测定装置以及测定方法与流程
1.本发明涉及测定装置以及测定方法。
背景技术:
2.化妆品的重要的要素之一为感性价值。化妆品的感性价值是指,在使用了化妆品时,基于影响使用者的感性的价值。例如,若通过使用化妆品,肌肤的触感变好,使用者能够获得满足感,则认为化妆品的感性价值较高。
3.为了能够对化妆品附加感性价值,需要实现基于感性工学的“良好触感”。因此,需要对基于使用者(年龄/习惯)、周边环境(时期/场所)的不同的肌肤的表面状态进行正确测定。
4.以往,肌肤的状态的测定通过触诊进行。另外,公知有对触感进行定量评价的装置(专利文献1)。
5.现有技术文献
6.专利文献
7.专利文献1:日本特开2016
‑
038317号公报
技术实现要素:
8.本发明要解决的问题
9.但是,由于基于触诊的测定为主观的判断,因此不能稳定地对肌肤的表面状态进行测量。现有技术的触觉评价装置其装置自身较大,难以简便地对人的肌肤进行测定。
10.鉴于上述情况,本发明的一个实施方式的目的在于,提供一种对与触感相关联的肌肤的表面状态进行稳定测定的测定装置。
11.用于解决问题的手段
12.本发明的测定装置包括:触头,其用于与测定对象接触;传感器,其设置于上述触头,用于对上述测定对象的至少表面状态进行测定;驱动部,其用于使上述触头和上述传感器相对于上述测定对象位移;以及振动隔离部件,其设于上述驱动部与上述触头和上述传感器之间,用于隔离自上述驱动部向上述触头和上述传感器的振动,该测定装置基于上述传感器的测定值对表面状态进行测定。
13.发明的效果
14.能够提供一种对与触感相关联的肌肤的表面状态进行稳定测定的测定装置。
附图说明
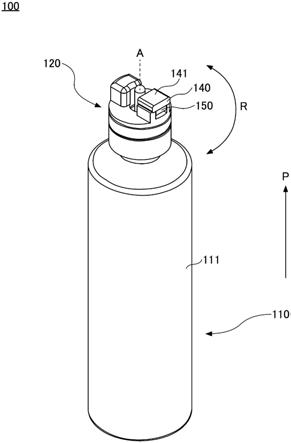
15.图1是第一个实施方式的测定装置的一个例子的整体构成图。
16.图2是第一个实施方式的测定装置的一个例子的检测部的侧视图。
17.图3是第一个实施方式的测定装置的一个例子的检测部的立体图。
18.图4是用于说明第一个实施方式的测定装置的一个例子的顶端部的构造的图。
19.图5a是用于说明第一个实施方式的测定装置的一个例子的上部支承部件的图。
20.图5b是用于说明第一个实施方式的测定装置的一个例子的上部支承部件的图。
21.图5c是用于说明第一个实施方式的测定装置的一个例子的上部支承部件的图。
22.图5d是用于说明第一个实施方式的测定装置的一个例子的上部支承部件的图。
23.图6a是对第一个实施方式的测定装置的一个例子的测定结果进行说明的图。
24.图6b是对第一个实施方式的测定装置的一个例子的测定结果进行说明的图。
25.图6c是对第一个实施方式的测定装置的一个例子的测定结果进行说明的图。
26.图7a是对第一个实施方式的测定装置的一个例子的使用例进行说明的图。
27.图7b是对第一个实施方式的测定装置的一个例子的使用例进行说明的图。
28.图7c是对第一个实施方式的测定装置的一个例子的使用例进行说明的图。
29.图7d是对第一个实施方式的测定装置的一个例子的使用例进行说明的图。
30.图8a是对第一个实施方式的测定装置的一个例子的使用例进行说明的图。
31.图8b是对第一个实施方式的测定装置的一个例子的使用例进行说明的图。
32.图8c是对第一个实施方式的测定装置的一个例子的使用例进行说明的图。
33.图9a是对第一个实施方式的测定装置的一个例子的使用例进行说明的图。
34.图9b是对第一个实施方式的测定装置的一个例子的使用例进行说明的图。
35.图9c是对第一个实施方式的测定装置的一个例子的使用例进行说明的图。
36.图10是对第一个实施方式的顶头部的重量进行说明的图。
37.图11是第二实施方式的测定装置的一个例子的整体构成图。
38.图12是第二实施方式的测定装置的一个例子的检测部的主视图。
39.图13是第二实施方式的测定装置的一个例子的检测部的侧视图。
40.图14是第二实施方式的测定装置的一个例子的检测部的立体图。
41.图15是第二实施方式的测定装置的一个例子的检测部的剖视图。
42.图16是第二实施方式的测定装置的变形例的检测部的剖视图。
43.图17是第三实施方式的测定装置的一个例子的整体构成图。
44.图18是第三实施方式的测定装置的一个例子的检测部的立体图。
45.图19是第三实施方式的测定装置的一个例子的检测部的剖视图。
46.图20是第四实施方式的测定装置的一个例子的检测部的立体图。
47.图21是第四实施方式的测定装置的一个例子的检测部的内部构成图。
48.图22是第五实施方式的测定装置的一个例子的检测部的立体图。
49.图23是第五实施方式的测定装置的一个例子的检测部的内部构成图。
50.图24是第六实施方式的测定装置的一个例子的检测部的立体图。
51.图25是示出第七实施方式的测定装置的一个例子的运算结果的图。
52.图26是示出第七实施方式的测定装置的一个例子的运算结果的图。
53.图27是示出第七实施方式的测定装置的一个例子的运算结果的图。
54.图28是示出第七实施方式的测定装置的一个例子的运算结果的图。
55.图29是示出第七实施方式的测定装置的一个例子的运算结果的图。
56.图30是示出第七实施方式的测定装置的一个例子的运算结果的图。
57.图31是示出第七实施方式的测定装置的一个例子的运算结果的图。
58.图32是示出第七实施方式的测定装置的一个例子的运算结果的图。
59.图33是示出第七实施方式的测定装置的一个例子的运算结果的图。
60.图34是示出第七实施方式的测定装置的一个例子的运算结果的图。
61.图35是示出第八实施方式的测定装置的一个例子的运算结果的图。
62.图36是示出第八实施方式的测定装置的一个例子的运算结果的图。
具体实施方式
63.以下,参照附图对用于实施本发明的方式进行说明。需要说明的是,在本说明书以及附图中,对于实质上具有相同构成的构成元件,付与相同的附图标记,并且省略重复的说明。
64.<<第一个实施方式>>
65.<测定装置1>
66.对第一个实施方式进行说明。图1是本实施方式的测定装置的一个例子的整体构成图。
67.本实施方式的测定装置1包括检测部100、控制装置200。检测部100和控制装置200通过电缆等连接。如以下详细说明那样,本实施方式的测定装置1对与触感相关联的肌肤的表面状态、例如、肌肤的表面是否为光滑的状态等进行测定。
68.<检测部100>
69.首先,对检测部100进行说明。
70.图2是本实施方式的测定装置的一个例子的检测部100的侧视图。图3是本实施方式的测定装置的一个例子的检测部100的立体图。
71.本实施方式的测定装置1的检测部100包括主体部110、顶端部120。检测部100通过在箭头p的方向将顶端部120按压于测定对象、例如人的手腕、脸颊等的肌肤,从而对肌肤的表面状态进行测定。顶端部120以旋转轴线a为中心在箭头r的方向旋转。
72.主体部110包括大致圆筒形的壳体111。主体部110在壳体111的内部包括用于使顶端部120旋转的驱动部170。即,主体部110包括用于内置驱动部170的壳体111。壳体111为测定者能够把持的大小的形状。测定者通过把持主体部110来进行测定。测定者通过把持主体部110并使其朝向测定对象移动,从而将顶端部120按压于测定对象。需要说明的是,可以将主体部110安装于例如机器人臂等来进行测定。
73.主体部110和顶端部120通过在驱动部170作用下进行旋转的连结轴130被连结。如此,主体部110和顶端部120通过连结轴130被连接。需要说明的是,连结轴130是连结部件的一个例子。
74.顶端部120包括触头140、传感器150。
75.触头140是测定装置1的用于与测定对象接触的部件。触头140的接触面141与测定对象接触。触头140的接触面141根据测定对象、测定的目的不同,可以为平面,也可以在表面存在凹凸。
76.测定对象与触头140接触,顶端部120在箭头r的方向产生旋转,从而产生振动。例如,在测定对象的表面粗糙度较大的情况下,振动变大。另外,在测定对象的表面粗糙度较小的情况下,振动变小。触头140的材质为不锈钢、铜、黄铜等的金属。通过将触头140的材质
设定为金属,能够将产生的较宽的频带、特别是高频带的振动传递至传感器150。需要说明的是,能够将触头140的材质设定为橡胶等的弹性体。通过将触头140的材质设定为弹性体,例如,能够模拟沿手指传播的振动。
77.传感器150是用于对测定对象的表面状态进行测定的传感器。本实施方式的传感器150为振动传感器。传感器150设置于触头140与接触面141相反一侧的面(背面142。参照图5c。)。作为振动传感器,例如为3轴的加速度传感器。传感器150通过顶端部120进行旋转从而触头140和测定对象接触且产生位移,对产生的振动进行检测。传感器150通过电缆等与控制装置200连接。控制装置200对来自传感器150的信号进行检测,从而取得测定值。
78.对顶端部120的构造进行说明。图4是用于说明本实施方式的测定装置的一个例子的顶端部120的构造的图。图4是将构成顶端部120的部件进行分解并在旋转轴线a方向排列的图。
79.顶端部120在驱动部170作用下进行旋转。由于驱动部170如后述那样由马达构成,从而产生振动。若该振动被振动传感器检测,则测定结果产生误差。为了防止那样的误差的产生,本实施方式的顶端部120以来自主体部110的振动、特别是在驱动部170产生的振动不传播至设于顶端部120的传感器150的方式进行隔离。
80.本实施方式的顶端部120自主体部110侧依次包括下部支承部件121、下部振动吸收部件122、中间支承部件123、上部振动吸收部件124、以及上部支承部件125。下部支承部件121、中间支承部件123、上部支承部件125例如由聚甲醛等的树脂形成。下部振动吸收部件122、上部振动吸收部件124由吸收振动的部件形成。作为用于吸收振动的部件,例如为发泡聚氨酯等的海绵体、橡胶等。通过在驱动部170与传感器150之间设置下部振动吸收部件122、上部振动吸收部件124,对振动进行吸收,从而隔离自驱动部170向触头140以及传感器150的振动。下部振动吸收部件122、上部振动吸收部件124是振动隔离部件的一个例子。
81.下部支承部件121、下部振动吸收部件122、中间支承部件123、上部振动吸收部件124、上部支承部件125的各部件分别通过粘接剂等与相邻的部件进行固定。通过这样进行固定,能够将来自连结轴130的旋转自下部支承部件121传递至上部支承部件125。
82.下部支承部件121通过与连结轴130连结,从而在主体部110的驱动部170作用下进行旋转。由此,若连结轴130在驱动部170作用下旋转,则顶端部120旋转。下部支承部件121包括棒状部件1211。棒状部件1211贯通下部振动吸收部件122、中间支承部件123、上部振动吸收部件124、以及上部支承部件125的各自的开口部1221、1231、1241、1251,棒状部件1211的顶端部在测定对象侧露出。通过该棒状部件1211与测定对象接触,能够进行将检测部100按压于测定对象时的定位。需要说明的是,下部支承部件121的棒状部件1211以不与中间支承部件123和上部支承部件125接触的方式分离设置。由此,来自主体部110的振动不传递至中间支承部件123和上部支承部件125。
83.下部振动吸收部件122设于下部支承部件121和中间支承部件123之间。下部振动吸收部件122将来自下部支承部件121的旋转传递至中间支承部件123,并且吸收自下部支承部件121传来的振动,特别是吸收来自驱动部170的振动,从而使振动不传递至中间支承部件123。
84.中间支承部件123设于下部振动吸收部件122和上部振动吸收部件124之间。中间支承部件123包括具有开口部1231的圆板状的平板即平板部1232、以及与平板部1232的下
部支承部件121侧的面结合的圆筒部1233。在中间支承部件123的圆筒部1233的内部,以与平板部1232的圆筒部1233侧的面接触的方式设置下部振动吸收部件122。中间支承部件123将来自下部振动吸收部件122的旋转传递至上部振动吸收部件124。
85.上部振动吸收部件124设于中间支承部件123和上部支承部件125之间。上部振动吸收部件124将来自中间支承部件123的旋转传递至上部支承部件125,并且吸收自中间支承部件123传来的振动、特别是在驱动部170产生的振动,从而振动不传递至上部支承部件125。需要说明的是,自主体部110观察将自振动隔离部件(下部振动吸收部件122以及上部振动吸收部件124)向顶端的部分称为顶头部。在本实施方式中,上部支承部件125、触头140以及传感器150为顶头部160。
86.上部支承部件125是用于支承触头140、传感器150的部件。图5a至图5d是用于说明本实施方式的测定装置的一个例子的上部支承部件125的图。图5a是上部支承部件125的俯视图,图5b是上部支承部件125的主视图,图5c是上部支承部件125的右侧视图,图5d是上部支承部件125的立体图。
87.上部支承部件125包括直径10mm至50mm的圆板状的底部1252。例如,本实施方式的底部1252为直径30mm的圆板。需要说明的是,对于底部1252的直径,可以根据测定对象的大小适当决定,不限于上述范围。另外,对于底部1252的俯视的形状,不限于圆,可以为多边形。底部1252在中央具有开口部1251。在底部1252的上表面设有触头支承部件1253、1254。触头支承部件1253、1254是自排列设置的底部1252的上表面垂直形成的板状的部件。触头140通过粘接剂等被固定于触头支承部件1253、1254的上部。传感器150通过粘接剂等被固定于触头140的与接触面141相对的背面142。传感器150被固定于触头支承部件1253与触头支承部件1254之间。而且,在底部1252的触头支承部件1253、1254相对于开口部1251相对的位置,形成有突出部1255。通过设置突出部1255,能够使触头140不倾斜地将其均匀地按压于测定对象。需要说明的是,上部支承部件125是支承部件的一个例子。突出部1255是接触部的一个例子。
88.在本实施方式的顶端部120中,通过包括两个振动吸收部件(下部振动吸收部件122以及上部振动吸收部件124),通过下部振动吸收部件122使来自主体部110的振动衰减,进一步,能够通过上部振动吸收部件124使振动。由此,能够使传感器150中的来自主体部110的振动的影响较小。另外,通过使用多个振动吸收部件,能够将各振动吸收部件的厚度设定为较薄,从而能够稳定进行自连结轴130向上部支承部件125的旋转的传递。而且,通过改变各振动吸收部件的吸收的频率特性,能够在较宽范围的频率区域中使振动衰减。
89.驱动部170使连结轴130旋转而使顶端部120相对于测定对象旋转位移。驱动部170例如为步进马达、dc马达等的马达。马达可以包括变速器。
90.在通过人的手使触头140和传感器150移动的情况下,测定者的动作的抖动等产生影响,从而使触头140和传感器150移动的速度产生基于人、日期以及时间的不同的偏差。在本实施方式的测定装置1中,通过使用驱动部170,能够以期望的速度使触头140和传感器150移动。例如,在跨长期间的测定(例如,1周、1个月、1年等)等中,即使日期和时间、测定者改变,也能够以规定的期望的速度使触头140和传感器150移动,从而能够提高测定的再现性。
91.<控制装置200>
92.接下来返回图1,对控制装置200进行说明。
93.控制装置200包括信号处理部210和检测部控制部220。
94.信号处理部210用于接收来自检测部100的传感器150的信号。并且,信号处理部210对接收的信号进行滤波处理、放大处理,取得模拟/数字转换的测定值。信号处理部210通过对取得的测定值进行处理,从而对肌肤的表面状态进行测量。例如,对测定值进行傅里叶变换,通过功率谱等进行测量。
95.检测部控制部220对检测部100的驱动部170进行控制。具体而言,对驱动部170进行控制,使连结轴130在规定的角度之间往复旋转。连结轴130的旋转速度可以在往复时的一部分的期间内设定为恒定速度,也可以设定为以正弦函数改变。需要说明的是,例如,在跨长期间的测定(例如,1周、1个月、1年等)、对较多的被测者的定等的情况下,通过将速度决定为某恒定的基准速度,并且以该基准速度使触头140和传感器150位移来进行测定。在本实施方式的测定装置1中,通过使用驱动部170,能够以决定的基准速度进行测定,从而测定的再现性提高,能够抑制测定的偏差等。另外,对于被测者,通过以多个速度进行测定,能够对肌肤相对于速度的特性进行测定。
96.需要说明的是,对于基于检测部控制部220的检测部100的驱动部170的控制,不限于以在上述规定的角度之间往复的方式使其旋转。例如,可以使连结轴130在一个方向以规定速度进行旋转运动。另外,此时,对于速度,可以设定为以多个速度进行。而且,对于速度,可以设定为基于规定的设定逐渐使速度改变。
97.控制装置200的各功能通过cpu(central processing unit)借助可读取地存储于未图示的存储装置中的程序进行动作来实现。例如,这些各功能通过包括cpu的微型计算机中的硬件和软件的协作来实现。
98.<检测结果>
99.图6a至图6c是对本实施方式的测定装置的一个例子的测定结果进行说明的图。
100.图6a至图6c是作为测定对象对被测者的脸颊进行测定的结果。测定是使触头140和传感器150以在约90
°
的范围内往复的方式位移而进行的。另外,使触头140和传感器150位移的旋转方向的速度以除了折返部分之外成为大致恒定的速度的方式进行测定。
101.图6a是在触头140未接触测定对象的状态、即空转状态下的传感器150的输出。图6b是在使触头140接触光滑的肌肤的被测者的肌肤的状态下进行测定的状态下的传感器150的输出。图6c是在使触头140接触粗糙的肌肤的被测者的肌肤的状态下进行测定的状态下的传感器150的输出。需要说明的是,图表的纵轴表示加速度(
×
9.8m/s2),横轴表示时间(ms)。另外,加速度是传感器150的旋转方向的加速度的输出值。
102.本实施方式的传感器150是加速度传感器。在本实施方式的检测部100中,使用传感器150的旋转方向的加速度。在测定中,对于大致铅直的脸颊,使检测部100的顶端部按压于被测者的脸颊而进行测定。因此,通过触头140、传感器150旋转,在重力加速度的影响下,测定值在1秒间反复上升或下降。通过图6a,在空转状态下,大致仅重力加速度的变动被测量。若比较图6b、图6c,可知相对于光滑的肌肤的被测者的试验结果,在粗糙的肌肤的被测者的试验结果中,高频率的振动变大。即,对于传感器150的测定值,高频率的振动越大,能够判断肌肤的表面状态越为粗糙(rough)的状态。如此,通过使用本实施方式的测定装置1,能够对肌肤的表面状态进行测定。需要说明的是,对于传感器150的输出,除了旋转方向的
加速度之外,可以使用半径方向、旋转轴线方向的加速度进行测定。
103.<作用/效果>
104.本实施方式的测定装置1能够一边通过驱动部170使触头140接触,一边使触头140和传感器150以规定的速度位移。由此,例如,即使日期和时间、测定者改变,也能够进行再现性较高的稳定的测量。
105.本实施方式的测定装置1通过包括振动吸收部件,能够阻断自主体部110的驱动部170传递至传感器150的振动。由此,在通过传感器150进行测定时,能够不受来自主体部110的驱动部170的振动的影响地进行正确的测定。
106.本实施方式的测定装置1因为小型而易于携带,能够在任何环境下进行测定。另外,本实施方式的测定装置1通过旋转运动使触头140和传感器150位移,从而能够一边使位移的距离较长,一边对测定对象(肌肤)的狭小范围进行测量。
107.本实施方式的测定装置1中,由于由金属构成触头140,因此也能够对通过触头140和测定对象接触且位移而产生的高频的振动进行测量。
108.<使用例>
109.示出使用本实施方式的测定装置1的测定方法和测定的结果。
110.(1)肌肤触感评价
111.使用本实施方式的测定装置1进行了肌肤触感的评价。具体而言,对于通过本实施方式的测定装置1的测定结果、专门评价者的基于触诊的触感评价、基于表皮角质层水分量测定装置的角质层水分量评价、以及基于视频显微镜的肌理摄影的角质层的均匀度(肌理的状态评价),进行了获得的数据间的相关分析。测定以20岁至49岁的女性40名为对象进行。
112.图7a至图7d是作为本实施方式的测定装置的一个例子的使用例,对进行肌肤触感评价的结果进行说明的图。
113.图7a以及图7b是通过本实施方式的测定装置1测定的结果和专门评价者的基于触诊的触感评价的结果的相关结果。图7a是在测定装置1中振动频率180hz的振动的频谱强度与基于触诊的触诊评价的粗糙程度的评价结果的相关结果。图7b是在测定装置1中振动频率30hz的振动的频谱强度与基于触诊的触诊评价的粘性程度的评价结果的相关结果。由该相关结果,可以确认通过本实施方式的测定装置1测定的结果与专门评价者的基于触诊的触感评价的结果之间存在非偶然的相关。如此,通过使用本实施方式的测定装置1,能够进行肌肤的触感评价。
114.图7c是在测定装置1振动频率30hz的振动的频谱强度与基于表皮角质层水分量测定装置的角质层水分量评价结果的相关结果。由该相关结果可以确认通过本实施方式的测定装置1测定的结果与基于表皮角质层水分量测定装置的角质层水分量评价结果之间存在非偶然的相关。如此,通过使用本实施方式的测定装置1,能够进行角质层水分量的评价。
115.图7d是在测定装置1中振动频率140hz的振动的频谱强度与基于视频显微镜的肌理摄影的角质层的均匀度(肌理的状态评价)的相关结果。由该相关结果可以确认通过本实施方式的测定装置1测定的结果与基于视频显微镜的肌理摄影的角质层的均匀度(肌理的状态评价)之间存在非偶然的相关。如此,通过使用本实施方式的测定装置1,能够进行肌理的状态评价。
116.(2)化妆品的使用触感评价
117.在人工皮肤(beaulax制)上涂敷专门评价者的使用感的评价不同的两种化妆水时使用测定装置1取得振动数据。作为使用感的评价,采用清爽感。样品1是清爽感较高的样品,样品2是清爽感较低的样品。需要说明的是,为了以数值评价清爽感,数名专门评价者进行将清爽感设定为
‑
3~3的7阶段的评价,并且将该评价评分的平均值作为清爽得分进行评价。在其评价结果中,样品1为清爽得分1.8,样品2为清爽得分
‑
2.33。
118.图8a至图8c是作为本实施方式的测定装置的一个例子的使用例,对进行化妆品的使用触感评价的结果进行说明的图。
119.图8a是在测定装置1中样品1的测定中的振动波形。图8b是在测定装置1中样品2的测定中的振动波形。图8c是在测定装置1中对样品1、样品2的频率频谱进行测定的结果。由该评价结果明确可知,作为通过本实施方式的测定装置1进行测定的结果,在不同的使用触感的化妆品能够取得不同的振动数据。如此,通过使用本实施方式的测定装置1,能够进行化妆品的使用触感评价。
120.(3)化妆品的使用前后的评价
121.在被测者的前手腕内侧涂敷乳霜(化妆品)前以及涂敷乳霜后,使用测定装置1取得振动数据。
122.图9a至图9c是作为本实施方式的测定装置的一个例子的使用例,对进行化妆品的使用前后的评价的结果进行说明的图。
123.图9a是在测定装置1中乳霜涂敷前的测定中的振动波形。图9b是在测定装置1中乳霜涂敷后的测定中的振动波形。图9c是在测定装置1中对乳霜涂敷前和涂敷后的频率频谱进行测定的结果。由该评价结果明确可知,作为通过本实施方式的测定装置1进行测定的结果,在乳霜涂敷前和涂敷后能够取得不同的振动数据。如此,通过使用本实施方式的测定装置1,能够进行化妆品的使用前后的评价。
124.<变形例>
125.传感器150不限于振动传感器。例如,作为传感器150,可以使用力传感器。作为力传感器,可以使用3轴的力传感器。通过作为传感器150而具有力传感器,能够对触头140位移时的肌肤与触头140的摩擦力进行测定。另外,作为传感器150,可以设定为包括振动传感器和力传感器。
126.传感器150可以设定为通过无线进行输出的无线传感器。通过将传感器150设定为无线传感器,能够使配线简略化。另外,通过将传感器150设定为无线传感器,不存在配线的缠绕,能够提高基于驱动部170的旋转的自由度(例如,在一个方向以恒定速度进行旋转运动等)。
127.测定装置1可以包括多个传感器150。例如,变形例的测定装置可以设定为在图5a、图5b以及图5d所示突出部1255的位置进一步具有传感器150。
128.控制装置200可以内置于主体部110的壳体111内。由此,使用者能够日常简单地进行测定。
129.触头140可以设定为可更换。通过将触头140设定为可更换,能够根据测定、测定对象采用最合适的触头。
130.触头140不限于本实施方式那样的板状的形状。例如,可以为刷子那样的触头。通
过采用刷子作为触头140,例如,能够对涂敷化妆品时的肌肤进行评价。需要说明的是,除了刷子之外,还可以将例如化妆棉、海绵体等的在化妆品中使用的涂敷工具用作触头。
131.对于顶端部120的构造,不限于本实施方式的构造。例如,为了进行将触头140按压于测定对象时的定位,可以在顶端部120的周围,设置与顶端部120测定对象侧端部相同高度的圆筒状的盖部。由此,通过将盖部按压于肌肤,能够进行触头140的按压方向的定位。需要说明的是,圆筒状的盖部的高度可以设定为可根据测定部位的肌肤的形状、柔软性、表面状态改变。另外,可以在主体部110和顶端部120之间具有顶端部120成为恒定角度那样的机构(摆头机构),使得触头140以恒定角度接触测定对象。
132.在顶端部120中,可以包括传感器150之外的传感器。例如,可以设定为包括温度传感器。通过包括温度传感器,能够同时对测定对象即肌肤的温度进行测定。另外,可以包括ccd摄像机等的摄像元件。通过包括摄像元件,能够同时对肌肤的肌理等进行测定。
133.顶端部120可以设定为可自主体部110取下。例如,可以将顶端部120连接于其他的检测部100的主体部110,也可以在主体部110连接其他的顶端部120。
134.对于顶端部120的位移,不限于本实施方式的旋转方向的位移。例如,通过直线往复运动,可以为直线方向的位移。
135.对于顶头部160的重量,优选为30g以下,更优选为20g以下,特别优选为15g以下。图10是示出顶头部的重量与在测定对象和顶头部之间产生的振动的衰减比的图表。试验求得将传感器150的振动传感器直接设置于载置于进行随机振动的振动台的模擬皮肤上而对振动进行测定的值与将改变重量的顶头部160的样品和振动传感器设置于该模擬皮肤而对振动进行测定的值的比(振动衰减比)。振动衰减比由振动的频率范围100~500hz中的各振动衰减比的平均值求得。需要说明的是,认为振动衰减比越接近1,则越不使振动台的振动衰减而忠实地进行测定。通过图10的结果,顶头部的重量越小,则约能够正确地对在振动台产生的振动进行测定。需要说明的是,通过图10,若为30g以下,则与直接安装传感器150的情况相比,能够对大致40%以上的振动进行测定。
136.对于测定对象,不限于人的肌肤。例如,可以用于牛、猪等的家畜的皮肤。另外,不限于人的肌肤(皮肤),可以对人工皮革、模拟皮肤、布、纸、毛发等的表面状态进行测定。
137.在本实施方式的测定装置1中,作为振动隔离部件使用了振动吸收部件。但是,振动隔离部件不限于振动吸收部件。例如,可以通过使用磁力联接器将驱动部170和传感器150接合,隔离自驱动部170向触头140以及传感器150的振动。磁力联接器在联接器之间设置空间,并且通过磁力来传递力。因此,能够在联接器之间隔离振动。
138.<<第二实施方式>>
139.<测定装置2>
140.接下来,对第二实施方式进行说明。图11是本实施方式的测定装置的一个例子的整体构成图。
141.本实施方式的测定装置2包括检测部300和控制装置400。检测部300和控制装置400通过无线或有线以可通信的方式连接。本实施方式的测定装置2与测定装置1相同,对与触感相关联的肌肤的表面状态、例如肌肤的表面是否为光滑的状态等进行测定。
142.<检测部300>
143.首先,对检测部300进行说明。
144.图12是本实施方式的测定装置的一个例子的检测部300的主视图。图13是本实施方式的测定装置的一个例子的检测部300的侧视图。图14是本实施方式的测定装置的一个例子的检测部300的立体图。
145.本实施方式的测定装置2的检测部300包括主体部310和顶端部320。顶端部320以触头340自主体部310的后述按压环316的开口部露出的方式,内置于主体部310。检测部300通过在箭头p的方向将顶端部320按压于测定对象、例如人的手腕、脸颊等的肌肤,从而对肌肤的表面状态进行测定。顶端部320以旋转轴线a为中心在箭头r1的方向旋转。需要说明的是,对于旋转方向,不限于箭头r1的方向,例如,可以在箭头r1的反方向旋转,也可以在箭头r1的方向及其反方向重复旋转。
146.主体部310包括中央部分变细的大致圆筒形的壳体311。壳体311由顶盖312、侧盖313、侧盖314、以及底盖315构成。壳体311的各盖部由丙烯腈/丁二烯/苯乙烯共聚树脂(abs(acrylonitrile butadiene styrene)树脂)等形成。
147.顶盖312的上部螺接有在顶端包括环状的平面316a的圆筒形的按压环316。在该按压环316的内侧以顶端部320的触头340在外部露出的方式包括顶端部320。
148.通过将按压环316的平面316a按压于肌肤,能够进行测定装置2的按压方向的定位。自按压环316的平面316a至触头340的后述接触面341的沿旋转轴线a的方向的距离可以通过改变螺接于顶盖312的量来进行改变。如此,例如,能够根据测定部位的肌肤的形状、柔软性、表面状态,改变自按压环316的平面316a至触头340的接触面341的沿旋转轴线a的方向的距离。由此,能够对顶端部320的触头340接触测定对象时的按压的力进行调整。需要说明的是,按压环316例如由聚甲基丙烯酸甲酯树脂(pmma(polymethyl methacrylate))等形成。
149.主体部310在壳体311的内部包括用于使顶端部320旋转的后述驱动部370。即,主体部310包括内置驱动部370的壳体311。壳体311为测定者可把持的大小的形状。测定者通过把持主体部310来进行测定。测定者通过把持主体部310而使其朝向测定对象移动,从而将顶端部320按压于测定对象。
150.触头340是用于与测定装置2的测定对象接触的部件。触头340的接触面341与测定对象接触。触头340的接触面341根据测定对象、测定的目的可以为平面,也可以在表面存在凹凸。
151.测定对象与触头340接触,并且顶端部320以旋转轴线a为中心在例如箭头r1的方向旋转,从而产生振动。例如,在测定对象的表面粗糙度较大的情况下振动变大。另外,在测定对象的表面粗糙度较小的情况下振动变小。触头340的材质为不锈钢、铜、黄铜等的金属。通过将触头340的材质设定为金属,能够将产生的较宽的频带、特别是高频带的振动传递至传感器351。需要说明的是,能够将触头340的材质设定为橡胶等的弹性体。通过将触头340的材质设定为弹性体,例如,能够模拟沿手指传播的振动。
152.测定对象与触头340接触,顶端部320以旋转轴线a为中心例如在箭头r1的方向旋转,从而产生触头140位移时的肌肤与触头140的摩擦力。通过后述的力传感器352对该摩擦力进行检测。
153.而且,对检测部300的构造进行详细说明。图15是本实施方式的测定装置的一个例子的检测部300的剖视图。图15是图13的本实施方式的测定装置2的检测部300的b
‑
b剖视
图。需要说明的是,在图15中,为了使图简略化,省略了一部分的构成等。
154.顶端部320包括控制单元壳体321和传感器壳体322。
155.控制单元壳体321包括控制单元下壳体321a和控制单元上壳体321b。另外,控制单元壳体321在其内部包括控制单元基板327。控制单元基板327包括用于将来自传感器350的信号通过无线发送至控制装置400的电路。在控制单元下壳体321a中连接有后述集电环334的旋转轴334a。传感器壳体322隔着振动吸收部件325载置且粘接于控制单元上壳体321b。振动吸收部件325由用于吸收振动的部件形成。作为用于吸收振动的部件,例如为发泡聚氨酯等的海绵体、橡胶等。振动吸收部件325是振动隔离部件的一个例子。
156.需要说明的是,自控制单元基板327向控制装置400发送的无线方式可以采用例如wi
‑
fi(注册商标)、bluetooth(注册商标)、zigbee(注册商标)等的依据无线通信规范的无线方式。
157.传感器壳体322包括传感器下壳体322a和传感器上壳体322b。另外,传感器壳体322在其内部包括传感器基板328。传感器基板328是包括对传感器350的信号进行检测,并且将检测的信号发送至控制单元基板327的电路的基板。传感器下壳体322a隔着振动吸收部件325粘接固定于控制单元上壳体321b。传感器上壳体322b包括开口。通过该开口,触头340经由连接部件329与传感器基板328连接。并且,传感器基板328在该连接部件329安装于传感器基板328的部分具有传感器350的力传感器352。而且,在传感器基板328的位于该力传感器352的背侧,传感器基板328具有传感器350的加速度传感器351。加速度传感器351为例如3轴的加速度传感器。另外,力传感器352例如为6轴的力传感器。
158.驱动部370例如为马达。驱动部370用于使旋转轴371旋转。需要说明的是,在图15中,省略了驱动部370内部的详细内容。驱动部370借助安装配件318安装于壳体311的侧盖313、314。需要说明的是,驱动部370借助由凝胶材料形成的凝胶衬套318a安装于安装配件318。由此,防止了在驱动部370产生的振动传播至壳体311。需要说明的是,电源、控制信号自控制电路380供给至驱动部370。
159.为了将顶端部320和驱动部370连结,检测部300包括磁力联接器332和集电环334。磁力联接器332和集电环334是连结部件的一个例子。
160.磁力联接器332是使用磁铁的非接触式的接头。通过借助磁力联接器332非接触地将顶端部320和驱动部370之间连接,能够防止来自驱动部370的振动传递至顶端部320。即,磁力联接器332是用于隔离自驱动部370向顶端部320的振动的振动隔离部件的一个例子。磁力联接器332包括联接盘332a和联接盘332b。联接盘332a和联接盘332b分别包括磁铁。在该磁铁的磁力作用下,联接盘332a和联接盘332b能够以非接触的状态传递力。联接盘332a借助衬套332a1与驱动部370的旋转轴371连接。联接盘332b借助衬套332b1与集电环334的旋转轴334a连接。
161.集电环334是用于自外部向旋转的构件传递电力、信号的连接器。在本实施方式的检测部300中,为了自主体部310向顶端部320的控制单元基板327和传感器基板328供给电力而使用集电环334。需要说明的是,在图15中,省略了集电环334内部的详细内容。用于自主体部310的控制电路380供给电力的配线与集电环334连接。自控制电路380供给的电力经由集电环334、具体而言通过集电环334的旋转轴334a被供给至控制单元基板327。集电环334借助安装配件319安装于壳体311的侧盖313、314。
162.需要说明的是,在本实施方式中,虽然在驱动部370和集电环334之间具有磁力联接器332,但是也可以将驱动部370和集电环334直接连接。另外,可以借助与磁力联接器332不同的其他的振动隔离部件、例如海绵体将驱动部370和集电环334连接。
163.这里,对借助振动隔离部件即海绵体333s将驱动部370和集电环334连接的变形例进行说明。
164.图16是本实施方式的测定装置的变形例的检测部300a的剖视图。图16是与图15的本实施方式的测定装置2的检测部300的剖视图对应的图。需要说明的是,在图16中,为了使图简略化,省略了一部分的构成等。另外,对于与图15的构成元件相同的构成元件,付与相同的附图标记,省略重复的说明。
165.为了将顶端部320和驱动部370连结,检测部300a包括海绵体联接器333和集电环334。海绵体联接器333和集电环334是连结部件的一个例子。
166.海绵体联接器333是通过海绵体333s将构件连接的部件。海绵体333s例如为发泡聚氨酯等的海绵体。通过海绵体联接器333将顶端部320和驱动部370之间借助海绵体333s连接,从而能够防止来自驱动部370的振动传递至顶端部320。即,海绵体联接器333是用于隔离自驱动部370向顶端部320的振动的振动隔离部件的一个例子。海绵体联接器333包括联接盘333a和联接盘333b。在联接盘333a和联接盘333b之间固定有海绵体333s。例如,联接盘333a以及联接盘333b分别与海绵体333s粘接。由此,联接盘333a和联接盘333b能够通过海绵体333s传递力。联接盘333a借助定位环333a1与驱动部370的旋转轴371连接。联接盘333b借助定位环333b1与集电环334的旋转轴334a连接。联接盘333a和定位环333a1或者联接盘333b和定位环333b1例如通过在形成于定位环333a1或定位环333b1中的螺纹孔中以螺钉进紧固来进行固定。另外,定位环333a1和旋转轴371以及定位环333b1和旋转轴334a例如通过设于在定位环333a1或定位环333b1中形成的螺纹孔中的止动螺钉对旋转轴371或旋转轴334a进行按压来进行固定。需要说明的是,对于固定方法,不限于螺钉,可以通过粘接剂等进行固定。另外,可以不使用定位环333a1、333b1而直接将旋转轴371、334a和联接盘333a、333b连接。
167.需要说明的是,可以替代海绵体联接器333的海绵体333s而使用橡胶、凝胶等用于防止振动的传递的部件。
168.<控制装置400>
169.接下来,返回图11,对控制装置400进行说明。
170.控制装置400包括信号处理部410和检测部控制部420。
171.信号处理部410用于接收来自检测部300的传感器350的信号。本实施方式的信号处理部410通过控制单元基板327无线接收来自传感器350的信号。信号处理部410对接收的信号进行滤波处理、放大处理,取得模拟/数字转换后的测定值。信号处理部410通过对取得的测定值进行处理,从而对肌肤的表面状态进行测量。例如,对测定值进行傅里叶变换,通过功率谱等进行测量。
172.检测部控制部420用于对检测部300的驱动部370进行控制。对于检测部控制部420进行的控制,其与第一实施方式的检测部控制部220相同。
173.<<第三实施方式>>
174.接下来,对第三实施方式进行说明。在第三实施方式中,示出了适合安装于机器人
臂等的检测部500。
175.<测定装置3>
176.图17是本实施方式的测定装置的一个例子的整体构成图。本实施方式的测定装置3包括检测部500和控制装置600。检测部500包括传感器550(加速度传感器551以及力传感器552)。检测部500和控制装置600通过无线以可通信的方式连接。本实施方式的测定装置3与测定装置1相同,对与触感相关联的肌肤的表面状态、例如肌肤的表面是否为光滑的状态等进行测定。
177.<检测部500>
178.首先,对检测部500进行说明。作为使检测部500相对于测定对象位移的驱动部,使用检测部500的外部的机器人臂等。因此,检测部500不需要包括第一个实施方式和第二实施方式的检测部包括的驱动部。因此,本实施方式的检测部500限定于用于对振动、力进行检测的传感器550所必须的构成来进行说明。
179.图18是第三实施方式的测定装置的一个例子的检测部500的立体图。图19是本实施方式的测定装置的一个例子的检测部500的剖视图。需要说明的是,在图19中,为了使图简略化,省略了一部分的构成等。
180.本实施方式的测定装置2的检测部500包括顶端部520和臂安装夹具515。安装于机器人臂等的检测部500通过在箭头p的方向将顶端部520按压于测定对象、例如人的手腕、脸颊等的肌肤,从而对肌肤的表面状态进行测定。
181.顶端部520包括控制单元壳体521和传感器壳体522。
182.控制单元壳体521包括控制单元下壳体521a和控制单元上壳体521b。另外,控制单元壳体521在其内部包括控制单元基板527。控制单元基板527是包括用于来自加速度传感器551和力传感器552(传感器550)的信号无线发送至控制装置600的电路的基板。对于无线方式,与第二实施方式的控制单元基板327相同。臂安装夹具515安装于控制单元下壳体521a。传感器壳体522隔着振动吸收部件525载置粘接于控制单元上壳体521b。振动吸收部件525由用于吸收振动的部件形成。作为用于吸收振动的部件,例如为发泡聚氨酯等的海绵体、橡胶等。振动吸收部件525是振动隔离部件的一个例子。
183.传感器壳体522包括传感器下壳体522a和传感器上壳体522b。另外,传感器壳体522在其内部包括传感器基板528。传感器基板528是包括用于对传感器550的信号进行检测,并且将检测的信号发送至控制单元基板527的电路的基板。传感器下壳体522a隔着振动吸收部件525粘接固定于控制单元上壳体521b。传感器上壳体522b包括开口。通过该开口,触头540借助连接部件529与传感器基板528连接。并且,传感器基板528在该连接部件529安装于传感器基板528的部分具有传感器550的力传感器552。而且,在传感器基板528的位于该力传感器552的背侧,传感器基板528具有传感器550的加速度传感器551。加速度传感器551为例如3轴的加速度传感器。另外,力传感器352例如为6轴的力传感器。
184.<控制装置600>
185.接下来,返回图17,对控制装置600进行说明。
186.控制装置600包括信号处理部610。
187.信号处理部610用于接收来自检测部500的传感器550的信号。本实施方式的信号处理部610借助控制单元基板527无线接收来自传感器550的信号。信号处理部610对接收的
信号进行滤波处理、放大处理,取得模拟/数字转换后的测定值。信号处理部610通过对取得的测定值进行处理,从而对肌肤的表面状态进行测量。例如,对测定值进行傅里叶变换,通过功率谱等进行测量。
188.<<第四实施方式>>
189.接下来,对第四实施方式进行说明。在第四实施方式中,示出了第二实施方式的检测部300的变形例。需要说明的是,以下第四实施方式的检测部700与控制装置400组合使用。
190.<检测部700>
191.作为检测部300的变形例,对检测部700进行说明。需要说明的是,对于与检测部300相同的构件,付与相同的附图标记而省略说明。检测部700包括相对于对测定对象进行按压的方向在垂直方向延伸的把持部。图20是本实施方式的测定装置的一个例子的检测部700的立体图。图21是本实施方式的测定装置的一个例子的检测部700的内部构成图。具体而言,图21是取下检测部700的壳体711的跟前侧一半,从而示出使内部露出的状态的图。需要说明的是,检测部700在壳体711的内部还包括未图示的电路基板、例如用于对电源基板、驱动部770进行驱动的驱动基板等。
192.检测部700包括主体部710和顶端部320。顶端部320以触头340自主体部710的按压环716的开口部露出的方式内置于主体部710。检测部700在箭头p1的方向将顶端部320按压于测定对象、例如人的手腕、脸颊等的肌肤,从而对肌肤的表面状态进行测定。顶端部320以旋转轴线c为中心在箭头r2的方向旋转。需要说明的是,对于旋转方向,不限于箭头r2的方向,例如,可以设定为在箭头r2的反方向旋转,也可以设定为在箭头r2的方向及其反方向反复旋转。
193.主体部710包括侧视时具有l字形的形状的壳体711。壳体711包括相对于对测定对象进行按压的方向(箭头p1的方向)在垂直方向延伸的把持部712、以及在对测定对象进行按压的方向(箭头p1的方向)延伸的按压部713。壳体711由abs树脂等形成。
194.按压部713的对测定对象进行按压一侧的端部713b在外侧的侧面形成有外螺纹。圆筒形的按压环716螺接于端部713b。在该按压环716的内侧以顶端部320的触头340在外部露出的方式具有顶端部320。
195.通过将按压环716的端面716a按压于肌肤,能够进行测定装置的按压方向的定位。自按压环716的端面716a至触头340的接触面的沿旋转轴线c的方向的距离能够通过改变螺接于端部713b的量而进行改变。另外,能够对顶端部320的触头340接触测定对象时的进行按压的力进行调整。需要说明的是,按压环816例如由聚甲基丙烯酸甲酯树脂(pmma)等形成。
196.主体部710在按压部713的内部包括用于使顶端部320旋转的驱动部770。即,主体部710包括用于内置驱动部770的壳体711。测定者通过把持把持部712来进行测定。测定者通过把持把持部712而使其朝向测定对象移动,从而将顶端部320按压于测定对象。在检测部700中,作为驱动部770,使用更小型的马达。通过使用小型的马达,能够将检测部700的整体的大小设定为较小。
197.检测部700为了将顶端部320和驱动部770连结而具有海绵体联接器733和集电环334。海绵体联接器733和集电环334是连结部件的一个例子。
198.海绵体联接器733是通过海绵体733s将构件连接的部件。海绵体733s例如为发泡聚氨酯等的海绵体。通过海绵体联接器733将顶端部320和驱动部770之间借助海绵体733s连接,从而能够防止来自驱动部770的振动传递至顶端部320。即,海绵体联接器733是用于隔离自驱动部770向顶端部320的振动的振动隔离部件的一个例子。
199.海绵体联接器733包括联接盘733a和联接盘733b。在联接盘733a和联接盘733b之间固定有海绵体733s。例如,联接盘733a以及联接盘733b各自与海绵体733s粘接。由此,联接盘733a和联接盘733b能够通过海绵体733s传递力。
200.联接盘733a通过定位环733a1与驱动部770的旋转轴连接。联接盘733b通过定位环733b1与集电环334的旋转轴连接。联接盘733a和定位环733a1、或者联接盘733b和定位环733b1例如通过在形成于定位环733a1或定位环733b1的螺纹孔中用螺钉紧固来进行固定。
201.另外,定位环733a1和驱动部770的旋转轴、定位环733b1和集电环334的旋转轴例如通过在形成于定位环733a1或定位环733b1的螺纹孔中设置的止动螺钉对旋转轴371或旋转轴334a进行按压来进行固定。需要说明的是,对于固定方法,不限于螺钉,也可以通过粘接剂等进行固定。另外,可以不使用定位环733a1、733b1而直接将各个旋转轴和联接盘733a、733b连接。
202.需要说明的是,驱动部770以及集电环334分别通过未图示的固定部件固定于壳体711。具体而言,驱动部770隔着由凝胶素材形成的凝胶衬套被压接于壳体711。另外,集电环334通过安装配件将轴承部分用螺钉固定于壳体711。
203.如变形例1的检测部700那样,通过包括相对于测定对象进行按压的方向在垂直方向延伸的把持部,在将测定对象按压于检测部700时,能够容易进行处理。
204.<<第五实施方式>>
205.接下来,对第五实施方式进行说明。在第五实施方式中,示出了第二实施方式的检测部300的变形例。需要说明的是,以下的第五实施方式的检测部800与控制装置400组合使用。在第五实施方式中,进一步进行检测器的小型化。
206.<检测部800>
207.作为检测部300的变形例,对检测部800进行说明。需要说明的是,对于与检测部300相同的构件,付与相同的附图标记,省略说明。图22是本实施方式的测定装置的一个例子的检测部800的立体图。图23是本实施方式的测定装置的一个例子的检测部800的内部构成图。具体而言,图23是取下检测部800的壳体811的跟前侧一半,从而示出使内部露出的状态的图。需要说明的是,检测部800在壳体811的内部还包括未图示的电路基板、例如用于对电源基板、驱动部870进行驱动的驱动基板等。
208.检测部800包括主体部810和顶端部320。顶端部320以触头340自主体部810的按压环816的开口部露出的方式内置于主体部810。检测部800通过在箭头p2的方向将顶端部320按压于测定对象、例如人的手腕、脸颊等的肌肤,从而对肌肤的表面状态进行测定。顶端部320以旋转轴线d为中心在箭头r3的方向旋转。需要说明的是,对于旋转方向,不限于箭头r3的方向,例如,可以设定为在箭头r3的反方向旋转,也可以设定为在箭头r3的方向及其反方向反复旋转。
209.主体部810包括壳体811。壳体811由abs树脂等形成。壳体811的对测定对象进行按压一侧的端部811b在外侧的侧面形成有外螺纹。圆筒形的按压环816螺接于端部811b。在该
按压环816的内侧以顶端部320的触头340在外部露出的方式具有顶端部320。
210.通过将按压环816的端面816a按压于肌肤,能够进行测定装置的按压方向的定位。自按压环816的端面816a至触头340的接触面的沿旋转轴线d的方向的距离能够通过改变螺接于端部811b的量来进行改变。另外,能够对顶端部320的触头340接触测定对象时的按压的力进行调整。需要说明的是,按压环816例如由聚甲基丙烯酸甲酯树脂(pmma)等形成。
211.主体部810在内部具有用于使顶端部320旋转的驱动部870。即,主体部810包括用于内置驱动部870的壳体811。测定者通过把持壳体811来进行测定。测定者通过把持壳体811而使其朝向测定对象移动,从而将顶端部320按压于测定对象。
212.检测部800为了将顶端部320和驱动部870连结而包括海绵体联接器833和集电环334。海绵体联接器833和集电环334是连结部件的一个例子。
213.海绵体联接器833是通过海绵体833s将构件连接的部件。海绵体833s例如为发泡聚氨酯等的海绵体。通过海绵体联接器833将顶端部320和驱动部870之间借助海绵体833s连接,从而能够防止来自驱动部770的振动传递至顶端部320。即,海绵体联接器833是用于隔离自驱动部870向顶端部320的振动的振动隔离部件的一个例子。
214.海绵体联接器833包括联接盘833a和联接盘833b。在联接盘833a和联接盘833b之间固定有海绵体833s。例如,联接盘833a以及联接盘833b分别与海绵体833s粘接。由此,联接盘833a和联接盘833b能够通过海绵体833s传递力。
215.联接盘833a通过定位环833a1与驱动部870的旋转轴连接。联接盘833b通过定位环833b1与集电环334的旋转轴连接。联接盘833a和定位环833a1、或者联接盘833b和定位环833b1例如通过在形成于定位环833a1或定位环833b1的螺纹孔中用螺钉紧固来进行固定。
216.另外,定位环833a1和驱动部870的旋转轴、以及定位环833b1和集电环334的旋转轴例如通过设于形成于定位环833a1或定位环833b1的螺纹孔中的止动螺钉对旋转轴371或旋转轴334a进行按压来进行固定。需要说明的是,对于固定方法,不限于螺钉,也可以通过粘接剂等进行固定。另外,可以不使用定位环833a1、833b1而直接将各个旋转轴和联接盘833a、833b连接。
217.需要说明的是,驱动部870以及集电环334分别通过未图示的固定部件固定于壳体811。
218.通过使用变形例2的检测部800,能够通过更小型的检测部进行测定。
219.<<第六实施方式>>
220.接下来,对第六实施方式进行说明。在第六实施方式中,示出第二实施方式的检测部300的变形例。需要说明的是,以下第六实施方式的检测部900与控制装置400组合使用。
221.<检测部900>
222.作为检测部300的变形例,对检测部900进行说明。需要说明的是,对于与检测部300相同的构件,付与相同的附图标记,省略说明。图24是本实施方式的测定装置的一个例子的检测部900的立体图。
223.本实施方式的测定装置的检测部900包括主体部910和顶端部920。顶端部920以触头940自主体部910的按压环916的开口部露出的方式内置于主体部910。检测部300通过在箭头p3的方向将顶端部920按压于测定对象、例如人的手腕、脸颊等的肌肤,从而对肌肤的表面状态进行测定。顶端部920以旋转轴线e为中心在箭头r4的方向旋转。需要说明的是,对
于旋转方向,不限于箭头r4的方向,例如可以设定为在箭头r4的反方向旋转,也可以设定为在箭头r4的方向及其反方向反复旋转。
224.主体部910包括中央部分变细的大致圆筒形的壳体911。壳体911由顶盖912、侧盖913、侧盖914、底盖915构成。壳体911的各盖部由丙烯腈/丁二烯/苯乙烯共聚树脂(abs树脂)等形成。
225.在顶端具有环状的平面916a的圆筒形的按压环916螺接于顶盖912的上部。在该按压环916的内侧以顶端部920的触头940在外部露出具有顶端部920。
226.通过将按压环916的平面916a按压于肌肤,能够进行测定装置的按压方向的定位。自按压环916的平面916a至触头940的接触面的沿旋转轴e的方向的距离能够通过改变螺接于顶盖912的量来进行改变。而且,能够改变自按压环916的平面916a至触头940的接触面的沿旋转轴线a的方向的距离。另外,能够对顶端部920的触头940接触测定对象时的按压的力进行调整。需要说明的是,按压环316例如由聚甲基丙烯酸甲酯树脂(pmma)等形成。
227.按压环916在侧面具有多个(在本实施方式中为6个)开口916h。通过具有开口916h,能够使空气自被测定对象和按压环916包围的空间逃逸。
228.对于主体部910的壳体911的内部,与第二实施方式的检测部300的壳体311的内部相同。
229.触头940是用于与测定装置的测定对象接触的部件。触头940与测定对象接触。根据测定对象、测定的目的不同,触头340所接触的面可以为平面,也可以在表面存在凹凸。在触头940的下方,与检测部300相同,具有加速度传感器351和力传感器352。
230.本实施方式的检测部900还包括触头940a。触头940a设于相对于旋转轴e与触头940对称的位置。通过将触头940a设于相对于旋转轴e与触头940对称的位置,能够使触头940平衡良好地接触测定对象。另外,通过触头940和触头940a这两者与测定对象接触,能够将产生的振动的大小设定为较大。
231.需要说明的是,除了触头940的下方的加速度传感器351和力传感器352之外,在触头940a的下方可以还具有加速度传感器、力传感器,也可以不具有加速度传感器、力传感器。触头940a的数量不限于一个,也可以设置两个以上。另外,触头940a的位置只要是与测定对象接触的位置即可,不限于对象的位置。但是,期望触头940配置为平衡性良好地进行接触。触头940a是接触部的一个例子。
232.<<第七实施方式>>
233.在第七实施方式中,对通过控制装置进行的信号处理进行说明。这里,作为例子使用第二实施方式的检测部300a,对在控制装置400进行的处理进行说明。
234.<推定的评价值>
235.控制装置400使用在检测部300a的测定结果,对于被测者的肌肤,进行肌肤的湿润度、肌肤的光滑度、角质层水分量以及肌理的状态的推定。另外,控制装置400使用在检测部300a的测定结果,进行被测者的年龄的推定。
236.<评价试验的详细内容>
237.关于被测者,对事先通过书面同意参加试验的20岁至69岁的日本人女性31名以及居住在日本的外国籍的女性28名的合计59名进行评价。被测者在试验前进行卸妆,洗脸后,在室温23℃、湿度45%的恒温恒湿环境下安静待机之后进行测量。
238.首先,对于被测者的脸颊部位,实施基于两名专门评价者的触诊。各专门评价者对于肌肤的湿润度和肌肤的光滑度这两个项目进行评价。对于肌肤的湿润度,对于肌肤是否“湿润”或“干燥”,以5阶段进行评价而使其数值化。另外,对于肌肤的光滑度,对于肌肤是否“光滑”或“粗糙”,以5阶段进行评价而使其数值化。
239.接下来,在专门评价者进行评价后,对于相同的部位,使用检测部300a进行测量。测量是以旋转轴线a为中心使检测部300a的触头340以旋转角速度205deg/s进行旋转来进行的。在测量中,通过加速度传感器351对在肌肤上移动时的3轴的加速度进行测量。另外,通过力传感器对在肌肤上移动时的6轴的力进行测量。
240.另外,同时进行基于用于肌肤状态的评价的市售的传感器的测量。使用skicon
‑
200ex(yayoi co.ltd),对角质层水分量进行测量。另外,使用视频显微镜(skin visiom ii,shiseido co.ltd)对肌理的状态(用数值表示肌理的好坏)进行测量。
241.而且,对于由检测部300a测量的结果、基于专门评价者的肌肤的湿润度和肌肤的光滑度、基于传感器的角质层水分量和肌理的状态、以及被测者的年龄,分别制作了统计模型。而且,使用该统计模型,由通过检测部300a测量的结果,对于肌肤的湿润度、肌肤的光滑度、角质层水分量、肌理的状态以及被测者的年龄分别进行了推定。
242.<评价试验的详细内容>
243.接下来,对测定装置的控制装置400进行的推定处理的详细内容进行说明。
244.[测定数据]
[0245]
(1)加速度(振动特征量)
[0246]
控制装置400的信号处理部410取得来自检测部300a的加速度传感器351的3轴的加速度数据。信号处理部410在3轴的加速度数据之中使用旋转的触头340的旋转方向的加速度成分进行解析。信号处理部410对重力方向的加速度成分进行快速傅里叶变换(fft(fast fourier transform)),计算出振幅频谱。具体而言,信号处理部410自开始测定2秒后,对于触头340旋转两周的期间(3512(毫秒)=(360(deg)
×
2)/(205(deg/秒))
×
1000)的加速度数据进行快速傅里叶变换(fft),从而计算出频率0khz至1000khz的振幅频谱。而且,信号处理部410对于计算出的振幅频谱,每10hz频率求平均值。如后所述,信号处理部410将该振动频谱的平均值(100维振动频谱)作为各被测者的振动特征量来进行推定。
[0247]
(2)力(摩擦特征量)
[0248]
控制装置400的信号处理部410取得来自检测部300a的力传感器352的6轴的力数据。信号处理部410在6轴的力数据之中使用旋转的触头340的旋转方向的力成分fx和压入方向(触头340的与接触面341垂直的方向)的力成分fz来进行解析。信号处理部410使用旋转的触头340的旋转方向的力成分fx和压入方向的力成分fz,使用下述式1计算摩擦系数μ。
[0249]
μ=fx/fz
···
(式1)
[0250]
具体而言,信号处理部410自开始测定2秒后,对于触头340旋转两圈的期间(3512(毫秒)=(360(deg)
×
2)/(205(deg/秒))
×
1000)的力数据计算出摩擦系数μ。并且,信号处理部410对于计算出的摩擦系数μ求得触头340旋转两周的期间中的平均值。如后所述,信号处理部410将该摩擦系数μ的平均值作为各被测者的摩擦特征量来进行推定。
[0251]
[推定模型的计算]
[0252]
信号处理部410通过上述求出得振动特征量以及摩擦特征量,计算出用于推定肌
肤的湿润度、肌肤的光滑度、角质层水分量、肌理的状态以及被测者的年龄的统计模型。
[0253]
信号处理部410使用偏最小二乘回归来构建统计模型。在本实施方式中,将肌肤的湿润度、肌肤的光滑度、角质层水分量、肌理的状态以及被测者的年龄分别设定为目的变量。并且,对于各个目的变量,将上述计算出的振动特征量以及摩擦特征量或振动特征量设定为解释变量。需要说明的是,将振动特征量以及摩擦特征量设定为解释变量的情况下的统计模型称为模型1。另外,将振动特征量设定为解释变量的情况下的统计模型称为模型2。
[0254]
首先,各解释变量进行标准化,使得平均值为0,标准偏差为1。接下来,使用偏最小二乘回归构建统计模型。
[0255]
为了决定偏最小二乘回归的统计模型中的成分数,改变成分数,调查了透明模型的均方误差(mse(mean squared error))、推定值、观测值之间的相关系数。在本实施方式中的运算中,重复20次10折交叉验证法,求出均方误差(mse)以及相关系数的平均值。
[0256]
对于各目的变量,图25至图34是示出第七实施方式的测定装置的运算结果的图。对各目的变量进行说明。
[0257]
[肌肤的湿润度]
[0258]
图25是示出将目的变量设定为肌肤的湿润度而使成分数改变时的均方误差(mse)图。图26是示出将目的变量设定为肌肤的湿润度而使成分数改变时的相关系数的图。在图25、图26的图表中,x1是模型1的运算结果,y1是模型2的运算结果。
[0259]
如图25所示,在模型1中成分数5的情况下(图25的x1a),均方误差(mse)最小。另外,在模型2中成分数4的情况下(图25的y1a),均方误差(mse)最小。
[0260]
如图26所示,在模型1中,在均方误差(mse)最小的成分数5的情况下(图26的x1b),相关系数最大。另外,在模型2中,在均方误差(mse)最小的成分数4的情况下(图26的y1b),相关系数最大。
[0261]
[肌肤的光滑度]
[0262]
图27是示出将目的变量设定为肌肤的光滑度而使成分数改变时的均方误差(mse)的图。图28是示出将目的变量设定为肌肤的光滑度而使成分数改变时的相关系数的图。在图27、图28的图表中,x2是模型1的运算结果,y2是模型2的运算结果。
[0263]
如图27所示,在模型1中成分数2的情况下(图27的x2a),均方误差(mse)最小。另外,在模型2中成分数1的情况下(图27的y2a),均方误差(mse)最小。
[0264]
如图28所示,在模型1中均方误差(mse)最小的成分数2的情况下(图28的x2b),相关系数最大。另外,在模型2中均方误差(mse)最小的成分数1的情况下(图26的y2b),相关系数最大。
[0265]
[角质层水分量]
[0266]
图29是示出将目的变量设定为角质层水分量而使成分数改变时的均方误差(mse)的图。图30是示出将目的变量设定为角质层水分量而使成分数改变时的相关系数的图。在图29、图30的图表中,x3是模型1的运算结果,y3是模型2的运算结果。
[0267]
如图29所示,在模型1中成分数3的情况下(图29的x3a)均方误差(mse)最小。另外,在模型2中成分数3的情况下(图29的y3a)均方误差(mse)最小。
[0268]
如图30所示,在模型1中均方误差(mse)最小的成分数3的情况下(图30的x3b),相关系数最大。另外,在模型2中成分数4的情况下(图30的y3c),相关系数最大。需要说明的
是,在模型2中均方误差(mse)最小的成分数3的情况下(图30的y3b),成为大致与成分数4相同的相关系数。
[0269]
[肌理的状态]
[0270]
图31是示出将目的变量设定为肌理的状态而使成分数改变时的均方误差(mse)的图。图32是示出将目的变量设定为肌理的状态而使成分数改变时的相关系数的图。在图31、图32的图表中,x4是模型1的运算结果,y4是模型2的运算结果。
[0271]
如图31所示,在模型1中成分数2的情况下(图31的x4a),均方误差(mse)最小。另外,在模型2中成分数2的情况下(图31的y4a),均方误差(mse)最小。
[0272]
如图32所示,在模型1中均方误差(mse)最小的成分数2的情况下(图32的x4b),相关系数最大。另外,在模型2中均方误差(mse)最小的成分数2的情况下(图32的y4b),相关系数最大。
[0273]
[被测者的年龄]
[0274]
图33是示出将目的变量设定为被测者的年龄而使成分数改变时的均方误差(mse)的图。图34是示出将目的变量设定为年龄而使成分数改变时的相关系数的图。在图33、图34的图表中,x5是模型1的运算结果,y5是模型2的运算结果。
[0275]
如图33所示,在模型1中成分数2的情况下(图33的x5a),均方误差(mse)最小。另外,在模型2中成分数2的情况下(图33的y5a),均方误差(mse)最小。
[0276]
如图34所示,在模型1中均方误差(mse)最小的成分数2的情况下(图34的x5b),相关系数最大。另外,在模型2中均方误差(mse)最小的成分数2的情况下(图34的y5b),相关系数最大。
[0277]
由以上的结果,在模型1、模型2中,通过求出均方误差(mse)最小的成分数,从而能够将相关系数设定为较高。因此,在本实施方式中,最终采用均方误差(mse)最小的成分数的情况下的统计模型。
[0278]
对于各目的变量和各模型,在表1中示出汇总了均方误差(mse)最小的成分数、该成分数的均方误差(mse)以及相关系数的表。
[0279]
(表1)
[0280][0281]
由以上的结果,在将目的变量设定为肌肤的湿润度、肌肤的光滑度、角质层水分量、肌理的状态以及被测者的年龄的情况下,在模型1、模型2中均能观察到相关关系。因此,给出了通过使用模型1(作为解释变量使用振动特征量以及摩擦特征量的模型)以及模型2(作为解释变量使用振动特征量的模型)能够推定素肌肤的感官评价、肌肤状态、年龄的启示。另外,对于肌肤的湿润度、肌肤的光滑度、角质层水分量,模型1(作为解释变量使用振动特征量以及摩擦特征量的模型)的相关系数较大,给出了使用振动和摩擦这两者的优势的启示。
[0282]
<<第八实施方式>>
[0283]
在第八实施方式中,对由控制装置进行的信号处理进行说明。这里,作为例子使用第二实施方式的检测部300a,对控制装置400进行的处理进行说明。
[0284]
进行了触感不同的两种化妆水的触感评价。使用一种是清爽类型的化妆水,另一种是湿润类型的化妆水。涂敷部位设定为脸的脸颊,用化妆棉进行涂敷。测量实施三次。分别是涂敷前的本来的肌肤、涂敷后经过1分钟后、以及经过2分钟后。
[0285]
对于涂敷后经过1分钟后的摩擦系数,每一种化妆水均上升。涂敷后经过2分钟后的清爽化妆水的摩擦系数降低,湿润化妆水的摩擦系数上升。
[0286]
涂敷后经过1分钟后的湿润化妆水的振动降低,清爽化妆水的振动与本来的肌肤相同。虽然涂敷后经过2分钟后的湿润化妆水的振动与1分钟后相比上升,但是与本来的肌肤的振动相比为较低的值。涂敷后经过2分钟后的清爽化妆水的振动不改变,与本来的肌肤相同。
[0287]
如图35、图36所示,能够以两种化妆水对不同的振动和摩擦举动进行测量。在对化妆水那样的触感以时间序列改变的对象进行评价时,难以再现相同的条件。由于本测定装置能够同时对振动和摩擦进行测量,因此对于触感改变的对象的评价是非常有用的。
[0288]
需要说明的是,应认为在此公开的实施方式的全部的点为例示而非限制。上述实施方式可以不超过附加的权利要求术的范围及其主旨而以各种方式进行省略、置换、改变。
[0289]
本技术要求在日本专利局于2019年6月6日申请的基础专利申请2019
‑
106429号以及在日本专利局于2019年10月29日申请的基础专利申请2019
‑
196477号的优先权,并且在此通过参照引用其全部内容。
[0290]
附图标记说明
[0291]1ꢀꢀꢀꢀꢀ
测定装置
[0292]2ꢀꢀꢀꢀꢀ
测定装置
[0293]3ꢀꢀꢀꢀꢀ
测定装置
[0294]
100
ꢀꢀꢀ
检测部
[0295]
110
ꢀꢀꢀ
主体部
[0296]
111
ꢀꢀꢀ
壳体
[0297]
120
ꢀꢀꢀ
顶端部
[0298]
122
ꢀꢀꢀ
下部振动吸收部件
[0299]
124
ꢀꢀꢀ
上部振动吸收部件
[0300]
125
ꢀꢀꢀ
上部支承部件
[0301]
130
ꢀꢀꢀ
连结轴
[0302]
140
ꢀꢀꢀ
触头
[0303]
150
ꢀꢀꢀ
传感器
[0304]
170
ꢀꢀꢀ
驱动部
[0305]
200
ꢀꢀꢀ
控制装置
[0306]
210
ꢀꢀꢀ
信号处理部
[0307]
300
ꢀꢀꢀ
检测部
[0308]
310
ꢀꢀꢀ
主体部
[0309]
311
ꢀꢀꢀ
壳体
[0310]
320
ꢀꢀꢀ
顶端部
[0311]
325
ꢀꢀꢀ
振动吸收部件
[0312]
332
ꢀꢀꢀ
磁力联接器
[0313]
333
ꢀꢀꢀ
海绵体联接器
[0314]
334
ꢀꢀꢀ
集电环
[0315]
340
ꢀꢀꢀ
触头
[0316]
350
ꢀꢀꢀ
传感器
[0317]
370
ꢀꢀꢀ
驱动部
[0318]
400
ꢀꢀꢀ
控制装置
[0319]
410
ꢀꢀꢀ
信号处理部
[0320]
500
ꢀꢀꢀ
检测部
[0321]
520
ꢀꢀꢀ
顶端部
[0322]
525
ꢀꢀꢀ
振动吸收部件
[0323]
540
ꢀꢀꢀ
触头
[0324]
550
ꢀꢀꢀ
传感器
[0325]
600
ꢀꢀꢀ
控制装置
[0326]
610
ꢀꢀꢀ
信号处理部
[0327]
700
ꢀꢀꢀ
检测部
[0328]
800
ꢀꢀꢀ
检测部
[0329]
900
ꢀꢀꢀ
检测部
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1