带棘轮锁的生物医学手指组件的制作方法
带棘轮锁的生物医学手指组件
1.相关申请交叉引用
2.本技术要求2019年9月23日提交的美国临时专利申请no.62/904,506的优先权,其全部内容通过引用并入本文。
技术领域
3.本技术大体上涉及一种可调节假体,以在掌指关节处或近侧替换手指或拇指。
背景技术:
4.部分手损失是最常见的上肢截肢,并且传统治疗历来不能提供充分服务。大多数手部截肢的起源是创伤性的,许多截肢发生在进行体力劳动的工作场所。部分失手会改变分拣邮件,演奏乐器,重返职业,甚至穿衣,切菜,或拿食物的能力。这种伤害是如此毁灭性,以至于体力劳动者往往无法重返同一工作岗位。
5.功能性部分手部假体指干预的主要目标是恢复对抗抓握:拇指和其他手指之间的足够有力的抓握,从而可以稳定和操纵物体。然而,由于截肢后的解剖和功能性表现范围广泛,以及替代强大,灵巧,和小部分人手的复杂性,传统技术难以提供恢复性干预。部分手损失包括腕骨远侧或通过腕骨的任何截肢,包括手指损失。在这个定义中,可以考虑四个不同的区域:(1)掌指关节(mcp,或“指关节”)远侧;(2)在mcp关节处或近侧,但在腕骨远侧(经掌骨);(3)在腕骨处;和(4)鱼际(全部或部分拇指)。
6.可用于经掌骨部分手部截肢者的假体干预大致可分为三类:(1)美容修复;(2)被动假体;(3)被驱动的(主动)假体。美容修复描述了一种逼真的硅胶修复,旨在类似于原来的解剖结构,其几乎完全为个人提供心理社会支持,功能能力非常有限。虽然在康复过程中非常宝贵,但美容恢复通常在几年内就被放弃了。
7.被动假体是非主动驱动的设备。这些假体可以是特定任务的末端执行器,例如适合安装在自行车车把上的手柄,可以为特定活动戴上和脱下。被动假体指还包括用于恢复手部对抗抓握的固定柱,或者在固定柱的拇指和完整的手指之间,或者在完整的拇指和固定的手指之间。近年来,这种被动类别已扩展到包括可调节的对抗系统。这些设备通常替代指,并具有一个,两个,或三个模拟mcp,pip,和dip关节的关节。该设备还可以应用于任何上肢截肢的插口,例如用于机制的末端执行器(例如,应用于经桡动脉截肢)。它们是弹簧加载的并可调节到代表指方向不同角度的几种姿势。由于其坚固的性质和简单性,被动假体通常是在体力劳动环境中重返工作岗位最常用的选择。
8.主动假体可以由身体或电力提供动力。身体动力设备通常由更近侧的完整关节经由连杆机构,缆线,或带子操作。一些系统使用穿过腕关节的缆线来驱动人造手指以响应手腕屈曲。一个示例性的部分手部系统使用肩带以打开/关闭方式驱动手指或拇指。电动部分手部解决方案通常具有单独的电动手指,并依靠安装在前臂上的电池组和肌电信号来生成用手指的多个手抓握。这些系统的一个缺点是抑制手腕运动且会对湿气敏感。由于力量弱和部件敏感,身体动力和电力驱动部分手部系统历来受到它们的使用环境的限制。
附图说明
9.参考以下附图可以更好地理解本技术的许多方面。附图中的部件不一定按比例绘制。相反,重点放在清楚地说明本技术的原理上。此外,部件可以在某些视图中显示为透明,这仅是为了说明清楚,而不是表示部件必须是透明的。部件也可以被示意性地显示。
10.图1a和1b分别显示了根据本技术的实施例配置的三段假体指的正视图和透视图。
11.图2a-2c分别显示了图1a和1b的显示为完全伸展的三段假体指的正视图,横截面图,和透视图。
12.图2d和2e分别显示了图1a和1b的三段假体指的近侧和远侧四连杆机构的旋转连接的正视图。
13.图3a-3c分别显示了图1a和1b的显示为完全屈曲的假体指的透视图,正视图,和横截面图。
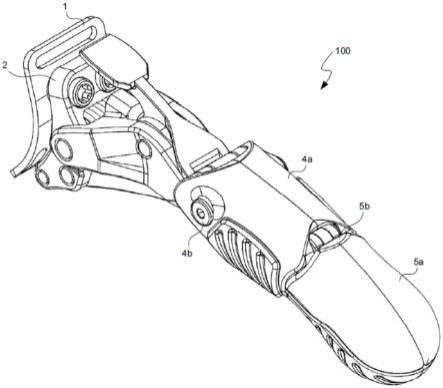
14.图4a和4b显示了根据本技术的另一个实施例配置的两段假体指的正视图。
具体实施方式
15.a.概述
16.本技术涉及一种被配置为代替手指或拇指的假体指。在其他用途中,假体通常被设计成提供可调节性,强度,和对驱动(完整的或假体的)拇指或指的刚性对抗。如下文更详细解释的,假体可以被调节到多个位置,代表手指的增加屈曲,并且由弹簧加载的棘爪和具有多个齿的齿条之间的相互作用控制。在所示实施例中,假体被显示为具有位于第一段中的齿条并且具有对应于齿条的齿的十个位置;然而,齿条可以位于假体的其他段(例如,第二段,第三段等)并且可以具有任意数量的调整位置。当指被屈曲移动时,棘爪在屈曲方向上在齿条齿上自由移动,但由于棘爪鼻部与齿条齿的配合而在伸展方向上被停止。这种棘轮锁配置相应地提供了将物体保持在屈曲位置,抵靠可相对的指,和/或在用户的手掌中所需的对抗。
17.通常希望假体指轻巧,紧凑,坚固,并且包括自然运动模式。根据本技术配置的指可以通过提供对完整指的对抗来恢复缺少手指或拇指的人的抓握力(prehension),从而可以执行物体的操纵和稳定。指可以表现出有助于自然抓握模式的运动学运动轮廓,并经由弹簧加载的棘爪和锁定齿条棘轮机制提供对伸展方向上的力的对抗,从而允许个人操纵或稳定物体。指可以通过扭簧或其他偏置构件在伸展方向上被弹簧加载。当指达到完全屈曲时,棘爪可以自动脱离齿条,并且完全屈曲脱离停止件可以是可调节的。当指完全伸展时,棘爪可自动与齿条配合,且伸展止动器可以是可调节的。棘爪可包含横向特征,该横向特征在加载下与锚固连杆机构产生阻碍并限制该结构的偏转。还必须对临床插接过程进行实际考虑,这决定了经由紧密适配的安装插口将该指施用到用户的手上。
18.该指可以通过用户的另一只手,其他物体,或通过由更近侧的关节或外部电源控制的路由肌腱,或其他移动选项被移动到新位置。棘爪机制和周围的连杆可以结合一个切换装置,其被配置为选择性地禁用棘轮功能并将该指置于“自由运动”模式,使得棘轮机制不会停止该指的伸展。在这方面,该指可以用作可调节的对抗系统或被驱动的指,以提供抓握模式,例如动力钩,钥匙,和圆柱形抓握,以及其他模式和位置。执行这些和其他可能的抓握的能力是日常生活活动(adl)的一部分。
19.在下面呈现的描述中使用的术语旨在以其最广泛合理的方式来解释,即使它是结合本技术的某些具体实施例的详细描述使用的。下面甚至可能会强调某些术语;然而,旨在以任何受限方式解释的任何术语将在本详细描述部分中被公开且具体地定义。此外,本技术可以包括在权利要求的范围内,但是没有关于图1-4b详细描述的其他实施例。
20.在整个说明书中对“一个实施例”或“一实施例”的引用意味着结合该实施例描述的特定特征,结构,或特性被包括在本技术的至少一个实施例中。因此,在整个说明书的多个地方出现的短语“在一个实施例中”或“在一实施例中”不一定都指同一实施例。此外,特定特征或特性可以在一个或多个实施例中以任何合适的方式组合。
21.b.假体指的所选择的实施例
22.图1a和1b分别显示了根据本技术的实施例配置的三段假体指100(“指100”)的正视图和透视图。指100可以被安装到供用户使用的刚性或柔性基板(未示出),其可以包括插口(例如,部分手插口,经桡动脉插口等)或框架。基板在用户解剖指的大致位置将指100固定在用户手上。在一些实施例中,可以以非解剖方式安装指100,例如在独特临床表现的情况下。指100通常包括被配置为被附到或嵌入到用户的插口中的锚固件1,以及经由紧固件或任何其他合适的附接方法附接的指100的基件2。通过从锚固件1上移除基件2,可以将指100从手部分离。指100包括第一,第二,和第三段p1,p2,和p3,通常代表手指的骨头,以及其间的连接代表mcp,pip,和dip关节。
23.在图1a和1b所示的实施例中,指100包括所安装的装饰和抓持整流罩(fairings)4a和5a。整流罩4a和5a可以包括具有增加的抓持材料的部分,其被配置成增加整流罩4a和5a的摩擦力。整流罩4a可以通过第一安装点4b处的紧固件被安装到指100,并且整流罩5a可以通过第二安装点5c处的紧固件被安装到指100(参见图2b,紧固件未显示)。整流罩4a和5a中的一个或多个可以包括释放切口5b以允许指100的p2和p3部分的耦接的伸展范围。这些整流罩可以提供硅树脂接口用于增强与物体的抓持,并允许用户选择设计和颜色,或在磨损发生时更换这些装饰件。
24.锚固件1可以被配置为附接到或嵌入在用户的残端接口(未显示)中,并且可以包括被设计成允许与所制造的插口成功集成的特征。这些材料可以耐高温,以承受插口制造中预计的放热环氧树脂反应。锚固件1还可以包括多种槽,孔,和其他附接特征,旨在允许与碳纤维,环氧树脂,硅树脂,和通常在假体领域中使用的其他锚固方法成功集成。
25.图2a-2c分别显示了图1a和1b的假体指100的正视图,横截面图,和透视图,其仍处于完全伸展状态,但为了说明而移除了整流罩4a和5a。指100可以包括经过偏移的旋转关节a1,b1的第一对交叉连杆机构6和7a。例如,连杆机构7a可以包括多个齿条齿7b,该齿条齿7b被设计成配合棘爪3a的棘爪鼻部3b,从而允许在屈曲方向上自由运动(例如,朝向图3a-3c所示的位置运动),并在伸展方向创建结构位置锁。齿条齿7b被配置成与棘爪鼻部3a接合并且可以由硬化钢或其他足够坚固且耐磨的材料制成。棘爪3a通过销11以旋转销接方式被连接到连杆机构6,并且可以经由弹簧加载的止动器12a与齿条齿7b配合/脱离,该止动器12a具有被安装在棘爪3a的近侧下侧和连杆机构6中的止动构件12b(参见图2b)。在其他实施例中,齿条齿位于或耦合到指100的任何合适的连杆机构(例如连杆机构6,8,9,10等)上,并且在这些在配置中,棘爪可以被配置为与齿条齿接合,允许在屈曲方向上自由运动,并在伸展方向上锁定指100的位置。
26.棘爪3a可以经由近侧弹簧加载止动器12a和12b在至少两个位置之间移动:(a)配合,使得止动构件12b与棘爪3a的配合表面17b接合;(b)脱离,使得止动构件12b与棘爪3a的脱离表面17c接合。配合表面17b和脱离表面17c由过渡峰17a隔开,过渡峰17a被安置以防止止动构件12b在配合表面17b和脱离表面17c之间停滞(settling)。在一些实施例中,配合表面17b和脱离表面17c中的一者或两者具有欧拉曲线的轮廓形状(例如,如图2b中的指100的方向所观察的),其被配置为当棘爪3a在运动范围内旋转时,使止动构件12b在棘爪3a上的力变化最小化。在这些配置中,通过在止动构件12b与配合表面17b和/或脱离表面17c之间保持基本恒定的接触角来最小化压力变化。
27.为了在伸展方向上移动指100,通过将弹簧止动器12a移动到脱离位置来脱离棘爪3a,在该脱离位置,止动构件12b与脱离表面17c接合,从而允许指100通过将棘爪鼻部3b从齿条齿7b脱离来朝向伸展自由地移动。在该脱离位置,在指100完全伸展时,棘爪3a经由硬停止件14被强制回到配合位置(如图2a中最佳所示)。
28.弹簧加载的止动器12a可以是带螺纹的并且可调节以解决公差叠加。例如,在图示的实施例中,弹簧加载的止动器12a包括弹簧加载的圆形柱塞,该柱塞在被按压时偏转。柱塞表面在棘爪3a的近侧弯曲部分(例如,17b)上滑动并用作止动器,将棘爪3a保持在配合或脱离位置。在组装时,弹簧止动器的线性位置可以被调节到与配合位置和脱离位置之间的舒适切换相对应的适当弹簧加载,并且可以被进一步调节以考虑到用户偏好,以对应于特定安装等。
29.在一些实施例中,锚固件1和基件2可以被配置成使得部件之间只有一个附接方向是可能的。然而,在其他实施例中,部件具有多种可能的附接方向。基件2可包括扭转弹簧16(见图3a),其在系统上施加恒定的伸展方向力,用于将棘爪鼻部3b维持在与齿条齿7b的接合位置并且当棘爪3a与齿条齿7b脱离时使系统返回伸展。例如,扭转弹簧16可以将指100偏向图1a-2c所示的伸展位置。扭转弹簧16至少有两个目的:(1)迫使棘爪鼻部3b与齿条齿7b配合,从而在用户选择后保持姿势;(2)当棘爪鼻部3b与齿条齿7b脱离时,自动将指100返回伸展。
30.参考图2a,指100还可以包括连杆机构8,9,和10,它们形成耦合的远侧四连杆机构(图2e)的一部分以与近侧四连杆机构(图2d)相互作用,以为指100创建一个类似于解剖手指的相对平滑,令人满意的运动,和运动学空间。连杆机构6,7a,8,9和10经由旋转连接形成两个串联的四连杆机构。图2d和2e分别显示了指100的近侧和远侧四连杆机构的旋转连接的正视图。例如,图2d显示了段p1的近侧四连杆机构的旋转连接。段p1的近侧四连杆机构在旋转连接a1和旋转连接b1处被可旋转地耦合到基件2。当指100从完全伸展(图2a-2c)转变到完全屈曲(图3a-3c)时,连杆机构6和7a围绕旋转连接a1和b1顺时针旋转(图2d和2e中的cw方向;逆时针ccw方向)。在这种顺时针旋转期间,连杆机构6和7a围绕销11相对于彼此相对旋转。连杆机构6和7a围绕销11的相对旋转导致旋转连接b2相对于旋转连接a2沿顺时针轨道路径移动并彼此分开。
31.图2e示出了段p2的远侧四连杆机构的旋转连接。段p2的远侧四连杆机构在旋转连接a2和b2处被可旋转地耦合到段p1的近侧四连杆机构。在上述从完全伸展向完全屈曲的旋转过程中,旋转连接b2围绕旋转连接a2顺时针轨道旋转并与旋转连接a2分开,并导致连杆机构8围绕旋转连接b3相对于至少连杆机构6和7a沿顺时针方向旋转。这种旋转导致连杆机
构9围绕旋转连接b2相对于连杆机构6顺时针旋转。随着连杆机构8顺时针旋转,连杆机构10也相对于旋转连接b3顺时针旋转,并且进一步地,连杆机构9和10的相对运动导致连杆机构9和10围绕旋转连接d反向旋转,这又使得连杆机构10围绕旋转连接t顺时针旋转。上述段p1和p2的连杆机构的旋转位置通过比较图2b中部件的位置和图3c中部件的位置,可以进一步被理解。
32.假体指100对抗伸展运动,允许抓持和操纵物体以将物体保持在屈曲位置,抵靠可对抗指100s,和/或在手掌中。假体的一个强有力的方向是“动力钩抓握”。这种抓握位置在adl中使用,例如通过把手提起一桶水,或携带塑料杂货袋及其他adl。当棘爪被配合在齿条齿的中间位置(例如,图2a-2c(可调节的完全伸展)和图3a-3c(可调节的完全屈曲)中位置的中间位置)时出现实现动力钩抓握所需的姿势。当指100被加载在动力钩抓握位置时,近侧连杆机构6和7a具有随着设备向伸展位置偏转而趋于使它们更靠近在一起的力。这种配置在棘爪3b的鼻部施加了压缩载荷,这导致在压配合销11上产生双剪载荷(double-shear load),趋向于将棘爪3a固定到连杆机构6。
33.前述动力钩抓握加载配置还可以导致连杆机构6和7a之间的展开变形并且迫使棘爪3b的鼻部在近侧方向上远离齿条齿7b。在一定的变形程度下,棘爪3a可能过度切换和翻转,使得鼻部3b向近侧移动并且失去在齿条齿7b上的紧握(purchase),导致机制失效,并且可能损坏部件。为了防止这种过度切换,棘爪3a可以包括一个或多个棘爪挡块(dog)15以减少连杆机构6和7a之间的偏转,并增加指100的承载能力。在测试指100的动力钩抓握的一个示例中,指100的加载能力在加有棘爪挡块15的时候而增加约300%。棘爪挡块15与锚固连杆机构6接合,使得当由于加载而发生偏转时,棘爪挡块15接触锚固连杆机构6的侧部,这将加载重定向到连杆机构6和7之间的较低偏转状态并防止上述棘爪过度切换,因此增加了指100的加载能力。
34.图3a-3c分别显示了图1a和1b的假体指100在完全屈曲时的透视图,正视图,和横截面图,为了说明而移除了整流罩4和5。在完全屈曲的位置,可调节的硬停止件13迫使棘爪3a进入脱离位置,在该位置,止动构件12b与脱离表面17c接合。硬停止件13允许用户经由桌面,另一只手,或其他物体完全屈曲指100,并经由扭转弹簧16将其返回到伸展位置(如图1a-2c所示)。完全屈曲硬停止件13可以是可调节的,从而允许插口构造和手指放置的变化。例如,如果临床技术人员在将锚固件1嵌入插口中时将指100朝向用户手掌过度旋转,则指100可能由于机制的尖端过早地撞击用户的手掌而无法实现不可调节的完全屈曲硬停止脱离点。即使在临床技术人员安置不佳的情况下,完全屈曲硬停止件13的可调节性也允许该功能可用。在一个实施例中,完全屈曲硬停止件13是嵌入齿条连杆机构7a中的定位螺钉。可以调整定位螺钉13在齿条连杆机构7a内的位置以改变棘爪3a的脱离点。其他实施例对于可调节的完全屈曲硬停止件13是可能的并且也在本技术的范围内。
35.可以为伸展棘爪配合特征14提供类似的可调节性。在这方面,如果技术人员无意中将锚的位置朝向手背过度旋转,则指100将具有过度伸展的中间位置,而阻碍假体设备功能。可以调节伸展棘爪配合特征14,使得棘爪3a在完全伸展之前被强制配合,以防止指100返回到功能受损,过度伸展的中间位置。如上所述,在其他实施例中,齿条齿位于指100的不同连杆机构上,例如连杆机构8,9,10等,并且棘爪,硬停止件,和伸展棘爪配合特征可以被安置以与不同连杆机构上的齿条齿接合。
36.预计本技术的实施例提供优于传统设备的许多优点,其中包括:(1)更轻的重量;(2)将齿条和棘爪集成到力相对较低的近侧四杆配置;(3)完全屈曲棘爪脱离是可调节的,可在安装插口制作过程中出现放置不良时进行调节;(4)伸展棘爪配合是可调节的,可在安装插口制作过程中出现放置不良时允许调节;(5)棘爪挡块特征在高加载和偏转过程中配合,起到减少偏转和增加设备的承载能力的作用;以及(6)消耗性装饰盖的附接点包括美学特征和功能性抓持特征,以改进物体操纵。这些实施例也适用于动态肌腱驱动指。与传统的假体指技术相比,本技术还有望提供增强的应用鲁棒性,美观性,和可维护性。
37.图4a和4b显示了两段假体指200(“指200”)的正视图,其具有与指100的近侧四连杆机构类似的配置,包括锚1'和连杆机构2',6',7',和8',但消除了指100的连杆机构9和10。指200提供固定的远侧关节和仅一个四连杆机构,并且可以包括被配置为类似于指100的整流罩4a和5a功能的整流罩20'和21'。指200的一些部件类似于指100的那些,但对于指200用撇号(例如,2',3'等)标示。像图4a和4b中的指200的附图标记与图1-3c中的指100的附图标记不必解释为完全相同的部件,并且图4a和4b中的部件可以在形状,尺寸,功能等上与图1-3c中的那些有所不同。
38.参考图4b,伸展棘爪3a'配合特征是基件2'上的机械停止件18',其在伸展时撞击其桨叶底部上的棘爪3a'并迫使止动构件12b'与表面17b'配合。在另一个实施例中,如上所述,伸展棘爪配合特征是机械停止件14',其被安置于棘爪3a'的远端并且被配置成配合棘爪鼻部3b'或棘爪挡块15'的背表面以迫使止动构件12b'与表面17b'配合。在一些实施例中,伸展硬停止件14'是可调节的,例如通过使用可调节停止件19'。在其他实施例中,伸展棘爪配合特征可以具有不同的布置和/或包括不同的特征。可调节的完全屈曲硬停止件和可调节的伸展棘爪配合特征都可以减少齿条7b'上的齿的可用范围,从而为个人用户定制指100。
39.在一些实施例中,棘爪3a'可以在背侧具有桨叶部分,以允许用户手动脱离棘轮机制(棘爪鼻部3b'和齿条齿7b')。桨叶部分可以被放置在多种位置,并且仍然允许手动脱离棘轮锁。棘爪3a'的底部表面被配置为与可调节的完全屈曲硬停止件13'配合,使得在完全屈曲时棘爪3a'将被迫使进入脱离位置并且将经由通过扭转弹簧16'生成的弹簧力使结构返回完全伸展。棘爪鼻部的背表面设计有与可调节伸展配合特征14'接合的特征(例如棘爪挡块15'),以将棘爪3a'在完全伸展时返回配合位置。
40.本技术可以利用经由刚性连杆机构连接的两对或三对偏移旋转关节来生成耦合的四杆运动并模拟在自然解剖中看到的滑动髁运动,提供紧凑且逼真的运动空间。在上面参考图1a-3c所描述的指100的实施例中,段p1,p2,和p3代表手指的骨头并且代表mcp,pip,和dip关节之间的连接。在上面参考图4a和4b所描述的指200的实施例中,段p1和p2代表手指的骨头,并且其之间的连接仅代表mcp和pip关节,dip关节为固定的。其他配置也在本技术的范围内。
41.c.其他示例
42.以下示例说明了本技术的若干实施例:
43.1.一种假体指,包括:
44.锚,其被配置为与安装插口接合;
45.基座,可与所述锚耦合;
46.第一拉长连杆机构,其可相对于所述基座枢转,其中所述第一拉长连杆机构包括齿条齿;
47.第二拉长连杆机构,其可相对于所述基座以与所述第一拉长连杆机构重叠的配置枢转;和
48.棘爪,其被销接在所述第二拉长连杆机构上,所述棘爪具有远侧鼻部,其被配置成在所述棘爪的配合位置邻接所述齿条齿。
49.2.根据示例1所述的假体指,还包括棘爪挡块,其在所述配合位置从所述远侧鼻部伸展到所述第一连杆机构的一侧,其中所述棘爪挡块在所述假体指的加载偏转期间接触所述第一连杆机构。
50.3.根据示例1或2的假体指,其中:
51.所述第一和第二拉长连杆机构被可枢转地耦合到所述基座;
52.所述假体指还包括被可枢转地耦合到所述第一连杆机构的远端的第三连杆机构;
53.所述第三连杆机构包括一表面;和
54.所述棘爪被配置成邻接所述表面以使所述棘爪返回所述配合位置。
55.4.根据示例1-3中任一项所述的假体指,还包括:
56.第三连杆机构,其被可枢转地耦合到所述基座和所述第一连杆机构的近端;和
57.第四连杆机构,其被可枢转地耦合到所述基座和所述第二连杆机构的近端。
58.5.根据示例1-4中任一项所述的假体指,还包括偏置构件,其被配置成将所述第一和第二拉长连杆机构中的一个的远端朝向所述第一和第二拉长连杆中的另一个的远端旋转地推动。
59.6.根据示例1-5中任一项所述的假体指,其中,所述偏置构件被安置成将所述假体指朝向伸展位置推动,在所述棘爪的所述配合位置将所述远侧鼻部抵靠在所述齿条齿上。
60.7.根据示例1-6中任一项所述的假体指,其中,在所述棘爪的脱离位置,所述远侧鼻部与所述齿条齿间隔开,使得所述远侧鼻部在所述假体指的耦接期间不接触所述齿条齿。
61.8.根据示例1-7中任一项所述的假体指,还包括止动构件,其被配置成接触所述棘爪上的凹形脱离表面以将所述棘爪保持在所述脱离位置。
62.9.根据示例1-8中任一项所述的假体指,其中,所述棘爪包括凸形配合表面,并且所述止动构件被配置成接触所述配合表面以将所述棘爪保持在所述配合位置。
63.10.根据示例1-9中任一项所述的假体指,其中,所述脱离和配合表面由过渡峰隔开,该过渡峰被配置成将所述止动构件朝向所述脱离和配合表面之一推动,和/或其中所述脱离和配合表面的一个或多个表面具有基本上遵循欧拉曲线的曲率。
64.11.根据示例1-10中任一项所述的假体指,还包括被安置在所述第一拉长连杆机构中的可调节屈曲构件,所述可调节屈曲构件被配置成当所述假体指到达设定的最大屈曲位置时将所述棘爪旋转到所述脱离位置。
65.12.根据示例1-11中任一项所述的假体指,还包括可调节的伸展构件,其被配置为邻接表面以限制所述假体指在最大伸展位置处的所述旋转。
66.13.根据示例1-12中任一项所述的假体指,其中,所述可调节伸展构件被配置为将所述棘爪旋转到在所述最大伸展位置处的所述配合位置。
67.14.根据示例1-13中任一项所述的假体指,还包括用于消耗性整流罩的附接点。
68.15.一种具有棘轮锁的假体指,所述假体指包括:
69.基座,其被配置为与锚可释放地耦合;
70.第一拉长连杆机构,其包括多个齿条齿的,其中所述第一拉长连杆机构被可旋转地耦合到所述基座;
71.第二拉长连杆机构,以与所述第一拉长连杆机构重叠的配置被可旋转地耦合到所述基座;
72.第三拉长连杆机构,其被可旋转地销接到所述第一拉长连杆机构的远端和所述第二拉长连杆机构的远端;和
73.棘爪,其被销钉接在所述第二拉长连杆机构上,所述棘爪具有远侧鼻部,其被配置成在所述棘爪的配合位置邻接所述多个齿条齿中的每一个,
74.其中所述第一拉长连杆机构沿第一方向相对于所述基座的旋转导致所述第三拉长连杆机构沿相反的第二方向反向旋转,被定义为所述假体指的屈曲。
75.16.根据示例15所述的假体指,还包括在所述配合位置从所述远侧鼻部伸展到所述第一连杆机构的一侧的棘爪挡块,其中所述棘爪挡块在所述假体指偏转期间接触所述第一连杆机构。
76.17.根据示例15或16所述的假体指,还包括在所述第三连杆机构上的停止表面,其被配置成邻接所述棘爪以使所述棘爪返回所述配合位置。
77.18.根据示例15-17中任一项所述的假体指,还包括偏置构件,其被配置成将所述第一和第二拉长连杆机构中的一个的远端朝向所述第一和第二拉长连杆机构中的另一个的远端旋转地推动。
78.19.根据示例15-18中任一项所述的假体指,其中,所述偏置构件被安置成将所述假体指朝向伸展位置推动,在所述棘爪的所述配合位置将所述远侧鼻部抵靠在所述多个所述齿条齿中的一个上邻接。
79.20.根据示例15-19中任一项所述的假体指,其中,在所述棘爪的脱离位置,所述远侧鼻部与所述多个齿条齿间隔开,使得所述远侧鼻部在所述假体指的耦接期间不接触所述多个齿条齿。
80.21.根据示例15-20中任一项所述的假体指,还包括止动构件,其被配置成接触所述棘爪上的凹形脱离表面以将所述棘爪保持在所述脱离位置。
81.22.根据示例15-21中任一项所述的假体指,其中,所述棘爪包括凸形配合表面,并且所述止动构件被配置成接触所述配合表面以将所述棘爪保持在所述配合位置。
82.23.根据示例15-22中任一项所述的假体指,其中,所述脱离和配合表面由过渡峰隔开,该过渡峰被配置成将所述止动构件朝向所述脱离和配合表面之一推动,和/或其中所述脱离和配合表面的一个或多个具有基本上遵循欧拉曲线的曲率。
83.24.根据示例15-23中任一项所述的假体指,还包括被安置在所述第一拉长连杆机构中的可调节屈曲构件,所述可调节屈曲构件被配置成当所述假体指达到设定的最大屈曲位置时将所述棘爪旋转到所述脱离位置。
84.25.根据示例15-24中任一项所述的假体指,还包括可调节的伸展构件,其被配置为邻接表面以限制所述假体指在最大伸展位置处的所述旋转。
85.26.根据示例15-25中任一项所述的假体指,其中,所述可调节伸展构件被配置为将所述棘爪旋转到在所述最大伸展位置处的所述配合位置。
86.27.根据示例15-26中任一项所述的假体指,还包括用于消耗性整流罩的附接点。
87.d.结论
88.本技术的实施例的以上详细描述并非旨在穷举或将本技术限制为以上公开的精确形式。尽管以上出于说明性目的描述了本技术的具体实施例和示例,但是如相关领域的技术人员将认识到的,在本技术的范围内的多种等效修改是可能的。例如,虽然步骤以给定顺序呈现,但替代实施例可以以不同顺序执行步骤。此外,本文描述的多种实施例也可以被组合以提供进一步的实施例。本文提及“一个实施例”,“一实施例”,或类似的表述意味着结合实施例描述的特定特征,结构,操作,或特性可以被包括在本技术的至少一个实施例中。因此,本文中出现的此类短语或表述不一定都指同一实施例。
89.为了便于参考,在整个本公开中使用相同的附图标记来标识类似或相似的部件或特征,但是使用相同的附图标记并不意味着这些特征应该被解释为相同的。实际上,在本文描述的许多示例中,相同编号的特征具有在结构和/或功能上彼此不同的多个实施例。此外,相同的阴影可用于在横截面中表示成分类似的材料,但使用相同的阴影并不意味着材料应被解释为相同,除非本文特别指出。
90.此外,除非“或”一词被明确限制为仅表示在参考两个或多个项目的列表时与其他项目排除的单个项目,否则在这样的列表中使用“或”将被理解为包括(a)列表中的任何单个项目,(b)列表中的所有项目,或(c)列表中项目的任何组合。在情境允许的情况下,单数或复数术语也可以分别包括复数或单数术语。此外,术语“包括”自始至终用于表示至少包括所列举的特征,从而不排除任何更多数量的相同特征和/或其他类型的其他特征。诸如“上”,“下”,“前”,“后”,“垂直”,和“水平”之类的方向性术语可以在本文中用于表达和阐明多种元件之间的关系。应该理解,这些术语并不标示绝对方向。此外,虽然已经在那些实施例的情境中描述了与本技术的某些实施例相关联的优点,但其他实施例也可以展现出这样的优点,并且并非所有实施例都必须展现出这样的优点以落入本技术的范围内。因此,本公开和相关联的技术可以涵盖本文未明确显示或描述的其他实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1