基于大腿形状而可变形的行走辅助装置的制作方法
1.本技术根据美国法典第35卷第119条主张2019年11月1日在韩国知识产权局提交的第10-2019-0138713号韩国专利申请,其全部内容通过引用整体合并于此。
背景技术:
2.至少一个示例实施例涉及一种可基于大腿形状变形的行走辅助装置。
3.正在开发使具有关节问题的患者和/或老年人能够以较少的力气行走的行走辅助装置,以及出于军事目的的增加用户肌肉力量的行走辅助装置。
技术实现要素:
4.一些示例实施例涉及一种行走辅助装置,其基于大腿形状而可变形以紧密地贴合用户的身体形状,并因此改善用户可穿戴性并减小装置体积。
5.一些示例实施例涉及一种被构造为辅助用户的行走辅助装置。
6.在一些示例实施例中,所述行走辅助装置包括髋关节致动器;上方大腿支架,连接到所述髋关节致动器,所述上方大腿支架被构造为响应于从所述髋关节致动器接收的动力而绕着第一轴线旋转,并且绕着与所述第一轴线交叉的第二轴线旋转;运动支架,连接到所述上方大腿支架,所述运动支架包括多个分段支架,其中,所述多个分段支架被构造为基于所述用户的大腿的形状而相对于彼此旋转;以及连接到所述运动支架的下方大腿支架。
7.在一些示例实施例中,所述多个分段支架包括:上段支架,连接到所述上方大腿支架;以及下段支架,连接到所述下方大腿支架,其中,所述下段支架被构造为相对于所述上段支架旋转。
8.在一些示例实施例中,所述上段支架与所述上方大腿支架一体地形成,以及所述下段支架与所述下方大腿支架一体地形成。
9.在一些示例实施例中,所述上段支架能够可拆卸地连接到所述上方大腿支架,以及所述下段支架能够可拆卸地连接到所述下方大腿支架。
10.在一些示例实施例中,所述运动支架还包括:弹性体,包括固定到所述上段支架的第一端部和固定到所述下段支架的第二端部。
11.在一些示例实施例中,所述运动支架还包括:旋转轴,被构造为连接所述上段支架和所述下段支架,使得所述旋转轴平行于所述第二轴线,其中,所述弹性体被构造为包围所述旋转轴。
12.在一些示例实施例中,所述运动支架还包括:止动件,被构造为限制所述上段支架相对于所述下段支架的旋转角度。
13.在一些示例实施例中,所述止动件从所述上段支架和所述下段支架中的第一个分段支架朝向所述上段支架和所述下段支架中的第二个分段支架延伸。
14.在一些示例实施例中,所述多个分段支架包括:第一段支架;第二段支架,可旋转地连接到所述第一段支架的第一端;第三段支架,可旋转地连接到所述第一段支架的第二
端;第四段支架,可旋转地连接到所述第二段支架;以及第五段支架,可旋转地连接到所述第三段支架和所述第四段支架,其中,所述上方大腿支架连接到所述第二段支架。
15.在一些示例实施例中,所述运动支架还包括:弹性体,包括固定到所述第四段支架的第一端和固定到所述第五段支架的第二端。
16.在一些示例实施例中,所述运动支架还包括:第一止动件,被构造为限制所述第二段支架相对于所述第四段支架的旋转角度;以及第二止动件,被构造为限制所述第三段支架相对于所述第五段支架的旋转角度。
17.在一些示例实施例中,所述第二段支架能够可拆卸地连接到所述上方大腿支架,以及所述第三段支架能够可拆卸地连接到所述下方大腿支架。
18.在一些示例实施例中,所述多个运动支架被构造为彼此串联连接。
19.在一些示例实施例中,所述多个运动支架包括:第一运动支架,包括具有第一极性的第一磁体和被构造为容纳所述第一磁体的第一支架主体;以及第二运动支架,包括具有第二极性的第二磁体和可旋转地连接到所述第一支架主体的第二支架主体,其中,所述第二运动支架被构造为容纳被构造为面向所述第一磁体的所述第二磁体。
20.在一些示例实施例中,所述第一支架主体和所述第二支架主体中的每一个支架主体包括面向彼此的圆形端部。
21.其他示例实施例涉及一种被构造为辅助用户的行走辅助装置。
22.在一些示例实施例中,所述行走辅助装置包括:上方大腿支架;下方大腿支架;以及连接在所述上方大腿支架与所述下方大腿支架之间的运动支架,其中,所述运动支架包括多个分段支架,所述多个分段支架被构造为通过相对于所述多个分段支架中的相邻分段支架旋转来确定所述上方大腿支架与所述下方大腿支架之间的角度,以基于所述用户的大腿的形状调整相对于所述多个分段支架中的所述相邻分段支架的相对角度。
23.在一些实例实施例中,所述运动支架被构造为:绕着平行于第二轴且垂直于第一轴的一个或更多个第三轴旋转。
24.在一些示例实施例中,运动支架被构造为:调整上方支架与下方支架之间的设定距离。
25.在一些示例实施例中,当所述用户直立时,所述运动支架从所述上方支架向下延伸。
26.在一些示例实施例中,所述行走辅助装置还包括附接到所述下方支架的下端的可穿戴部分,其中,所述可穿戴部分被构造为固定所述用户的大腿。
27.在一些实例实施例中,所述运动支架被构造为:绕着平行于所述第二轴且垂直于所述第一轴的一个或多个第三轴旋转。
28.在一些示例实施例中,所述运动支架被构造为:调整所述上方支架与所述下方支架之间的设定距离。
29.在一些示例实施例中,当所述用户直立时,所述运动支架从所述上方支架向下延伸。
30.在一些示例实施例中,所述行走辅助装置还包括附接到所述下方支架的下端的可穿戴部分,其中,所述可穿戴部分被构造为固定所述用户的大腿。
31.示例实施例的附加方面将部分地在下面的描述中阐述,并且部分地将从描述中显
而易见,或者可通过本公开的实践来学习。
附图说明
32.从以下结合附图对示例实施例的描述中,这些和/或其他方面将变得显而易见并且更容易理解,其中:
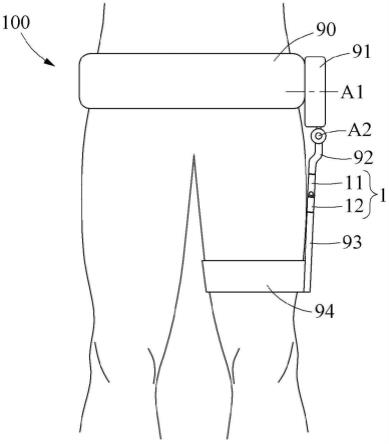
33.图1示出穿戴根据至少一个示例实施例的行走辅助装置的用户;
34.图2示出穿戴根据至少一个示例实施例的行走辅助装置的用户,其中,该用户在与图1的用户相比时具有更粗的大腿;
35.图3是示出根据至少一个示例实施例的行走辅助装置的前视图;
36.图4是示出根据至少一个示例实施例的运动支架的前视图;
37.图5是沿着图4的线v-v截取的截面图;
38.图6是示出图5的运动支架的变形的截面图;
39.图7示出穿戴根据至少一个示例实施例的行走辅助装置的用户;
40.图8是示出根据至少一个示例实施例的运动支架的侧视图;
41.图9是示出图8的运动支架的变形的截面图;
42.图10是示出根据至少一个示例实施例的运动支架的前视图;
43.图11是沿着图10的线xi-xi截取的截面图;以及
44.图12是示出图11的运动支架的变形的截面图。
具体实施方式
45.在下文中,将参照附图详细描述一些示例实施例。关于分配给附图中的元件的附图标号,应当注意的是,即使相同的元件在不同的附图中示出,只要可以,相同的元件就将由相同的附图标号来表示。此外,在示例实施例的描述中,当认为公知的相关结构或功能的详细描述将导致对本公开的模糊解释时,将省略这种描述。
46.另外,这里可使用诸如第一、第二、a、b、(a)、(b)等的术语来描述组件。这些术语中的每一个不用于定义相应组件的本质、顺序或序列,而是仅用于将相应组件与其他组件区分开。应当注意的是,如果在说明书中描述了一个组件“连接”、“结合”或“接合”到另一组件,则尽管第一组件可直接连接、结合或接合到第二组件,第三组件也可在第一组件和第二组件之间“连接”、“结合”和“接合”。
47.可使用相同的名称来描述包括在上述示例实施例中的元件和具有共同功能的元件。除非另有说明,否则对示例实施例的描述可适用于以下示例实施例,因此,为了简明起见,将省略重复的描述。
48.图1示出穿戴根据至少一个示例实施例的行走辅助装置的用户,并且图2示出穿戴根据至少一个示例实施例的行走辅助装置的用户,其中,该用户在与图1的用户相比时具有更粗的大腿。
49.参照图1和图2,在一个或更多个示例实施例中,行走辅助装置100可以基于用户的大腿形状而变形。例如,行走辅助装置100可紧密地贴合具有相对较细大腿的用户,并且还可紧密地贴合具有相对较粗大腿的用户。当行走辅助装置100紧密地贴合用户的大腿时,行走辅助装置100与用户的大腿之间的间隔距离可减小。用户可在行走辅助装置100之上穿戴
衣服,并且用户感觉到的可穿戴性可改善。
50.行走辅助装置100可辅助用户的髋关节。行走辅助装置100可包括腰部可穿戴部分90、髋关节致动器91、上方大腿支架92、运动支架1、下方大腿支架93和大腿可穿戴部分94。运动支架1可基于用户的大腿形状而变形。上方大腿支架92可调节相对于髋关节致动器91的角度。通过上方大腿支架92的角度调节和运动支架1的变形程度,行走辅助装置100可紧密地贴合用户的大腿。
51.腰部可穿戴部分90可支撑用户的腰部。腰部可穿戴部分90可具有基于用户的腰围而可调节的长度。腰部可穿戴部分90可支撑髋关节致动器91。腰部可穿戴部分90可置于使得髋关节致动器91可被布置在髋关节旁边的位置。
52.髋关节致动器91可产生用于辅助用户的髋关节的动力。髋关节致动器91可支撑上方大腿支架92。髋关节致动器91可使上方大腿支架92绕着第一轴线a1旋转。髋关节致动器91可辅助大腿的伸展和屈曲。
53.上方大腿支架92可连接到髋关节致动器91,并且接收来自髋关节致动器91的动力并绕着第一轴线a1旋转且绕着与第一轴线a1交叉的第二轴线a2旋转。上方大腿支架92可响应于大腿的内收或外展而绕着髋关节致动器91旋转。除了大腿的内收或外展之外,上方大腿支架92还可基于用户的大腿形状绕着髋关节致动器91旋转。例如,当具有相对较粗大腿的用户穿戴行走辅助装置100时,上方大腿支架92可绕着髋关节致动器91向外旋转。
54.运动支架1可包括额外的自由度(dof),以便基于用户的大腿形状而变形。运动支架1可变形并且确定上方大腿支架92与下方大腿支架93之间的角度。运动支架1可置于上方大腿支架92与下方大腿支架93之间。运动支架1可包括被构造为相对于彼此旋转的多个分段支架11和12。多个分段支架11和12可包括被连接以执行1-dof旋转的上段支架11和下段支架12。
55.例如,当具有相对较粗大腿的用户穿戴行走辅助装置100时,上段支架11与下段支架12之间的角度可小于当具有相对较细大腿的用户穿戴行走辅助装置100时的上段支架11与下段支架12之间的角度。
56.运动支架1可基于上方大腿支架92绕着髋关节致动器91的角度而变形。例如,当大腿相对较粗的用户穿戴行走辅助装置100时,行走辅助装置100可通过这样的方式紧密地贴合用户的大腿:大腿向外推动上方大腿支架92并且下段支架12相对于上段支架11沿朝向大腿的方向弯曲。
57.运动支架1可设置为与上方大腿支架92和下方大腿支架93一体,或者可以可拆卸地连接到上方大腿支架92和下方大腿支架93。当运动支架1可拆卸地连接到上方大腿支架92和下方大腿支架93时,用户可在必要时将运动支架1安装在上方大腿支架92与下方大腿支架93之间,或者从行走辅助装置100移除运动支架1。例如,如果从行走辅助装置100移除了运动支架1,则下方大腿支架93可直接安装在上方大腿支架92上。
58.运动支架1可包括构造为固定上方大腿支架92与下方大腿支架93之间的角度的固定构件(未示出)。
59.下方大腿支架93可连接到运动支架1。下方大腿支架93可设置为与运动支架1一体,或者可拆卸地连接到运动支架1。
60.大腿可穿戴部分94可支撑用户的大腿。大腿可穿戴部分94可具有基于用户的腿围
而可调节的长度。
61.参照图1,具有相对较细大腿的用户可穿戴行走辅助装置100。在该示例中,运动支架1的上段支架11与下段支架12之间的角度可相对较大。详细地讲,上段支架11和下段支架12可形成近似直线,使得上段支架11与下段支架12之间的角度可近似180度。
62.参照图2,具有相对较粗大腿的用户可穿戴行走辅助装置100。在该示例中,上方大腿支架92可保持处于这样的状态:被大腿绕着第二轴线a2向外(即,沿逆时针方向)推动。另外,下段支架12可保持处于这样的状态:绕着上段支架11向内(即,沿顺时针方向)旋转,并且下方大腿支架93可紧密地贴合用户的大腿。
63.图3是示出根据至少一个示例实施例的行走辅助装置的前视图,图4是示出根据至少一个示例实施例的运动支架的前视图,图5是沿着图4的线v-v截取的截面图,并且图6是示出图5的运动支架的变形的截面图。
64.参照图3至图6,运动支架1可包括上段支架11、下段支架12、旋转轴13、弹性体14、止动件15、上方连接构件17、按钮18和下方连接构件19。
65.上段支架11可连接到设置在上侧的上方大腿支架92。上段支架11可通过旋转轴13可旋转地连接到下段支架12。上段支架11可包括第一上方中空部11a和第二上方中空部11b。
66.下段支架12可连接到设置在下侧的下方大腿支架93。下段支架12可通过旋转轴13可旋转地连接到上段支架11。
67.旋转轴13可旋转地连接上段支架11和下段支架12。例如,旋转轴13可以是穿过上段支架11和下段支架12中的一个分段支架并插入另一分段支架的杆。例如,旋转轴13可以是与上段支架11和下段支架12中的一个分段支架一体设置并朝向另一分段支架突出的杆。旋转轴13可设置为与作为上方大腿支架92的旋转轴线的第二轴线a2平行。
68.旋转轴13可相对于作为髋关节致动器91的驱动轴线的第一轴线a1以90度布置。这里,以90度布置可指示与作为髋关节致动器91的驱动轴线的第一轴线a1平行的虚拟辅助线垂直于旋转轴13。在该结构中,可防止在髋关节致动器91的动力传递到下方大腿支架93的同时运动支架1由髋关节致动器91引起的变形并减少动力损失。
69.行走辅助装置可通过髋关节致动器91实现绕着第一轴线a1的运动,可实现连接到髋关节致动器91的上方大腿支架92的旋转运动以便绕着第二轴线a2旋转,并且可实现连接到髋关节致动器91的下段支架12的旋转运动以便绕着上段支架11旋转。
70.弹性体14可辅助运动支架1保持直线的基本形状。弹性体14的一个端部可固定到上段支架11,并且弹性体14的另一端部可固定到下段支架12。例如,弹性体14的一个端部可被容纳在上段支架11的第一上方中空部11a中并固定到上段支架11的内壁,并且弹性体14的另一端部可被容纳在下段支架12的第一下方中空部12a中并固定到下段支架12的内壁。弹性体14可以是弹簧。在下段支架12绕着旋转轴13相对于上段支架11顺时针方向旋转的同时,弹性体14中储存的弹性能可逐渐增加。
71.弹性体14的中心部分可包围旋转轴13。即使当弹性体14的端部与上段支架11和/或下段支架12分离时,弹性体14也可稳定地悬挂在旋转轴13上。
72.止动件15可限制上段支架11和下段支架12的旋转角度。在图6的示例中,止动件15可防止下段支架12相对于上段支架11沿逆时针方向旋转。止动件15可辅助下段支架12仅沿
向内方向旋转。
73.止动件15可从上段支架11和下段支架12中的一个分段支架朝向另一分段支架延伸。在图5和图6中,示出了止动件15从下段支架12延伸并被容纳在上段支架11的第一上方中空部11a中的示例。然而,示例不限于此。
74.在一些其他示例实施例中,除了与运动支架1的旋转轴13相关联的弹性体14之外,第二轴线a2的旋转轴可具有与其相关联的用于以下操作的弹性体:在上方大腿支架92被大腿绕着第二轴线a2向外(即,沿逆时针方向)推动时,沿顺时针方向朝向用户的大腿推上方大腿支架92。
75.如上所述,运动支架1可与上方大腿支架92和下方大腿支架93设置为一体,或者可从上方大腿支架92和下方大腿支架93拆卸。在下文中,基于运动支架1可从上方大腿支架92和下方大腿支架93拆卸的示例,将详细描述可拆卸结构。
76.上方连接构件17可将上段支架11连接到上方大腿支架92。上方连接构件17的一部分可被容纳在上段支架11中,并且上方连接构件17的另一部分可被插入到上方大腿支架92中。上方连接构件17可包括连接孔7a。上方连接构件17可被容纳在第二上方中空部11b中并由弹性体支撑。
77.按钮18可连接到上方连接构件17的一侧,使得按钮18的至少一部分可朝向上段支架11的外侧突出。用户可推动按钮18以推动上方连接构件17。
78.上方大腿支架92可包括将被插入到上方连接构件17的连接孔7a中的突出部(未示出)。在通过推动按钮18来推动上方连接构件17的同时,用户可将上方连接构件17插入上方大腿支架92中,然后释放按钮18。在该示例中,上方连接构件17可返回到其原始位置,并且设置在上方大腿支架92中的突出部可被插入到上方连接构件17的连接孔7a中。
79.下方连接构件19可包括功能与上方大腿支架92的突出部类似的突出部(未示出),并且下方大腿支架93可包括与上方连接构件17和按钮18相应的元件。
80.然而,用于将运动支架1从上方大腿支架92和/或下方大腿支架93分离的结构不限于此。
81.图7示出穿戴根据至少一个示例实施例的行走辅助装置的用户,图8是示出根据至少一个示例实施例的运动支架的侧视图,并且图9是示出图8的运动支架的变形的截面图。
82.参照图7至图9,行走辅助装置200可基于用户的大腿形状而变形。例如,行走辅助装置200可紧密地贴合具有相对较细的大腿的用户,并且还可紧密地贴合具有相对较粗的大腿的用户。
83.行走辅助装置200可包括腰部可穿戴部分90、髋关节致动器91、上方大腿支架92、运动支架2、下方大腿支架93和大腿可穿戴部分94。
84.可提供多个运动支架2。例如,多个运动支架2可包括彼此串联连接的第一运动支架21、第二运动支架22和第三运动支架23。多个运动支架2均可包括多个片段支架。多个运动支架2可被连接以便相对于彼此旋转。多个运动支架2的旋转可使得行走辅助装置200紧密地贴合用户的大腿,而不管用户的大腿形状如何。在下文中,将基于第一运动支架21描述多个分段支架。然而,第一运动支架21的多个片段支架可被应用于第二运动支架22和/或第三运动支架23。
85.第一运动支架21可包括以五边形形式连接的第一段支架211、第二段支架212、第
三段支架213、第四段支架214和第五段支架215。
86.第一段支架211、第二段支架212、第三段支架213、第四段支架214和第五段支架215均可铰接到相邻的分段支架。第一段支架211可与上方大腿支架92和/或下方大腿支架93对准。第二段支架212可以可旋转地连接到第一段支架211的上端,并且第三段支架213可以可旋转地连接到第一段支架211的下端。第四段支架214可以可旋转地连接到第二段支架212,并且第五段支架215可以可旋转地连接到第三段支架213和第四段支架214。
87.第一运动支架21还可包括弹性体218,其中,弹性体218的一端固定到第四段支架214,另一端固定到第五段支架215。弹性体218可被设置在第四段支架214和第五段支架215的内侧。如果第四节支架214与第五节支架215之间的角度增大,则弹性体218中储存的弹性能可增大。
88.第一运动支架21还可包括第一止动件216和第二止动件217,其中,第一止动件216被构造为限制第二段支架212和第四段支架214的旋转角度,第二止动件217被构造为限制第三段支架213和第五段支架215的旋转角度。第一止动件216可固定到第二段支架212的端部并接触第四段支架214的外侧。第二止动件217可固定到第三段支架213的端部并接触第五段支架215的外侧。
89.第二段支架212可与上方大腿支架92设置为一体,或者可拆卸地连接到上方大腿支架92。第三段支架213可与下方大腿支架93设置为一体,或者可拆卸地连接到下方大腿支架93。例如,第一连接构件291可被插入到上方大腿支架92中。第一连接构件291可被设置在上方大腿支架92中,并且第二连接构件292可被设置在下方大腿支架93中。
90.第一运动支架21可被布置在上方大腿支架92与下方大腿支架93之间,其中,除第一运动支架21之外的运动支架可并排串联连接。例如,第二运动支架22和第三运动支架23可在第一运动支架21下方并排连接。在该示例中,设置在第一运动支架21的底部上的第二连接构件292可连接到第二运动支架22。第二运动支架22或第三运动支架23可包括第三连接构件293。第四连接构件294可被设置在第三运动支架23的底部上并且可拆卸地连接到下方大腿支架93。
91.第二运动支架22可包括以五边形形式连接的第一段支架221、第二段支架222、第三段支架223、第四段支架224和第五段支架225、第一止动件226和第二止动件227、以及弹性体228。第三运动支架23可包括以五边形形式连接的第一段支架231、第二段支架232、第三段支架233、第四段支架234和第五段支架235、第一止动件236和第二止动件237、以及弹性体238。
92.例如,第一连接构件291可被设置在第一运动支架21的第二段支架212中,并且可拆卸地连接到上方大腿支架92。详细地讲,可拆卸地连接第一运动支架21和第二运动支架22的第二连接构件292可被设置在第一运动支架21的第三段支架213和/或第二运动支架22的第二段支架222中。可拆卸地连接第二运动支架22和第三运动支架23的第三连接构件293可被设置在第二运动支架22的第三段支架223和/或第三运动支架23的第二段支架232中。第四连接构件294可被设置在第三运动支架23的第三段支架233中,并且可拆卸地连接到下方大腿支架93。可基于用户的选择来确定运动支架21、运动支架22和运动支架23的数量。例如,对于具有相对较长的大腿的用户,可增加运动支架的数量。
93.在一些其他示例实施例中,运动支架可以是包括支撑支架和滑动支架的滑动组
件,其中,滑动支架被构造为在运动支架中的容纳空间内相对于运动支架移动,以补偿与用户高度差相应的长度。
94.图10是示出根据至少一个示例实施例的运动支架的前视图,图11是沿着图10的线xi-xi截取的截面图,以及图12是示出图11的运动支架的变形的截面图。
95.参照图10至图12,可提供多个运动支架3。例如,运动支架3可包括彼此串联连接的第一运动支架31、第二运动支架32和第三运动支架33。
96.第一运动支架31可包括第一支架主体311以及一个或更多个第一磁体312和313。
97.第一支架主体311可以可旋转地连接到上方大腿支架92(参见图7)和第二运动支架32。第一支架主体311可包括形成在面向上方大腿支架92(参见图7)的端部处的第一上方圆形部311a和形成在面向第二运动支架32的端部处的第一下方圆形部311b。第一圆形部311a和311b可减小设置在第一运动支架31中的磁体与设置在上方大腿支架92(参见图7)和/或第二运动支架32中的磁体之间的最小距离。
98.一个或更多个第一磁体312和313可被容纳在第一支架主体311中。这里,可设置两个第一磁体312和313,具体地,第一上方磁体312和第一下方磁体313。然而,示例不限于此。例如,可在第一支架主体311中设置单个第一磁体或者三个或更多个磁体。
99.例如,第一上方磁体312可面向被设置在上方大腿支架92中的具有相反极性的磁体(未示出)。设置在上方大腿支架92中的磁体(未示出)与第一上方磁体312之间的吸力可辅助第一运动支架31相对于上方大腿支架92保持直线的形状。此外,即使当上方大腿支架92和第一运动支架31之间的角度基于用户的身体形状而改变时,吸力也可辅助第一运动支架31紧密地贴合用户的身体。
100.第二运动支架32可包括第二支架主体321以及一个或更多个第二磁体322和323。第二支架主体321可以可旋转地连接到第一运动支架31和第三运动支架33,其中,第二支架主体321可绕着旋转轴391旋转。第二支架主体321可包括形成在面向第一运动支架31的端部处的第二上方圆形部321a以及形成在面向第三运动支架33的端部处的第二下方圆形部321b。第二圆形部321a和321b可减小设置在第二运动支架32中的磁体与设置在第一运动支架31和/或第二运动支架32中的磁体之间的最小距离。
101.一个或更多个第二磁体322和323可被容纳在第二支架主体321中。第二上方磁体322可面向容纳在第一运动支架31中的具有相反极性的第一下方磁体313。第二下方磁体323可面向容纳在第三运动支架33中的具有相反极性的第三上方磁体332。下面将进一步描述第三运动支架33。
102.第一下方磁体313与第二上方磁体322之间的吸力以及/或者第二下方磁体323与第三上方磁体332之间的吸力可辅助运动支架3保持直线的形状。即使当运动支架3的角度基于用户的身体形状而改变时,一个或更多个第二磁体322和323也可辅助运动支架3紧密地贴合用户的身体。
103.第三运动支架33可包括第三支架主体331以及一个或更多个第三磁体332和333。
104.第三支架主体331可以可旋转地连接到第二运动支架32和下方大腿支架93(参见图7),其中,第三支架主体331可绕着旋转轴392旋转。第三支架主体331可包括第三上方圆形部331a和第三下方圆形部331b。
105.一个或更多个第三磁体332和333可被容纳在第三支架主体331中。例如,第三上方
磁体332可面向具有相反极性的第二下方磁体323。设置在下方大腿支架93中的磁体(未示出)和第三下方磁体333可以以相反的极性相面对。即使当运动支架3的角度基于用户的身体形状而改变时,一个或更多个第三磁体332和333也可辅助运动支架3紧密地贴合用户的身体。
106.在一些实例实施例中,磁体312、磁体313、磁体322、磁体323、磁体332、磁体333可以是被构造为响应于向其提供的电流而选择性地创建磁场的电磁体。例如,行走辅助装置可包括控制器(未示出),其中,控制器被构造为确定是否存在状况并且基于该状况选择性地创建磁场和/或改变磁场的强度。例如,当用户的行走速度增加时,控制器可增加磁场以增加运动支架3的刚度。
107.控制器(未示出)可包括处理电路,包括但不限于中央处理器(cpu)、算术逻辑单元(alu)、数字信号处理器、微计算机、现场可编程门阵列(fpga)、可编程逻辑单元、微处理器、专用集成电路(asic)等。处理电路可以是调节磁场以控制运动支架3的刚度的专用处理电路。此外,在一些示例实施例中,处理电路还可控制髋关节致动器91以向用户提供辅助扭矩。
108.上面已经描述了多个示例实施例。然而,应当理解的是,可对这些示例实施例进行各种修改。例如,如果以不同的顺序执行所描述的技术以及/或者如果所描述的系统、架构、装置或电路中的组件以不同的方式被组合和/或被其他组件或他们的等同物替换或补充,则可实现适当的结果。因此,其他实施方式在所附权利要求的范围内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1