内窥镜控制装置的制作方法
内窥镜控制装置
1.相关申请的交叉引用
2.本技术要求2019年10月14日提交的第62/914,689号美国临时专利申请的优先权权益,所述申请的内容以引用的方式并入本文中。
技术领域
3.本公开大体上涉及腔内装置领域,更具体地说涉及内窥镜检查领域。本文中描述内窥镜控制装置。
背景技术:
4.内窥镜检查使用插入到身体开口(例如,口腔、肛门等)中或穿过切口的细柔性管以研究组织、执行活检和/或提供疗法或治疗。通常,使用内窥镜研究和/或治疗器官系统,例如胃肠道、呼吸道、泌尿道和女性生殖道。内窥镜在各种类型的腹腔镜手术中也很常见,其中内窥镜以微创方式插入所关注组织附近的切口中。取决于待研究的组织和/或待执行的治疗,内窥镜可在远端上或经由穿过内窥镜内腔的通路装备有不同功能性阵列:电灼工具、相机、灯、冲洗剂、空气、超声探测器、切除工具(例如,针)等。图1示出典型内窥镜100的实例。如可在图1中看出,典型内窥镜的功能性非常广泛,且进一步包含用于铰接内窥镜远端的铰接旋钮。
5.在内窥镜检查手术期间,医生必须几乎同时或快速连续地执行若干任务。例如,在内窥镜检查手术期间,需要在不损害内窥镜或不对患者造成伤害的情况下以平移和旋转方式稳定、操纵和/或控制内窥镜。另外,医生需要调制和控制来自阀140的空气/水流;来自阀110的抽吸;成像模式,如相机120;来自通道130的治疗模式;等,并通常使用用于左右铰接的旋钮160铰接内窥镜100的远端150,如图1中所示。医生执行的大量任务可能会导致医生感到疲劳和不适,并最终损害医生上半身的肌腱和肌肉。此外,需要至少一名额外助理来完全执行内窥镜手术
‑‑
在部署内窥镜的各种功能性时固持内窥镜,或操作内窥镜或与内窥镜电气通信的计算系统,从而增大了医院的开销。
6.因此,需要在内窥镜检查手术期间使用的执行至少一些上述任务的装置。存在各种腹腔镜辅助工具,但其无法满足内窥镜检查的独特要求。此外,存在在内窥镜手术期间系栓或粘附到患者的装置。然而,由于内窥镜在内窥镜检查手术期间的平移和旋转要求,这些装置可能会使患者感到不适。机器人系统也可用于某些手术应用,但其对于某些内窥镜检查手术可能过于繁琐。总之,需要用于内窥镜控制的新装置。
附图说明
7.前文是概述,且因此,必然在细节上有所限制。下文结合各种实施例,参考附图描述本发明技术的上文所提及方面以及其它方面、特征和优点。
8.图1说明典型内窥镜。
9.图2a说明接近患者的内窥镜控制装置的一个实施例。
10.图2b说明内窥镜控制装置的一个实施例,其进一步包括在装置的至少一部分上的手术盖布。
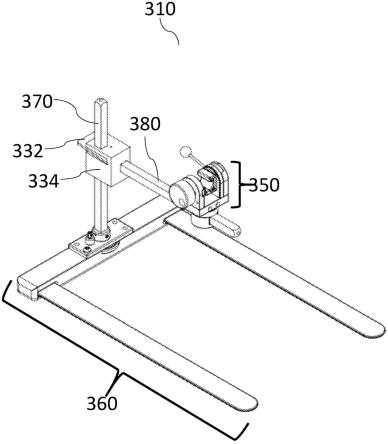
11.图3说明图2a的内窥镜控制装置的透视图。
12.图4说明图2a的内窥镜控制装置的侧视图。
13.图5a说明内窥镜控制装置的夹钳的一个实施例的侧视图,所述夹钳处于打开的未夹持配置。
14.图5b说明图5a的夹钳的侧视图,其处于闭合的夹持配置。
15.图6说明图5a的夹钳的分解图。
16.图7说明内窥镜控制装置的底座和柱的透视图。
17.图8说明图7的底座和柱的分解图。
18.图9说明内窥镜控制装置的可调整块的一个实施例的分解图。
19.图10a到10b分别说明处于打开和闭合配置的内窥镜控制装置的夹钳的另一实施例。
20.图11a到11b分别说明处于打开和闭合配置的内窥镜控制装置的夹钳的另一实施例。
21.图12a到12b分别说明处于打开和闭合配置的内窥镜控制装置的夹钳的另一实施例。
22.图13说明使用内窥镜控制装置的方法的一个实施例的流程图。
23.所说明实施例仅为实例且不意图限制本公开。绘制示意图用于说明特征和概念且其未必按比例绘制。
具体实施方式
24.前文是概述,且因此,必然在细节上有所限制。现将结合各种实施例描述上文所提及方面以及本发明技术的其它方面、特征和优势。以下实施例的包含未意图将本公开限于这些实施例,而是相反,允许所属领域的技术人员进行和使用设想的发明。在不脱离本文呈现的主题的精神或范围的情况下,可利用其它实施例,且可作出修改。如本文中所描述和说明的本公开的方面可以多种不同构想形式被布置、组合、修改以及设计,其全部是明确设想的且形成本公开的部分。
25.本文中所描述的装置被配置成与任何细长装置:内窥镜、导管、探测器等一起使用。细长装置或内窥镜的示例性非限制性实施例包含:胃镜、十二指肠镜、结肠镜、乙状结肠镜、肠镜、支气管镜、输尿管镜、膀胱镜、鼻喉镜、腹腔-胸腔镜、移动气道镜、胆道镜等。
26.本文中所描述的装置可被配置成用于广泛多种内窥镜大小;例如外径为9到11.4mm、10.8到12.5mm、12.9到13.7mm、21.8到13.2mm、10.5到11.7mm、5.7到6mm、2.8到13.2mm、10.5到11.7mm、5.7到6mm、2.8到3.3mm、5.4到5.5mm、2.6到4.9mm、7mm、4.1到5.2mm、2.8到5.2mm、5.9到6mm、11.5到11.6mm、4.4到5.1mm或其间的任何范围或子范围的细长装置。
27.本文中公开内窥镜控制装置210。如图2a到2b中所示,一般来说,此类装置包含可接近患者230定位(例如,在床、地板、桌子、立件等上)的底座、从底座竖直地延伸的柱、从柱水平地延伸的臂,以及可移动或固定地联接到臂的夹钳。此类装置用以将内窥镜定位成接
近或接触患者230。内窥镜控制装置210的底座可定位在手术或医院病床或平台上的床垫220下,使得患者和/或床垫的重量进一步使内窥镜控制装置210稳定。在其它实施例中,内窥镜控制装置210可定位在地板上且包括两个或更多个支腿(例如,三角架、梯子配置等)或一个或多个轮子。例如,内窥镜控制装置210可在一个或多个轮子上的位置之间移动。内窥镜控制装置210可被配置成被拆卸且存储和/或输送到第二位置。例如,底座的一个或多个支腿可以是可移除的,柱可与臂和/或底座分离,和/或夹钳可与臂分离。本文中所描述的内窥镜控制装置210的一个或多个组件可以是一次性的。本文中所描述的内窥镜控制装置210的一个或多个组件被配置成用于与手术盖布240一起使用,如图2b中所示,以将一个或多个组件保持在手术区域之外且不受污染。手术盖布240可被配置成大体上覆盖内窥镜控制装置210的夹钳、臂、柱和/或底座。
28.此外,本文中所描述的内窥镜控制装置210被配置成:用第一较小力抓握内窥镜,使得内窥镜保持可轴向且可旋转平移;用中间力抓握内窥镜,使得内窥镜可轴向或可旋转平移;或用最大力抓握内窥镜,使得内窥镜既不可轴向也不可旋转平移。当然,存在在其间限制轴向和旋转平移的力的度数,使得可能存在影响定位在其中的内窥镜装置的轴向和/或旋转移动的无数个度数的力。中间配置还被进一步配置成将夹钳的夹持力从未夹持(即,不对内窥镜施加力)调制为完全夹持(即,内窥镜的旋转和平移完全受限)。
29.如图3到4和7到8中所示,用于可逆地约束内窥镜的装置包含可接近患者定位的底座360、460、760、860。底座360、460、760、860用以在结构上支撑内窥镜控制装置310、410的柱370、470、770、870和臂380、480。底座360、460、760、860进一步用以搁置或定位在接近患者的表面,例如地板、床、柜台或其它表面上。例如,底座可定位成使得内窥镜控制装置310、410的夹钳350、450在患者的身体开口或切口的1到10mm、0.5到5cm、1到10cm或其间的任何范围或子范围内。在一个非限制性实施例中,如图7到8中所示,底座760(860)包含支腿762a、762b(862a、862b)和主体764(864)。支腿762a、762b(862a、862b)可例如插入在床垫下和/或搁置于表面上以支撑内窥镜控制装置310、410。支腿762a、762b(862a、862b)可包括轻量材料,例如铝、钛或镁。支腿762a、762b(862a、862b)可大体上是平坦的、圆柱形的或呈其它形式。如图8中所示,支腿862a、862b可以可逆地插入到由主体864界定的支腿收纳区域852a、852b中。一旦定位于支腿收纳区域852a、852b中,支腿862a、862b就经由一个或多个紧固件(例如,平头螺钉)紧固到主体864。替代地,支腿862a、862b和主体864形成单片支撑结构,使得支腿862a、862b和主体864不可逆地连接或加工或制造为一个组件。
30.如图4中所示,内窥镜控制装置410进一步包含从底座460,更具体地说从如图8中所示的主体864竖直地延伸的柱470。如图4中所示,柱470在y方向上从xz平面中的底座460竖直地延伸。柱470进一步可枢转地联接到底座460,更具体地说联接到主体464,使得柱470、870围绕y轴872旋转,如图8中所示。主体864界定孔隙838,其大小设定且塑形成穿过板842收纳柱870的连接器部分836。套筒轴承848收纳于孔隙838中以防止连接器部分836在旋转期间在主体864上摩擦。板842界定被配置成收纳旋转凸缘844的突出部分的孔隙832。旋转凸缘844上的螺钉854被配置成将柱870(例如,以平移和/或旋转方式)紧固在旋转凸缘844中。连接器部分836进一步包括被配置成接触螺钉854且在柱870上提供扭转力的支座856。旋转凸缘844中包含多个棘爪,使得销846在被操纵(例如,提升、升高、移动等)时允许旋转凸缘844旋转,借此引起柱870中的旋转872。释放销846允许销846插入在旋转凸缘844
中的多个棘爪中的一个中,此防止旋转凸缘844的进一步旋转,借此防止柱870的旋转。在一些实施例中,棘爪相对于另一棘爪以5
°
、10
°
、15
°
或20
°
的增量定位。在其它实施例中,棘爪可以0到25
°
的增量、25到50
°
的增量、50到75
°
的增量、75到100
°
的增量、100到125
°
的增量、125到150
°
的增量、150到175
°
的增量、175到200
°
的增量、200到225
°
的增量、225到250
°
的增量、250到275
°
的增量、270到300
°
的增量、300到325
°
的增量、325到350
°
的增量或其间的任何范围或子范围定位。柱870相对于主体864枢转或旋转(箭头872),使得底座860可垂直于患者或底座860所搁置的表面定位,且柱870可相对于患者枢转以将夹钳定位成接近患者的身体开口或切口。
31.返回到图4,内窥镜控制装置410进一步包含从柱470在xz平面中水平地延伸的臂480。臂480用以实现夹钳450接近患者的身体开口或切口的定位。臂480被配置成经由如图9中所示的可调整块900沿着柱470、沿着y轴竖直地(箭头484)平移。可调整块900界定臂收纳孔隙912,例如臂480的臂可插入在所述孔隙中,且在一些实施例中,可在所述孔隙中平移。例如,臂480进一步包括沿着其长度的一个或多个棘爪478,使得臂480相对于柱470沿着x轴水平地平移穿过可调整块900(箭头482),且锁定在可调整块900内的任一棘爪位置处的位置,如图4和9中所示。
32.此外,如图4和9中所示,臂480相对于柱470在y方向上的移动484也穿过可调整块900。可调整块900进一步包括负载有弹簧914的凸轮作用板916。当向下的力918被施加到可调整块900、臂480和/或夹钳450上时,板916受到弹簧914的偏压以保持可调整块900的位置。在一些实施例中,柱450包含一个或多个锯齿,其被配置成当向上的力922被施加到可调整块900、臂480和/或夹钳450时保持可调整块900的位置。在其它实施例中,可调整块900进一步包含第二凸轮作用板,其受到弹簧的偏压且被配置成在向上的力922被施加于可调整块900、臂480和/或夹钳450上时保持可调整块900的位置。
33.转向图5a到6,内窥镜控制装置进一步包含夹钳550、650。如图5a中所示,夹钳550用以在其中收纳内窥镜572,且周向地对内窥镜572施加力,以减少或防止内窥镜572的轴向和/或旋转平移且避免内窥镜572的侧面上的离散负载。各种夹钳配置示出于图5a到6和10到12中。聚焦于图6中所示的夹钳650的分解图,可经由夹钳的第一侧或固持器侧上的拉杆652和丝杠654以及夹钳的第二侧或衬垫侧上的旋钮676和丝杠674致动夹钳650。固持器664包含第一或顶部侧壁656a和第二或底部侧壁656b,其一起界定内窥镜收纳区域662。内窥镜收纳区域662界定大体上半圆柱形表面,以用于接触和强制性地限制其中收纳的内窥镜。第一或顶部侧壁556a、656a和第二或底部侧壁556b、656b可在第一或打开配置(图5a)与第二或闭合或夹持配置(图5b)之间移动或转变,在所述第一配置中,第一或顶部侧壁556a、656a和第二或底部侧壁556b、656b被配置成在内窥镜572定位于内窥镜收纳区域562、662中时与内窥镜分离,如图5a到6中所示,在所述第二配置中,第一侧壁556a、656a和第二侧壁556b、656b被配置成在内窥镜572定位于内窥镜收纳区域562、662中时夹持内窥镜,如图5b中所示。在一些实施例中,固持器664包括不对称固持器,使得第二侧壁656b比第一侧壁656a长。例如,第二侧壁656b可比第一侧壁656a长10%到15%、15%到20%、20%到25%、25%到30%、30%到35%、35%到40%、40%到45%、45%到50%、50%到55%、55%到60%、60%到65%、65%到70%、70%到75%、75%到80%、80%到85%、85%到90%、90%到95%或95%到100%。在此类不对称固持器实施例中,内窥镜被配置成在不对称固持器处于第一或打开
或未夹持配置时搁置于第二侧壁656b上。替代地或另外,固持器664进一步包含进一步形成或界定内窥镜收纳区域662的半圆柱形表面的第三侧壁656c。
34.拉杆652被配置成在第一与第二配置之间移动第一侧壁656a和第二侧壁656b。例如,拉杆652可在例如如图5a中的释放或未夹持配置与如图5b中的致动或夹持配置的两个配置,或实现第一侧壁656a和第二侧壁656b的移动的多个位置之间移动。此外,例如,在一些实施例中,拉杆652实现第一侧壁656a和第二侧壁656b在第一与第二配置之间的一个或多个中间配置之间进行移动。在使用拉杆652旋转拉杆主体694时,丝杠654前进,从而抵靠衬垫658和衬垫658的一个或多个支撑元件(例如,板678、安装于支撑壁672中的丝杠674)推动壁692和内窥镜572定位在其中的固持器664。丝杠且最终固持器664的此移动被配置成使得侧壁656a、656b向内移动,从而引起内窥镜收纳区域662的面积减小,使得侧壁656a、656b增大与定位于内窥镜收纳区域662中的内窥镜的周向接触。围绕内窥镜572的此周向接触以类似于人手和手指施加的抓握的方式抓握内窥镜572。拉杆652的持续运动增大了固持器664朝向衬垫658的前进,从而增大周向接触且因此增大围绕内窥镜主体的抓握力。
35.在一些实施例中,在拉杆652被90度致动时,丝杠654前进1/4英寸;在其它实施例中,拉杆652被n度致动(例如,n等于1到360度的任何数字),此使丝杠前进0到1英寸,例如0到0.1英寸、0.1到0.2英寸、0.1到0.25英寸、0.2到0.3英寸、0.3到0.4英寸、0.4到0.5英寸、0.5到0.6英寸、0.6到0.75英寸、0.7到0.8英寸、0.8到0.9英寸、0.9到1英寸等。拉杆主体694中的一个或多个棘爪或凹槽与弹簧负载球形棘爪机构698(其固定于支撑件682中)相互作用,以使得拉杆652能够锁定到任一位置。在一些实施例中,拉杆652或夹钳650的操作者可接收到指示拉杆652何时锁定到任一位置的可听(例如,球形棘爪机构咔哒声)、触觉(例如,在锁定到任一位置时起始振动的在拉杆主体中的压电式机构,用户感觉到棘爪机构的卡扣等)和/或视觉(例如,在锁定到任一位置时激活灯)反馈。
36.此外,如图5a到6中所示,内窥镜控制装置550、650包含与内窥镜收纳区域562、662相对的衬垫558、658。衬垫558、658用以接触定位于夹钳550、650中的内窥镜572,以防止内窥镜572在侧壁656a、656b、(任选地)656c从第一配置移动到第二配置时从内窥镜收纳区域562、662移位,从而将内窥镜夹持在收纳区域中。另外,衬垫558、658充当静态壁,用作固持器664前进的止挡件。因此,衬垫558、658可在如图5a中所示的第一或打开位置与如图5b中所示的第二或闭合位置之间移动。在第二或闭合位置中,衬垫558、658对定位于其中的内窥镜572施加力。衬垫558、658可进一步包含一个或多个或多个中间配置,使得可调整衬垫558、658以允许不同直径的内窥镜。如图6中所示,旋钮676使丝杠674旋转穿过支撑壁672,此使联接到衬垫658的板678前向移动以接触定位于其中的内窥镜或使联接到衬垫658的板678缩回以与定位于其中的内窥镜脱离。通过定位销696防止板678与丝杠674一起旋转,定位销固定在板678中但在支撑壁672中自由滑动,借此提供板678的旋转阻力。
37.支撑件682充当用于将夹钳650的各种元件联接在一起的平台。支撑件682相对于枢轴686上的凸缘684旋转,所述枢轴固定到支撑件682。底座688附接到凸缘684(经由一个或多个紧固件,例如4个螺钉),且联接到内窥镜控制装置的臂。垫圈689、波形弹簧685和外部环夹691共同地用以将凸缘684紧固到枢轴686且提供旋转摩擦。在一些实施例中,底座488经由臂480和底座488中的互补棘爪机构沿着臂480水平地(箭头482)平移,如图4中所示。例如,弹簧负载球形棘爪642(图6中所示)与沿着臂480的一个或多个棘爪478(图4中所
示)相互作用。在其它实施例中,底座488在臂480的远端486处(或沿着臂480的任何位置)固定地连接到臂480。
38.现转向图10a到12b,其示出替代性夹钳实施例。图10a示出处于打开的未装载配置的夹钳1000,且图10b示出处于闭合的夹持配置的夹钳1000。图10a到10b的夹钳1000包括固持器1004,所述固持器界定内窥镜穿过其中插入到夹钳1000中的入口孔隙1002,以及通过侧壁1008和衬垫1010a、1010b夹持内窥镜的内窥镜收纳区域1022。图10b示出处于闭合或夹持配置的夹钳1000,使得定位于内窥镜收纳区域1022中的内窥镜在轴向和/或旋转方面受限。在闭合配置中,偏心拉杆1006(即,凸轮作用拉杆)被配置成使侧壁1008和衬垫1010a移位,以限制定位于内窥镜收纳区域1022中的内窥镜。侧壁1008和衬垫1010a优选是弯曲的,使得其沿着内窥镜的周向线接触定位于其中的内窥镜。在打开或未夹持配置中,如图10a中所示,偏心拉杆1006大体上并不使侧壁1008和衬垫1010a移位,使得侧壁1008和衬垫1010a接近偏心拉杆1006的旋转中心1018,且定位在夹钳1000内的内窥镜不受限制。
39.转向图11a到11b,其示出夹钳1100的替代性实施例。如图11b中所示,在闭合或夹持配置中,偏心拉杆1106激活侧壁1108a、1108b,此使得衬垫1110a、1110b在内窥镜的相对侧上接触定位在固持器1104内的内窥镜,从而轴向和/或旋转地限制内窥镜。固持器1104界定用于在夹持期间固持内窥镜的内窥镜收纳区域1122。内窥镜穿过由固持器1104界定的入口孔隙1102定位于固持器1104中。在打开或未夹持配置中,如图11a中所示,偏心拉杆1106大体上并不使侧壁1108a、1108b移位,且因此并不移位衬垫1110a、1110b,使得定位在夹钳1100内的内窥镜不受限制。此外,侧板1112(固持器1104的每一侧上都有一个)将内窥镜引导到内窥镜收纳区域1122中。在解锁内窥镜以允许内窥镜在固持器1104中自由移动时,侧板1112的内边缘1114将内窥镜保持在衬垫1110a、1110b的表面上方。
40.转向图12a到12b,其示出夹钳1200的另一实施例。如图12b中所示,固持器1204界定入口孔隙1202,内窥镜穿过所述入口孔隙插入到夹钳1200中且插入到在夹持期间固持内窥镜的内窥镜收纳区域1222中。在夹持或闭合配置中,如图12b中所示,旋转可旋转柱1214(例如,90度、45到90度、75到100度等)将旋转推动器1212,从而使得推动器由于其上部弯曲凸轮表面与固持器1204的内弯曲表面相互作用而向下移位。此将使得衬垫1210a朝向固持器1204中的衬垫1210b前进,借此将内窥镜夹持在衬垫1210a、1210b之间。在打开或未夹持配置中,如图12a中所示,经由压缩弹簧缩回可旋转柱1214,所述压缩弹簧抵靠固持器1204的内表面保持推动器1212的上部表面,使得固持器并不接触或限制定位于内窥镜收纳区域1222中的内窥镜。
41.转向图13,其示出使用本文中在别处描述的一个或多个内窥镜控制装置的方法1300。如图13中所示,使用一个或多个内窥镜控制装置的方法包含将内窥镜定位于夹钳的固持器中s1310;任选地(由围绕块s1320的虚线指示)将衬垫从第一位置调整到第二位置,其中在第二位置中,内窥镜被配置成接触内窥镜的第二表面,所述第二表面与内窥镜的接触固持器的第一表面相对s1320;以及致动固持器,使得固持器的第一侧壁和/或第二侧壁中的一个或多个移动到第二或夹持配置以施加力来限制内窥镜的轴向和/或旋转移动s1330。
42.方法1300优选地与本文中在别处描述的夹钳中的任一个一起起作用。在图12的实施例中,用可旋转销的末端替换侧壁。在至少图5a到6的夹钳的实施例中,通过固持器的第
一和第二侧壁将周向力施加到定位于其中的内窥镜的外径。在固持器不对称(图5a到6)或大体上为环形(图10到12)的实施例中,当第一侧壁和第二侧壁中的一个或多个处于第一打开或未夹持配置时,内窥镜搁置于固持器的第二侧壁上或固持器的环圈的内径上。
43.本公开的一个方面涉及一种用于可逆地约束内窥镜的装置。装置可包含可接近患者定位的底座。在前述实施例中的任一个中,表面可为床、地板、立件、三角架等。在前述实施例中的任一个中,装置可进一步包含从底座竖直地延伸的柱。在前述实施例中的任一个中,柱可以可枢转地联接到底座。在前述实施例中的任一个中,装置可包含从柱水平地延伸的臂。在前述实施例中的任一个中,臂可被配置成沿着柱竖直地平移。在前述实施例中的任一个中,臂可被配置成相对于柱水平地平移。在前述实施例中的任一个中,装置可包含联接到臂的夹钳。在前述实施例中的任一个中,夹钳可被配置成相对于臂枢转。在前述实施例中的任一个中,夹钳可包含包括第一侧壁和第二侧壁的固持器。
44.在前述实施例中的任一个中,第一侧壁和/或第二侧壁可为弯曲的,使得曲率半径可在2mm到15mm或0.1英寸到0.5英寸之间。替代地,在前述实施例中的任一个中,第一和第二侧壁为平面的,使得固持器包含第三弯曲或u形侧壁,所述第三侧壁具有在2mm到15mm之间且包含2mm和15mm的曲率半径。
45.在前述实施例中的任一个中,第一侧壁和第二侧壁一起界定内窥镜收纳区域。替代地,在前述实施例中的任一个中,第一、第二和第三侧壁形成内窥镜收纳区域。再替代地,在前述实施例中的任一个中,固持器包括单片组件,其发生变形以抓握内窥镜且返回到未变形状态以释放内窥镜。
46.在前述实施例中的任一个中,固持器可在第一配置与第二配置之间转变,在所述第一配置中,第一侧壁和第二侧壁被配置成在内窥镜定位于内窥镜收纳区域中时夹持内窥镜,在所述第二配置中,第一侧壁和第二侧壁被配置成在内窥镜定位于内窥镜收纳区域中时与内窥镜分离。替代地,在前述实施例中的任一个中,固持器可在第一配置与第二配置之间转变,在所述第一配置中,第一、第二和第三侧壁被配置成在内窥镜定位于内窥镜收纳区域中时夹持内窥镜,在所述第二配置中,第一、第二和第三侧壁被配置成在内窥镜定位于内窥镜收纳区域中时与内窥镜分离。
47.在前述实施例中的任一个中,装置可包含与内窥镜收纳区域相对的衬垫。在前述实施例中的任一个中,衬垫可在第一位置与第二位置之间移动,在所述第一位置中,衬垫在内窥镜定位于内窥镜收纳区域中时接触内窥镜,在所述第二位置中,衬垫在内窥镜定位于内窥镜收纳区域中时并不接触内窥镜。
48.在前述实施例中的任一个中,当固持器处于第一配置且衬垫处于第二位置中时,防止内窥镜进行平移移动。
49.在前述实施例中的任一个中,当固持器处于第一配置且衬垫处于第二位置中时,防止内窥镜进行旋转移动。
50.在前述实施例中的任一个中,当固持器处于第一配置且衬垫处于第二位置中时,防止内窥镜进行平移和旋转移动。
51.在前述实施例中的任一个中,固持器包括不对称固持器,使得第二侧壁比第一侧壁长。
52.在前述实施例中的任一个中,固持器包括不对称固持器,使得单片固持器的第一
侧比单片固持器的第二侧长。
53.在前述实施例中的任一个中,内窥镜被配置成在不对称固持器处于第二配置时搁置于第二侧壁或第二侧上。
54.在前述实施例中的任一个中,衬垫被配置成在处于第一位置中时对内窥镜施加力。
55.在前述实施例中的任一个中,第一和第二侧壁被配置成在处于第一配置时对内窥镜施加力。替代地,在前述实施例中的任一个中,第一、第二和第三侧壁被配置成在处于第一配置时对内窥镜施加力。再替代地,在前述实施例中的任一个中,单片固持器的第一和第二侧被配置成在处于变形配置时对内窥镜施加力。
56.在前述实施例中的任一个中,柱被配置成相对于底座以10
°
的增量枢转。替代地,在前述实施例中的任一个中,柱被配置成相对于底座以离散增量枢转。再替代地,在前述实施例中的任一个中,柱被配置成相对于底座无限地枢转。在前述实施例中的任一个中,柱被配置成相对于底座在180
°
的运动范围内枢转。在前述实施例中的任一个中,柱被配置成相对于底座在360
°
的运动范围内枢转。
57.在前述实施例中的任一个中,夹钳进一步包括被配置成在第一与第二配置之间移动第一和第二侧壁的拉杆。替代地,在前述实施例中的任一个中,夹钳进一步包括被配置成在第一与第二配置之间移动第一、第二和第三侧壁的拉杆。再替代地,在前述实施例中的任一个中,夹钳进一步包括被配置成在变形与未变形配置之间移动单片夹钳的第一和第二侧的拉杆。
58.在前述实施例中的任一个中,第一和第二侧壁被进一步配置成在第一与第二配置之间的一个或多个中间配置之间移动。替代地,在前述实施例中的任一个中,第一、第二和第三侧壁被配置成在第一与第二配置之间的一个或多个中间配置之间移动。再替代地,在前述实施例中的任一个中,单片固持器的第一和第二侧被配置成在变形与未变形配置之间的一个或多个中间配置之间移动。
59.在前述实施例中的任一个中,拉杆可在多个位置之间移动以在一个或多个中间配置与第一和第二配置之间移动第一和第二侧壁。替代地,在前述实施例中的任一个中,拉杆可在多个位置之间移动以在一个或多个中间配置与第一和第二配置之间移动第一、第二和第三侧壁。再替代地,在前述实施例中的任一个中,拉杆可在多个位置之间移动以在一个或多个中间配置与变形和未变形配置之间移动单片固持器的第一和第二侧。
60.在前述实施例中的任一个中,夹钳的全部或部分是一次性的。
61.在前述实施例中的任一个中,夹钳被进一步配置成沿着臂水平地平移。
62.在前述实施例中的任一个中,装置进一步包含夹钳释放机构。在前述实施例中的任一个中,夹钳释放机构可包括按钮、拉杆、踏板等。在前述实施例中的任一个中,夹钳释放机构可手动地致动、气动地致动、电气地致动、液压地致动、压力激活、语音激活、视线激活、自动地激活(例如,使用人工智能或机器学习算法等)等。
63.在前述实施例中的任一个中,装置进一步包含被配置成至少覆盖夹钳的手术盖布。
64.本公开的另一方面涉及一种可逆地限制内窥镜的方法。在一些实施例中,所述方法包含将内窥镜定位于夹钳的固持器中;以及致动固持器,使得固持器的第一侧壁和第二
侧壁中的一个或多个移动到夹持配置以对内窥镜施加力。
65.在前述实施例中的任一个中,方法进一步包含将夹钳的衬垫从第一位置调整到第二位置,其中在第二位置中,衬垫接触内窥镜。
66.在前述实施例中的任一个中,方法进一步包含提供包括固持器的夹钳。在前述实施例中的任一个中,固持器包含第一侧壁和第二侧壁,使得第一侧壁和第二侧壁一起界定内窥镜收纳区域,且使得固持器可在第一配置与第二配置之间转变,在所述第一配置中,第一侧壁和第二侧壁被配置成在内窥镜定位于内窥镜收纳区域中时与内窥镜分离,在所述第二配置中,第一侧壁和第二侧壁被配置成在内窥镜定位于内窥镜收纳区域中时夹持内窥镜。
67.在前述实施例中的任一个中,方法进一步包含将夹钳联接到从柱水平地延伸的臂,所述柱从底座竖直地延伸。
68.在前述实施例中的任一个中,方法进一步包含将底座定位成接近患者。
69.在前述实施例中的任一个中,方法进一步包含将手术盖布定位在夹钳上方。
70.在前述实施例中的任一个中,方法进一步包含通过固持器的第一和第二侧壁对定位于其中的内窥镜的外径施加力。
71.本公开的另一方面涉及一种用于可逆地约束内窥镜的装置。在一些实施例中,装置包含可接近患者定位的底座;从底座竖直地延伸的柱;从柱水平地延伸的臂;以及联接到臂的夹钳。
72.在前述实施例中的任一个中,夹钳包含包括界定内窥镜收纳区域的环圈的固持器,使得固持器可在第一配置与第二配置之间转变,在所述第一配置中,环圈在内窥镜定位于内窥镜收纳区域中时与内窥镜分离,在所述第二配置中,环圈被配置成在内窥镜定位于内窥镜收纳区域中时夹持内窥镜。
73.在前述实施例中的任一个中,夹钳进一步包含与内窥镜收纳区域相对的衬垫,使得衬垫可在第一位置与第二位置之间移动,在所述第一位置中,衬垫在内窥镜定位于内窥镜收纳区域中时并不接触内窥镜,在所述第二位置中,衬垫在内窥镜定位于内窥镜收纳区域中时接触内窥镜。
74.在前述实施例中的任一个中,臂被配置成沿着柱竖直地且相对于柱水平地平移。
75.在前述实施例中的任一个中,夹钳被配置成相对于臂枢转。
76.在前述实施例中的任一个中,当固持器处于第二配置且衬垫处于第二位置中时,防止内窥镜进行平移和旋转移动。
77.在前述实施例中的任一个中,固持器包括不对称固持器,使得环圈的第二侧壁比环圈的第一侧壁长。
78.在前述实施例中的任一个中,内窥镜被配置成在不对称固持器处于第一配置时搁置于第二侧壁上。
79.在前述实施例中的任一个中,衬垫被配置成在处于第二位置中时对内窥镜施加力。
80.在前述实施例中的任一个中,环圈被配置成在处于第二配置时对内窥镜施加力。
81.在前述实施例中的任一个中,柱可枢转地联接到底座。
82.在前述实施例中的任一个中,柱被配置成相对于底座以10
°
的增量枢转。
83.在前述实施例中的任一个中,夹钳进一步包括被配置成在第一与第二配置之间移动第一和第二侧壁的拉杆。
84.在前述实施例中的任一个中,夹钳的全部或部分是一次性的。在前述实施例中的任一个中,夹钳被进一步配置成沿着臂水平地平移。
85.本公开的另一方面涉及一种用于可逆地约束内窥镜的装置。在一些实施例中,装置包含可接近患者定位的底座;从底座竖直地延伸的柱;从柱水平地延伸的臂;以及联接到臂的夹钳。在一些实施例中,夹钳包含:包括第一侧壁和第二侧壁的固持器,使得第一侧壁和第二侧壁一起界定内窥镜收纳区域,且使得固持器可在第一配置与第二配置之间转变,在所述第一配置中,第一侧壁和第二侧壁被配置成在内窥镜定位于内窥镜收纳区域中时与内窥镜分离,在所述第二配置中,第一侧壁和第二侧壁被配置成在内窥镜定位于内窥镜收纳区域中时夹持内窥镜。
86.在前述实施例中的任一个中,夹钳进一步包含与内窥镜收纳区域相对的衬垫,其中衬垫可在第一位置与第二位置之间移动,在所述第一位置中,衬垫在内窥镜定位于内窥镜收纳区域中时并不接触内窥镜,在所述第二位置中,衬垫在内窥镜定位于内窥镜收纳区域中时接触内窥镜。
87.在前述实施例中的任一个中,臂被配置成沿着柱竖直地且相对于柱水平地平移。
88.在前述实施例中的任一个中,夹钳被配置成相对于臂枢转。
89.在前述实施例中的任一个中,当固持器处于第二配置且衬垫处于第二位置中时,防止内窥镜进行平移和旋转移动。
90.在前述实施例中的任一个中,固持器包括不对称固持器,使得第二侧壁比第一侧壁长。
91.在前述实施例中的任一个中,内窥镜被配置成在不对称固持器处于第一配置时搁置于第二侧壁上。
92.在前述实施例中的任一个中,衬垫被配置成在处于第二位置中时对内窥镜施加力。
93.在前述实施例中的任一个中,第一和第二侧壁被配置成在处于第二配置时对内窥镜施加力。
94.在前述实施例中的任一个中,柱可枢转地联接到底座。
95.在前述实施例中的任一个中,柱被配置成相对于底座以10
°
的增量枢转。
96.在前述实施例中的任一个中,夹钳进一步包括被配置成在第一与第二配置之间移动第一和第二侧壁的拉杆。
97.在前述实施例中的任一个中,夹钳的全部或部分是一次性的。
98.在前述实施例中的任一个中,夹钳被进一步配置成沿着臂水平地平移。
99.尽管本文中设想各种移动机构,例如棘爪机构、可旋转凸缘、弹簧负载球或板等,但所属领域的技术人员可修改此类移动机构且此类修改也在本公开的范围内。
100.如在说明书和权利要求书中所使用,单数形式“一个(a/an)”和“所述(the)”包含单数个提及物和复数个提及物两者,除非上下文另外明确规定。例如,术语“位置”可包含且设想为包含多个位置。有时,权利要求书和公开内容可包含例如“多个”、“一个或多个”或“至少一个”的术语;然而不存在此类术语不意味着并且不应解释为意味着不考虑多个。
101.当在数字标号或范围之前使用术语“约”或“大约”(例如,以界定长度或压力)时,所述术语指示可以变化(+)或(-)5%、1%或0.1%的近似值。本文提供的所有数值范围包含所陈述的开始值和结束值。术语“大体上”指示主要(即,大于50%)或基本上所有的装置、物质或组合物。
102.如本文所使用,术语“包括(comprising/comprises)”意指装置、系统和方法包含所列举的要素,且可另外包含任何其它要素。“基本上由
……
组成”应意指装置、系统和方法包含所列举的要素并且排除对所陈述目的的组合有重要意义的其它要素。因此,基本上由如本文所界定的要素组成的系统或方法将不排除不实质上影响所要求的公开内容的基本和新颖特征的其它材料、特征或步骤。“由
……
组成”应意指装置、系统和方法包含所列举要素且排除多于不重要的或不连贯的要素或步骤的任何内容。由这些过渡术语中的每一个界定的实施例属于本公开的范围内。
103.在本文中包含的实例和图示以说明方式示出并且不限制其中可实践主题的特定实施例。可利用其它实施例并且从本文中导出其它实施例,使得可在不脱离本公开的范围的情况下进行结构和逻辑的取代和变化。本文中可以个别地或共同地通过术语“本发明”提及本发明主题的此类实施例,这仅仅是为了方便起见,且如果实际上公开了多于一个发明或发明概念,则不旨在有意将本技术的范围限制于任何单个发明或发明概念。因此,尽管已在本文中说明且描述特定实施例,但经计算以实现相同目的的任何布置可取代所示的特定实施例。本公开意图涵盖各种实施例的任何和所有调适或变化形式。对于所属领域的技术人员而言,在审阅上文描述之后上文实施例的组合以及本文中未具体描述的其它实施例将是显而易见的。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1