带动态光束的平板光模块的制作方法
带动态光束的平板光模块
1.相关申请的交叉引用
2.本技术要求根据美国法典第35卷第119(e)条的优先权以及hallack等人于2019年10月15日提交的标题为带动态光束的平板光模块(flat panel light module with dynamic beam)的第62/915,253号美国临时申请和hallack等人于2020年1月3日提交的标题为带动态光束的平板光模块(flat panel light module with dynamic beam)的第62/956,843号美国临时申请的权益,所述美国临时申请的全部公开内容以引用的方式并入本文中。
技术领域
3.本公开大体上涉及照明系统,且更具体地涉及动态照明系统。
背景技术:
4.手术室和医疗间中提供的人工照明可能会在定位、阴影、光度、眩光和清洁方面出现一些问题。通常,由于人员和仪器在整个手术过程中的移位,医疗专业人员并不是静止的,并且照明需要是动态的。照明可在存在其它医疗设备的情况下从天花板悬置,所述医疗设备例如软管、显示器支架、吊杆、成像设备等。因此,用于手术间等的新照明系统可能是有利的。
技术实现要素:
5.根据本公开的一个方面,公开了一种照明系统。所述照明系统包含光组件。所述光组件包含外壳,所述外壳具有第一区和与所述第一区隔离的第二区。所述外壳被配置成与天花板大体上齐平地配合。可移动光源定位于所述第一区内且被配置成发射第一光。包含光条的静止光源定位于所述第二区内且被配置成发射第二光。
6.根据本公开的另一方面,公开了一种用于控制照明系统的方法。所述照明系统安置于外壳中,所述外壳被配置成配合在天花板的开口中且包括被配置成与所述天花板大体上齐平地对齐的照明表面。所述方法包含控制从光组件的中心部分发射的可移动光源的投影方向,以及控制来自围绕所述中心部分分布的静止光源的环境照明。所述静止光源与所述可移动光源的移动以机械方式断开连接。控制所述可移动光源包括控制多个行的光围绕第一轴线的第一旋转,所述第一旋转被配置成使所述多个行平行于所述照明表面旋转,以及控制所述多个行的光中的第一行围绕平行于所述照明表面的第二轴线的第二旋转。所述方法可进一步包括使所述多个行的光中的第二行的第三旋转结合所述第二旋转同步旋转。
7.根据本公开的又一方面,公开了一种光组件。所述光组件安置于外壳中。所述外壳被配置成配合在天花板的开口中且包括被配置成与所述天花板大体上齐平地对齐的照明表面。所述光组件包括第一光模块,其从所述外壳的框架居中地悬置。所述第一光模块包括形成多个行的光的第一多个光源,以及被配置成控制所述多个行的光围绕第一轴线的第一旋转的第一致动器。围绕所述第一轴线的所述旋转使所述多个行平行于所述照明表面旋
转。所述光组件进一步包括围绕所述第一光模块安置的第二光模块。所述第二光模块以固定方式连接到所述外壳,且通过所述照明表面发光。
8.在研究了下面的说明书、权利要求书和附图之后,本领域技术人员将理解和了解本公开的这些和其它方面、目标和特征。还将理解,本文公开的每个示例的特征可以结合其它示例的特征使用或作为后者的替代。
附图说明
9.以下是对附图中的图式的描述。附图不一定按比例绘制,并且出于清楚和简洁的目的,附图的某些特征和某些视图可以按比例放大或以示意图示出。
10.在附图中:
11.图1是包括照明系统的手术间的示意图;
12.图2a是根据本文中所描述的各种方面的光组件的顶部透视图;
13.图2b是图2a的光组件的顶部透视图;
14.图3是图2a的光组件的俯视图;
15.图4a是沿着图3的线iv-iv的横截面图;
16.图4b是根据本文中所描述的各种方面的图4a的光组件,示出了旋转的可移动光源;
17.图5是沿着图3的线v-v的横截面图;
18.图6是沿着图3的线vi-vi的横截面图;
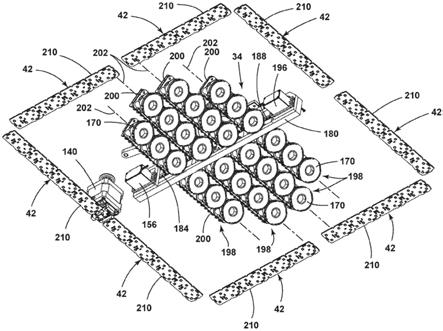
19.图7是根据本文中所描述的各种方面的在无外壳的情况下示出的光组件的底部透视局部组装图;
20.图8是图7的光组件的顶部透视局部组装图;
21.图9是根据本文中所描述的各种方面的光组件的底部透视局部组装图;
22.图10是移除了两个侧壁的图9的光组件的顶部透视局部组装图;
23.图11是图9的光组件的俯视图;
24.图12是沿着图11的线xii-xii的横截面图;
25.图13是根据本文中所描述的各种方面的在无外壳的情况下示出的光组件的底部透视图;
26.图14是根据本文中所描述的各种方面的在无外壳的情况下示出的可移动光源的顶部透视图;并且
27.图15是根据本文中所描述的各种方面的可移动光源的局部分解图。
具体实施方式
28.将在下面的详细描述中阐明本发明的其它特征和优点,且本领域的技术人员将从说明书中显而易见或者通过实践如以下描述中以及权利要求书和附图中所描述的本发明而认识到这些特征和优点。
29.如本文中所使用,在用于具有两个或更多个项目的列表中时,术语“和/或”意指所列项目中的任一个自身可以单独使用,或者可以使用所列项目中的两个或更多个的任何组合。举例来说,如果组合物被描述为含有组分a、b和/或c,那么所述组合物可含有:仅a;仅b;
仅c;a和b的组合;a和c的组合;b和c的组合;或a、b和c的组合。
30.在此文档中,例如,第一和第二、顶部和底部等关系术语仅用于区分一个实体或动作与另一个实体或动作,而不必需要或意指此类实体或动作之间的任何实际此类关系或次序。术语“包括(comprises、comprising)”或其任何其它变化形式意图涵盖非排他性的包含物,使得包括一系列要素的过程、方法、物品或设备并不仅仅包含那些要素,而是可以包含并未明确列出的或并非此类过程、方法、物品或设备固有的其它要素。在没有更多约束的情况下,前面是“包括
……”
的要素如无更多的限制则不排除在包括所述要素的过程、方法、物品或设备中存在另外的相同的要素。
31.大体上参考图1、2a和8,本公开提供了照明系统10。照明系统10可包含至少一个光组件14,其在此处被称为元件14和1014。尽管参考具体实例进行了论述,但应理解,可以各种组合实施光组件14和1014的各方面。如图2a所示,光组件14包含外壳18,所述外壳可包含第一区22和与第一区22以机械方式或结构上隔离的第二区26。外壳18被配置成与天花板30大体上齐平地配合。可移动光源34或第一光模块定位于第一区22内且被配置成发射第一光38。包含光条的静止光源42或第二光模块定位在第二区26内且被配置成发射第二光46。
32.现参考图1,照明系统10在医疗间50中进行描述且包含光组件14和/或光组件1014中的一个或多个。光组件14、1014可以采取各种配置。在一些实例中,光组件14、1014可以是模块化的、互连的,并且由吊顶天花龙骨组件(drop ceiling grid assembly)54支撑。以此方式,外壳18可以与天花板30大体上齐平地配合,其中外壳18在龙骨组件54上方突出。例如,光组件14、1014可以具有对应于天花板瓷砖58或由龙骨组件54形成的开口的形状的矩形形状。在具体实例中,光组件14、1014可包含吊顶天花板模块的标准尺寸,其可包含大约2英尺
×
2英尺(609.6mm
×
609.6mm)或大约2英尺
×
4英尺(609.6mm
×
1,219.2mm)。然而,光组件14、1014包含任何合适的形状,例如圆形、椭圆形、长方形、三角形、正方形和五边形或任何多边形形状,都在本公开的范围内。应理解,不同的光组件14、1014可以不同的形式提供,并且照明系统10可包含各种光组件14、1014。尽管结合医疗间50进行了描述,但应理解,本公开的照明系统10可以用于各种环境。例如,照明系统10可以用于汽车维修区域、医生办公室、牙科、摄影工作室、学校、办公大楼、制造场所、电影院、零售店、飞机,以及其中动态照明解决方案可能有利的其它区域。
33.照明系统10可包含一个或多个成像器62,所述成像器被描绘为辅助照明系统10的使用。成像器62中的每一者可被配置成在指向医疗间50中的视场64中捕获图像数据。在此配置中,成像器62可捕获图像数据,所述图像数据可由系统10处理以控制从系统10发射的光的发射方向、光强度、焦距、色温或色调和/或各种方面。成像器62可定位在光组件14、1014(例如,在外壳18中)、台66内或与它们联接,和/或在医疗间50周围。成像器62可以是电荷耦合装置(ccd)成像器、互补型金属氧化物半导体(cmos)成像器、其它类型的成像器和/或其组合。根据各种实例,成像器62可包含一个或多个透镜以准直和/或聚焦由患者、台66或医疗间50的其它特征反射的光。
34.台66可以至少部分地限定手术区70。出于本公开的目的,手术区70可以是术野,其可以是进行手术的隔离区域。手术区70可包含被无菌帘覆盖的器具和设备以及穿着卫生服的人员。台66被配置成在手术过程期间支撑患者。根据各种实例,台66可以具有正方形、矩形和/或椭圆形配置。台66可被配置成倾斜、旋转和/或升高或降低。在台66被配置成倾斜的
实例中,台66可以围绕台66的长轴线或短轴线倾斜约1
°
至约10
°
的角度。可以结合从照明系统10和/或光组件14、1014提供的照明来执行台66的倾斜。例如,台66可被配置成朝向和/或远离光组件14、1014倾斜以增加照明、减少照明和/或消除从患者和/或台66反射的眩光。另外,台66的倾斜在允许围绕台66定位的用户(例如,医务人员)更容易地接近患者和/或术野方面可能是有利的。除倾斜之外,应理解,台66可被配置成围绕x-y平面升高或降低、旋转和/或滑动。此外,医疗间50可包含可用于各种过程的一个或多个工具或仪器74以及用于查看信息的显示屏78。
35.在一些实施例中,成像器62可在视场64中捕获图像数据,所述图像数据标识医疗间50中和/或来自手术区70的相对照明(例如,阴影、反射、强度变化等)。成像器62可被配置成将图像数据中继到照明系统10的控制器82。控制器82可包含存储器和处理器。存储器可存储由处理器控制的计算机可执行命令(例如,例程)。根据各种实例,存储器可包含光控制例程和/或图像分析例程。图像分析例程被配置成处理来自一个或多个成像器62的图像数据。例如,图像分析例程可被配置成标识手术区70的阴影和光度、来自引导系统84的光、感兴趣点(例如,台66周围的用户)的位置和/或来自用户的手势。
36.如本文中所论述,引导系统84可对应于集成系统,所述集成系统包括并入作为系统10的组成部分的安置在外壳18内的成像器62。在此类实施方案中,光组件14和/或光组件1014中的每一者可对应于自包含的、模块化的装置,所述装置可组合使用以基于照明覆盖范围、强度、动态能力(例如,抵消阴影或照明变化的多个原点)等来缩放系统10。在一些情况下,可在与光组件14和/或光组件1014分离的组件中实施可包含成像器62中的一个或多个的引导系统84。在此类实例中,引导系统84的处理器或控制器可与控制器82通信并传送照明信息(例如,对应于医疗间50或手术区70的坐标的区的照明强度),使得照明组件14的一个或多个控制器82可根据协调的照明例程照亮医疗间50或手术区70。
37.根据各种实例,图像分析例程还可被配置成在图像数据中标识标记86或可穿戴装置88的位置,且响应于所述位置将一个或多个可移动光源34的位置调整到一个或多个目标位置90。在一些实例中,目标位置90可距光组件14、1014约3米。标记86可包含可由医疗间50中的人员抓持或穿着的手持式装置、可穿戴装置、衣物或手套的贴片或可识别部分。标记86可包含指示图像数据中感兴趣点的一个或多个符号、计算机可读代码和/或图案。可由系统10的控制器82通过检测控制仪器98的运动和/或运动速率来至少部分地确定对标记86的跟踪,所述控制仪器包括在视场64中标识的标记86,所述视场可包含手术区70,但不限于此。标记86可安置在仪器、医疗间50中的感兴趣点和/或患者中的一个或多个上。
38.一旦图像分析例程已处理来自成像器62的图像数据,光控制例程就可控制、移动、操纵、激活或以其它方式影响光组件14、1014以在标记86的位置处发光。此位置可对应于用户正注视或工作(例如,如从引导系统84测得的)的感兴趣区域。以此方式,光控制例程可操纵或以其它方式移动由一个或多个可移动光源34(图2)形成的第一光模块的部分以发射照明发射光,从而照亮用户94正注视和/或手和仪器所位于的各种区域。以此方式,可移动光源34可提供更多聚光中的一者。
39.替代地,用户94可向照明系统10提供控制输入,以控制、移动、操纵、激活、调整或以其它方式影响光组件14、1014在用户94期望的位置处发光。向照明系统10提供输入可包含利用用户界面或控制仪器,所述用户界面或控制仪器可被配置成将各种视觉提示传送到
系统10以控制各种设置和操作。此类设置可包含但不限于:控制灵敏度、光强度、光覆盖范围或焦点、光颜色、照明优先级、跟踪功能、定位光源34(图2)的平移和/或控制,以及照明系统10的各种可配置设置。
40.照明系统10可进一步包括可以与控制器82通信的一个或多个通信电路。通信电路可被配置成将数据和控制信息传送到显示器或用户界面(可包含移动装置),用于操作照明系统10。传送数据可包含手势、口头命令或用于将数据输入到通信电路的任何合适的方法。用户界面可包含一个或多个输入或操作元件,其被配置成控制照明系统10并传送数据。通信电路可进一步与不止一个光组件14、1014通信,所述不止一个光组件可作为光组件14、1014的阵列以组合方式操作。通信电路可被配置成经由各种通信协议或网络通信。
41.在一些实施方案中,控制器82可被配置成检测在于成像器62的视场64中捕获的图像数据中标识的一个或多个动作、手势和/或音频或视觉提示,以控制照明系统10。可由控制器82标识的示例性手势可包含旋转、横向运动、显示轮廓(例如,限定感兴趣区、照明周边等)和/或人物手势。响应于检测到每一手势,控制器82可选择性地控制照明系统10的一个或多个设置。如本文中所论述的,可与引导系统84的操作相协调地提供这种控制。对手势的检测可结合仪器98的移动,可由控制器82基于在于一个或多个视场64中捕获的图像数据中标识的标记86或符号的位置、定向和/或外形或存在而检测所述手势。控制器82可被配置成响应于检测到每一手势而增加照明范围或区的亮度、比例或大小,调整颜色或色温,和/或控制照明系统10的各种操作特性。
42.现参考图2a,照明系统10的光组件14可包含包括一个或多个可移动光源34的第一光模块以及包括静止光源42的第二光模块。在一些实例中,可移动光源34定位于第一区22内,并且静止光源42固定且定位于外壳18的第二区26内。此外,第一区22可位于外壳18的中心部分100处,并且可位于第二区26内,所述第二区靠近外壳18的周边104定位或以其它方式安置于中心部分100与外壳18之间。如图2a所述,第二区26可基本上环绕或包围第一区22。在这种情况下,静止光源42的基本性质可指静止光源的各个模块之间的间隔、间距或分布,所述静止光源可以不连续地环绕中心部分100且可以大体上围绕中心部分100分布。换句话说,静止光源42可分布在第二区26内,所述第二区安置于第一区22与外壳18的周边104之间。外壳18可包含外侧壁108以及使第一区22与第二区26分离的内侧壁112,并且可与由任何合适的材料(例如,金属或塑料)构成。外壳18中可包含任何合适数量的外侧壁108和内侧壁112。在一些实例中,外侧壁108和内侧壁112各自包含限定矩形形状的四个侧壁。在图2a中,在无第四外侧壁108的情况下示出外壳18,以便更清楚地展示光组件14的部件。
43.静止光源42可使用紧固件和/或粘合剂等安装到外壳18的底壁160的下侧。因此,在图2a中以虚线示出静止光源42,表示底壁160表面上与所示相对的位置。底壁160可安置于外侧壁108与内侧壁112之间。然而,静止光源42可以任何合适的配置定位于第二区26内。例如,静止光源42可以固定到外侧壁108和内侧壁112中的任一者。
44.第一光模块的可移动光源34可联接到定位于外壳18的上部部分124处的齿条120并从所述齿条悬置。齿条120可以呈通道126或结构框架的形式,其可以由被布置成支撑可移动光源34的杆、线、板、架等形成。在一些实例中,齿条120从一个外侧壁108延伸到相对的外侧壁108。在此配置中,齿条120可形成在相对侧壁108之间延伸的桥,并且可在所述相对侧壁之间延伸穿过内侧壁112。在此配置中,形成系统10的中心部分100的可移动光源34可
通过外壳18的相对侧壁108悬挂,使得与可移动光源34和对应齿轮、电动机或调整机构或组件相关联的重量可经由支撑外壳18的周边104的龙骨组件54得到支撑。
45.可移动光源34的调整机构可包含联接到齿条120的齿轮系统128。在示例性实施方案中,齿轮系统128安置于齿条120的通道126内且由所述通道支撑。齿轮系统128可被配置成移动或调整可移动光源34的定向,这可包含平移和倾斜。齿轮系统128可包含齿轮,例如联接到可移动光源34的带链轮132。带链轮132可被配置成旋转至少360
°
且至多540
°
,或基于齿轮系统128的齿轮比而根据需要进行旋转,以便使可移动光源34在调整范围内平移或转动。传感器外壳136可位于带链轮132附近,并且可包含被配置成确定旋转位置或起始位置用于校准带链轮132的磁铁和霍尔传感器。尽管示出为齿轮系统128,但经由任何合适的致动器控制可移动光源34的移动在本公开的范围内。
46.图2b更清楚地示出了齿轮系统128的部件。可以提供例如步进式电动机140的电动机以控制带链轮132的移动。在一些实例中,步进式电动机140联接到齿条120且安置于第二区26内。步进式电动机140可以与输入件联接,例如被配置成通过对链或带148的链齿施加拉力来致动带链轮132的旋转的驱动齿轮或滑轮144。滑轮144可包含比带链轮132更小的直径。然而,滑轮144和带链轮132的直径可包含用于传递所需旋转输出或力矩的任何合适比率。链或带148可以联接滑轮144和带链轮132以传递力矩。此外,可提供一个或多个导轮152。在一些实例中,导轮152可与传感器外壳136联接。任选地,齿轮系统128可包含伺服电动机156,所述伺服电动机被配置成控制可移动光源34的倾斜。伺服电动机156可以使可移动光源34能够倾斜大约+/-50
°
,这将参考图5更详细地论述。然而,步进式电动机140控制可移动光源34的倾斜在本公开的范围内。在此实例中,可移动光源34可以经由齿条和小齿轮配置联接到步进式电动机140。因此,响应于控制信号(例如,用户输入、引导系统控制信号84等),控制器82可以控制电动机140(156)以移动、操纵、倾斜或以其它方式调整可移动光源34的定向。本文中所描述的光源34、42中的任一者进行固定或单独地铰接在本公开的范围内。光源34、42可以全部是铰接的,可以一部分是铰接的,或者可以没有一个是铰接的。
47.另外,窗玻璃164可以安置于底壁160的外部,并且可以形成向外指向医疗间50中的可见表面。窗玻璃164可被配置成与天花板瓷砖58(图1)大体上齐平,使得天花板30可以具有平面配置。由于光组件14可以定位在与环境照明相同的地理空间中,因此可以减小从天花板30支撑或定位在所述天花板附近的设备的杂乱可能。此外,窗玻璃164可以提供可移动光源34和可从医疗间50的外部环境接近的静止光源42的易于清洁的隔板。
48.现参考图3,更清楚地展示了外壳18中的光组件14的第一区22和第二区26。第二光模块的静止光源42可以安装到底壁160,并且可以基本上环绕第一光模块的可移动光源34。然而,第一区22和第二区26包含任何合适的配置在本公开的范围内。例如,第一区22和第二区26可划分成外壳18的左侧和右侧。在另一实例中,第一区22和第二区26中的一者可形成外壳18的拐角,且第一区22和第二区26中的另一者可形成邻近拐角的l形状。
49.可移动光源34可被配置为光源阵列,例如发光二极管(led)光源阵列或led灯泡170阵列。在一些情况下,led灯泡170包含次级光学器件,其可以呈被配置成生成发射光的图案的次级透镜的形式。led灯泡170阵列可包含不止一个行,例如四行的多个led灯泡170。每一led灯泡170行可包含六个或八个led照明元件。然而,可移动光源34包含led灯泡170的任何合适配置或阵列在本公开的范围内,所述合适配置或阵列可包含多于或少于四个行,
以及每行有多于八个或少于六个led灯泡170。替代地,可移动光源34可包含单个光源,例如单个led光源。
50.图4a示出了光组件14沿着图3中的线iv-iv的透视横截面,以更清楚地示出窗玻璃164。如本文中所论述的,窗玻璃164可对应于各种形式的透光板,其被配置成将来自光源34、42的光传递到医疗间50中。在一些实例中,窗玻璃164包含覆盖外壳18的第一区22的第一窗玻璃168和覆盖第二区26的第二窗玻璃172。第一窗玻璃168和第二窗玻璃172可包含可以是基本透明的任何合适材料。在一个实例中,第一窗玻璃168和第二窗玻璃172中的一者或两者包含夹层安全玻璃。在另一实例中,第一窗玻璃168和第二窗玻璃172中的一者或两者包含电光元件,例如与至少一个基本透明基板联接的电致变色元件。电致变色元件被配置成响应于可从控制器82接收到的电信号而改变透射率。在各种实施方案中,可能有利的是在第一窗玻璃168和第二窗玻璃172中的一者或两者中包含电致变色元件,以便在不使用时隐藏静止光源42和可移动光源34中的一者或两者。
51.图4b示出了图4a的光组件,其中可移动光源34从图4a所示的位置旋转大约90
°
。如先前所论述的,带链轮132可被配置成旋转至少360
°
且至多540
°
或更大角度,以便平移或转动可移动光源34。另外,在本公开的范围内的是,控制器82控制电动机140(156)以横向或竖直地移动可移动光源34,以便使所发射的光对准所需路径。
52.另外,第一窗玻璃168和第二窗玻璃172中的一者或两者可被配置成允许第一旋向偏振光通过,同时消除第二旋向偏振光以最小化眩光。例如,第一窗玻璃168和第二窗玻璃172中的一者或两者可包含滤光器,其被配置成反射和/或吸收第二旋向偏振光。滤光器可包含一个或多个反射式偏光器和/或吸收式偏光器,在本文中可以统称为偏光器。反射式偏振器示例可包含线栅偏振器加上四分之一波片或光学延迟器、多层塑料膜,例如具有四分之一波片的双亮度增强膜(dbef)偏振器、光学延迟器和/或液晶材料。去除第二旋向偏振光可以减少和/或消除从手术部位感知的眩光,所述眩光可能会影响成像器62所捕获的图像数据。
53.图5示出了光组件14沿着图3中的线v-v的横截面,以更清楚地示出被配置成保持可移动光源34的臂180。臂180可以呈框架的形式,所述框架被配置成安装可移动光源34,并且以可操作方式联接从带链轮132悬置的可移动光源34,从而允许围绕带链轮132的第一旋转轴线186旋转/转动。与臂180联接的一个或多个链,例如第一链184和第二链188,可以与led灯泡170行中的一个或多个联接。第一链184和第二链188可以分别与第一伺服电动机156和第二伺服电动机196等电动机以可操作方式联接。以此方式,第一伺服电动机156和第二伺服电动机196可实现与第一链184和第二链188联接的可移动光源34的独立倾斜。另外,连接到第一链184和第二链188中的每一者的对应的led灯泡170行可被配置成分别响应于第一伺服电动机156和第二伺服电动机196的移动而以关联连接同步旋转或旋转。在一些实例中,第一伺服电动机156和第二伺服电动机196与臂180联接。然而,在本公开的范围内的是,对于例如步进式电动机140的单个电动机,控制可移动光源34的所有移动包含但不限于转动和倾斜。
54.所连接的led灯泡170行中的每一者示出为通过行支撑件198连接,所述行支撑件可对应于散热片200。行支撑件198布置led灯泡170,或更一般地说布置平行于第二旋转轴线202的光源组。在此配置中,行支撑件198和对应的光组或led灯泡170中的每一者垂直于
第一旋转轴线186且平行于透光板或基板延伸,所述透光板或基板形成覆盖第一区22的第一窗玻璃168。也就是说,行支撑件198中的每一者可被配置成围绕平行于第一窗玻璃168或天花板瓷砖58沿着其由龙骨组件54支撑的平面的轴线旋转。在此配置中,行支撑件198中的每一者从带链轮132悬置,使得行支撑件198围绕第一旋转轴线186一起旋转。另外,行支撑件中的每一者可以围绕平行于第二旋转轴线202且垂直于第一旋转轴线186的轴线旋转,如受伺服电动机156、196控制。在此配置中,光组件14提供经由新颖且经济的设备对每一led灯泡170进行多轴调整。
55.大体上参考图5-8,led灯泡170行可被称为第一行、第二行、第三行等,以便区分如所描绘的各个行。可以通过本文中所论述的组件经由对第一致动器的控制使可移动光源34围绕第一轴线旋转。类似地,可由伺服电动机156、196控制led灯泡170行围绕第二轴线的旋转,所述伺服电动机通常也可被称作一个或多个致动器(例如,旋转致动器、步进式电动机等)且由所述致动器实践。因此,每一致动器(例如,步进式电动机140、伺服电动机156和196等)的相关操作通常可参考以下操作在本文中进行讨论,包含致动器的用以控制围绕第一轴线186、第二轴线202和额外相关轴线(例如,第三行的led灯泡170的第三轴线、第四行的led灯泡170的第四轴线等)的旋转的独立或另外的相关操作,以大体上描述本文中所论述的具体描述示例性组件的相关操作。
56.现参考图6,示出了光组件14沿着图3中的线vi-vi的横截面。可移动光源34可经由板组件与臂180联接,所述板组件可呈散热片200的形式。可移动光源34可利用例如螺钉等紧固件固定到散热片200。另外,可以使用热胶带。散热片200可包含多个轮叶204以促进可移动光源34的散热。散热片200可包含具有足够热导率的任何合适材料,例如铝或铜,但不限于此。
57.图7示出了没有外壳18的光组件14,以便更清楚地展示一些部件,例如静止光源42。静止光源42可包含高显色指数(cri)led光条或阵列210。在静止光源42的led光条实例中,光条可包含表面安装装置(smd)、板上芯片(cob)装置、多cob(mcob)装置等。然而,静止光源42可以呈任何合适的形式,其可包含灯泡等。在一些实例中,静止光源42可以是可手动调整的。静止光源42可被配置成生成环境光性质。可移动光源34可包含具有模制全内反射(tir)透镜的高cri led。tir透镜可以将led光准直成有效、良好控制的光束。然而,可移动光源34可以呈任何合适的形式,其可包含光条等。在一些实例中,静止光源42和/或可移动光源34接线到具有带不同颜色或温度的光源组的数个不同电路中。可由控制器82调制静止光源42的串强度,以调整包含亮度、颜色或色温的特性,其可包含2700k、3000k、6000k、红色、橙色、绿色和蓝色等。
58.因此,可移动光源34和/或静止光源42可被配置成发射白光、彩色光(例如,约390nm至约700nm)、红外光(例如,约700nm至约1mm)和/或nir光(例如,约700nm至约940nm)或紫外光(例如,约10nm至400nm)。在各种实施例中,光源34、42可被配置成产生一个旋向的非偏振和/或偏振光,包含但不限于某些液晶显示器(lcd)、激光二极管、发光二极管(led)、白炽光源、气体放电灯(例如,氙、氖、汞)、卤素光源和/或有机发光二极管(oled)。在光源34、42的偏振光实例中,光源34、42被配置成发射第一旋向偏振光。根据各种实例,第一旋向偏振光可具有圆偏振和/或椭圆偏振。在电动力学中,圆偏振光是一种偏振状态,在所述状态下,在每个点处,光波的电场具有恒定量值,但其方向在垂直于所述波的方向的平面中以
稳定速率随时间旋转。
59.现参考图8,可移动光源34可被配置成发射第一光38,而静止光源42可被配置成发射第二光46。在一些实例中,第一光38对应于可由可选择性照明的led灯泡170生成的聚光。第二光46可对应于可由可选择性照明的led光条210生成的环境光。在静止光源42的静态或固定实例中,可以将光源42引导到聚焦于各种预定点上(例如,患者身上,和/或台66上)。在一些实例中,光组件14可包含被配置成定向地移动第二光46的反射器和/或漫射器。
60.现参考图9,照明系统10可包含至少一个光组件1014。光组件1014类似于光组件14。因此,除非另外标识,否则将用增大1000的数字来标识类似部件。因此,除非另外说明,否则关于光组件14的描述适用于光组件1014。
61.光组件1014可包含窗玻璃1164(图10)。任选地,光组件1014包含覆盖第一区1022的第一窗玻璃1168和覆盖第二区1026的第二窗玻璃1172,所述第二区位于周边1104附近或形成外壳1018的周边区。如先前所论述的,光组件1014可包含被配置成定向移动从静止光源1042发射的光的反射器和/或漫射器。反射器和/或漫射器可与窗玻璃1164以可操作方式联接。另外,偏振光层可以与窗玻璃1168联接。
62.如图所示,外壳1018的第一区1022可包含限定孔口1171的关闭板1169,所述孔口被配置成聚焦从第一光模块的可移动光源1034发射的光。孔口1171可以呈圆形、椭圆形、正方形、菱形等形式。说明性关闭板1169联接到外壳1018的内侧壁1112,所述内侧壁延伸穿过底壁1160。如图9所示,内侧壁1112可以利用托架1161联接到底壁1160,但不限于此。在一些实例中,关闭板1169包含黑色阳极化材料。
63.现参考图10,在无内侧壁1112和外侧壁1108中的一者的情况下示出了光组件1014,以更清楚地展示可移动光源1034。如先前所论述的,可移动光源1034的臂1180呈框架形式,所述框架被配置成安装可移动光源1034且将可移动光源1034以可操作方式联接到带链轮1132以用于旋转/转动。在说明性实例中,臂1180呈倾斜托架1182的形式,所述倾斜托架被配置成与led灯泡1170行以可操作方式联接。将关于图15更详细地论述将led灯泡1170行安装到倾斜托架1182。
64.类似于光组件14,组件1014包括传感器外壳1136,所述传感器外壳可位于带链轮1132附近,并且可包含被配置成确定旋转位置或起始位置用于校准带链轮1132和附接的可移动光源1034的磁铁和霍尔传感器。在此配置中,可以提供电动机或致动器,例如步进式电动机1140,以围绕第一轴线186(图5和图6)定位或定向可移动光源1034。步进式电动机1140可以与输入件联接,例如驱动齿轮或滑轮1144。链或带1148可以联接滑轮1144和带链轮1132以传递力矩。另外,可提供一个或多个导轮1152。在一些实例中,导轮1152可与传感器外壳1136联接。尽管示出为齿轮系统1128,但经由任何合适的致动器控制可移动光源1034的移动在本公开的范围内。
65.仍参考图10,说明性光组件1014包含数字多路输入/输出系统1250和联接到外侧壁1108的电插头1254。因此,用户可易于将电力和数字信号提供到光组件1014。然而,数字多路输入/输出系统1250和电插头1254可以安置于任何合适的位置处,包含内侧壁1112。另外,齿条1120可包含被配置成收纳手柄的端部的多个安装特征1258。因此,当手柄联接到安装特征1258时,用户可易于将光组件1014从存储装置升起。
66.现参考图11,说明性倾斜托架1182包含通过横向区段1185互连的多个平行的行
1183。行1183的数量可对应于led灯泡1170行的数量。在一些实例中,行1183的长度对应于led灯泡1170行的长度。以此方式,倾斜托架1182可限定对应于led灯泡1170阵列的形状。例如,光组件1014可包含六个led灯泡1170行,其中两个中间的led灯泡1170行最长且其余的led灯泡1170行的长度逐渐减小。因此,倾斜托架1182可包含最长的两个中间的行1183和长度逐渐减小的其余行1183。
67.图12示出了光组件1014沿着图11中的线xii-xii的横截面,以更清楚地示出了安装到倾斜托架1182的led灯泡1170行。在一些方面中,独立地控制每一led灯泡1170行,使得每一led灯泡1170行可以彼此独立地倾斜或旋转。由联接到led灯泡1170行的端部的伺服电动机1300(图15)单独地控制第一光模块的说明性可移动光源1034中的led灯泡1170行。如先前所论述发,所述led灯泡1170行可由呈散热片1200形式的行支撑件支撑。散热片1200可包含轮叶1204以促进可移动光源1034的散热。散热片1200可包含具有足够热导率的任何合适材料,例如铝或铜,但不限于此。
68.伺服电动机1300关于图15更清楚地示出,并且可联接到led灯泡1170行的任一端部。在一些方面中,三个led灯泡1170行包含在第一端部1170a上的伺服联接件1260,三个led灯泡1170行包含在相对的第二端部1170b(图13)上的伺服联接件1260。第二端部1170b(即,图12所描绘的光组件1014的右侧)上的伺服联接件1260隐藏在led灯泡行以及对应支撑组件或行支撑件之后,如本文中先前所论述的。
69.仍参考图12,说明性伺服联接件1260包含伺服托架1264、伺服臂1268和伺服连杆1272。伺服电动机1300联接到伺服托架1264,所述伺服托架也可以可旋转方式联接到led灯泡1170行的第一端部1170a。伺服托架1264可从倾斜托架1182悬挂下来。伺服臂1268将伺服托架1264联接到伺服连杆1272。伺服连杆1272以可旋转方式联接到led灯泡1170行的第一端部1170a。
70.如图所示,在相对的第二端部1170b(图13)上具有伺服联接件1260的led灯泡1170行在第一端部1170a上包含悬垂托架1276。悬垂托架1276可从倾斜托架1182悬挂下来,并且与led灯泡1170行的第一端部1170a以可旋转方式联接。如先前参考图5、6和9所论述的,悬垂托架1276支撑led灯泡1170行,同时允许围绕第二旋转轴线202的倾斜移动。因此,照明组件14和1014中的每一者被配置成提供围绕第一旋转轴线186和第二旋转轴线202的多轴旋转,如本文中先前所论述的。
71.图13展示了没有外壳1018的光组件1014以清楚地展示一些部件,例如第二光模块的静止光源1042。如先前所论述的,静止光源1042可包含高显色指数(cri)led光条或阵列1210。在静止光源1042的led光条实例中,光条可包含表面安装装置(smd)、板上芯片(cob)装置、多cob(mcob)装置等。另外,led灯泡1170行的第一端部1170a和相对的第二端部1170b可能看起来更清楚。此外,led灯泡1170可包含次级光学器件,其可以呈被配置成生成发射光的图案的次级透镜的形式。
72.现参考图14,在无光组件1014的其它部件的情况下示出了可移动光源1034。说明性倾斜托架1182包含与行1183互连的中间环形部分1280。环形部分1280可以与带链轮1132(图11)以可操作方式联接。因此,带链轮1132可以驱动倾斜托架1182的平移或旋转。带链轮1132可利用任何合适的技术与倾斜托架1182联接,包含紧固件等。
73.另外,可移动光源1034可包含安置于倾斜托架1182与led灯泡1170之间的电气板
1290,其被配置成与led灯泡1170以电气方式联接。说明性电气板1290呈包含多个跳线引脚(jumper pin)1294的印刷电路板的形式。跳线引脚1294可联接到电源以向led灯泡1170提供电力。
74.图15是可移动光源1034的局部分解图,其更清楚地示出了伺服联接件1260和伺服电动机1300。在一些方面中,枢轴销1304联接到led灯泡1170行的端部1170a和1170b。枢轴销1304与端盖1308以可操作方式联接,所述端盖限定用于收纳枢轴销1304的孔口。枢轴衬套1312可安置于用于收纳枢轴销1304的孔口内,从而以可旋转方式联接延伸穿过端盖1308的枢轴销1304和伺服托架1264。此外,说明性伺服电动机1300包含被配置成延伸穿过由伺服托架1264限定的另一孔口的凸台1316。伺服臂1268的一个端部以可操作方式联接到凸台1316,使得伺服托架1264安置于伺服臂1268与伺服电动机1300之间。伺服臂1268的另一端部联接到伺服连杆1272。包含在伺服联接件1260中的端盖1308可另外包含被配置成与由伺服连杆1272限定的孔口联接的突出部1320。伺服连杆1272可利用任何合适的紧固件(例如,带肩螺栓1324)联接到突出部1320。伺服电动机1300驱动伺服臂1268的旋转,所述旋转转换为伺服连杆1272的移动和led灯泡1170行的倾斜。
75.仍参考图15,led灯泡1170行的与具有伺服联接件1260的端部相对的端部包含悬垂托架1276。悬垂托架1276可限定被配置成收纳枢轴销1304的孔口。因此,端盖1308安置于悬垂托架1276与枢轴销1304之间。悬垂托架1276可利用任何合适的紧固件(例如,带肩螺栓1324)联接到枢轴销1304。
76.如可从本文中所提供的描述理解的,悬垂托架1276和伺服联接件1260提供铰链机构以支撑和提供led灯泡1170行的倾斜移动。此外,可由控制器82控制的伺服电动机1300提供对每一led灯泡1170行的独立控制。
77.光源34、42、1034、1042以及齿轮系统128、1128中的每一者可与控制器82通信。控制器82可被配置成控制第一光38的方向。光组件14的这种操纵可以使得控制器82能够响应于预定的所需位置而引导可移动光源34选择性地照亮手术区70或医疗间50的各个部分。在一些实施方案中,控制器82可以选择性地使led灯泡170、1170照明,以使第一光38的光束变窄/变宽。控制器82可被配置成选择性地使单独的灯泡170、1170或光条210、1210照明和控制所述单独的灯泡或光条。
78.控制器82可控制光组件14、1014的电动机,以引导第一光38的照明发射光瞄准医疗间50中的所需位置。中间或单个控制器82可以控制包含在照明系统10中的光组件14、1014中的每一者。替代地或另外,光组件14、1014可与不止一个控制器82以电气方式连通,所述控制器可包含板上控制器82。在特定实施方案中,控制器82可扫描来自成像器62中的每一者的图像数据,并且调整可移动光源34、1034中的每一者的定向以动态地控制医疗间50中的光。尽管成像器62被论述为并入在光组件14、1014中的每一者上,但照明系统10可被配置成捕获来自医疗间50中的任何位置的图像数据。在此类实施例中,中央控制器82可被配置成处理来自一个或多个成像器62的图像数据,并且传送用于多个光组件14、1014中的每一者的控制信号。任选地,控制器82可响应于用户输入而调整可移动光源34、1034的定向。
79.在来自传感器或手动输入的信号之后,控制器82可控制形成第一光模块的可移动光源34、1034和形成第二光模块的静止光源42、1042,以选择性地以预定强度或所需颜色
(例如,红色)进行照明。以此方式,光组件14可有益于用信号表示紧急情况。中央控制器82可被配置成控制多个光组件14、1014协同工作。例如,控制器82可以依序使多个光组件14、1014中的光源34、42、1034、1042中的一者或两者照明以指示移动方向,所述移动方向可包含朝向出口标志。
80.根据本公开的一个方面,一种照明系统包含光组件。所述光组件包含外壳,所述外壳具有第一区和与所述第一区隔离的第二区。所述外壳被配置成与天花板大体上齐平地配合。可移动光源定位于所述第一区内且被配置成发射第一光。静止光源定位于所述第二区内且被配置成发射第二光。
81.根据另一方面,所述第一区位于所述外壳的中心处且所述第二区环绕所述第一区。
82.根据再一方面,所述外壳进一步包括在其上部部分的齿条,并且所述可移动光源经由安置于所述第一区内的齿轮系统联接到所述齿条。
83.根据又一方面,所述可移动光源包括联接到臂的led光源阵列,且所述臂联接到被配置成旋转至少360
°
的带链轮组件。
84.根据另一方面,所述带链轮组件被配置成旋转至少540
°
。
85.根据又一方面,所述led光源阵列包含红光、橙光、黄光、绿光、蓝光、红外光和紫外光中的至少一个。
86.根据再一方面,至少一个图像传感器被配置成在视场中收集图像数据,其中控制器基于所述图像数据而调整所述第一光的定向。
87.根据另一方面,至少一个图像传感器被配置成在视场中标识标记和可穿戴装置中的至少一个的位置。
88.根据另一方面,窗玻璃定位于所述外壳的底部表面上,其中所述窗玻璃包括夹层安全玻璃和电致变色元件中的至少一个。
89.根据另一方面,所述可移动光源包含倾斜托架,led光源行,以及被配置成将所述led光源行联接到所述倾斜托架的伺服联接件。
90.根据另一方面,所述可移动光源包括led光源行,且所述led光源行被独立地控制以进行倾斜移动。
91.本公开进一步提供一种用于控制安置于外壳中的照明系统的方法,所述外壳被配置成配合在天花板的开口中且包括被配置成与所述天花板大体上齐平地对齐的照明表面。所述方法包含控制从光组件的中心部分发射的可移动光源的投影方向,以及控制来自围绕所述中心部分分布的静止光源的环境照明。所述静止光源与所述可移动光源的移动以机械方式断开连接。控制所述可移动光源包括控制多个行的光围绕第一轴线的第一旋转,所述第一旋转被配置成使所述多个行平行于所述照明表面旋转,以及控制所述多个行的光中的第一行围绕平行于所述照明表面的第二轴线的第二旋转。
92.根据一些方面,所述方法进一步包括使所述多个行的光中的第二行的第三旋转结合所述第二旋转同步旋转。
93.在一些方面中,本公开提供一种安置于外壳中的光组件。所述外壳被配置成配合在天花板的开口中且包括被配置成与所述天花板大体上齐平地对齐的照明表面。所述光组件包括第一光模块,其从所述外壳的框架居中地悬置。所述第一光模块包括形成多个行的
光的第一多个光源,以及被配置成控制所述多个行的光围绕第一轴线的第一旋转的第一致动器。围绕所述第一轴线的所述旋转使所述多个行平行于所述照明表面旋转。所述光组件进一步包括围绕所述第一光模块安置的第二光模块。所述第二光模块以固定方式连接到所述外壳,且通过所述照明表面发光。
94.在一些方面中,所述第一光模块进一步包括关于所述多个行的光中的第一行的第二致动器。所述第二致动器被配置成使所述第一行围绕平行于所述照明表面的第二轴线旋转。在一些情况下,所述第二致动器可进一步控制围绕所述第二轴线的第二旋转,所述第二旋转与受所述第一致动器控制的所述第一旋转无关。所述第二轴线还可垂直于所述第一轴线。
95.在一些方面中,所述多个行的光可进一步包括第二行,其连接到所述第一行且被配置成响应于所述第二致动器而与所述第一行同步旋转。所述第二行可沿着平行于所述第二轴线的第三轴线延伸。
96.在另一方面中,所述第一光模块可进一步包括关于所述多个行的光中的第二行的第三致动器。所述第三致动器被配置成使所述第一、第二行围绕平行于所述第二轴线的第三轴线旋转,并且控制所述第二行的第三旋转,所述第三旋转与所述第一行受所述第二致动器控制的第二旋转无关。
97.本领域一般技术人员应理解,所描述的公开内容和其它部件的构造不限于任何具体材料。除非在本文中另外描述,否则本文中所公开的公开内容的其它示例性实施例可以由多种材料形成。
98.出于本公开的目的,术语“联接(coupled)”(以其所有形式:couple、coupling、coupled等)通常意味着两个(电的或机械的)部件彼此直接或间接接合。此类接合在本质上可以是静止的或在本质上可移动的。此类接合可使用两个(电气或机械)部件和彼此或与两个部件一体地形成为单个整体的任何额外的中间构件实现。除非另外说明,否则此类接合本质上可以是永久性的,或本质上可移除或可释放。
99.还值得注意的是,如在示例性实施例中示出的本公开的元件的构造和布置仅仅是说明性的。尽管已在本公开中详细地描述了本创新的仅仅几个实施例,但查阅本公开的所属领域的技术人员将容易了解,在不实质性地脱离所述主题的新颖教示和优点的情况下,可能有许多修改(例如,各种元件的大小、尺寸、结构、形状和比例、参数值、安装布置、材料的使用、色彩、定向等的变化)。例如,示出为一体地形成的元件可以由多个部分构造而成,或示出为多个部分的元件可以一体地形成,可以颠倒或以其它方式改变界面的操作,可以改变结构的长度或宽度和/或系统10的构件或连接器或其它元件,可以改变在元件之间提供的调整位置的性质或数字。应注意,系统10的元件和/或组件可以由提供足够强度或耐久性的广泛多种材料中的任一种构成,并且可以呈各种各样的颜色、纹理和组合中的任一个。因此,所有这些修改预期包含在本发明创新的范围内。可以在不脱离本创新的精神的情况下在所要和其它示范性实施例的设计、操作条件和布置方面进行其它替代、修改、改变和省略。
100.应理解,任何所描述的过程或所描述过程内的步骤可以与公开的其它过程或步骤组合以形成在本公开的范围内的结构。本文所公开的示范性结构和工艺是出于说明性目的,而不应被解释为限制性的。
101.还应理解,在不脱离本公开的概念的情况下,可以对上述结构和方法做出变化和修改,且另外应理解,此类概念预期由以下权利要求涵盖,除非这些权利要求的措辞明确说明并非如此。此外,下文所阐述的权利要求书并入到此具体实施方式中并且构成此具体实施方式的部分。
102.如本文所使用的术语“约”意指量、尺寸、配方、参数和其它数量和特征不是准确的且无需为准确的,但可以是近似的和/或按需要更大或更小,反映公差、换算系数、舍入、测量误差等和本领域的技术人员已知的其它因素。当使用术语“约”描述范围的值或端点时,本公开应理解为包含提及的具体值或端点。无论说明书中的范围的数值或端点是否引用“约”,范围的数值或端点预期包含两个实施例:一个由“约”修饰,一个不由“约”修饰。将进一步理解,无论与另一个端点相关还是与另一个端点不相关,每一个范围的端点都是有意义的。本文使用的术语“基本上(substantial/substantially)”以及其变型预期指示所描述特征等于或大致等于值或描述。
103.本领域的技术人员以及制作或使用本公开的技术人员将想到对本公开的修改。因此,应理解,在附图中示出且在上文描述的实施例仅用于说明的目的,且并非旨在限制本公开的范围,本公开的范围由根据包含等同原则的专利法的原理解释的所附权利要求定义。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1