合到突出结构,使得当杠杆被压下时,突出结构被撤回到安装臂1312中以便于安装臂1312从插座1316撤回。
180.安装臂1312例如通过横梁耦合器1326连接到横梁1310。横梁耦合器1326可以允许在安装臂1312和横梁1310之间的枢转移动。如所示,一对安装臂1312、1314可以在横梁1310的任一端处连接到横梁1310。该一对安装臂1312、1314可以围绕横梁耦合器1326旋转或枢转以改变在夹具1302、1304之间的距离。以这种方式,在夹具1302、1304之间的距离可以被调整以安装在各种不同尺寸的患者支撑件上。
181.横梁1310支承机械臂基座1328。机械臂基座1328可以可滑动地连接到横梁1310,横梁1310允许机械臂基座1328沿着x轴滑动并相对于患者水平地向左和向右移动。机械臂基座1328可以以任何合适的方式(例如通过螺钉、指形螺钉、凸轮、杠杆、锁、转锁)或用于将机械臂基座1328固定到横梁1310的任何合适的结构来被固定到横梁1310。
182.机械臂基座1328为一个、两个或更多个机械臂442、444提供附接点。如所示,在一些实施例中,两个机械臂连接到机械臂基座1328。可以通过任何类型的安全连接(例如螺钉、滑动锁、夹子或其他合适的连接器)来连接机械臂442、444。探针安装和调整组件1600的部件可以由任何合适的材料形成,并且在一些实施例中,一个或更多个部件由诸如以下项的金属形成:不锈钢、钛、钽、铂、钯或任何合适的合金。例如,探针安装和调整组件1600的部件可以可选地或此外由任何合适的聚合物(例如以下中的一个或更多个:聚氯乙烯(pvc)、聚丙烯(pp)、聚乙烯(pe)、聚苯乙烯(ps)以及尼龙、聚对苯二甲酸乙二醇酯(pet)、聚酰亚胺(pa)、聚碳酸酯(pc)、丙烯腈
‑
丁二烯(abs)、聚醚醚酮(peek)或聚氨酯(pu))形成。
183.在一些实施例中,夹具1302、夹具耦合器1324、插座1316、安装臂1312、横梁耦合器1326、横梁1310、机械臂基座1328或机械臂444包括致动器、轴承、轴杆、蜗杆传动、齿条、小齿轮、齿轮、皮带、链条、滑轮、滑块、套圈、轴或它们的任意组合。在一些实施例中,夹具1302、夹具耦合器1324、插座1316、安装臂1312、横梁耦合器1326、横梁1310、机械臂基座1328或机械臂444中的至少一个包括编码器,其中编码器测量平移或旋转位移或定位。
184.机械臂442、442可以设置有一个或更多个节段,其由在节段之间提供自由度的接头分开。例如,机械臂可以具有两个、三个、四个或更多个节段1330,每个节段通过允许在相邻节段1330之间的相对枢转或旋转移动的接头1332耦合到彼此。机械臂其本身可以通过允许机械臂围绕一个或更多个轴的旋转的接头耦合到机械臂基座1328。
185.机械臂442支承探针底座1334,探针450可以安装到探针底座1334。如所示,第一机械臂442支承成像探针460,以及第二机械臂444支承处理探针450。在一些实施例中,探针底座1334包括升降器1336,升降器1336被配置为在y方向上提升探针,例如处理探针450,使得处理探针450高于成像探针460。因此,在处理探针450和成像探针460彼此竖直地对准的情况下,升降器1336便于处理探针450避开与成像探针460接触,因为它们相对于彼此竖直地隔开。
186.处理探针450具有沿着处理探针450的轴杆的细长轴,以及类似地,成像探针460具有沿着成像探针460的轴杆的细长轴。在一些配置中,处理探针轴和成像探针轴在平面中被对准。也就是说,轴相对于彼此平行,因而使它们变成共面的。在一些实施例中,机械臂442、444和探针底座1334的配置可以将处理探针轴和成像探针轴彼此共面地定位在竖直平面中。换句话说,这两个轴可以竖直地被对准,一个探针直接在另一个探针上方。
187.根据一些实施例,探针在手术计划场内在x、y和z方向上可移动以及围绕这些轴中的任一个的可旋转运动。在一些情况下,成像探针460和处理探针450独立地可定位在yz平面中,并且在一些情况下存在沿着x轴的有限相对运动。根据一些实施例,成像探针460具有有限的平移运动范围,并且在一些情况下在x方向上距离中心定位大约
±
2英寸;在y方向上距离中心定位大约
‑
3英寸至+4英寸;在z方向上距离中心定位大约
‑
9英寸至+2英寸(以及在步进电机的精细控制的情况下在z方向上的额外的100mm)。成像探针460可以具有有限的旋转运动范围,并且在一些实施例中,可以围绕x轴旋转在0
°
和约45
°
之间的任何角度,围绕y轴旋转
±
15
°
,以及围绕z轴旋转
±
32
°
。
188.根据一些实施例,处理探针450可以具有有限的运动范围,其可以是沿着x轴距离中心大约
±
2英寸,距离患者支撑件的顶部大约3英寸到12英寸,在z方向上大约
‑
9英寸到2英寸(加上在步进电机控制下的额外的大约100mm)。在一些实施例中,处理探针450可以例如围绕x轴旋转大约
±
30
°
,围绕y轴旋转
±
15
°
,以及围绕z轴仅有非常小的调整。
189.机械臂还可以包括控制手柄1318。根据一些实施例,控制手柄1318耦合到一个或更多个机械臂,并允许操作者手动地定位机械臂442、444以及伴随地定位由机械臂支承的探针。控制手柄1318可以是提供手动地调整或移动机械臂的方式的任何合适的配置。在一些实施例中,控制手柄1318包括杠杆,该杠杆使在分离机械臂的节段的一个或更多个接头中的离合器脱离。在一些情况下,当被压下时,控制手柄1318的杠杆使一个、两个、三个或更多个接头脱离以允许接头枢转、旋转或允许操作者手动地定位机械臂的某个组合。控制手柄1318可以连接到探针滑块1340,或者可以与探针滑块1340一体地形成。探针滑块1340允
许成像探针460或处理探针450或两者基本上在z方向上平移进出患者身体。探针滑块1340可以手动地被操作、自动地被操作或两者的组合。
190.在使用中,夹具1302、1304耦合到患者支撑件。可以有耦合到患者支撑件的两个夹具、四个夹具、六个夹具或更多个夹具,患者支撑件在一些情况下是床。夹具可以包括允许在夹具内的夹爪间隔开的夹具调整器1342。在每个夹具上的手柄1408由操作者操纵,并且夹具的夹爪牢固地抓住患者支撑件。插座1316可以被操纵以将插座1316定位在被配置为与探针安装和调整组件1600的安装臂1312耦合的定向上。安装臂1312、1314然后耦合到插座1316,并以任何合适的方式固定到安装臂。
191.横梁1310可以连接到安装臂1312;然而,在一些实施例中,横梁1310和安装臂1312、1314从彼此不可移除,并且安装臂与插座1316的耦合将横梁1310放置在适当的位置上以用于对患者的处理。一旦横梁1310处于适当的位置上,机械臂442、444就可以固定到横梁1310的机械臂基座1328。成像探针460、处理探针450或两者然后耦合到探针支撑件1334。然后,操作者可以例如通过使用控制手柄1318来手动地操纵机械臂442、444,以定位成像探针460和处理探针450。
192.机械臂442、444则可以是机械控制的,或者可以在手术过程的部分或全部过程期间被手动地控制。在一些实施例中,机械臂442、444被置于起始定位上。探针安装和调整组件1600的模块化性质允许部件被分离、容易被管理和独立地被设置。所示的配置还通过使成像探针460和处理探针450在同一平面中自动对准来允许处理计划,并且实现探针的平稳的触觉定位和调整。此外,在一些实施例中,机械臂实现对探针的定位和压缩调整,而在接头中的步进电机允许探针的计算机控制的z方向定位和角度调整。虽然在一些实施例中该描述提到单个机械臂442、安装臂1312和附随硬件的部件,但是应当认识到,附加机械臂可以具有相同或相似的硬件。
193.图14a、图14b和图14c示出了可以与探针安装和调整组件1600一起使用的夹具1302的示例性实施例。夹具1302具有固定夹爪1402、可移动夹爪1404和改变在固定夹爪1402和可移动夹爪1404之间的距离的杠杆1406。杠杆1406包括被配置成抓握和操纵夹具的手柄1408。杠杆1406机械地耦合到可移动夹爪1404,并且当手柄1408相对于夹具1302处于向上定位时,夹爪间隔开,以及当杠杆1406相对于夹具1302向下移动时,可移动夹爪1404被带到更靠近固定夹爪1402从第一定位1410到第二定位1412。在一些情况下,上夹爪1402和下夹爪1404都相对于彼此可移动,但是在所示的实施例中,上夹爪1402被示为固定的,且下夹爪1404是可移动的。
194.夹具1302包括将夹具固定到插座1316的夹具耦合器1324。在一些实施例中,插座1316具有凹槽1420,该凹槽1420被配置成在其中接纳安装臂1312的一部分以便于在插座1316和安装臂1312之间的牢固附接。夹具耦合器1324提供插座1316相对于夹具1302的旋转运动。这允许夹具1302以任何角度或配置耦合到患者支撑件,并允许插座1316瞄准合适的方向以接纳安装臂1312。虽然所示的实施例示出了在插座1316和夹具1302之间的旋转耦合器,但是设想了其他形式的附接,例如球窝接头、铰链、枢轴或允许插座相对于夹具1302移动的其他结构。
195.提供了夹具调整器1342以提供对夹具1302的初始调整。例如,夹具调整器1342可用于将可移动夹爪1404移动到第一定位1410。然后,手柄1408可用于将可移动夹爪1404移
动到第二定位1412,其中患者支撑件被抓握在固定夹爪1402和可移动夹爪1404之间。在患者支撑件上的抓握不够紧的情况下,夹具1302可以从患者支撑件脱离,并且夹具调整器1342可以用于将可移动夹爪1404重新定位在第一定位1410上。然后,杠杆1406可用于将可移动夹爪1404移动到第二定位1412以将固定夹爪1402和可移动夹爪1404紧紧地接合到患者支撑件上。如在本文所使用的,可移动夹爪1404的第一定位1410与在脱离配置中的夹具相关联,以及可移动夹爪1404的第二定位1412与在接合配置中的夹具相关联。夹具调整器1342可用于改变第一定位1410,这具有当可移动夹爪1404移动到第二定位1412时改变夹紧力的效果。
196.图15a、图15b、图15c和图15d示出了与本文描述的探针安装和调整组件1600的实施例一起可使用的示例性夹具1302的内部工作。图15a和图15b示出了处于脱离配置的夹具,以及图15c和图15d示出了处于接合配置的夹具。夹具1302包括杠杆1406,其具有在其中形成的手柄1408。杠杆1406通过杠杆轴杆1502枢转地耦合到固定夹爪1402,并且被配置成在上部脱离定向和下部接合定向之间枢转。杠杆轴杆1502耦合到杠杆臂1504,杠杆臂1504又耦合到调整器块1506。调整器块1506例如通过在调整器块1506中形成与在调整器柱1508上形成的螺纹配合的内螺纹来连接到调整器柱1508。
197.在一些实施例中,杠杆轴杆1502在杠杆臂上耦合器1510处枢转地连接到杠杆臂1504,并且在杠杆臂下耦合器1518处枢转地连接到调整器块1506,以及杠杆1406围绕杠杆轴杆1502的移动引起杠杆臂上耦合器1510围绕杠杆轴杆1502的移动。杠杆臂1504枢转地耦合到调整器块1506,并且杠杆臂1504围绕杠杆轴杆1502的枢转移动引起调整器块1506的平移移动,并且因此引起调整器柱1508的平移移动。
198.可移动夹爪1404包括捕获一对夹爪柱1512的通孔,该通孔允许可移动夹爪1404在夹爪柱1512上的可滑动移动。夹爪柱1512在夹具基座1514和固定夹爪1402之间延伸。调整器块1506包括夹爪移动器1516的突出部,其被配置为接触可移动夹爪1404,以及当调整器块1506向上移动时,夹爪移动器1516接触可移动夹爪1404并在第一定位和第二定位之间移动可移动夹爪1404。调整器柱1508可以例如通过在夹具调整器1342上的指形螺钉或旋钮旋转,以根据夹具将要附接到的患者支撑件的尺寸来改变调整器块1506的第一定位。在一些实施例中,夹具1302可以具有与可移动夹爪1404的第一定位对应的标志,使得调整器柱1508和调整器块1506的调整可以针对随后的夹具或随后的手术过程重复。例如,一旦将第一夹具1302调节为将适当量的夹紧力施加到患者支撑件上,标志就可以视觉地指示夹具调整器1342的定位或设置,夹具调整器1342可以用于调整随后的夹具,例如第二夹具1304、第三夹具、第四夹具等,使得所有夹具具有到患者支撑件上的相似的夹紧力。这个夹紧方法依赖于偏心高应力联接装置以实现高夹紧力和防松(尽管闭锁锁定特征[未示出]可用于防止松脱)。在一些实施例中,当被夹到床轨上时,当杠杆1406降低时,闭合夹爪间隙(在固定夹爪1402和可移动夹爪1404之间的距离),夹爪在杠杆1406在它的“原始位置”上之前接触轨道。此时,联接装置和(固定的和可移动的)夹爪受到力,力使它们在材料的弹性变形范围内移动。这个弹性变形增加了在闭合杠杆1406上但是在联接装置的设计提供显著的杠杆臂机械优势的点处的力的“感觉”。当夹具闭合时,所有金属受到应力,且联接装置横越最大变形距离并移动到较小(但仍然显著)的变形定位。这个较小的距离需要力来在最大距离内将它移回,以便释放夹具1302。与这个夹紧的性能相关的是对固定和可移动夹爪(线性弹簧)、杠
杆臂1504(c形或s形弹簧)、杠杆轴杆1502的材料特性的考虑,包括对弹簧常数(k)、材料模量和防止达到材料的弹性屈度(其将导致部件的永久变形)的设计考虑。另外,如果上述部件是完全刚性的系统,这可能需要被设计到调整器块1506中的弹簧元件。
[0199]
图16a、图16b、图16c和图16d示出了当手柄1408在它的整个运动范围内从脱离定位分别移动到中途、移动到路途的四分之三以及移动到完全接合定位时依次示出的可以与根据一些实施例的探针安装和调整组件1600一起使用的夹具的侧视图。在使用中,夹具调整器1342用于通过转动夹具调整器1342以沿着调整器柱1508的螺纹部分推进调整器块1506来建立下夹爪1404的初始第一定位。这在杠杆1406维持在脱离定位上时允许可移动夹爪1404的初始第一定位被建立。
[0200]
杠杆臂上耦合器1510相对于杠杆轴杆1502偏移距离m,并且杠杆臂上耦合器1510围绕杠杆轴杆1502旋转。应该注意的是,如图16a所示,可移动夹爪1404远离固定夹爪1402自由向下移动,直到它接触调整器块1506为止,调整器块1506限制了可移动夹爪1404在远离固定夹爪1402的方向上的移动。当杠杆1406从图16a所示的定位移动到图16d所示的定位时,杠杆臂上耦合器1510围绕杠杆轴杆1502旋转,并从大致在杠杆轴杆1502下方的定位移动到大致在杠杆轴杆1502正上方的定位。该运动导致调整器块1506的2m距离的线性平移。相应地,调整器块1506和可移动夹爪1404也移动等于2m的线性距离。例如,在图16d中,顶销是a(杠杆臂上耦合器1510),中间销是b(杠杆轴杆1502),底销是c(杠杆臂下耦合器1518)。b位于空间中,并且相对于固定夹爪1402不可移动。a围绕b旋转,使杠杆臂1504围绕c旋转。杠杆臂1504的移动使c在y轴上平移(引起可移动夹爪移动)。可以想象,点b和c维持共线并沿着y轴(被称为bcy的轴)移动,a横穿围绕b和c的不同半径的弧。a、b和c中的每一个具有穿过它们的假想平行x线ax、bx、cx,在它们之间的距离当手柄1408移动时改变。此外,在ax和cx之间的距离是drotate(许多定位)、dmax(a最高)(这是所获得的最大力)和dlocked(a越过bc y轴)(这是持续的夹紧力)。这个设计的锁定机构依赖于当在手柄1408闭合期间在ax和cx之间的距离达到最大距离dmax时到达的锁定定位a,并且当杠杆1406进一步闭合时,在ax和cx之间的距离小于达到dlocked的dmax。这个定位依赖于越过轴bcy的a。
[0201]
夹具1302的部件可以由任何合适的材料形成,并且在一些实施例中,固定夹爪1402和可移动夹爪1404由合适的金属(例如以下中的任一个:各种钢或钢合金、铝或其他类型的金属或金属合金)形成。杠杆1406和手柄1408可以由任何合适的材料形成,并且可以是聚合材料,并且在一些情况下是增强聚合物。固定夹爪1402和可移动夹爪1404可以是任何合适的形状,并且在一些实施例中,固定夹爪1402和可移动夹爪1404中的一个或更多个是楔形的、u形的、l形的或某个其他合适的横截面形状以夹到各种患者支撑件上。在一些情况下,固定夹爪1402和可移动夹爪1404被配置成夹到被成形为管、扁平杆、卵形管的轨道或具有某个其他几何形状的轨道上。在使用中,夹具可以被固定到患者支撑件,作为在对手术过程的准备中的第一步骤。横梁1310然后可以通过安装臂和插座1316安装到夹具。
[0202]
图17a、图18b和图17c分别在后透视图、侧视图和前透视图中示出了固定到轨道1702的夹具1302。所示的夹具1302基本上如在本文其他地方所述,例如关于图16a
‑
16d所述。患者支撑件1113包括沿着其一侧的轨道1702。轨道1702可以与患者支撑件1113间隔开一定距离以允许人和物体抓握轨道1702和/或安装到其上。夹具1302可以用足够的夹紧力安装到轨道以产生与轨道1702和患者支撑件1113的牢固接合。在一些实施例中,夹具1302
具有低轮廓(low profile),并且不在患者支撑件1113的上表面之上延伸。如在本文所使用的,术语“低轮廓”用于描述不在患者支撑件1113的顶表面之上向上延伸的夹具1302。这便于在患者被放置在患者支撑件1113上之前将夹具1302附接到患者支撑件1113。低轮廓夹具不妨碍将患者放置到患者支撑件上。
[0203]
在一些实施例中,传感器1399耦合到如本文所述的一个或更多个夹具,例如被配置为耦合到轨道的夹具。在一些实施例中,传感器1399包括耦合到在轨道的每一侧上的夹具的多个传感器。传感器可以被配置成测量耦合到如本文所述的机器人臂的夹具、轨道或支撑件中的一个或更多个的负荷。
[0204]
图18a和图18b示出了具有所附接的安装臂1312、1314的横梁1310的示例性实施例的透视图,安装臂1312、1314可以与如本文所述的探针安装和调整组件1600结合来使用。横梁1310具有第一端和第二端,这两端都可以连接到安装臂1312。横梁耦合器1326将安装臂1312连接到横梁1310,并提供安装臂1312相对于横梁1310的枢转移动。横梁耦合器1326允许在探针安装和调整组件1600的设置期间进行安装臂1312的枢转移动以允许夹具1302被适当地定位在患者支撑件1113上用于夹紧,并且在一些实施例中,可以被拧紧以抵抗安装臂1312相对于横梁1310的枢转移动。横梁耦合器1326可以是允许安装臂1312的可调整性的任何合适的耦合器,并且可以包括致动器、轴承、轴杆、蜗杆传动、齿条、小齿轮、齿轮、皮带、链条、滑轮、滑块、套圈、轴杆或它们的任意组合。横梁耦合器1326还可以包括锁定机构以选择性地固定安装臂1312和横梁耦合器1326的相对定位。在一些实施例中,锁定机构包括凸轮、螺钉、手柄、旋钮、轴杆、夹具或它们的任意组合。
[0205]
机械臂基座1328可以可滑动地布置在横梁1310上,并且被配置成选择性地沿着横梁1310的长度滑动。机械臂基座1328可以通过任何安装机构(例如螺钉、凸轮、手柄、旋钮、夹具或它们的任意组合)在期望位置处选择性地固定到横梁1310。在一些实施例中,机械臂基座1328刚性地固定到横梁1310,并且沿着横梁1310不可移动。机械臂基座1328包括被配置成接收和保持机械臂442的一个、两个、三个或更多个臂底座1802,机械臂442可以是机器人臂、手动致动臂或机械和机器人致动的组合。
[0206]
在一些实施例中,机械臂基座1328包括第一臂底座1802和第二臂底座1804,第一臂底座和第二臂底座被配置成与第一机械臂和第二机械臂耦合。第一机械臂和第二机械臂可以分别支承处理探针450和成像探针460。第一臂底座和第二臂底座可以沿着横梁1310彼此间隔开固定距离。在一些情况下,在臂底座和因而在机械臂之间的固定且已知的间距可以由控制器使用来使处理探针450和成像探针460相对于彼此对准。例如,在有臂底座1802、1804的固定位置的情况下,控制器可以确定探针相对于彼此的原始位置,这也可以便于处理探针轴相对于成像探针轴的正确对准。
[0207]
机械臂通过任何合适的机构(例如螺钉、旋钮、凸轮、夹子、棘爪、夹具或任何组合)固定到臂底座。在一些实施例中,机械臂基座1328为待固定的两个机械臂提供底座,并且臂底座1802、1804可以隔开固定的距离。这便于在机械臂上安装的探针的定向和对准,并还在对探针的定位的校准方面给予帮助。
[0208]
另外参考图19a和图19b,示出了横梁1310的示例性实施例,并且示出了安装臂的运动范围连同在各种尺寸的患者支撑件上的安装配置。安装臂通过横梁耦合器1326附接到横梁1310,该横梁耦合器1326允许安装臂相对于横梁1310的枢转移动。安装臂选择性地在
第一定位1902和第二定位1904之间可移动,第一定位1902可以用于存储或在探针安装和调整组件1600的运输期间被使用,安装臂在第二定位1904上远离横梁1310旋转并相对于彼此舒展开以便于安装在患者支撑件上。安装臂1312、1314选择性地可移动越过角度α,并可在任何定向上固定。在一些实施例中,运动范围α至少为90
°
,且在一些实施例中,安装臂的运动范围为100
°
、110
°
、120
°
、130
°
、140
°
、150
°
、160
°
、170
°
或180
°
。在一些实施例中,安装臂1312、1314没有被对称地定位,且因此,角度α在安装臂之间不是一致的。例如,第一安装臂1312可以被定位在100
°
的角度α下,且第二安装臂1314可以被定位在125
°
的角度α下。
[0209]
如图19b所示,安装臂1312、1314被示为具有附接到其的夹具1302,并且安装臂可以舒展以适应具有不同宽度的患者支撑件。例如,第一患者支撑件1906具有第一宽度,并且安装臂可以舒展开第一距离以定位耦合到安装臂的夹具来安装到患者支撑件上。当安装臂旋转越过整个运动范围以适应患者支撑件宽度时,夹具可以旋转,使得夹具的夹爪与患者支撑件排在一起。当安装到具有大于第一患者支撑件的宽度的第二患者支撑件1908时,安装臂可以进一步舒展开以适应这个较大尺寸的患者支撑件。如所示,安装臂舒展开得越远,横梁1310就离患者支撑件越近。通过给安装臂提供相对于横梁1310的枢转运动的范围并允许夹具1302相对于安装臂枢转,探针安装和调整组件1600可以安装在许多不同尺寸的患者支撑件上。在一些实施例中,夹具1302可以固定到更长的安装臂,该更长的安装臂可以为了甚至更大的可调整性而与横梁1310一起使用以适合更宽尺寸的患者支撑件。
[0210]
图20示出了带有控制手柄1318的机械臂442的示例性实施例。机械臂442可以是机器人臂,并且在一个或更多个计算设备的控制下允许机器人臂和附接到其的探针的精确移动。机器人臂可以与通过接头2004耦合的两个、三个或更多个节段2002铰接。节段2002可以通过允许在相邻节段2002之间的旋转的接头2004耦合。接头2004可以是任何合适的接头,并且可以包括锁定机构以允许机械臂442的选择性移动和机械臂的锁定。接头2004可以包括锥形离合器锁定接头,并且可以包括用于便于机械臂的移动的液压装置。其他合适的接头包括单片式离合器、多片式离合器、锁定凸轮接口、互锁齿轮齿、液压致动、推杆致动、电动致动和线缆致动。每个接头2004可以包括多种运动接头(包括但不限于棱柱形、后旋、平行圆柱形、圆柱形、球形、平面、边缘滑块、圆柱形滑块、点滑块、球形滑块或交叉圆柱形接头或它们的任意组合)中的一个。此外,每个接头2004可以包括线性、正交、旋转、扭转或后旋接头或它们的任意组合。在一些实施例中,接头2004具有有限的运动范围以减少挤压危险的机会。
[0211]
机械臂442包括安装夹板2006以便于机械臂442附接到耦合到横梁1310的机械臂基座1328(图13)。机械臂442还包括被配置成接纳探针滑块1340的底座2008。探针滑块1340可以包括电机,该电机允许附接到其的探针在计算机控制下在z方向上被推进或缩回。在一些实施例中可以包括步进电机的探针滑块1340可以被配置为提供对附接到其的探针的精细控制。在一些实施例中,探针安装和调整组件1600包括两个机械臂,每个机械臂具有安装到其的探针,并且每个探针可以通过计算设备和指令在受控的z方向上被推进以启动探针滑块1340的步进电机。
[0212]
控制手柄1318附接到机械臂442,并可用于手动地操纵机械臂442。控制杠杆2010耦合到在机械臂内的每个接头2004。控制杠杆2010可以例如通过拉线、皮带、链条或诸如此类机械地耦合到接头。可选地,控制杠杆2010可以电子地耦合到接头2004。如在本文所述,
接头2004可包括致动器以允许机械臂442的机器人致动。在一些实施例中,控制杠杆2010可操作来脱离致动器并允许机械臂442的手动操纵。例如,接头2004可以包括选择性地脱离在接头2004内的致动器的离合器机构。因此,当操作者拉控制杠杆2010时,在接头中的离合器脱离致动器,并允许操作者通过在手柄1318上施加力来移动机械臂442。机械臂442可以提供围绕每个接头2004的轴的移动,并且还可以允许围绕机械臂基座1328的旋转移动。机械臂442的手动致动允许操作者在y方向(例如,竖直)和z方向(例如,更靠近或远离患者)上定位机械臂442和所附接的探针。操作者可以手动地定位附接到机械臂的探针,校准探针顶端的定位,并指示一个或更多个计算设备根据处理计划来操作机械臂。
[0213]
在一些实施例中,机械臂442的几何结构包括三个旋转接头2004,并且实现在受限的手术计划场区域内的流畅运动。在一些实施例中,机械臂442包括三个旋转接头2004,它们都允许机械臂的节段2002围绕x轴的运动。因此,机械臂442可以在yz平面中自由地移动,并且在它在xy平面中被操纵的能力方面被限制。在一些情况下,接头2004可以被解锁以允许具有低阻力的流畅移动,这允许对患者解剖结构的精确定位和触觉反馈。
[0214]
图21示出了带有所附接的探针的两个机械臂,其中两个探针在竖直平面中被对准。第一臂442和第二臂444耦合到公共基座,例如在探针安装和调整组件1600的横梁1310上支承的机械臂基座1328。第一臂和第二臂被安装并间隔开一定距离,该距离可以是由机械臂基座1328规定的固定距离。第一臂支承成像探针460,成像探针460具有成像探针轴2102。第二臂444支承处理探针450,处理探针450具有处理探针轴。如果必要,机械臂被调整以将成像探针轴2102定向为平行于处理探针轴。在一些实施例中,成像探针轴2102和处理探针轴在竖直平面中是共面的,这可以便于成像探针460和处理探针450相对于正经历手术过程的患者的解剖结构的正确定位。如关于图13所述,第二臂444可以在探针底座中合并升降器1336以将处理探针450提升到成像探针460之上,使得当成像探针轴2102和处理探针轴在竖直平面中被对准时,第一臂和第二臂444不相互干扰。成像探针轴2102和处理探针轴可以在不竖直的平面中是共面的,并且可以是基本上竖直的,以及它们可以在第一臂和第二臂444的计算机控制下被对准。
[0215]
图22示出了附接到患者支撑件1113的探针安装和调整组件1600的示例性实施例。横梁1310支承两个机械臂442、444,机械臂442、444独立地附接到横梁1310并且因此可以独立地沿着横梁1310移动。横梁1310还可以包括额外的支撑结构,例如腿2202、支架2204、撑架(stretchers)2206、交叉支架2208和脚2210。在一些实施例中,横梁1310耦合到从横梁1310延伸到地板的一个或更多个腿2202。腿2202可以是可调整的,并且被配置成支承探针安装和调整组件1600的大百分比的重量。一个或更多个腿2202可以包括脚2210以将负荷分散到地面上,并且可以包括防滑材料以减小腿2202在地板上滑动的趋势。一个或更多个撑架2206可以设置在两个或更多个腿2202之间以减小腿响应于斜力而张开的趋势。
[0216]
一个或更多个支架2208可以附接在腿2202之间以提供支撑结构的刚性。可以提供一个或更多个支架2204以例如通过将一个或更多个支架从腿的顶部连接到在夹具连接到安装臂时的位置附近的定位来增加夹具耦合器1324的刚度。与没有额外支撑结构的探针安装和调整组件相比,对腿、交叉支架、撑架、支架及它们的任意组合的使用可以被选择来增加探针安装和调整组件1600的刚度和硬度。在一些实施例中,支撑结构减少在探针安装和调整组件与患者支撑件之间的相对运动。
[0217]
附加地或可选地,一个或更多个附加夹具1302可以在合适的位置处连接到腿、撑架、横梁1310或交叉支架。除了已经被示出和描述为连接到横梁1310的端部的夹具之外,附加夹具也可以被使用,并且可以提供在探针安装和调整组件1600和患者支撑件之间的附加附接点。
[0218]
图23示出了利用在患者支撑件的一侧上的第二夹具的探针安装和调整组件1600。夹具组件可以包括用支架耦合在一起并间隔开固定距离的第一夹具1302和第二夹具1304。夹具组件被配置成例如通过夹在患者支撑件的同一轨道上来允许第一夹具1302和第二夹具1304在患者支撑件1113的同一侧上夹到轨道1702。第一夹具1302和第二夹具1304可以刚性地间隔开,或者可以在它们的相对间距方面具有可调整性以适应对不同患者支撑结构的夹紧。在第一夹具和第二夹具之间的间距是可调整的那些实施例中,一旦相对间距被选定,在夹具之间的间距就可以被刚性地固定。例如,间距可以通过螺钉、凸轮、锁、旋钮或某个其他固定结构刚性地被固定。
[0219]
类似的夹具组件可以被提供用于患者支撑件的相对侧,并被耦合到横梁1310。在这个配置中,可以有将探针安装和调整组件1600耦合到患者支撑件的四个夹具。与使用更少的夹具相比,患者支撑件的多个附接点可以减少在患者支撑件和探针安装和调整组件1600之间的相对移动。应当认识到的是,可以与所示或所述的任何其它结构(例如图22所示的结构,包括腿、撑架、支架、交叉支架和诸如此类中的一个或更多个)结合来使用图23所示的夹具组件。
[0220]
在一些实施例中,传感器1399耦合到被配置为耦合到轨道的一个或更多个夹具。在一些实施例中,传感器1399包括耦合到在轨道的每一侧上的夹具的多个传感器。传感器可以被配置成测量耦合到机器人臂的夹具、轨道或支撑件中的一个或更多个的负荷。一个或更多个传感器可以位于任何合适的位置上以测量例如在夹具、耦合到夹具的延伸部或者一个或更多个机器人臂耦合到的支撑件(例如横梁)上的负荷。在一些实施例中,如本文所述,夹具操作地耦合到一个或更多个计算设备。在一些实施例中,处理器被配置成当负荷超过阈值量时向用户生成警报。在一些实施例中,例如,传感器位于夹具的夹爪或者夹具的另一锁定结构上。在一些实施例中,例如如本文所述的压力传感器、压电传感器或应变计。
[0221]
图24示出了包括移动基座2402的如本文所述的处理系统2400的示例性实施例。处理系统包括耦合到第一机器人臂442的处理探针450以及耦合到第二机器人臂444的成像探针460。在一些情况下,处理探针450和成像探针460可以耦合到同一机器人臂,并且可以具有提供在两个探针之间的相对移动和对准的探针底座。
[0222]
第一机器人臂442和第二机器人臂444各自包括近侧端和远侧端,远侧端分别耦合到处理探针450和成像探针460,以及近侧端耦合到包括移动基座2402的公共基座。第一机器人臂442可以包括耦合到处理探针450的第一臂耦合结构,以及第二机器人臂444可以包括耦合到成像探针460的第二臂耦合结构。处理探针450可以通过探针底座耦合到第一机器人臂442的远侧端,探针底座可以包括被配置为如本文所述允许处理探针450的移动(例如旋转、平移、俯仰等)的联接装置。处理探针450与第一机器人臂442的耦合可以是固定的、可释放的或用户可调整的。类似地,成像探针460到第二机器人臂444的耦合可以是固定的、可释放的或用户可调整的。
[0223]
第一机器人臂442可以在一个或更多个臂接头2004处铰接。成像臂可以在一个或
更多个第二臂接头处铰接。每个臂接头可以与计算机可控制的致动器(例如步进电机)可操作地耦合以实现在接头处的移动。每个臂接头可以包括多种运动接头(包括但不限于棱柱形、后旋、平行圆柱形、圆柱形、球形、平面、边缘滑块、圆柱形滑块、点滑块、球形滑块或交叉圆柱形接头或它们的任意组合)中的一个。此外,每个接头2004可以包括线性、正交、旋转、扭转或后旋接头或它们的任意组合。在一些示例中,第一机器人臂442和第二机器人臂444提供臂接头2004,臂接头2004允许处理探针450和成像探针460以六个自由度以及在一些情况下以更多自由度移动。成像探针460和处理探针450的移动可以手动地、在计算机控制下机械地或者两者的组合来完成。
[0224]
处理系统还可以包括如本文所述的控制台(未示出)。控制台可以经由电力和通信线缆与移动基座2402可操作地耦合,以允许对经由第一机器人臂442耦合到移动基座的处理探针450的控制。处理控制台包括处理器和其上存储有用于由处理器执行的计算机可执行指令的存储器,以控制处理控制台的各种模块或功能,例如能量源、输注/冲洗控制、抽吸控制和如在本文别处描述的其他部件。处理控制台还可以包括与处理器通信的显示器。显示器可以被配置为显示例如下列项中的一个或更多个:受验者生命体征,例如心率、呼吸率、温度、血压、氧饱和度或任何生理参数或它们的任意组合;手术过程的状态;来自一个或更多个视图的处理部位的一个或更多个先前拍摄的图像或图像序列;由成像探针460获取的来自一个或更多个视图的处理部位的一个或更多个实时图像或图像序列;一组处理参数,包括但不限于处理模式(例如切割或凝固)、处理强度、在处理期间过去的时间、在处理期间剩余的时间、处理深度、已被处理的处理部位的面积或体积、将被处理的处理部位的面积、将不被处理的处理部位的面积或体积、处理探针450或成像探针460或两者的位置信息;处理调整控制,例如调整处理深度、处理强度、处理探针450的位置和/或定向、成像深度或成像探针460的位置和/或定向或它们的任意组合的手段;或系统配置参数。
[0225]
移动基座2402还可以包括一个或更多个计算设备以控制一个或更多个机器人臂的操作。例如,移动基座可以包括处理器和其上存储有用于由一个或更多个处理器执行的计算机可执行指令的存储器。存储器可以具有在其上存储的用于操作耦合到移动基座的一个或更多个机器人臂的指令。处理器可以经由合适的机电部件与机器人臂可操作地耦合以实现机器人臂的移动。例如,机器人臂的一个或更多个接头中的每一个可以包括步进电机,并且处理器可以在每个接头处与步进电机可操作地耦合以在指定方向上将电机致动指定增量。可选地,一个或更多个机器人臂可以与控制台或单独的成像控制台的一个或更多个处理器可操作地耦合,其中一个或更多个控制台的处理器可以被配置为执行用于控制一个或更多个机器人臂的移动的指令,并且可以经由通信电路将指令传递到机器人臂。用于控制机器人臂的移动的计算机可执行指令可以被预先编程并被存储在存储器上,或者可以在使用处理系统处理患者之前或期间由用户经由一个或更多个用户输入来提供。
[0226]
与第一机器人臂和/或第二机器人臂可操作地耦合的一个或更多个计算设备可以被配置成控制臂的移动以沿着目标部位调整处理探针450、成像探针460或两者的俯仰、偏航、滚转和/或线性定位。
[0227]
处理系统可以包括一个或更多个用户输入设备以使用户能够在计算机指令下控制机器人臂、移动基座、成像探针460、处理探针450或与处理系统相关联的任何可操作部件的移动。例如,移动基座可以包括键盘、鼠标、触摸屏、数字笔、触控板、语音控制输入和/或
脚踏开关。用户输入设备可以被配置成例如经由一个或两个机器人臂在一个或更多个接头处的铰接来控制第一机器人臂442和/或第二机器人臂444的操作。用户输入设备可以与被配置成控制机器人臂的移动的一个或更多个处理器通信。用户输入设备可以位于任何合适的位置上,例如在控制台上、在机器人臂上、在移动基座上,并且可以有与处理系统结合来使用的一个、两个、三个、四个或更多个用户输入设备以提供冗余的输入途径、独特的输入命令、控制处理系统的分立部分或它们的组合。在使用中,当用户通过用户输入设备输入指令时,用户指令可以由一个或更多个处理器接收,转换成电信号,并且电信号可以被传输到与一个或更多个机器人臂可操作地耦合的一个或更多个计算机可控致动器。用户输入设备可以控制一个或两个臂朝着或远离处理定位、感兴趣定位、预定位置或用户指定的位置或它们的任意组合的移动。
[0228]
可选地,用户输入设备可以被配置成控制处理探针450和/或成像探针460的操作。例如,用户输入设备可以被配置为利用处理探针450开始、停止、暂停或重新开始处理或者利用成像探针460开始、停止、冻结、保存或显示图像。
[0229]
移动基座还可以具有一个或更多个可展开的支撑件2404以通过产生与地板的接触来使处理系统稳定。例如,一个、两个、三个或更多个可展开支撑件可以从移动基座延伸,并且一旦移动基座用轮子被滚动就位就与地面接触。可展开支撑件2404可以从移动基座向下延伸,使得移动基座2402的轮子从地板被提升以减小处理系统可能在手术过程期间移动的可能性。当处理系统在它的定位上时,可展开支撑件2404可以被手动地致动或者被电机展开。在一些情况下,可展开支撑件2404被用户压下的脚踏板手动地致动,以将可展开支撑件展开并锁定在适当的位置上。
[0230]
处理系统可以包括电气地耦合到处理探针450、成像探针460、显示器、一个或更多个计算设备、第一机器人臂和第二机器人臂以及与处理系统相关联的其他设备的移动电源系统(例如电池电源),以允许处理系统是移动的并在自备式处理系统中从一个房间用轮子滚到另一个房间。
[0231]
处理系统可以包括被配置成检测由于碰撞处理系统或患者支撑件而引起的移动、在处理系统或操作台支撑件上的增加的压力、患者支撑件的移动或患者的移动的一个或更多个传感器。传感器可以被配置成响应于感测到的处理系统、患者支撑件或患者的移动来调整成像探针460和/或处理探针450的定位。此外,警报器可以被配置为警告操作者是否有患者支撑件的移动,并且可以被配置为在患者支撑件或患者的移动超过阈值移动幅度的情况下提供听觉、视觉或组合警报。
[0232]
在一些实施例中,移动基座设置有脚轮,并且可以包括三个、四个、五个或更多个脚轮。脚轮可以包括可以是手动的或电动的制动器,以用于限制移动基座的移动。一个或更多个脚轮可以具有在其中的电机以例如在一个或更多个计算设备的控制下允许移动基座的移动。脚轮允许移动基座在整个医院中和在处理室(例如手术室)内运输处理系统,以用于针对手术过程定位处理系统。
[0233]
移动基座支承横梁1310以将机器人臂和两个、三个、四个或更多夹具安装到患者支撑件。在一些实施例中,两个夹具由相对的可调整安装臂保持以允许夹具被定位在患者支撑件的横向侧上。根据一些实施例,额外的夹具被提供来增加在处理系统和患者支撑件之间的接合支撑件的数量,以增加在处理系统和患者支撑件之间的耦合器的刚度。例如,一
个或更多个夹具1302可以耦合到横梁1310,并被夹到患者支撑件的近侧部分上。额外的夹具可以耦合到横梁1310,并被夹到患者支撑件的其他部分(例如基座、腿、支撑件、框架、横杆或患者支撑件的其他结构)上。
[0234]
所示和所述的实施例提供了以前没有看到的许多优点。探针安装和调整组件1600的部署是有效的,可以由一个人容易地操纵,并且灵活的设计对各种各样的患者支撑件、患者演示行得通,并且提供从患者支撑件的端部偏移地安装的能力,以便于在患者支撑件的端部上安装箍筋。
[0235]
根据一些实施例,探针安装和调整组件1600的各个部件一旦被拆卸就具有小于约8lb、或小于约10lb、或小于约12lb的重量。
[0236]
图25示出了用于下列操作中的一个或更多个的系统2500:定位探针、校准探针或训练具有经校准的探针移动的系统。在一些实施例中,校准设备2502包括接收处理探针450和成像探针460的插座。插座的尺寸和形状适合接收探针并允许探针移动到在手术期间可以被使用的定位。在将探针放置在患者体内之前在经校准的移动期间可以监测臂和探针的定位。
[0237]
在一些实施例中,处理器被配置有接收探针的机械移动来建立例如用于与另一探针或另一机器人臂的碰撞避开的一个或更多个界限的指令。在一些实施例中,处理器被配置成实现“教导期”以例如在将一个或更多个探针放置在患者体内之前建立界限。在该教导期期间,也被称为校准设备的无菌保护性校准导向器2502可以被提供,以及成像探针460可以被插在其中并且用于测量几何定位数据,以用于合并到机器人臂的定位数据库中。在一些实施例中,该导向器包括以下中的一个或更多个:用于接收成像探针460的捕获腔2504、用于识别处理探针450的顶端的接触点2506、用于识别相对于成像探针460的线性轴杆位置的一个或更多个双凹口结构2508、2510、或者识别“不交叉”解剖平面的平面表面。可选地或组合地,多个相机和机器视觉软件指令可以用于测量探针相对于它们的相应原点的在3d空间中的定位,并创建在两个探针之间的可允许的相对定位的数据库。
[0238]
校准设备2502可以无菌地设置有实现定位到第一探针460上并为了第二探针450相对于第一探针460的校准而放置的特征。捕获腔2504或开放结构允许将第一探针460定位到已知定位和定向上的一种方式。第一探针460可以以在校准设备2502内的放置的受控深度在捕获腔2504内移动,并且空间边界的包络例如边界体积可以被创建并保存到数据库。
[0239]
在一些实施例中,校准设备2502包括顶端位置穴(tip location pocket)2506以检测与第二探针450的顶端的接触。当第二探针450被推进到接触点2506时,第一凹口结构2508为第二探针450的轴杆提供导向器。因此,第一凹口结构2508和触摸点2506的组合为第二探针450的放置提供指导路径,第二探针450的定位可以被存储在定位数据库中,定位数据库还存储第一探针460和第二探针450的相对位置。
[0240]
在第二探针的顶端在校准设备2502的顶端位置穴中的情况下,第二探针的轴杆可以相对于第一探针的轴杆被定位,并且信号可以被发送到处理器以记录保持第一探针和第二探针的两个臂的定位。
[0241]
类似地,第一探针460和第二探针450的轴杆可以例如通过沿着第二凹口结构2510推进第二探针450来相对于彼此移动到另一个空间定向,并且校准信号可以被发送到处理器以存储第一探针和第二探针的相对定位。
[0242]
此外,校准设备2502可以被配置为接纳第二探针特征以检测和确定第二探针450的旋转保证以及类似地检测和确定第一探针460的旋转定位,其可以用于相对于例如超声波的横向和矢状平面都对准处理探针喷嘴。
[0243]
校准设备2502因此可以提供安全的物理捕获区域以确保顶端紧靠校准设备2502的简单放置和对接,校准设备2502的定位和定向可以存储在空间数据库中以为机器人臂控制器系统教导第一探针460相对于第二探针450的相对定位和定向的可接受的空间包络。
[0244]
本文公开的方法和装置可以以多种方式被配置,并且可以包括基准点和处理器,该处理器被配置有向用户(例如外科医生)提供导向和手术指导的指令。例如,成像探针460(例如trus探针)、处理探针450、处理探针450的近侧端、成像探针460的近侧端或机器人臂中的一个或更多个可以包括导向基准点。可以用传感器检测这些导向基准点以提供处理探针450和成像探针460相对于患者和固定参考系(例如如本文所述的基座)的定位和定向信息。基准点可以包括例如反射结构、能量发射结构、线圈、磁体或视觉参考。这些基准点可以向计算导航系统提供定位信息以将错误的运动通知用户。定位信息可用于测量和控制处理和成像探针的位置和移动。位置信息也可以被显示在对用户可见的显示器上。例如,处理器可以包括在显示器上显示与在患者上的目标位置相关的处理基准点并且将患者的实时图像与目标处理轮廓实时地配准的指令。
[0245]
在一些实施例中,定位信息用于监测相对运动,并作为用于控制有意运动或对无意运动做出响应的反馈回路。
[0246]
图26示出了系统2600,其包括耦合到护套2620的臂2610、耦合到处理探针2640的机器人臂2630以及耦合到超声探针2680的臂2670。臂耦合到基座2690,基座2690可以例如包括如本文所述的任何合适的基座,例如耦合到患者支撑件的轨道的横梁。臂2610可以包括如本文所述的任何臂,并且可以例如包括机器人臂或者被配置为锁定就位的手动可调整臂。护套2610被配置为插入患者的腔(例如尿道)内,并且可以例如包括刚性护套或柔性护套。机器人臂2630可以包括如本文所述的任何合适的机器人臂。处理探针2640可以包括如本文所述的任何合适的处理探针。臂2670可以包括如本文所述的任何合适的臂,并且可以包括如本文所述的手动可锁定臂或机器人臂。超声探针2680可以包括如本文所述的任何合适的超声探针,例如trus探针。机器人臂、处理探针和超声探针操作地耦合到如本文描述的处理器。
[0247]
图27示出了如在图26中的耦合到处理探针2640的机器人臂2630和耦合到护套2620的臂2610。护套2620耦合到臂2610。在一些实施例中,护套2620包括延伸到一个或更多个开口2624以冲洗手术部位的冲洗腔2622。冲洗腔可以连接到冲洗流体(例如盐水)的源。护套可以包括尺寸适合接收处理探针的腔2626。腔2626包括近侧开口2625并延伸至远侧开口2627。在一些实施例中,护套2620包括延伸到腔2620中的开口的抽吸通道2629,以将腔2626流体地耦合到抽吸泵来移除切除产物。处理探针2640耦合到如本文所述的能量源(例如激光器、水泵或电源),并且包括能量释放结构(例如喷嘴、光纤端、孔或电极)以朝着组织引导能量。处理探针被配置成平移2646和旋转2648来自处理探针的能量2644。内窥镜2650延伸到护套中。内窥镜包括被配置为平移2654的观察口,例如内窥镜相机2652的观察口。内窥镜耦合到视频显示器以用内窥镜观察处理探针和处理部位。
[0248]
耦合器2700耦合到机器人臂2630的端部部分。耦合器2700包括一个或更多个接合
结构2710以耦合到机器人臂的端部部分。机器人臂2630包括一个或更多个相对应的接合结构2712以将耦合器2700连接到机器人臂。在一些实施例中,耦合器2700包括内部结构,例如如本文所述的联接装置和致动器,以相对于机器人臂平移处理探针、内窥镜、冲洗腔或抽吸腔中的一个或更多个。在一些实施例中,耦合器2700被配置成独立于内窥镜、冲洗腔和抽吸腔而旋转处理探针。在一些实施例中,耦合器2700包括接收处理探针并限定处理探针相对于耦合器的定向的结构。接收处理探针的结构可以包括例如耦合到联接装置的孔或通道中的一个或更多个。在一些实施例中,耦合器2700包括接合结构以耦合到机器人臂的端部部分,从而建立处理探针相对于机器人臂的端部部分的定向。
[0249]
在一些实施例中,臂或护套中的一个或更多个包括传感器2750以确定护套当被放置在患者体内时的定向。在一些实施例中,机器人臂2752包括定向传感器2752以确定耦合到机器人臂的处理探针2640的定向。可选地或与传感器组合地,机器人臂2630的接头状态可用于确定处理探针的定向,以及臂2610的接头状态可用于确定护套的定向。
[0250]
在一些实施例中,处理探针包括细长轴,并且护套包括细长轴以接收处理探针。
[0251]
该系统可以以多种方式被配置以用多种方式处理患者。在一些实施例中,护套的尺寸和形状适合插入患者体内。护套包括细长轴,并且臂耦合到护套。该处理探针包括能量源和细长轴。处理探针的尺寸和形状适合插入护套的腔内。机器人臂耦合到处理探针,并被配置成使处理探针的细长轴与护套的细长轴对准并将处理探针推进到护套内。耦合到处理探针的机器人臂被配置成在将处理探针推进到护套内之前使处理探针的轴与护套的轴对准。
[0252]
在一些实施例中,机器人臂包括传感器以确定处理探针的定向,并且传感器包括加速度计、陀螺仪或惯性测量单元(imu)中的一个或更多个。可选地或组合地,耦合到护套的臂包括传感器以确定护套的定向。传感器可以包括加速度计、陀螺仪或imu中的一个或更多个。
[0253]
在一些实施例中,护套包括接收处理探针的近侧开口以及远侧开口,并且处理探针包括足以延伸到至少远侧开口的长度。在一些实施例中,当处理探针被推进到护套中时,处理探针的尺寸被设计成使能量源延伸到至少远侧开口。
[0254]
在一些实施例中,在机器人臂的端部部分和护套之间有间隙的情况下,能量源至少延伸到远侧开口。
[0255]
虽然对旋转处理探针的耦合结构进行了参考,但是在一些实施例中机器人臂2630被配置成旋转处理探针。
[0256]
处理器可以耦合到臂2610、臂2630或臂2720中的一个或更多个。在一些实施例中,处理器被配置有将处理探针推进到护套内的指令,这可以便于处理探针与护套的对准。在一些实施例中,处理器被配置成使处理探针的细长轴与护套的细长轴对准。在一些实施例中,处理器被配置有接收指示处理探针的细长轴与护套的细长轴已经对准的输入并响应于该输入而沿着处理探针的细长轴推进处理探针的指令。该输入可以包括用户输入,或者该输入可以包括来自传感器数据的输入。在一些实施例中,耦合到刚性护套的臂包括操作地耦合到处理器的传感器以确定护套的定向,并且处理器被配置有响应于用传感器测量的刚性护套的定向而用护套将处理探针定向的指令。在一些实施例中,机器人臂包括传感器以确定处理探针的定向。可选地或组合地,可以从机器人臂的接头状态确定处理探针的定向。
在一些实施例中,从耦合到刚性护套的臂的接头状态确定护套的定向。
[0257]
图28a示出了将机器人臂2630耦合到处理探针2640的耦合器2700。在一些实施例中,耦合器2700被配置成将处理探针2740、内窥镜2650、冲洗腔2812和抽吸腔2814耦合到机器人臂。这些腔中的每一个可以由限定腔的细长管限定。在一些实施例中,冲洗腔和抽吸腔包括双腔管(例如导管)的腔。可选地,冲洗腔和抽吸腔可以包括单独的导管。
[0258]
图28b示出了由如图28a所示的耦合器提供的处理探针2640、内窥镜2650、冲洗腔2812和抽吸腔2814的移动。冲洗腔2812延伸至开口2813以释放冲洗流体。抽吸腔2814延伸至开口2814以接收切除产物。护套2620的尺寸适合接收这些腔和限定腔(例如管)的相应结构。护套2620的尺寸适合接收处理探针。在一些实施例中,护套2620的尺寸适合接收内窥镜2650。
[0259]
耦合器2700可以以多种方式被配置以移动处理探针、内窥镜、冲洗腔或抽吸腔中的一个或更多个。在一些实施例中,耦合器连接到机器人臂2630,并且机器人臂向处理探针提供运动。例如,机器人臂可以被配置成旋转处理探针。可选地或组合地,机器人臂可以被配置成旋转和平移处理臂。
[0260]
在一些实施例中,耦合器2700被配置成旋转处理探针。例如,耦合器可以被配置成旋转2648处理探针。机器人臂可以被配置成在耦合器2700旋转处理探针时平移2646处理探针。在一些实施例中,内窥镜2750被配置成随着处理探针平移2654。在一些实施例中,冲洗腔和抽吸腔被配置成随着处理探针平移。
[0261]
在一些实施例中,耦合器2700被配置成向处理探针和下列项中的一个或更多个提供独立的平移移动:内窥镜、冲洗腔或抽吸腔。在一些实施例中,耦合器被配置成向处理探针、内窥镜和下列项中的一个或更多个提供独立的平移移动:冲洗探针或抽吸探针。
[0262]
图29示出了根据一些实施例的处理方法2900。
[0263]
在步骤2910,确定护套的定向。可以从耦合到护套的一个或更多个传感器(例如在耦合到护套的臂上的定向传感器)或者从耦合到护套的臂的接头状态确定护套的定向。
[0264]
在步骤2920,确定处理探针的定向。可以从耦合到处理探针的一个或更多个传感器(例如在耦合到处理探针的臂上的定向传感器)或者从耦合到处理探针的臂的接头状态确定处理探针的定向。
[0265]
在步骤2930,处理探针的细长轴与护套的细长轴对准。这个对准可以手动地被执行。可选地,处理器可以被配置有使处理探针的细长轴与护套的细长轴对准的指令。
[0266]
在步骤2940,接收指示处理探针的细长轴与护套的细长轴已经对准的输入。该输入可以包括基于可视化的用户输入或来自传感器数据的输入或它们的组合。
[0267]
在步骤2950,响应于该输入,沿着护套的细长轴来推进处理探针。
[0268]
如在本文所描述的,本文描述和/或示出的计算设备和系统广泛地表示能够执行计算机可读指令(例如被包含在本文所描述的模块内的那些指令)的任何类型或形式的计算设备或系统。在它们的最基本的配置中,这些计算设备可以各自包括至少一个存储器设备和至少一个物理处理器。
[0269]
如本文使用的术语“存储器”或“存储器设备”通常表示能够存储数据和/或计算机可读指令的任何类型或形式的易失性或非易失性存储设备或介质。在一个示例中,存储器设备可以存储、加载和/或维护本文描述的一个或更多个模块。存储器设备的例子非限制性
地包括随机存取存储器(ram)、只读存储器(rom)、闪存、硬盘驱动器(hdd)、固态驱动器(ssd)、光盘驱动器、高速缓存、它们中的一个或更多个的变形或组合或任何其他合适的存储器。
[0270]
此外,如本文使用的术语“处理器”或“物理处理器”通常指能够解释和/或执行计算机可读指令的任何类型或形式的硬件实现的处理单元。在一个示例中,物理处理器可以访问和/或修改存储在上述存储器设备中的一个或更多个模块。物理处理器的例子非限制性地包括微处理器、微控制器、中央处理单元(cpu)、实现软核处理器的现场可编程门阵列(fpga)、专用集成电路(asic)、它们中的一个或更多个的部分、它们中的一个或更多个的变形或组合或任何其他合适的物理处理器。
[0271]
尽管被示为单独的元件,但是本文描述和/或所示的方法步骤可以表示单个应用的部分。此外,在一些实施例中,这些步骤中的一个或更多个可以表示或对应于一个或更多个软件应用或程序,其当由计算设备执行时可以使计算设备执行一个或更多个任务,例如方法步骤。
[0272]
此外,本文描述的一个或更多个设备可以将数据、物理设备和/或物理设备的表示从一种形式转换成另一种形式。此外或替代地,本文所述的一个或更多个模块可以通过在计算设备上执行、在计算设备上存储数据和/或以其他方式与计算设备交互作用来将处理器、易失性存储器、非易失性存储器和/或物理计算设备的任何其他部分从一种形式的计算设备转换为另一种形式的计算设备。
[0273]
如本文使用的术语“计算机可读介质”通常指能够存储或携带计算机可读指令的任何形式的设备、载体或介质。计算机可读介质的例子非限制性地包括传输型介质例如载波以及非暂时型介质,例如磁存储介质(例如硬盘驱动器、磁带驱动器和软盘)、光存储介质(例如光盘(cd)、数字视频盘(dvd)和蓝光盘)、电子存储介质(例如固态驱动器和闪存介质)以及其他分发系统。
[0274]
本领域中的普通技术人员将认识到,本文公开的任何过程或方法可以以多种方式被修改。本文描述和/或示出的过程参数和步骤顺序仅作为例子被给出,并且可以根据需要被改变。例如,虽然在本文示出和/或描述的步骤可以以特定的顺序被示出或讨论,但是这些步骤不一定需要以所示出或讨论的顺序被执行。
[0275]
本文描述和/或示出的各种示例性方法也可以省略本文描述或示出的一个或更多个步骤,或者包括除了那些所公开的步骤之外的附加步骤。此外,如本文公开的任何方法的步骤可以与如本文公开的任何其他方法的任一个或更多个步骤组合。
[0276]
如本文描述的处理器可以被配置成执行本文公开的任何方法的一个或更多个步骤。可选地或组合地,处理器可以被配置为组合如本文公开的一种或更多种方法的一个或更多个步骤。
[0277]
除非另有说明,如在说明书和权利要求中使用的术语“连接到”和“耦合到”(及其派生词)应被解释为既允许直接连接又允许间接(即,经由其他元件或部件)连接。此外,如在说明书和权利要求书中使用的术语“a”或“an”应被解释为
“…
中的至少一个”。最后,为了使用的容易,如在说明书和权利要求书中使用的术语“包括(including)”和“具有”(及其派生词)与词“包括(comprising)”可互换,且应具有与词“包括(comprising)”相同的含义。
[0278]
如本文公开的处理器可以被配置有指令以执行如本文公开的任何方法的任何一
个或更多个步骤。
[0279]
将理解,尽管术语“第一”、“第二”、“第三”等可以在本文用于描述各种层、元件、部件、区域或部分而不涉及事件的任何特定的顺序或序列。这些术语仅用于区分开一个层、元件、部件、区域或区段与另一个层、元件、部件、区域或区段。如本文描述的第一层、元件、部件、区域或区段可以被称为第二层、元件、部件、区域或区段而不偏离本公开的教导。
[0280]
如在本文所使用的,术语“或”被包含性地用来指替代的和组合的项目。
[0281]
如在本文所使用的,字符(例如数字)指相似的元件。
[0282]
如在本文所使用的,术语“粗略的”和“粗糙的”可互换地被使用。
[0283]
如在本文所使用的,术语“一个或更多个计算设备”和“处理器”可互换地被使用。
[0284]
本公开包括下面的被编号的条款。
[0285]
条款1.一种处理患者的组织或对患者的组织成像的系统,所述系统包括:探针,其尺寸适合插入所述患者体内;机器人臂,其被配置为耦合到所述探针;一个或更多个计算设备,其操作地耦合到所述机器人臂并且被配置有用于执行下列操作的指令:建立所述探针的可允许运动范围,所述可允许运动范围被存储在所述一个或更多个计算设备的存储器上;用所述探针处理所述患者的所述目标组织或对所述患者的所述目标组织成像;以及移动所述机器人臂以在所述探针的所述可允许运动范围内实现所述探针的移动。
[0286]
条款2.根据条款1所述的系统,其中,所述探针被配置成当所述机器人臂在被动模式中时耦合到所述机器人臂。
[0287]
条款3.根据条款1所述的系统,其中,当所述机器人臂在被动模式中时,所述探针的所述可允许运动范围被建立。
[0288]
条款4.根据条款1所述的系统,其中,建立所述探针的所述可允许运动范围包括响应于用户输入而建立所述探针的所述可允许运动范围。
[0289]
条款5.根据条款1所述的系统,其中,建立所述探针的所述可允许运动范围包括响应于所述探针的定位而建立所述探针的所述可允许运动范围。
[0290]
条款6.根据条款5所述的系统,其中,响应于在所述目标组织的一个或更多个图像中的一个或更多个组织标记而确定所述探针相对于所述目标组织的定位。
[0291]
条款7.根据条款1所述的系统,还包括实时地更新所述探针的所述可允许运动范围。
[0292]
条款8.根据条款1所述的系统,还包括用户输入设备,所述用户输入设备与一个或更多个计算设备能够操作地耦合以提供用于控制所述机器人臂的移动的一个或更多个用户指令,以及其中,在所述一个或更多个计算设备的控制下移动所述机器人臂包括响应于用于控制所述机器人臂的移动的所述一个或更多个用户指令而移动所述机器人臂。
[0293]
条款9.根据条款8所述的系统,其中,所述用户输入设备包括以下中的一个或更多个:在所述机器人臂的端部附近的控制器、在显示屏上的用户界面、在控制台上的用户界面或对由所述用户在所述机器人臂的端部上提供的力做出响应以将所述机器人臂上的探针引导就位的控制器。
[0294]
条款10.根据条款1所述的系统,还包括与所述探针和一个或更多个计算设备能够操作地耦合的一个或更多个力传感器以检测所述探针对所述患者的组织的压迫。
[0295]
条款11.根据条款10所述的系统,其中,所述一个或更多个计算设备包括被配置有
响应于检测到的对所述组织的压迫超过预定压迫阈值水平而中断所述处理的指令的处理器。
[0296]
条款12.根据条款10所述的系统,其中,所述一个或更多个力传感器操作地耦合到所述机器人臂。
[0297]
条款13.根据条款12所述的系统,还包括与所述探针和所述一个或更多个计算设备能够操作地耦合的一个或更多个运动传感器以检测所述患者的移动,以及其中,所述一个或更多个计算设备被配置为响应于所检测到的所述患者的移动而调整所述探针的定位。
[0298]
条款14.根据条款1所述的系统,其中,所述机器人臂包括被动模式以将所述探针手动地调整到手动设置定位。
[0299]
条款15.根据条款14所述的系统,其中,在所述被动模式中所述探针用所述机器人臂支撑,以及所述探针包括在所述机器人臂和所述探针之间的接口处的多个传感器以从耦合到所述多个传感器的手柄接收用户输入以用于所述用户引导所述探针。
[0300]
条款16.根据条款15所述的系统,其中,耦合到所述多个传感器的手柄被配置成接收所述手柄的用户操纵,以及在所述接口处的所述多个传感器耦合到所述一个或更多个计算设备的处理器以响应于所述手柄的所述用户操纵来操纵所述探针。
[0301]
条款17.根据条款16所述的系统,其中,所述多个传感器被配置为以6个自由度检测所述手柄的用户操纵,以及其中,所述处理器被配置为响应于所述用户操纵,用对应于所述6个自由度的运动以6个自由度移动所述探针。
[0302]
条款18.根据条款14所述的系统,其中,在所述被动模式中手动地调整所述机器人臂包括在至少一个旋转轴或至少一个平移轴中的一个或更多个上手动地调整所述探针。
[0303]
条款19.根据条款18所述的系统,其中,所述至少一个旋转轴包括第一旋转轴、正交于所述第一旋转轴的第二旋转轴和正交于所述第一旋转轴和所述第二旋转轴的第三旋转轴,以及其中,所述至少一个平移轴包括第一平移轴、正交于所述第一平移轴的第二平移轴和正交于所述第一平移轴和所述第二平移轴的第三平移轴。
[0304]
条款20.根据条款19所述的系统,其中,所述第一旋转轴包括俯仰轴,所述第二旋转轴包括偏航轴,所述第三旋转轴包括滚转轴,所述第一平移轴包括x轴,所述第二平移轴包括y轴,以及所述第三平移轴包括z轴。
[0305]
条款21.根据条款14所述的系统,其中,在所述机器人臂从手动调整被释放之后,所述探针的所述手动设置定位被维持。
[0306]
条款22.根据条款21所述的系统,其中,所述机器人臂被配置成以在旋转轴或平移轴中的一个或更多个上的容差维持所述手动设置定位,以及可选地,其中,所述容差对于围绕三个轴中的一个或更多个的旋转是在5
°
内,以及对于沿着三个轴中的一个或更多个轴和可选地对于三个轴中的一个或更多个轴中的每个轴的平移是在5mm内,以及可选地,其中,旋转容差在3
°
内,以及可选地,其中,平移容差在3mm内和可选地在2mm内。
[0307]
条款23.根据条款21所述的系统,其中,所述探针包括成像探针。
[0308]
条款24.根据条款21所述的系统,其中,所述探针包括处理探针,以及所述机器人臂包括第一机器人臂,所述系统还包括:成像探针,所述成像探针的尺寸适合插入所述患者体内;第二机器人臂,所述第二机器人臂耦合到所述成像探针;以及其中,所述一个或更多个计算设备被配置有用于建立所述成像探针的可允许运动范围的指令。
[0309]
条款25.根据条款24所述的系统,其中,所述成像设备被配置为用所述成像探针对所述患者的所述目标部位成像,以及其中,所述第二机器人臂被配置为在所述一个或更多个计算设备的控制下移动以在所述成像探针的所述可允许运动范围内实现所述成像探针的移动。
[0310]
条款26.根据条款1所述的系统,其中,所述一个或更多个计算设备包括用于对所述组织的成像和处理的指令。
[0311]
条款27.一种处理在患者的目标部位处的目标组织的方法,所述方法包括:将探针手动地插入所述患者体内;将所述探针耦合到机器人臂;建立所述探针的可允许运动范围,所述可允许运动范围存储在与所述机器人臂能够操作地耦合的一个或更多个计算设备的存储器上;用所述探针处理所述患者的所述目标组织或对所述患者的所述目标组织成像;以及在与所述探针能够操作地耦合的所述一个或更多个计算设备的控制下移动所述机器人臂,以在所述探针的所述可允许运动范围内实现所述探针的移动。
[0312]
条款28.根据条款27所述的方法,其中,当所述机器人臂在被动模式中时,所述探针耦合到所述机器人臂。
[0313]
条款29.根据条款27所述的方法,其中,当所述机器人臂在被动模式中时,所述探针的所述可允许运动范围被建立。
[0314]
条款30.根据条款27所述的方法,其中,建立所述探针的所述可允许运动范围包括响应于用户输入而建立所述探针的所述可允许运动范围。
[0315]
条款31.根据条款27所述的方法,其中,建立所述探针的所述可允许运动范围包括响应于所述探针的定位而建立所述探针的所述可允许运动范围。
[0316]
条款32.根据条款31所述的方法,其中,响应于在所述目标组织的一个或更多个图像中的一个或更多个组织标记而确定所述探针相对于所述目标组织的定位。
[0317]
条款33.根据条款27所述的方法,还包括实时地更新所述探针的所述可允许运动范围。
[0318]
条款34.根据条款27所述的方法,还包括从与一个或更多个计算设备能够操作地耦合的用户输入设备接收用于控制所述机器人臂的移动的一个或更多个用户指令,以及其中,在所述一个或更多个计算设备的控制下移动所述机器人臂包括响应于用于控制所述机器人臂的移动的所述一个或更多个用户指令,移动所述机器人臂。
[0319]
条款35.根据条款34所述的方法,其中,所述用户输入设备包括以下中的一个或更多个:在所述机器人臂的端部上的控制器、在显示屏上的用户界面、在控制台上的用户界面或者对由所述用户在所述机器人臂的端部上提供的力做出响应以将所述机器人臂上的探针引导就位的控制器。
[0320]
条款36.根据条款27所述的方法,还包括从与所述一个或更多个计算设备能够操作地耦合的一个或更多个力传感器接收传感器数据,所述一个或更多个力传感器被配置为检测所述探针对所述患者的组织的压迫。
[0321]
条款37.根据条款36所述的方法,其中,所述一个或更多个计算设备包括被配置有响应于检测到对所述组织的压迫超过预定压迫阈值水平而中断所述处理的指令的处理器。
[0322]
条款38.根据条款36所述的方法,其中,所述一个或更多个力传感器能够操作地耦合到所述机器人臂。
[0323]
条款39.根据条款38所述的方法,还包括从与所述一个或更多个计算设备能够操作地耦合并被配置为检测所述患者的移动的一个或更多个运动传感器接收传感器数据,以及其中,在所述一个或更多个计算设备的控制下移动所述机器人臂包括响应于所检测到的所述患者的移动,调整所述探针的定位。
[0324]
条款40.根据条款27所述的方法,还包括在被动模式中手动地调整所述机器人臂以将所述探针手动地调整到手动设置定位。
[0325]
条款41.根据条款40所述的方法,其中,在所述被动模式中所述探针用所述机器人臂支撑,以及所述探针包括在所述机器人臂和所述探针之间的接口处的多个传感器以从耦合到所述多个传感器的手柄接收用户输入以用于所述用户引导所述探针。
[0326]
条款42.根据条款41所述的方法,其中,耦合到所述多个传感器的手柄被配置成接收所述手柄的用户操纵,以及在所述接口处的所述多个传感器耦合到所述一个或更多个计算设备的处理器以响应于所述手柄的所述用户操纵来操纵所述探针。
[0327]
条款43.根据条款42所述的方法,其中,所述多个传感器被配置为以6个自由度检测所述手柄的用户操纵,以及其中,所述处理器被配置为响应于所述用户操纵,用对应于所述6个自由度的运动以6个自由度移动所述探针。
[0328]
条款44.根据条款40所述的方法,其中,在所述被动模式中手动地调整所述机器人臂以手动地调整所述探针包括在至少一个旋转轴或至少一个平移轴中的一个或更多个轴上手动地调整所述探针。
[0329]
条款45.根据条款44所述的方法,其中,所述至少一个旋转轴包括第一旋转轴、正交于所述第一旋转轴的第二旋转轴和正交于所述第一旋转轴和第二旋转轴的第三旋转轴,以及其中,所述至少一个平移轴包括第一平移轴、正交于所述第一平移轴的第二平移轴和正交于所述第一平移轴和第二平移轴的第三平移轴。
[0330]
条款46.根据条款45所述的方法,其中,所述第一旋转轴包括俯仰轴,所述第二旋转轴包括偏航轴,所述第三旋转轴包括滚转轴,所述第一平移轴包括x轴,所述第二平移轴包括y轴,以及所述第三平移轴包括z轴。
[0331]
条款47.根据条款40所述的方法,其中,在所述机器人臂从手动调整被释放之后,所述探针的手动设置定位被维持。
[0332]
条款48.根据条款47所述的方法,其中,所述机器人臂被配置成以在旋转轴或平移轴中的一个或更多个轴上的容差维持所述手动设置定位,以及可选地,其中,所述容差对于围绕三个轴中的一个或更多个轴的旋转是在5
°
内,以及对于沿着三个轴中的一个或更多个轴和可选地对于三个轴中的一个或更多个轴中的每个轴的平移是在5mm内,以及可选地,其中,旋转容差在3
°
内,以及可选地,其中,平移容差在3mm内和可选地在2mm内。
[0333]
条款49.根据条款27所述的方法,其中,所述探针包括成像探针。
[0334]
条款50.根据条款47所述的方法,其中,所述探针包括处理探针,以及所述机器人臂包括第一机器人臂,所述方法还包括:将成像探针手动地插入所述患者体内;将所述成像探针耦合到第二机器人臂;以及建立所述成像探针的可允许运动范围,所述可允许运动范围被存储在与所述第一机器人臂和所述第二机器人臂能够操作地耦合的所述一个或更多个计算设备的存储器上。
[0335]
条款51.根据条款50所述的方法,其中,当所述第二机器人臂在被动模式中时,所
述成像探针耦合到所述第二机器人臂。
[0336]
条款52.根据条款50所述的方法,其中,当所述第二机器人臂在被动模式中时,所述成像探针的所述可允许运动范围被建立。
[0337]
条款53.根据条款50所述的方法,其中,建立所述成像探针的所述可允许运动范围包括响应于在所述处理探针和所述成像探针之间的距离或对准而建立所述可允许运动范围。
[0338]
条款54.根据条款50所述的方法,其中,建立所述成像探针的所述可允许运动范围包括响应于用户输入而建立所述成像探针的所述可允许运动范围。
[0339]
条款55.根据条款50所述的方法,其中,建立所述成像探针的所述可允许运动范围包括响应于所述成像探针相对于所述目标组织的定位而建立所述可允许运动范围。
[0340]
条款56.根据条款55所述的方法,其中,响应于在所述目标组织的一个或更多个图像中的一个或更多个组织标记,确定所述成像探针相对于所述目标组织的定位。
[0341]
条款57.根据条款50所述的方法,还包括实时地更新所述成像探针的所述可允许运动范围。
[0342]
条款58.根据条款50所述的方法,还包括从与一个或更多个计算设备能够操作地耦合的用户输入设备接收用于控制所述第二机器人臂的移动的一个或更多个用户指令,以及其中,在所述一个或更多个计算设备的控制下移动所述第二机器人臂包括响应于用于控制所述第二机器人臂的移动的所述一个或更多个用户指令,移动所述第二机器人臂。
[0343]
条款59.根据条款58所述的方法,还包括响应于用于控制所述第二机器人臂的移动的所述一个或更多个用户指令,建立所述第二机器人臂的可允许运动范围。
[0344]
条款60.根据条款50所述的方法,还包括从与所述一个或更多个计算设备能够操作地耦合并被配置为用所述成像探针检测对所述患者的组织的压迫的一个或更多个力传感器接收传感器数据,以及其中,在所述一个或更多个计算设备的控制下移动所述第二机器人臂包括响应于确定所检测到的对所述组织的压迫超过预定压迫阈值水平,而远离所述组织移动所述成像探针。
[0345]
条款61.根据条款60所述的方法,其中,所述一个或更多个力传感器能够操作地耦合到所述第二机器人臂。
[0346]
条款62.根据条款50所述的方法,还包括从与所述一个或更多个计算设备能够操作地耦合并被配置为检测所述第一机器人臂、所述处理探针、所述第二机器人臂或所述成像探针的一个或更多个定位的一个或更多个定位传感器接收传感器数据。
[0347]
条款63.根据条款50所述的方法,还包括从与所述一个或更多个计算设备能够操作地耦合并被配置为检测所述患者的移动的一个或更多个运动传感器接收传感器数据,以及其中,在所述一个或更多个计算设备的控制下移动所述第二机器人臂包括响应于所检测到的所述患者的移动,而调整所述成像探针的定位。
[0348]
条款64.根据条款50所述的方法,还包括校准所述第一机器人臂以识别所述第一机器人臂相对于所述第二机器人臂的定位,以及校准所述第二机器人臂以识别所述第二机器人臂相对于所述第一机器人臂的定位。
[0349]
条款65.根据条款50所述的方法,其中,在所述一个或更多个计算设备的控制下移动所述第一机器人臂或所述第二机器人臂包括响应于所述第二机器人臂的移动而自动调
整所述第一机器人臂的移动或者响应于所述第一机器人臂的移动而自动调整所述第二机器人臂的移动。
[0350]
条款66.根据条款50所述的方法,其中,在所述一个或更多个计算设备的控制下移动所述第一机器人臂或所述第二机器人臂包括移动所述第一机器人臂或所述第二机器人臂以防止在所述处理探针和所述成像探针的布置在所述患者体外的部分之间的接触。
[0351]
条款67.根据条款66所述的方法,其中,在所述一个或更多个计算设备的控制下移动所述第一机器人臂或所述第二机器人臂包括移动所述第一机器人臂或所述第二机器人臂以维持在所述处理探针和所述成像探针之间的对准。
[0352]
条款68.根据条款67所述的方法,其中,在所述处理探针和所述成像探针之间维持的对准包括在所述处理探针和所述成像探针之间的平行对准,其中,所述处理探针和所述成像探针的纵轴彼此平行。
[0353]
条款69.根据条款67所述的方法,其中,在所述处理探针和所述成像探针之间维持的对准包括在所述处理探针和所述成像探针之间的共面对准,其中,所述处理探针和所述成像探针的纵轴彼此共面。
[0354]
条款70.根据条款67所述的方法,其中,在所述处理探针和所述成像探针之间维持的对准包括在所述处理探针和所述成像探针之间的非平行对准,其中,所述处理探针和所述成像探针的纵轴彼此横向。
[0355]
条款71.根据条款50所述的方法,还包括检测在所述处理探针和所述成像探针之间的距离或对准中的一个或更多个。
[0356]
条款72.根据条款50所述的方法,其中,在所述一个或更多个计算设备的控制下移动所述第一机器人臂或所述第二机器人臂包括移动所述第一机器人臂或所述第二机器人臂以沿着存储在所述一个或更多个计算设备上的扫描轮廓自动移动所述处理探针或所述成像探针。
[0357]
条款73.根据条款72所述的方法,其中,在所述一个或更多个计算设备的控制下移动所述第一机器人臂包括移动所述第一机器人臂以按包括处理轮廓的所述扫描轮廓自动移动所述处理探针。
[0358]
条款74.根据条款72所述的方法,其中,在所述一个或更多个计算设备的控制下移动所述第二机器人臂包括移动所述第二机器人臂以按包括成像轮廓的所述扫描轮廓自动移动所述成像探针。
[0359]
条款75.根据条款74所述的方法,其中,所述成像轮廓包括所述目标部位的多个横向视图扫描或多个矢状视图扫描,以及其中,方法还包括生成所述目标部位的三维图像。
[0360]
条款76.根据条款74所述的方法,其中,当所述处理探针处理所述目标组织时,所述第二机器人臂被移动以按包括所述成像轮廓的所述扫描轮廓自动移动所述成像探针。
[0361]
条款77.根据条款50所述的方法,其中,用所述成像探针对所述目标部位成像包括用在多普勒模式中操作的所述成像探针对所述目标部位成像,以及其中,所述方法还包括基于所述目标部位的用所述成像探针获得的一个或更多个图像来识别在所述目标部位中的高血流的区域。
[0362]
条款78.根据条款77所述的方法,还包括对识别出的在所述目标部位中的高血流区域施加止血。
[0363]
条款79.根据条款77所述的方法,还包括执行对位于识别出的所述目标部位中的高血流区域处的组织的活组织检查。
[0364]
条款80.根据条款77所述的方法,还包括将高血流区域识别为癌组织。
[0365]
条款81.根据条款77所述的方法,其中,用所述成像探针对所述目标部位成像包括旋转所述成像探针。
[0366]
条款82.根据条款50所述的方法,其中,用所述成像探针对所述目标部位成像包括生成所述目标部位的术中图像。
[0367]
条款83.根据条款82所述的方法,还包括将所述目标部位的所述术中图像与术前图像进行映射。
[0368]
条款84.根据条款83所述的方法,其中,所述目标部位的所述术前图像包括x射线图像、荧光图像、计算机断层扫描(ct)图像、超声图像或mri图像中的一个或更多个。
[0369]
条款85.根据条款83所述的方法,其中,将所述术中图像与所述术前图像进行映射包括将在所述术中图像和术前图像内的一个或更多个解剖区域彼此进行映射。
[0370]
条款86.根据条款85所述的方法,其中,所述一个或更多个解剖区域包括以下中的一个或更多个:膀胱颈、外括约肌或精阜。
[0371]
条款87.一种操作机器人臂以对在患者的目标部位处的目标组织成像或处理所述目标组织的方法,所述方法包括:将至少一个探针耦合到至少一个机器人臂;在被动模式中手动地调整所述至少一个机器人臂以将所述至少一个探针手动地调整到手动设置定位;以及从所述被动模式释放所述至少一个机器人臂;其中,在从手动调整释放之后所述至少一个机器人臂维持所述至少一个探针的所述手动设置定位;以及其中,所述至少一个探针从所维持的手动设置定位执行下列操作中的一个或多个:对在所述患者的所述目标部位处的所述目标组织成像或处理所述目标组织。
[0372]
条款88.根据条款87所述的方法,其中,在将所述至少一个探针插入所述患者体内之前,将所述至少一个探针耦合到所述至少一个机器人臂。
[0373]
条款89.根据条款87所述的方法,其中,在将所述至少一个探针插入所述患者体内之后,将所述至少一个探针耦合到所述至少一个机器人臂。
[0374]
条款90.根据条款87所述的方法,其中,所述至少一个机器人臂用所述至少一个机器人臂的锁定配置来维持所述至少一个探针的所述手动设置定位,以及可选地,其中,所述至少一个机器人臂的接头的传感器和耦合到所述机器人臂的所述接头的致动器将所述至少一个机器人臂的所述手动设置定位维持在所述锁定配置中。
[0375]
条款91.根据条款87所述的方法,其中,在所述被动模式中手动地调整所述至少一个机器人臂包括在至少一个旋转轴或至少一个平移轴中的一个或更多个轴上手动地调整所述至少一个探针。
[0376]
条款92.根据条款91所述的方法,其中,所述至少一个旋转轴包括第一旋转轴、正交于所述第一旋转轴的第二旋转轴和正交于所述第一旋转轴和第二旋转轴的第三旋转轴,以及其中,所述至少一个平移轴包括第一平移轴、正交于所述第一平移轴的第二平移轴和正交于所述第一平移轴和第二平移轴的第三平移轴。
[0377]
条款93.根据条款92所述的方法,其中,所述第一旋转轴包括俯仰轴,所述第二旋转轴包括偏航轴,所述第三旋转轴包括滚转轴,所述第一平移轴包括x轴,所述第二平移轴
包括y轴,以及所述第三平移轴包括z轴。
[0378]
条款94.根据条款87所述的方法,其中,所述至少一个机器人臂将所述手动设置定位维持在旋转轴或平移轴中的一个或更多个轴上的容差内,以及可选地,其中,所述容差对于围绕三个轴中的一个或更多个轴的旋转是在5
°
内,以及对于沿着三个轴中的一个或更多个轴和可选地对于三个轴中的一个或更多个轴中的每个轴的平移是在5mm内,以及可选地,其中,旋转容差在3
°
内,以及可选地,其中,平移容差在3mm内和可选地在2mm内。
[0379]
条款95.根据条款87所述的方法,其中,将所述至少一个探针耦合到所述至少一个机器人臂包括下列操作中的一个或更多个:将处理探针耦合到第一机器人臂或者将成像探针耦合到第二机器人臂。
[0380]
条款96.根据条款95所述的方法,其中,在所述被动模式中手动地调整所述至少一个机器人臂包括使所述处理探针和所述成像探针彼此对准。
[0381]
条款97.根据条款96所述的方法,其中,所述处理探针和所述成像探针彼此对准成下列情况中的一个或更多个:平行的或共面的。
[0382]
条款98.根据条款96所述的方法,其中,在从手动调整释放之后,所述至少一个机器人臂维持在所述成像探针和所述处理探针之间的对准。
[0383]
条款99.根据条款98所述的方法,其中,在所述成像探针和所述处理探针之间的对准被维持在旋转轴或平移轴中的一个或更多个轴上的容差内,以及可选地,其中,所述容差对于围绕三个轴中的一个或更多个轴的旋转是在5
°
内,以及对于沿着三个轴中的一个或更多个轴和可选地对于三个轴中的一个或更多个轴中的每个轴的平移是在5mm内,以及可选地,其中,旋转容差在3
°
内,以及可选地,其中,平移容差在3mm内和可选地在2mm内。
[0384]
条款100.一种系统,包括:处理器,其被配置有执行前述条款中的任一项所述的方法的指令。
[0385]
条款101.一种用于操作机器人臂以对在患者的目标部位处的目标组织成像或处理所述目标组织的系统,所述系统包括:至少一个机器人臂,其耦合到至少一个探针,以用于下列操作中的一个或更多个:处理所述患者的所述目标组织或对所述目标组织成像;以及一个或更多个计算设备,其与所述至少一个机器人臂能够操作地耦合,所述一个或更多个计算设备被配置为执行用于下列操作的指令:在被动模式中操作所述至少一个机器人臂,使得所述至少一个机器人臂能够手动地被调整以将所述至少一个探针手动地调整到手动设置定位;在所述至少一个探针手动地被调整到所述手动设置定位之后,从所述被动模式释放所述至少一个机器人臂;以及在从手动调整释放之后,维持所述至少一个探针的所述手动设置定位。
[0386]
条款102.根据条款101所述的系统,其中,所述至少一个探针被配置为在将所述至少一个探针插入所述患者体内之前耦合到所述至少一个机器人臂。
[0387]
条款103.根据条款101所述的系统,其中,所述至少一个探针被配置为在将所述至少一个探针插入所述患者体内之后耦合到所述至少一个机器人臂。
[0388]
条款104.根据条款101所述的系统,其中,所述至少一个机器人臂用所述至少一个机器人臂的锁定配置来维持所述至少一个探针的所述手动设置定位,以及可选地,其中,所述至少一个机器人臂的接头的传感器和耦合到所述机器人臂的所述接头的致动器将所述至少一个机器人臂的所述手动设置定位维持在所述锁定配置中。
[0389]
条款105.根据条款101所述的系统,其中,所述一个或更多个计算设备还被配置为执行用于控制所述至少一个机器人臂的移动的指令。
[0390]
条款106.根据条款101所述的系统,其中,所述至少一个机器人臂被配置为手动地被调整以在至少一个旋转轴或至少一个平移轴中的一个或更多个轴上手动地调整所述至少一个探针。
[0391]
条款107.根据条款106所述的系统,其中,所述至少一个旋转轴包括第一旋转轴、正交于所述第一旋转轴的第二旋转轴和正交于所述第一旋转轴和第二旋转轴的第三旋转轴,以及其中,所述至少一个平移轴包括第一平移轴、正交于所述第一平移轴的第二平移轴和正交于所述第一平移轴和第二平移轴的第三平移轴。
[0392]
条款108.根据条款107所述的系统,其中,所述第一旋转轴包括俯仰轴,所述第二旋转轴包括偏航轴,所述第三旋转轴包括滚转轴,所述第一平移轴包括x轴,所述第二平移轴包括y轴,以及所述第三平移轴包括z轴。
[0393]
条款109.根据条款106所述的系统,其中,所述至少一个机器人臂被配置成以在旋转轴或平移轴中的一个或更多个上的容差维持所述手动设置定位,以及可选地,其中,所述容差对于围绕三个轴中的一个或更多个轴的旋转是在5
°
内,以及对于沿着三个轴中的一个或更多个轴和可选地对于三个轴中的一个或更多个轴中的每个轴的平移是在5mm内,以及可选地,其中,旋转容差在3
°
内,以及可选地,其中,平移容差在3mm内和可选地在2mm内。
[0394]
条款110.根据条款101所述的系统,其中,所述至少一个探针包括处理探针或成像探针中的一个或更多个。
[0395]
条款111.根据条款110所述的系统,其中,所述至少一个探针包括所述处理探针和所述成像探针,以及其中,所述至少一个机器人臂包括耦合到所述处理探针的第一机器人臂和耦合到所述成像探针的第二机器人臂。
[0396]
条款112.根据条款110所述的系统,其中,所述至少一个探针包括所述处理探针和所述成像探针,以及其中,所述处理探针和所述成像探针被配置为手动地被调整以使所述处理探针和所述成像探针彼此对准。
[0397]
条款113.根据条款112所述的系统,其中,所述处理探针和所述成像探针彼此对准成下列情况中的一个或更多个:平行的或共面的。
[0398]
条款114.根据条款113所述的系统,其中,所述至少一个机器人臂在从手动调整释放之后维持在所述成像探针和处理探针之间的对准。
[0399]
条款115.根据条款114所述的系统,其中,在所述成像探针和处理探针之间的对准被维持在旋转轴或平移轴中的一个或更多个上的容差内。
[0400]
条款116.一种用于处理在患者的目标部位处的目标组织的系统,所述系统包括:第一机器人臂,其耦合到用于处理所述患者的所述目标组织的处理探针;第二机器人臂,其耦合到用于对所述患者的所述目标组织成像的成像探针;以及一个或更多个计算设备,所述一个或更多个计算设备与所述第一机器人臂和所述第二机器人臂能够操作地耦合,所述一个或更多个计算设备被配置为执行用于控制所述第一机器人臂或所述第二机器人臂中的一个或更多个的移动的指令。
[0401]
条款117.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行用于控制所述第一机器人臂或所述第二机器人臂的移动以沿着所述处理探针或所述成
像探针到所述患者体内的进入轴调整所述处理探针或所述成像探针的俯仰、偏航、滚转或线性定位中的一个或更多个的指令。
[0402]
条款118.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行包括控制所述第一机器人臂或所述第二机器人臂的移动以沿着所述进入轴分别缩回所述处理探针或所述成像探针的指令。
[0403]
条款119.根据条款118所述的系统,其中,所述一个或更多个计算设备被配置成执行包括控制所述第一机器人臂或所述第二机器人臂的移动以沿着所述进入轴分别缩回而不是推进所述处理探针或所述成像探针的指令。
[0404]
条款120.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行包括响应于用与所述一个或更多个计算设备能够操作地耦合的用户输入设备接收到的用户指令而控制所述第一机器人臂或所述第二机器人臂的移动的指令。
[0405]
条款121.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行包括控制所述第一机器人臂或所述第二机器人臂的移动以在存储在所述一个或更多个计算设备中的所述处理探针或所述成像探针的可允许运动范围内分别移动所述处理探针或所述成像探针的指令。
[0406]
条款122.根据条款121所述的系统,其中,所述一个或更多个计算设备被配置为执行包括响应于用户输入而建立所述处理探针或所述成像探针的所述可允许运动范围的指令。
[0407]
条款123.根据条款121所述的系统,其中,所述一个或更多个计算设备被配置为执行包括响应于在所述处理探针和所述成像探针之间的距离或对准而建立所述处理探针或所述成像探针的所述可允许运动范围的指令。
[0408]
条款124.根据条款121所述的系统,其中,所述一个或更多个计算设备被配置为执行包括响应于所述处理探针或所述成像探针相对于所述目标组织的定位而建立所述处理探针或所述成像探针的所述可允许运动范围的指令。
[0409]
条款125.根据条款124所述的系统,其中,所述一个或更多个计算设备被配置为执行包括基于所述目标组织的一个或更多个图像来检测所述处理探针或所述成像探针相对于所述目标组织的定位的指令,所述一个或更多个图像包括一个或更多个组织标记。
[0410]
条款126.根据条款121所述的系统,其中,所述一个或更多个计算设备被配置成执行用于实时地更新所述处理探针或所述成像探针的所述可允许运动范围的指令。
[0411]
条款127.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行包括控制所述第一机器人臂或所述第二机器人臂的移动以维持在所述处理探针和所述成像探针之间的对准的指令,以及可选地,其中,所述对准将所述处理探针维持在所述成像探针的视野内。
[0412]
条款128.根据条款127所述的系统,其中,在所述处理探针和所述成像探针之间维持的对准包括在所述处理探针和所述成像探针之间基本上平行的对准,其中,所述处理探针和所述成像探针的纵轴基本上彼此平行。
[0413]
条款129.根据条款127所述的系统,其中,在所述处理探针和所述成像探针之间维持的对准包括在所述处理探针和所述成像探针之间的共面对准,其中,所述处理探针和所述成像探针的纵轴彼此共面。
[0414]
条款130.根据条款127所述的系统,其中,在所述处理探针和所述成像探针之间维持的对准包括在所述处理探针和所述成像探针之间的非平行对准,其中,所述处理探针和所述成像探针的纵轴彼此横向。
[0415]
条款131.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行包括检测在所述处理探针和所述成像探针之间的距离或对准中的一个或更多个的指令。
[0416]
条款132.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行包括控制所述第一机器人臂或所述第二机器人臂的移动以防止在所述处理探针和所述成像探针的布置在所述患者体外的部分之间的接触的指令。
[0417]
条款133.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行响应于所述第二机器人臂的移动而自动调整所述第一机器人臂的移动的指令。
[0418]
条款134.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行用于响应于所述第一机器人臂的定位而自动调整所述第二机器人臂的移动的指令,以及可选地,其中,所述第二机器人臂响应于所述处理探针的定位而移动所述成像探针以将所述处理探针维持在所述成像探针的视野内。
[0419]
条款135.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行用于控制所述第一机器人臂或所述第二机器人臂的移动以沿着存储在所述一个或更多个计算设备上的扫描轮廓自动移动所述处理探针或所述成像探针的指令。
[0420]
条款136.根据条款135所述的系统,其中,所述一个或更多个计算设备被配置为执行用于控制所述第一机器人臂的移动以沿着包括处理轮廓的所述扫描轮廓自动移动所述处理探针的指令。
[0421]
条款137.根据条款135所述的系统,其中,所述一个或更多个计算设备被配置为执行用于控制所述第二机器人臂的移动以沿着包括成像轮廓的所述扫描轮廓自动移动所述成像探针的指令。
[0422]
条款138.根据条款137所述的系统,其中,所述成像轮廓包括所述目标部位的多个横向视图扫描或多个矢状视图扫描,以及其中,所述一个或更多个计算设备还被配置为执行包括生成所述目标部位的三维图像的指令。
[0423]
条款139.根据条款137所述的系统,其中,所述一个或更多个计算设备被配置为执行在所述处理探针处理所述目标组织时沿着包括所述成像轮廓的所述扫描轮廓自动移动所述成像探针的指令。
[0424]
条款140.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行包括响应于从与所述一个或更多个计算设备能够操作地耦合的一个或更多个传感器接收的传感器数据而控制所述第一机器人臂或所述第二机器人臂的移动的指令。
[0425]
条款141.根据条款140所述的系统,其中,所述一个或更多个传感器操作地耦合到所述第一机器人臂或第二机器人臂中的一个或更多个。
[0426]
条款142.根据条款140所述的系统,其中,所述一个或更多个传感器包括耦合到所述第一机器人臂、所述处理探针、所述第二机器人臂或所述成像探针中的一个或更多个的一个或更多个定位传感器。
[0427]
条款143.根据条款140所述的系统,其中,所述一个或更多个传感器包括被配置为检测用所述处理探针或所述成像探针对所述患者的组织的压迫的一个或更多个力传感器,
以及其中,所述一个或更多个计算设备被配置为执行包括响应于确定所检测到的对所述组织的压迫超过预定压迫阈值水平而远离所述组织移动所述处理探针或所述成像探针的指令。
[0428]
条款144.根据条款140所述的系统,其中,所述一个或更多个传感器包括被配置为检测所述患者的移动的一个或更多个运动传感器,以及其中,所述一个或更多个计算设备被配置为执行包括响应于所检测到的所述患者的移动而调整所述处理探针或所述成像探针的定位的指令。
[0429]
条款145.根据条款116所述的系统,其中,所述第一机器人臂和所述第二机器人臂中的每一个包括与多个致动器能够操作地耦合的多个接头,其中,所述多个致动器与所述一个或更多个计算设备能够操作地耦合,以及其中,用于控制所述第一机器人臂或所述第二机器人臂的移动的指令包括用于控制所述多个致动器中的一个或更多个致动器的致动的指令。
[0430]
条款146.根据条款116所述的系统,还包括耦合到所述第一机器人臂和所述第二机器人臂的移动基座。
[0431]
条款147.根据条款146所述的系统,其中,所述移动基座包括与所述一个或更多个计算设备能够操作地耦合并且被配置为接收用于控制所述第一机器人臂或所述第二机器人臂中的一个或更多个的移动的用户指令的一个或更多个用户输入设备。
[0432]
条款148.根据条款146所述的系统,其中,所述移动基座包括被配置为执行用于控制所述第一机器人臂或所述第二机器人臂中的一个或更多个的移动的指令的所述一个或更多个计算设备。
[0433]
条款149.根据条款116所述的系统,其中,所述一个或更多个计算设备与所述处理探针或所述成像探针中的一个或更多个能够操作地耦合,以及其中,所述一个或更多个计算设备还被配置为执行用于控制下列操作中的一个或更多个的指令:用所述处理探针进行处理或用所述成像探针进行成像。
[0434]
条款150.根据条款116所述的系统,其中,所述一个或更多个计算设备还被配置为执行包括在与所述一个或更多个计算设备能够操作地耦合的显示器上显示所述目标部位的用成像探针获得的一个或更多个图像的指令。
[0435]
条款151.根据条款116所述的系统,其中,所述第一机器人臂或所述第二机器人臂包括被配置为分别磁性地耦合到所述处理探针或所述成像探针的耦合结构。
[0436]
条款152.根据条款116所述的系统,其中,所述第一机器人臂或所述第二机器人臂包括被配置为分别能够移除地耦合到所述处理探针或所述成像探针的耦合结构,快速释放机构被配置为当错误在所述第一机器人臂或所述第二机器人臂的操作中被检测到时分别将所述第一机器人臂或所述第二机器人臂从所述处理探针或所述成像探针去耦。
[0437]
条款153.根据条款116所述的系统,还包括公共臂,其中,所述第一机器人臂在第一位置处操作地耦合到所述公共臂,以及所述第二机器人臂在第二位置处操作地耦合到所述公共臂。
[0438]
条款154.根据条款153所述的系统,还包括操作地耦合到所述公共臂的移动基座。
[0439]
条款155.根据条款116所述的系统,其中,所述成像探针包括被配置为捕获所述目标组织的超声图像的超声换能器。
[0440]
条款156.根据条款155所述的系统,其中,所述超声换能器被配置为在多普勒模式中操作,使得在所述目标部位中的高血流区域是可识别的。
[0441]
条款157.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行用于在被动模式中操作所述第一机器人臂的指令,在所述被动模式中所述第一机器人臂被配置为手动地被调整以将所述处理探针定位到手动设置定位。
[0442]
条款158.根据条款157所述的系统,其中,当所述第一机器人臂在所述被动模式中时,所述处理探针被配置为在至少一个旋转轴或至少一个平移轴中的一个或更多个轴上手动地被调整。
[0443]
条款159.根据条款158所述的系统,其中,所述至少一个旋转轴包括第一旋转轴、正交于所述第一旋转轴的第二旋转轴和正交于所述第一旋转轴和第二旋转轴的第三旋转轴,以及其中,所述至少一个平移轴包括第一平移轴、正交于所述第一平移轴的第二平移轴和正交于所述第一平移轴和第二平移轴的第三平移轴。
[0444]
条款160.根据条款159所述的系统,其中,所述第一旋转轴包括俯仰轴,所述第二旋转轴包括偏航轴,所述第三旋转轴包括滚转轴,所述第一平移轴包括x轴,所述第二平移轴包括y轴,以及所述第三平移轴包括z轴。
[0445]
条款161.根据条款157所述的系统,其中,所述一个或更多个计算设备被配置为执行用于在所述第一机器人臂从手动调整释放之后维持所述处理探针的所述手动设置定位的指令。
[0446]
条款162.根据条款161所述的系统,其中,所述第一机器人臂被配置为以在旋转轴或平移轴中的一个或更多个轴上的容差维持所述手动设置定位。
[0447]
条款163.根据条款116所述的系统,其中,所述一个或更多个计算设备被配置为执行用于在被动模式中操作所述第二机器人臂的指令,在所述被动模式中所述第二机器人臂被配置为手动地被调整以将所述成像探针定位到手动设置定位。
[0448]
条款164.根据条款163所述的系统,其中,当所述第二机器人臂在所述被动模式时,所述成像探针被配置为在至少一个旋转轴或至少一个平移轴中的一个或更多个轴上手动地被调整。
[0449]
条款165.根据条款164所述的系统,其中,所述至少一个旋转轴包括第一旋转轴、正交于所述第一旋转轴的第二旋转轴和正交于所述第一旋转轴和第二旋转轴的第三旋转轴,以及其中,所述至少一个平移轴包括第一平移轴、正交于所述第一平移轴的第二平移轴和正交于所述第一平移轴和第二平移轴的第三平移轴。
[0450]
条款166.根据条款165所述的系统,其中,所述第一旋转轴包括俯仰轴,所述第二旋转轴包括偏航轴,所述第三旋转轴包括滚转轴,所述第一平移轴包括x轴,所述第二平移轴包括y轴,以及所述第三平移轴包括z轴。
[0451]
条款167.根据条款163所述的系统,其中,所述一个或更多个计算设备被配置为执行用于在所述第二机器人臂从手动调整释放之后维持所述成像探针的所述手动设置定位的指令。
[0452]
条款168.根据条款167所述的系统,其中,所述第二机器人臂被配置为以在旋转轴或平移轴中的一个或更多个轴上的容差容差中的一个或更多个维持所述手动设置定位。
[0453]
条款169.一种用于处理患者的系统,所述系统包括:探针;耦合结构,其接收所述
探针;支撑件,其接收所述患者;臂,其耦合到所述支撑件;第一滑块,其耦合到所述臂以在第一方向上平移;第二滑块,其耦合到所述第一滑块、所述臂和所述支撑件以在横向于所述第一方向的第二方向上平移;以及可调整延伸部,其在所述第二滑块和所述耦合结构之间,所述可调整延伸部包括被配置成在横向于所述第一方向和所述第二方向的第三方向上延伸和缩回的延伸部接头;其中,所述耦合结构用所述臂、所述第一滑块、所述第二滑块和所述延伸部支撑,以允许所述耦合结构在三维体积内移动。
[0454]
条款170.根据条款169所述的系统,还包括在所述耦合结构和所述延伸部接头之间耦合到所述臂和所述耦合结构的枢轴,所述枢轴被配置为相对于所述患者向上和向下旋转所述耦合结构,以及可选地,其中,旋转枢轴线在基本上水平的方向上延伸,以及可选地,其中,基本上水平包括在相对于水平的大约10度范围内的角度。
[0455]
条款171.根据条款170所述的系统,还包括在所述耦合结构和所述延伸部接头之间耦合到所述臂和所述耦合结构的转动架,所述转动架被配置成允许所述耦合结构围绕旋转轴的旋转,以及可选地,其中,所述转动架的旋转轴在相对于竖直的大约10度范围内,以及可选地,其中,所述转动架在所述耦合结构和所述枢轴之间耦合到所述耦合结构和所述臂。
[0456]
条款172.根据条款171所述的系统,其中,所述第一滑块、所述第二滑块、所述延伸部接头、所述转动架和所述枢轴中的每一个包括制动器以当所述探针插入所述患者体内并用耦合结构耦合到所述臂时锁定所述第一滑块、所述第二滑块、所述延伸部接头、所述转动架和所述枢轴的定位,以维持所述探针的定位和定向。
[0457]
条款173.根据条款171所述的系统,还包括耦合到所述第一滑块、所述第二滑块、所述延伸部接头、所述转动架或所述枢轴中的一个或更多个的处理器控制的致动器,以在所述探针插入所述患者体内时将耦合结构朝着所述探针的耦合结构移动。
[0458]
条款174.根据条款173所述的系统,还包括耦合到处理器的联接装置以控制所述耦合结构的定位或定向中的一个或更多个,以及其中,所述联接装置包括耦合到相对应的致动器的所述第一滑块、所述第二滑块、所述延伸部接头、所述转动架和所述枢轴中的一个或更多个。
[0459]
条款175.根据条款171所述的系统,还包括耦合到第二探针的第二耦合结构,以及可选地,其中,所述第二耦合结构被配置为在所述探针上方支撑所述第二探针。
[0460]
条款176.根据条款171所述的系统,还包括耦合到第二探针的第二耦合结构,所述第二耦合结构耦合到第二延伸部接头、第二转动架和第二枢轴,所述第二耦合结构、所述第二延伸部接头、所述第二转动架和所述第二枢轴用所述臂支撑以支撑所述第二探针。
[0461]
条款177.根据条款169所述的系统,其中,所述第一方向垂直于所述第二方向。
[0462]
条款178.根据前述条款中的任一项所述的系统,其中,所述探针的耦合结构包括在所述探针的下表面上的突出部或凹槽中的一个或更多个,以及用所述臂支撑的所述耦合结构包括在所述耦合表面的上表面上的突出部或凹槽中的一个或更多个以将所述探针的所述耦合结构耦合到用所述臂支撑的所述耦合结构。
[0463]
条款179.一种用于耦合到患者支撑件的安装组件,包括:第一夹具,其固定到在所述患者支撑件的第一侧上的第一轨道;第一臂,其具有第一端和第二端,所述第一端枢转地连接到所述第一夹具;第二夹具,其固定到在所述患者支撑件的第二侧上的第二轨道;以及
第二臂,其具有第一端和第二端,所述第一端枢转地连接到所述第二夹具;其中,细长支撑件在所述第一臂和所述第二臂之间延伸以支撑待插入所述患者体内的探针。
[0464]
条款180.根据条款179所述的安装组件,其中,所述第一臂和所述第二臂各自枢转地连接到所述细长支撑件以适应在所述第一轨道和所述第二轨道之间的距离的变化。
[0465]
条款181.根据条款180所述的安装组件,其中,所述第一轨道基本上平行于所述第二轨道,以及所述第一臂和所述第二臂分别枢转地连接到所述第一夹具和所述第二夹具以允许所述第一夹具和所述第二夹具在基本上平行的配置中接合所述第一轨道和所述第二轨道。
[0466]
条款182.根据条款179所述的安装组件,还包括:第一耦合器,所述第一耦合器枢转地连接到所述第一夹具和第一臂,所述第一耦合器被配置成能够释放地耦合到所述第一臂的第一端;以及第二耦合器,所述第二耦合器枢转地连接所述第二夹具和第二臂,所述第二耦合器被配置成能够释放地耦合到所述第二臂的第一端。
[0467]
条款183.根据条款182所述的安装组件,其中,所述第一耦合器和所述第二耦合器各自具有接收所述臂的第一端的纵轴和横向于所述纵轴的枢转轴。
[0468]
条款184.根据条款183所述的安装组件,其中,所述第一耦合器限定被配置成接纳所述第一臂的第一端的第一中空腔,以及其中,所述第二耦合器限定被配置成接纳所述第二臂的第一端的第二中空腔。
[0469]
条款185.根据条款179所述的安装组件,其中,所述第一夹具和所述第二夹具各自包括第一夹爪和第二夹爪,所述第一夹爪和所述第二夹爪被配置为在所述第一夹爪和所述第二夹爪之间相对移动以牢固地连接到所述轨道。
[0470]
条款186.根据条款185所述的安装组件,其中,所述第一夹爪可利用杠杆朝着所述第二夹爪移动。
[0471]
条款187.根据条款179所述的安装组件,其中,所述第一轨道和所述第二轨道包括所述患者支撑件的一个或更多个轨道的部分,以及可选地,其中,所述患者支撑件包括床。
[0472]
条款188.根据条款179所述的安装组件,其中,所述第一臂被配置为相对于所述第一夹具枢转,以及所述第二臂被配置为相对于所述第二夹具枢转,以适应在所述患者支撑件的第一侧上的所述第一轨道和在所述患者支撑件的第二侧上的所述第二轨道之间的可变间距。
[0473]
条款189.根据条款179所述的安装组件,其中,安装组件被配置为响应于对所述细长支撑件的150kg负荷而将所述细长支撑件相对于所述第一轨道和所述第二轨道的移动限制到不大于5mm,以及可选地,其中,响应于对所述细长支撑件的100kg负荷,所述移动不大于3mm。
[0474]
条款190.根据条款179所述的安装组件,其中,所述细长支撑件、所述第一夹具、所述第一臂、所述第二夹具和第二臂被配置以便响应于对所述细长支撑件的150kg负荷而将所述细长支撑件的移动限制到不大于5mm,以及可选地,其中,响应于对所述细长支撑件的100kg负荷,所述移动不大于3mm。
[0475]
条款191.根据条款190所述的安装组件,其中,待插入所述患者体内的所述探针包括在从大约20cm到大约60cm的范围内的距离,以及其中,所述安装组件被配置成响应于对所述细长支撑件的所述负荷而将所述探针的远侧端移动不大于6mm。
[0476]
条款192.根据条款179所述的安装组件,还包括附接到所述细长支撑件的机器人臂。
[0477]
条款193.根据条款192所述的安装组件,其中,所述探针连接到所述机器人臂。
[0478]
条款194.根据条款193所述的安装组件,其中,所述探针包括处理探针或成像探针中的一个或更多个。
[0479]
条款195.根据条款194所述的安装组件,其中,所述机器人臂包括附接到所述细长支撑件的第一机器人臂和第二机器人臂。
[0480]
条款196.根据条款195所述的安装组件,其中,所述处理探针耦合到所述第一机器人臂,以及所述成像探针耦合到所述第二机器人臂。
[0481]
条款197.根据条款196所述的安装组件,其中,所述处理探针和所述成像探针彼此对准以基本上共面。
[0482]
条款198.根据条款179所述的安装组件,还包括连接到所述细长支撑件、所述第一臂、所述第二臂、所述第一夹具或所述第二夹具中的一个或更多个并从所述细长支撑件、所述第一臂、所述第二臂、所述第一夹具或所述第二夹具中的一个或更多个向下延伸以接合地板表面的一个或更多个可延伸腿。
[0483]
条款199.根据条款179所述的安装组件,还包括连接到所述细长支撑件并从所述细长支撑件向下延伸以接合地板表面的可延伸腿。
[0484]
条款200.根据条款179所述的安装组件,还包括连接到所述第一夹具并从所述第一夹具向下延伸以接合地板表面的第一可延伸腿以及连接到所述第二夹具并从所述第二夹具向下延伸以接合地板表面的第二可延伸腿。
[0485]
条款201.根据条款179所述的安装组件,还包括接合所述第一轨道的第三夹具和接合所述第二轨道的第四夹具,所述第一夹具用在所述第一夹具和所述第三夹具之间延伸的第一支架耦合到所述第三夹具以沿着所述第一轨道分布第一负荷,所述第二夹具用在所述第二夹具和所述第四夹具之间延伸的第二支架耦合到所述第四夹具以沿着所述第二轨道分布第一负荷。
[0486]
条款202.根据条款179所述的安装组件,其中,所述细长支撑件包括在所述第一臂和所述第二臂之间延伸的横梁。
[0487]
条款203.一种用于处理在患者的目标部位处的目标组织的系统,所述系统包括:根据条款179至198中的任一项所述的安装组件;第一机器人臂,所述第一机器人臂耦合到所述细长支撑件;处理探针,所述处理探针耦合到所述第一机器人臂;第二机器人臂,所述第二机器人臂耦合到所述细长支撑件;以及成像探针,所述成像探针耦合到所述第二机器人臂。
[0488]
条款204.根据条款203所述的系统,其中,所述处理探针耦合到联接装置,所述联接装置被配置为在所述第一机器人臂的端部保持静止时沿着细长轴平移所述处理探针并围绕所述细长轴旋转所述处理探针,以及其中,所述成像探针耦合到联接装置以在所述第二机器人臂的端部保持静止时沿着所述成像探针的细长轴平移所述成像探针。
[0489]
条款205.根据条款203所述的系统,其中,所述第一机器人臂包括平移和旋转所述处理探针的第一多个接头,以及其中,所述第二机器人臂包括平移和旋转所述处理探针的第二多个接头。
[0490]
条款206.根据条款203所述的系统,其中,所述机器人臂中的每个机器人臂包括从5到7个自由度。
[0491]
条款207.一种处理患者的系统,包括:机器人臂;探针,其耦合到所述机器人臂,所述探针的尺寸和形状适合插入所述患者体内;多个传感器,其耦合到所述机器人臂以在所述探针从所述机器人臂去耦的情况下指示所述探针相对于所述机器人臂的相对定位和定向;以及处理器,其操作地耦合到所述机器人臂和所述多个传感器,所述处理器被配置有将所述机器人臂移动到接合定位和定向以将所述探针与所述机器人臂接合的指令。
[0492]
条款208.根据条款207所述的系统,其中,所述处理器被配置有用所述机器人臂寻找所述探针并用所述机器人臂接合所述探针的指令。
[0493]
条款209.根据条款208所述的系统,其中,所述处理器被配置有当在所述探针插入所述患者体内的情况下用户稳定地保持所述探针时用所述机器人臂寻找所述探针的指令,以及可选地,其中,在寻找所述探针之前间隙在所述探针和所述机器人臂之间延伸,以及其中,所述机器人臂的远侧端部分接触所述探针以接合所述探针。
[0494]
条款210.根据条款207所述的系统,其中,所述机器人臂包括接合结构以接合所述探针,以及所述探针包括接合结构来利用所述接合定位和定向接合所述机器人臂。
[0495]
条款211.根据条款210所述的系统,其中,所述处理器被配置有在接触所述探针之前将所述机器人臂移动到对应于所述接合定向的定向上并且在所述接合定向上将所述机器人臂平移到所述探针上的指令。
[0496]
条款212.根据条款207所述的系统,其中,所述多个传感器包括用于使所述机器人臂在远距离处感测所述探针的粗略传感器和接近度传感器,以及可选地,其中,所述多个传感器位于所述机器人臂上。
[0497]
条款213.根据条款212所述的系统,其中,所述粗略传感器包括红外发射器和信标。
[0498]
条款214.根据条款212所述的系统,其中,所述粗略传感器包括红外发射器和信标。
[0499]
条款215.根据条款207所述的系统,其中,所述多个传感器包括传感器阵列,所述传感器阵列耦合到所述机器人臂和在所述探针上的一个或更多个基准点,以确定所述探针相对于所述机器人臂的定位和定向。
[0500]
条款216.根据条款207所述的系统,其中,当所述探针接合所述机器人臂时,所述多个传感器朝着所述探针被定向。
[0501]
条款217.一种处理患者的系统,包括:机器人臂;探针,其耦合到所述机器人臂,所述探针的尺寸和形状适于插入所述患者体内;多个传感器,其在耦合机器人臂的接合结构和所述探针的远侧端之间耦合到所述探针;以及处理器,其操作地耦合到所述机器人臂和所述多个传感器,所述处理器被配置有响应于从所述多个传感器检测到的用户输入而移动所述机器人臂的指令。
[0502]
条款218.根据条款217所述的系统,其中,所述处理器被配置有在将所述探针插入所述患者体内之前在独立式配置中用在所述机器人臂上的所述探针建立零重力模式的指令,以及其中,所述零重力模式被配置为在所述探针耦合在所述臂上的情况下用力驱动所述机器人臂的接头以基本上抵消所述机器人臂的重量。
[0503]
条款219.根据条款217所述的系统,其中,所述用户输入包括用所述多个传感器检测的应变,以及其中,所述应变包括与在所述远侧端和所述接合结构之间的所述探针的偏转相关的应变。
[0504]
条款220.根据条款217所述的系统,其中,所述探针包括尺寸和形状适于插入所述患者体内的细长探针。
[0505]
条款221.根据条款220所述的系统,其中,所述探针包括细长部分以用于所述用户在所述多个传感器和所述探针的所述远侧端之间抓握,以及其中,组织对所述探针的插入的阻力与来自所述用户的手的插入力相反地推动,以便减少对所述多个传感器的输入并减少所述探针到所述患者体内的推进。
[0506]
条款222.根据条款221所述的系统,其中,所述组织对插入的所述阻力随着所述探针的减少的推进而被所述用户感知。
[0507]
条款223.根据条款217所述的系统,其中,所述多个传感器和所述探针被布置成当所述探针遇到对移动的阻力时向所述用户提供触觉反馈。
[0508]
条款224.根据条款217所述的系统,其中,所述机器人臂包括多个接头和多个内部接头传感器,以及其中,所述处理器被配置为实现所述探针的被动模式以允许所述用户将所述探针插入所述患者体内,以及其中,所述处理器被配置为向所述多个内部接头提供反作用力以在所述被动模式中使所述臂稳定。
[0509]
条款225.根据条款217所述的系统,其中,所述探针或所述机器人臂的远侧部分中的一个或更多个包括惯性测量单元(“imu”)以检测所述探针的移动,以及可选地,其中,所述处理器被配置为接收来自所述imu的输出以确定所述探针的定位和定向。
[0510]
条款226.根据条款225所述的系统,其中,所述探针被配置为以相对于所述imu的预定定位和定向安装在所述臂上,以便响应于所述imu的定位和定向而确定所述探针的定位和定向,以及可选地,其中,所述imu以相对于所述臂的远侧端的预定定位和定向耦合到所述臂。
[0511]
条款227.根据条款225所述的系统,其中,所述处理器被配置为接收来自所述imu的输出和来自所述多个传感器的输出以确定移动所述探针的定位或定向中的一个或更多个。
[0512]
条款228.根据条款225所述的系统,其中,所述探针被配置为供所述用户抓握所述探针,以及所述传感器和所述处理器被配置为响应于所述用户抓握所述探针而确定所述用户输入。
[0513]
条款229.一种处理患者的系统,所述系统包括:护套,其尺寸和形状适合插入所述患者体内,所述护套包括细长轴;臂,其耦合到所述护套;处理探针,其包括能量源,所述处理探针包括细长轴,所述处理探针的尺寸和形状适合插入所述护套的腔内;以及机器人臂,其耦合到所述处理探针,其中,所述机器人臂被配置成使所述处理探针的细长轴与所述护套的细长轴对准并将所述处理探针推进到所述护套内。
[0514]
条款230.根据条款229所述的系统,其中,耦合到所述处理探针的所述机器人臂被配置成在将所述处理探针推进到所述护套内之前使所述处理探针的轴与所述护套的轴对准。
[0515]
条款231.根据条款229所述的系统,其中,所述机器人臂包括用于确定所述处理探
针的定向的传感器,以及可选地,其中,所述传感器包括加速度计、陀螺仪或惯性测量单元中的一个或更多个。
[0516]
条款232.根据条款229所述的系统,其中,耦合到护套的所述臂包括用于确定所述护套的定向的传感器,以及可选地,其中,所述传感器包括加速度计、陀螺仪或惯性测量单元中的一个或更多个。
[0517]
条款233.根据条款229所述的系统,其中,耦合到所述护套的所述臂包括机器人臂。
[0518]
条款234.根据条款229所述的系统,其中,所述护套包括接收所述处理探针的近侧开口和远侧开口,以及其中,所述处理探针包括足以至少延伸到所述远侧开口的长度。
[0519]
条款235.根据条款234所述的系统,其中,所述处理探针的尺寸被设计成当所述处理探针被推进到所述护套内时,所述能量源至少延伸到所述远侧开口。
[0520]
条款236.根据条款235所述的系统,其中,在所述机器人臂的端部部分和所述护套之间有间隙的情况下,所述能量源至少延伸到所述远侧开口。
[0521]
条款237.根据条款229所述的系统,其中,所述护套包括刚性护套。
[0522]
条款238.根据条款229所述的系统,其中,所述护套包括耦合到一个或更多个开口的冲洗腔,以通过所述一个或更多个开口提供冲洗流体。
[0523]
条款239.根据条款229所述的系统,其中,所述护套包括延伸到所述腔中的开口的抽吸通道以从所述腔抽吸切除的组织。
[0524]
条款240.根据条款229所述的系统,其中,所述护套的所述腔尺寸适合接收所述处理探针、内窥镜相机以及抽吸腔和冲洗腔。
[0525]
条款241.根据条款240所述的系统,其中,所述抽吸腔延伸至开口以抽吸组织切除产物。
[0526]
条款242.根据条款240所述的系统,其中,所述冲洗腔延伸至开口以冲洗处理部位。
[0527]
条款243.根据条款240所述的系统,其中,所述抽吸腔和所述冲洗腔包括双腔管的腔。
[0528]
条款244.根据条款229所述的系统,其中,所述处理探针包括刚性部分以推进到所述护套内。
[0529]
条款245.根据条款229所述的系统,其中,所述处理探针包括柔性部分以推进到所述护套内。
[0530]
条款246.根据条款229所述的系统,其中,所述处理探针被配置成旋转和平移所述能量源。
[0531]
条款247.根据条款246所述的系统,其中,所述能量源包括激光束、水射流、电极或超声换能器中的一个或更多个。
[0532]
条款248.根据条款246所述的系统,其中,所述机器人臂被配置成旋转所述能量源。
[0533]
条款249.根据条款246所述的系统,其中,所述处理探针耦合到放置在所述机器人臂上的联接装置以旋转所述处理探针。
[0534]
条款250.根据条款249所述的系统,其中,所述联接装置被配置为平移所述处理探
针。
[0535]
条款251.根据条款240所述的系统,其中,所述内窥镜相机包括被配置为在推进到所述护套内时观察所述处理探针的透镜和传感器阵列。
[0536]
条款252.根据条款251所述的系统,其中,所述内窥镜相机耦合到用于推进和缩回所述内窥镜相机的联接装置。
[0537]
条款253.根据条款252所述的系统,其中,所述联接装置耦合到所述机器人臂。
[0538]
条款254.根据条款252所述的系统,其中,所述内窥镜相机包括被配置为以足够的柱强度耦合到所述联接装置以在腔内推进和缩回所述内窥镜相机的柔性延伸部。
[0539]
条款255.根据条款252所述的系统,其中,所述内窥镜相机包括被配置为耦合到所述联接装置的刚性延伸部。
[0540]
条款256.根据条款229所述的系统,还包括耦合到超声探针的臂。
[0541]
条款257.根据条款256所述的系统,其中,耦合到所述超声探针的所述臂包括机器人臂。
[0542]
条款258.根据条款257所述的系统,其中,耦合到所述超声探针的所述机器人臂被配置为定位所述超声探针的视野以对所述处理探针成像。
[0543]
条款259.根据条款258所述的系统,其中,耦合到所述超声探针的所述机器人臂被配置成响应于所述处理探针的定位而移动所述超声探针。
[0544]
条款260.根据条款256所述的系统,其中,所述超声探针包括经直肠超声(trus)探针。
[0545]
条款261.根据条款256所述的系统,其中,所述超声探针包括联接装置以平移和旋转所述超声探针从而将所述处理探针定位在所述超声探针的视野内。
[0546]
条款262.根据条款229所述的系统,还包括被配置为耦合到所述机器人臂的端部部分的耦合组件,所述耦合组件被配置为将所述处理探针耦合到所述机器人臂。
[0547]
条款263.根据条款262所述的系统,其中,所述耦合组件被配置为以相对于所述机器人臂的端部部分的定向耦合到所述机器人臂的端部部分,以便建立所述处理探针相对于所述机器人臂的端部部分的定向,以及可选地,其中,所述耦合组件相对于所述端部部分的定向包括预定定向。
[0548]
条款264.根据条款263所述的系统,其中,所述耦合组件包括耦合到所述机器人臂的端部的接合结构,以及其中,所述机器人臂包括相对应的接合结构。
[0549]
条款265.根据条款262所述的系统,其中,所述耦合组件被配置成在所述机器人臂的端部部分保持静止时旋转所述处理探针。
[0550]
条款266.根据条款265所述的系统,其中,所述耦合组件被配置成在所述机器人臂的端部部分保持静止时平移所述处理探针。
[0551]
条款267.根据条款266所述的系统,其中,耦合组件被配置成在所述机器人组件的端部部分保持静止时平移内窥镜相机。
[0552]
条款268.根据条款266所述的系统,其中,耦合组件被配置成在所述机器人组件的端部部分保持静止时平移冲洗腔的远侧开口。
[0553]
条款269.根据条款266所述的系统,其中,耦合组件被配置成在所述机器人组件的端部部分保持静止时平移抽吸腔的远侧开口。
[0554]
条款270.根据条款262所述的系统,其中,所述耦合组件被配置成使所述处理探针、内窥镜相机、冲洗腔和抽吸腔一起平移。
[0555]
条款271.根据条款262所述的系统,其中,所述耦合组件被配置成使所述处理探针、内窥镜相机、冲洗腔和抽吸腔独立地平移。
[0556]
条款272.根据条款229所述的系统,还包括耦合到所述机器人臂的处理器。
[0557]
条款273.根据条款272所述的系统,其中,所述处理器被配置有将所述处理探针推进到所述护套内的指令。
[0558]
条款274.根据条款272所述的系统,其中,所述处理器被配置成使所述处理探针的细长轴与所述护套的细长轴对准。
[0559]
条款275.根据条款274所述的系统,其中,所述处理器被配置有接收指示所述处理探针的细长轴与所述护套的细长轴已经对准的输入并响应于所述输入而沿着所述护套的细长轴推进所述处理探针的指令。
[0560]
条款276.根据条款272所述的系统,其中,所述处理器被配置为确定所述刚性护套的定向,以及其中,所述处理器被配置有以所述护套的定向将所述处理探针定向的指令。
[0561]
条款277.根据条款276所述的系统,其中,耦合到所述护套的所述臂包括用于确定所述护套的定向的传感器。
[0562]
条款278.根据条款276所述的系统,其中,所述处理器被配置为从耦合到所述护套的所述臂的接头状态确定所述护套的定向。
[0563]
条款279.根据条款276所述的系统,其中,所述机器人臂包括用于确定所述处理探针的定向的传感器。
[0564]
条款280.一种被配置到所述机器人臂的端部部分的耦合组件,所述耦合组件包括:结构,其接收处理探针;以及接合结构,其耦合到机器人臂的端部部分以建立所述处理探针相对于所述机器人臂的端部部分的定向。
[0565]
条款281.根据条款280所述的耦合组件,其中,所述耦合组件相对于所述端部部分的定向包括预定定向,以建立所述探针相对于所述机器人臂的端部部分的预定定向。
[0566]
条款282.根据条款280所述的耦合组件,其中,所述机器人臂包括相对应的接合结构。
[0567]
条款283.根据条款280所述的耦合组件,其中,所述耦合组件被配置成在所述机器人臂的端部部分保持静止时旋转所述处理探针。
[0568]
条款284.根据条款283所述的耦合组件,其中,所述耦合组件被配置成在所述机器人臂的端部部分保持静止时平移所述处理探针。
[0569]
条款285.根据条款280所述的耦合组件,其中,耦合组件被配置成在所述机器人组件的端部部分保持静止时平移内窥镜相机。
[0570]
条款286.根据条款280所述的耦合组件,其中,耦合组件被配置成在所述机器人组件的端部部分保持静止时平移冲洗腔的远侧开口。
[0571]
条款287.根据条款280所述的耦合组件,其中,耦合组件被配置成在所述机器人组件的端部部分保持静止时平移抽吸腔的远侧开口。
[0572]
条款288.根据条款280所述的耦合组件,其中,所述耦合组件被配置成在所述机器人臂的端部部分保持静止时使所述处理探针、内窥镜相机、冲洗腔和抽吸腔一起平移。
[0573]
条款289.根据条款280所述的耦合组件,其中,所述耦合组件被配置成在所述机器人臂的端部部分保持静止时使所述处理探针、内窥镜相机、冲洗腔和抽吸腔独立地平移。
[0574]
条款290.根据条款280所述的耦合组件,其中,所述耦合组件包括一个或更多个联接装置以在所述机器人臂的端部部分保持静止时使所述处理探针、内窥镜相机、冲洗腔或抽吸腔一起移动。
[0575]
条款291.一种处理患者的方法,所述方法包括:使处理探针的细长轴与护套的细长轴对准;接收指示所述处理探针的细长轴与所述护套的细长轴已经对准的输入;以及响应于所述输入,沿着所述护套的细长轴推进所述处理探针。
[0576]
条款292.根据前述条款中的任一项中所述的系统或方法,其中所述被动模式包括零重力模式。
[0577]
条款293.根据前述条款中的任一项中所述的系统或方法,还包括耦合到夹具的传感器,所述夹具被配置为耦合到轨道,所述传感器被配置成测量耦合到机器人臂的所述夹具、所述轨道或支撑件中的一个或更多个的负荷。
[0578]
虽然在本文示出和描述了本发明的优选实施例,但对于本领域中的技术人员将明显的是,这样的实施例仅作为例子被提供。本领域中的技术人员现在在不偏离本发明的情况下将想到许多变化、改变和替换。应当理解的是,在实践本发明时可以采用本文描述的本发明的实施例的各种可选方案。随附的权利要求被认为是限定本发明的范围,以及从而涵盖了在这些权利要求及其等同物的范围内的方法和结构。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1