用于医疗装置柄部的缆线布线和组件的制作方法
用于医疗装置柄部的缆线布线和组件
1.相关申请的交叉引用
2.本技术要求于2019年11月27日提交的美国临时申请62/941,435的优先权,该美国临时申请的全部公开内容出于所有目的以引用方式并入本文。
3.以下申请出于所有目的以引用方式并入本文:wo2018/017717、wo2018/182836a1和pct/us2019/047930。
4.以引用方式并入
5.本说明书中提及的所有出版物和专利申请以引用方式并入本文,其引用程度如同明确且独立地指明每个单独的出版物或专利申请是以引用方式并入的。
背景技术:
6.诸如成像导管的医疗装置可包括延伸穿过其的柔性缆线束,该柔性缆线束可能易受在某些频率下沿着缆线线路的噪声的影响。可能需要缆线所延伸穿过的缆线布线和柄部组件来减少缆线中的噪声。
技术实现要素:
7.本公开的一个方面是一种医疗装置,该医疗装置包括细长轴,该细长轴尺寸设定成且被构造成在患者内被推进。医疗装置可包括柄部,该柄部尺寸设定成且定位成保持在患者的外部;以及柔性的细长缆线束,该柔性的细长缆线束延伸穿过细长轴并进入柄部中。在柄部内,缆线束的一个或多个屏蔽层可以在缆线束的其余部分穿过设置在柄部内的电噪声抑制构件之前从缆线束移除。
8.在该实施方案中,医疗装置可包括超声换能器,该超声换能器与柔性缆线束连通,任选地其中超声换能器设置在医疗装置的远侧末端中,并且任选地其中超声换能器用于医学成像。医疗装置也可以与其它能量模态一起使用。
9.在该方面中,电噪声抑制构件可任选地包括铁氧体珠粒。
10.在该方面中,柔性缆线束可以在柄部内的折叠区域中以有组织的方式折叠在其自身上,并且其中屏蔽层可以在折叠区域之前已经从缆线束移除,使得屏蔽层不折叠在柄部内。
11.在该方面中,柔性缆线束可以在折叠区域中以手风琴样式折叠在其自身上。
12.在该方面中,屏蔽层可联接到柄部的近侧端部处的容座。
13.在该方面中,任选地在从主缆线束主体中成扇形散开之后,缆线束可以联接到固定在柄部内的多个印刷电路板。
14.在该方面中,缆线束可以从设置在柄部内的细长轴的近侧端部延伸。
15.在该方面中,缆线束可以通过设置在柄部内的多个印刷电路板并且在该多个印刷电路板的外部径向地延伸。
16.在该方面中,缆线束在设置在柄部内的多个印刷电路板中的第一印刷电路板与第二印刷电路板之间通过。
17.在该方面中,缆线束可包括可移动部分,该可移动部分能够在柄部内轴向移动。
18.在该方面中,缆线束可能不适于在组装柄部之后在柄部内轴向移动。
19.在该方面中,电噪声抑制构件可包括适于抑制来自细长缆线束的电磁干扰的材料或构型中的一者或两者。
20.在该方面中,电噪声抑制构件可包括用于抑制电磁干扰进入细长缆线束中的材料或构型中的一者或两者。
21.本公开的一个方面是一种医疗装置,该医疗装置包括细长轴,该细长轴尺寸设定成且被构造成在患者内被推进。医疗装置可包括柄部,该柄部尺寸设定成且定位成保持在患者的外部;以及柔性的细长缆线束,该柔性的细长缆线束延伸穿过细长轴并进入柄部中。
22.在该方面中,柔性的细长缆线束可以在柄部内的折叠区域中以有组织的方式折叠在其自身上,并且其中缆线束的屏蔽层在折叠区域之前从缆线束移除,使得屏蔽层不折叠在折叠区域中。
23.该方面可包括本文阐述的任何其它合适的部件、特征部或功能性,包括在本发明内容部分中的任何其它方面的任何其它特征部。
24.在该方面中,医疗装置可包括超声换能器,该超声换能器与柔性缆线束连通,任选地其中超声换能器设置在医疗装置的远侧末端中,并且任选地其中超声换能器用于医学成像。
附图说明
25.图1a示出了包括转向和医疗装置的系统的示例性实施方案。
26.图1b示出了图1a的医疗装置的转向和装置部分的横截面a-a。
27.图2示出了包括具有多个致动器的柄部组件、可转向护套以及医疗工具的示例性系统。
28.图3ai、图3aii和图3aiii示出了具有拉线的示例性可转向轴。
29.图3bi和图3bii示出了具有拉线的示例性可转向轴。
30.图3ci和图3cii示出了具有拉线的示例性可转向轴。
31.图3di至图3diiii示出了具有拉线的示例性可转向轴。
32.图3e示出了具有周向交织到轴的编织线中的一根或多根拉线的示例性可转向轴。
33.图4示出了包括束的示例性系统的示例性部分。
34.图5示出了医疗工具的示例性近侧端部,该工具包括延伸到近侧连接器中的导体束,印刷电路板(pcb)容纳在该近侧连接器内。
35.图6a示出了包括柔性电路条的示例性医疗工具的一部分。
36.图6b示出了条的示例性近侧部分。
37.图6c示出了条的示例性近侧部分的详细视图。
38.图6d示出了示例性挠性条的端视图。
39.图6e示出了挠性条的示例性叠堆。
40.图6f示出了挠性条以及接地条和屏蔽条的示例性叠堆。
41.图6g示出了示例性束,该束包括围绕条以及屏蔽条和接地条的管材材料。
42.图7示出了可转向护套和医疗工具的集成系统,其中该系统经由连接器缆线连接
到控制台。
43.图8a和图8b示出了可与本文的内部细长主体和外部细长主体或轴中的任一者一起使用的示例性柄部组件。
44.图9a示出了示例性内部细长主体或内轴的一部分。
45.图9b示出了示例性外部细长主体或外轴的一部分。
46.图9c示出了包括图9a和图9b的细长主体(或轴)的示例性医疗装置的一部分。
47.图9d示出了图9c的可偏转部分中的装置的剖面。
48.图10a示出了示例性柄部组件的一部分。
49.图10b为示出了示例性外部细长主体(或外轴)移动子组件的分解图。
50.图10c示出了来自图57a的柄部组件的侧面剖视图。
51.图11示出了包括用于第一致动器和第二致动器的旋转指示器的示例性柄部组件。
52.图12a示出了包括张紧构件或展平构件的示例性柄部组件的内部部件。
53.图12b示出了(在侧视图中)包括张紧构件或展平构件的示例性柄部组件的内部部件。
54.图12c示出了(在相对于图12b的另一侧的侧视图中)包括张紧构件或展平构件的示例性柄部组件的内部部件。
55.图12d示出了示例性柄部壳体的内部部件,该内部部件包括被定位成有助于稳定柄部组件中的张紧构件的一个或多个引导特征部。
56.图12e示出了示例性柄部壳体的侧视图。
57.图12f示出了示例性柄部壳体的侧视图。
58.图13a示出了至少一部分相对于长轴扭转的示例性柔性缆线束。
59.图13b示出了至少一部分相对于长轴扭转的示例性柔性缆线束。
60.图13c示出了至少一部分相对于长轴扭转的示例性柔性缆线束。
61.图13d示出了至少一部分相对于长轴扭转的示例性柔性缆线束。
62.图13e示出了来自图13d的细节。
63.图14a和图14b示出了示例性柄部,该示例性柄部包括在束穿过铁氧体珠粒之前被移除的缆线束屏蔽层。
64.图15示出了示例性柄部,该示例性柄部包括在束穿过铁氧体珠粒之前被移除的缆线束屏蔽层。
65.图16示出了示例性柄部,该示例性柄部包括在束穿过铁氧体珠粒之前被移除的缆线束屏蔽层。
66.图17示出了缆线布线的示例性示意图。
67.图18示出了示例性柄部,该示例性柄部包括在束穿过铁氧体珠粒之前被移除的缆线束屏蔽层。
68.图19示出了在医疗装置的柄部内的柔性缆线折叠。
69.图20示出了示例性柄部,该示例性柄部包括在束穿过铁氧体珠粒之前被移除的缆线束屏蔽层。
具体实施方式
70.本文的公开内容涉及被构造成且适于改善发射和/或抗扰性能的医疗装置的缆线布线和柄部组件。图1至图13e和其文本描述示出了成像装置、系统和使用方法的示例性特征部,该成像装置、系统和使用方法中的任一者可结合到本文关于图14a至图20所阐述的缆线布线概念中。
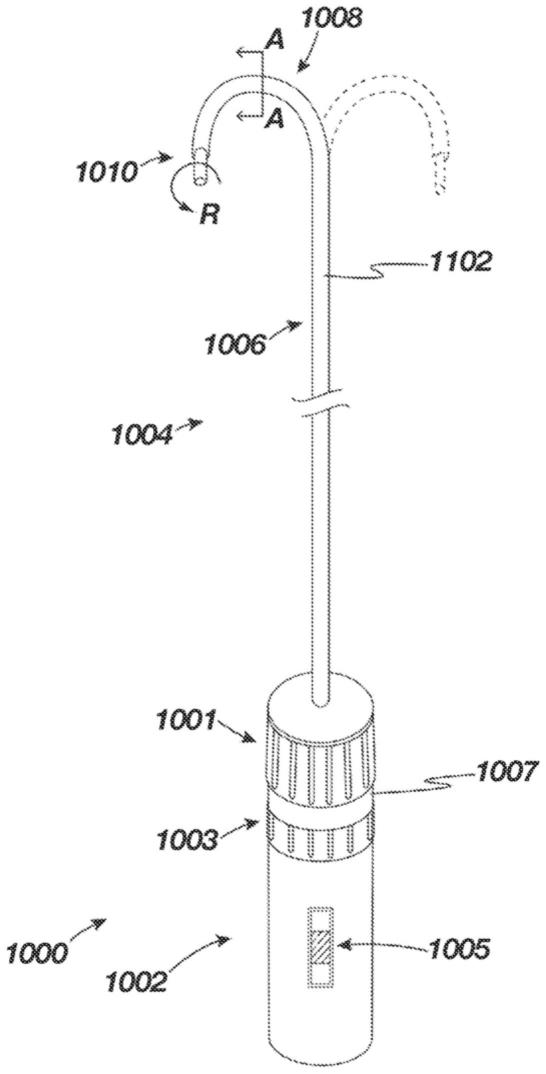
71.图1a示出了集成转向和医疗装置的系统的示例性实施方案。系统1000包括柄部组件1002以及转向和医疗装置部分1004。转向和医疗装置部分1004包括近侧部分1006和可转向部分1008。该系统适于使得柄部组件1002可被致动以引起可转向部分1008的转向,并且任选地可被进一步致动以引起医疗装置1010相对于转向和医疗装置部分1004的移动。在该示例性实施方案中,柄部组件1002包括第一致动器1001、第二致动器1003和第三致动器1005。第一致动器1001适于相对于柄部主体1007致动(在该示例中,旋转),以引起可转向部分1008的转向,并且具体地讲,使外部护套1102转向。在该实施方案中,可转向部分1008可转向或弯曲到在图1a中以实线示出的构型,并且也可转向到以虚线示出的构型,或其间的任何地方,并且在一些实施方案中,相反的转向功能被限制为仅仅使轴从初始弯曲构型(诸如图1a中的实线弯曲构型)拉直。本公开中的术语“转向”意指任选地经由至少一根拉线的致动而偏转或弯曲,但在一些情况下,该术语可包括轴旋转(扭转)和轴向移动。本文中的术语“拉线”是指可将张力从装置的近侧端部传输到远侧端部区域的任何元件。拉线可由实心或绞合/编织的金属线(诸如不锈钢或镍钛)构成,或者其可由优选地绞合/编织的聚合物(诸如芳族聚酰胺纤维聚乙烯、ptfe、eptfe等)构成,但也可为单丝形式。在优选的实施方案中,拉线由芳族聚酰胺纤维束构成,该芳族聚酰胺纤维束具有以高的每英寸纬数编织在一起的四根50旦尼尔复丝(大约25根细丝)线。线的横截面直径通常在0.005"至0.012"的范围内,更优选地为0.008"至0.010",但编织或绞合线可在装置管腔中变平或椭圆化。据信,优选的构造实施方案为将轴直径保持为最小所需的尺寸提供优化的强度和耐磨性。任选的第二致动器1003适于相对于柄部主体1007致动(在该示例中,旋转)以引起医疗工具1010相对于轴1102的旋转(标记为旋转移动“r”),并且任选的致动器1005适于相对于柄部主体1007(在该示例中,轴向地)致动以引起医疗装置1010相对于外部护套1102的轴向(远侧-近侧)移动。近侧部分1006不被构造成当可转向部分1008转向(弯曲/偏转)时显著弯曲,但近侧部分可挠曲和弯曲以适形于其中使用该近侧部分的解剖结构。在许多实施方案中,这通过由比近侧部分1006软或刚性小的材料和/或复合构造来构造可转向部分1008来实现。
72.图1a所示的实施方案是包括集成柄部组件的设备的示例,该集成柄部组件与可转向外轴和内部医疗工具两者能够操作地连通。柄部组件被集成是因为其被组装并且构造成在封装和使用之前与外轴和内部医疗工具能够操作地连通。术语“集成”在集成柄部组件的上下文中使用时是指柄部组件,其中在医疗工具可从外轴内移除之前,柄部组件的至少一部分必须被断裂或分开。
73.图1b示出转向和装置部分1004的,并且具体地讲在可转向部分1008中的示例性横截面a-a(示于图1a中)。在该实施方案中,医疗装置1010尺寸设定成且被构造成设置在可转向护套内。可转向护套包括外轴1102和一组拉线1104,它们轴向固定在可转向部分1008的远侧区域中。
74.图1a和图1b中的医疗工具可以是例如本文的任何医疗工具,诸如超声工具。当本文使用“超声探头”时,其通常是指细长工具,该细长工具包括至少一个超声换能器以及将至少一个超声换能器电连接到细长工具的近侧区域的一个或多个导电元件。超声探头的近侧区域包括或被修改为包括至少一个近侧触点,该至少一个近侧触点与至少一个超声换能器电连通,并且可任选地经由附接到另一个装置、缆线或连接器上的电触点而被置于与另一个装置、缆线或连接器上的电触点电连通。
75.图2示出了适于与图1a和图1b中的系统类似地起作用的示例性系统10,并且还示出了柄部组件12的示例性内部部件(内部部件被示出为虚线)。柄部组件12与外部可转向轴20和医疗工具30集成并能够操作地连通。柄部组件12包括致动器14,该致动器适于在相对于柄部主体15致动时引起可转向轴20的转向。致动器14经由设置在柄部组件12中的转向控件16与可转向轴20能够操作地连通。医疗工具30包括设置在柄部组件12内并结合到该柄部组件中的近侧部分18。致动器13与医疗工具30能够操作地连通,并且致动器13相对于柄部主体15的致动(在该示例中,旋转)经由旋转控件1215引起医疗工具30相对于外轴20的旋转。任选的第三致动器17还与医疗工具30能够操作地连通,并且在该实施方案中适于被轴向地(相对于柄部主体15)致动,以经由轴向控件1217引起医疗工具30相对于外部可转向轴20的轴向移动。
76.图2中的医疗工具可以是例如本文的任何医疗工具,诸如超声工具。
77.图3a至图3e表示系统1200中的可转向护套1202的护套部分1208的远侧区域的示例性实施方案。为简单起见,所示横截面仅示出外部护套1208而不示出内部工具1212。外部护套1208优选地具有复合构造,以改善从近侧端部施加到轴外部的扭矩传递,或抵抗从轴内(诸如从工具1212)施加到其上的扭矩力。如图3ai至图3aiii所示,为了形成复合物,优选地由金属线(圆形、成对圆形或带状)和/或多根纤维(例如,芳族聚酰胺或尼龙)形成的多个编织元件1250可直接编织在薄壁(例如,0.0010"
±
0.0005")润滑衬里管1251(诸如ptfe或fep材料)上方。热塑性聚合物1252(诸如硬度在25d至72d范围内的pebax,或尼龙,或其他常见导管材料)可使用热收缩管材(诸如fep)通过热量而被层压,以使聚合物在编织元件1250和衬里管1251上方回流以形成均匀构件。热塑性聚合物1252还可具有不透射线的化合物,该化合物包括诸如铋、硫酸钡或钨之类的材料,以便在荧光镜透视检查下护套的末端对用户可见。在图3ai至图3aiii的实施方案中,拉线1104优选地平行于护套的可转向(可偏转)部分1222中的中心通路,并且还优选地设置在可转向护套1208的壁内形成的管腔1253中。该管腔可在热塑性聚合物管材挤出过程期间或在轴热层压熔合过程期间借助于可移除的心轴形成。拉线管腔1253可进一步通过将优选地由可移除的心轴暂时支撑的拉线管1254结合在壁内而形成。在熔合过程期间,可移除的心轴也可放置在拉线1104或1104'旁边,从而产生一定程度地椭圆化的管腔1253,在该管腔内可允许纤维拉线变平,从而为拉线的自由移动留出空间。管1254可包含ptfe、fep、聚酰亚胺或在最高大约500℉的热层压过程期间维持其壁完整性的另一种材料。该管优选地由热塑性聚合物1252包围和支撑,该热塑性聚合物优选地抵靠管热层压。在另一个实施方案中,拉线管腔(优选地包括拉线管)结合在编织元件1250的编织物内。例如,沿一个方向延伸的编织元件1250将在拉线管腔下方经过,而沿相反方向延伸的那些编织元件将在拉线管腔上方经过。编织增强在导管操纵期间提供尺寸上更稳定的管腔,并且还有助于根据需要确保管腔的平直度。在可转向部分近侧,拉线可在
外部护套1208的同一侧上平行于中心轴线朝近侧延续,诸如图3ai至图3aiii所示。在该实施方案和随后的其他实施方案中,可能需要在护套1208的壁内布线的附加拉线管腔内的附加拉线1104'向上穿过可转向部分1222,以拉直装置的可转向部分。该拉直拉线1104'优选地在与用于在可转向部分1222中转向(偏转)的拉线1104相对的一侧上在可转向部分1222内布线。在另一个实施方案(未示出)中,可使用两个管腔和两根拉直拉线1104',基本上使成对的拉线1104构型成镜像。这些拉直的线还可被构造成通过在柄部内张紧较大的距离(超过刚刚拉直)而允许在相反方向上偏转。
78.在使用期间,可迫使远侧导管的刚好在可转向(可偏转)部分1222近侧的部分1223基于其所用的解剖结构的约束而适形于曲线。对于将装置从腹股沟通路推进到心室中的具体实施方案,预计被迫成为曲线的部分1223的长度在5cm至25cm的范围内。在护套轴1208从近侧端部旋转期间,扭矩通过该远侧弯曲区域1223传递到导管末端。该区域1223中的装置的不均匀的横截面和/或张力可引起轴积聚并突然释放扭矩的趋势,从而在扭转时引起旋转的“抖动”或突然的抽动。为了使抖动的可能性最小化,任选的是将拉线张力和构造材料分布在弯曲区域1223的表面周围。在一个实施方案中,诸如图3bi至图3biii所示,拉线1104可在部分1222近侧的至少弯曲区域1223中围绕护套的中心轴线螺旋。该实施方案的拉线可在大约10cm的长度内形成完整的周向缠绕,其中该值在5cm至15cm的范围内。螺旋可仅需要存在于弯曲区域1223中,此后通过近侧部分1224(类似于1006)朝近侧继续拉直,这可使拉线管腔中的摩擦和使可转向部分1222转向(偏转)所需的相关联拉线力最小化。在继续拉直之前,螺旋还可进行最少一圈,或者使轴的整个长度螺旋。在使抖动最小化的另一个实施方案中,可能仅需要将拉线张力分布到轴的相对侧。如图3ci至图3cii所示,利用彼此相邻地定位在护套1208的同一侧上的两根平行拉线1104来实现可转向节段1222的偏转。在可转向节段1222近侧的弯曲区域1223和近侧部分1224(类似于1006)中,拉线被布线到轴的相对侧,每一侧与可转向节段1222中的位置成90
°
,以更均匀地分布张力。虽然优选的是利用柄部致动器以相等的力同时致动两根平行拉线,但在其他实施方案中,当用相等的力致动两根平行拉线时,可施加不同的力以将末端转向到所形成的平面的一侧或另一侧。在其他实施方案中,任何多根拉线能够以如图3b或图3c所示的相同构型布线,其中多根近侧拉线围绕轴圆周均匀地分布。另外,如图3ci至图3cii所示,拉线1104可在轴近侧部分1124长度的大部分内沿着轴的相对侧朝近侧布线,但优选地在轴的近侧端部部分附近彼此相邻地一起拉回,以允许线一起离开近侧轴的同一侧,以便于将它们一起固定到柄部部件以用于同时致动张力。
79.图3di至图3div示出了导管的远侧区域的另一个实施方案,该导管的构造类似于先前所述的构造,但替代地被构造成提供可偏转到两个不同方向的远侧可转向部分1222。如图所示,两对拉线1105/1107和1106/1108沿着近侧轴区域1224和弯曲区域1223。这类似于图3ai至图3aiii,不同的是线在轴的每一侧上成对。布线也可以如图3bi至图3bii中那样螺旋,或者是所讨论的其他构型。在远侧可转向部分1222内,线被布线成与近侧部分成90
°
,但也可以设想其他角度。在1222内的结合部1225处,拉线(例如,1105和1107)中的一者或多者可终止并锚定到轴,其中剩余的拉线(例如,1106和1108)继续到它们锚定的更远侧末端位置1226。该构型允许在1225和1226处终止的拉线的独立致动,使得在致动期间可形成不同的形状。图3dii示出了被张紧以在相同方向上形成可变曲线的线1107和1108两者。图
3diii示出了被张紧以形成“s”曲线的线1107和1106。其他构型也是可能的。
80.拉线(诸如1104和1104')必须以将它们牢靠地附连到远侧可转向轴部分1222的壁的方式在它们的远侧端部处终止,使得它们在反复施加张力下不断裂或无牵拉。在图3e所示的优选的实施方案中,拉线1104和1104'在离开远侧拉线管腔1253时周向交织到远侧轴1222的编织线1250(示出为不具有热塑性聚合物1252)中。拉线1104或1104'中的一者或多者还可另外或替代地缠绕和/或系在编织线1250的外部周围以用于附加固定。然后可在固定点的远侧修剪编织线1250,其中交织和/或缠绕的拉线防止编织线膨胀和/或散开。还可使用诸如uv固化或氰基丙烯酸酯之类的附加粘合剂来将拉线固定到编织线。然后将拉线和编织线的编织物和/或缠绕物与热塑性聚合物层压,该热塑性聚合物在线周围的空间内熔融并冷却以将线固定在适当位置。热塑性聚合物还可具有不透射线的化合物,该化合物包括诸如铋、硫酸钡或钨之类的材料,以便在荧光镜透视检查下护套的末端对用户可见。
81.在附加的实施方案中,工具1212还可或另选地被构造成具有一根或多根拉线,以使末端以类似于针对外部护套1208描述的前述实施方案中的任一个实施方案的方式偏转。除了在工具1212的管状构件的壁内对拉线进行布线之外,拉线还可在管状元件1212的管腔内的导体附近被布线。拉线的致动可来自位于近侧柄部1206中的致动器。工具1212的远侧轴还可形成为特定形状(例如,弧形),使得其在离开外部护套1208的可转向部分1222的末端时弯曲成该形状。工具1212的远侧轴的刚度使得其在内部时基本上不使外部护套1208变形,但在离开时允许该外部护套弯曲。该形状可通过以下手段中的任一者或组合来设定:对聚合物材料进行热定形,使用在轴1212的内部管腔内在或轴1212的壁内的管腔内的可移动或固定形状的管心针。这样的管心针的横截面可为圆形、椭圆形或矩形,并且由不锈钢、镍钛诺或刚性聚合物诸如peek、vestamid或类似物形成。外部可转向护套可另选地利用与上述类似的方法,在具有或不具有附加拉线偏转、以及具有或不具有工具轴1212的远侧部分的附加形状或偏转的情况下制成弯曲的。
82.本公开的一个方面包括将系统的至少一部分与其他部件分离的方法,任选地作为重新安置过程的一部分。在一些实施方案中,医疗工具包括联接到其他电触点的一个或多个电触点,该一个或多个电触点与能量控制台电连通,并且控制台的示例是超声领域已知的。
83.图4仅示出了示例性医疗工具的一部分,诸如超声探头,其可以直接或间接电联接到能量控制台,诸如超声控制台。
84.重新安置装置可涉及断开一个或多个近侧电触点,并且将工具部分朝远侧移出护套部分的远侧端部。在该实施方案中,工具部分1212包括至少工具外部护套或构件2010、远侧工作端部1821(其可包括至少一个超声换能器)和导体束2020。导体束2020从远侧工作端部1821延伸穿过工具外部构件2010到近侧连接器(为清楚起见,连接器和柄部机构在图18中未示出)。在一些实施方案中,医疗工具用于超声成像,任选地其中远侧工作端部1821包括安装在asic(专用集成电路)上的压电部件的二维(2d)阵列。
85.图5示出了医疗装置的仅示例性近侧端部(医疗装置在右侧示出),并且在该实施方案中,医疗装置是超声探头。医疗装置的近侧端部2015适于电联接到连接器缆线270,该连接器缆线适于直接或间接电联接到能量控制台,诸如超声能量控制台。如图5所示,柔性导体束2020从医疗工具的远侧区域(远侧区域未示出)延伸到近侧连接器2015中,刚性或柔
性印刷电路板(“pcb”)2030容纳在该近侧连接器内。连接器束2020包括附接到pcb板触点2031的多个触点2024(其示例在下文描述)。来自每个触点2031的每条单独迹线连接到pcb的另一部分上(任选地更靠近pcb)的单独暴露触点2050。单独pcb迹线还可以穿过pcb上的其他可用电路。暴露的触点2050被构造用于与配合连接器缆线2070上的类似触点2060机械配合以便导电,这在概念上类似于先前描述的近侧工具连接器1990,该近侧工具连接器将工具1204连接到用户接口控制台。近侧连接器2015可结合到本文的系统、柄部、可转向护套、医疗工具等中的任一者中。
86.除非本文有相反的说明,否则如本文中所使用的,术语“导体束”可与“柔性导体束”互换使用。
87.图6a和图6b示出了可包括在本文的导体束中的任一个导体束中的示例性导体条(在本文中也称为柔性电路条)2021。图6a和图6b中的实施方案是可包括在图4和图5的束2020中的导体条的示例。图6a和图6b中的实施方案可并入本文的任何其他系统中。
88.如图6a、图6b和图6g所示,导体束2020包括多个挠性电路条,包括多迹线条2021,以及用于接地的导电条2022和用于屏蔽的导电条2023(仅示出其一部分)。每个多迹线条包括多条导电迹线2025,这可在图6b、图6c和图6d中清楚地看到。图6d至图6g中的迹线2025的数量为十二,并且图6a至图6c中的迹线的数量为十六,并且它们两者关于可使用的迹线2025的数量均是示例性的。每个条2021可以是大约0.072"宽和0.0022"厚,并且可以任选地包括十六个0.0022"宽
×
约0.0007"厚的导电(例如,铜)迹线,各自间隔开大约0.0022"。迹线设置在绝缘衬底层2027上,诸如聚酰亚胺衬底,并且迹线可以被覆盖层2026至少部分地覆盖,诸如可光成像的膜覆盖(“pic”)层或其他干膜焊接掩膜(dfsm)或其他类似材料。覆盖层通常沿着束的大部分延伸,除非在近侧区域和远侧区域中的离散位置处,以便电联接。在其他实施方案中,条2021为大约0.055"宽并且包括十二条导电迹线(参见图6d至图6g)。在其他实施方案中,条2021为大约0.037"宽并且包括八条铜导电迹线。用于接地的外部条2022和用于屏蔽的外部条2023可具有类似的构造和尺寸,不同的是它们可包括单个全宽铜条。如针对2d压电阵列优化的,将需要大约七个16迹线条2021的叠堆(或者九个12迹线、或十四个8迹线),以及位于多迹线条的叠堆的每一侧上的条2022和2023中的每一者。图6e示出了具有堆叠在一起的九个条2021的示例性束2020的一部分。图6f示出了束的一部分,该束包括堆叠的九个条2021,以及接地条2022和屏蔽条2023(仅标记顶部的那些)。完整的束可任选地与(例如但不限于)约0.001"壁厚收缩管(诸如图6g中的管材2028)保持在一起。上文讨论的挠性电路尺寸和迹线的数量用于压电阵列(和/或其asic控制器)的特定构型,并且可根据针对特定应用而优化的阵列元件的数量和尺寸来改变。
89.每个挠性电路条的近侧端部具有通过在位置2024处移除覆盖层2026而暴露在大约例如3mm的长度上的导电材料(例如,镀金铜)。位置2024和本文所述的其他暴露位置通常称为“触点”。应当理解,当在该上下文中使用时,触点实际上包括多条分开的导电迹线(诸如区域位置中所示),每条导电迹线适于与其本身对应的导电元件电连通。因此,“触点”不限于意指两个导电元件之间的仅单个电连接件。虽然图6a示出了多个暴露区域2024,但图6a中的实施方案将首先在本文中描述为好像仅存在一个暴露区域(即,近侧端部处的区域2024)。条2021可被制成与用于pcb 2030上的导电迹线的配合暴露触点2031形成电连接,这在图6a至图6c中示出。在一些实施方案中,尺寸和间隔被设定成与多迹线条2021中的十六
条迹线配合的十六条单独迹线被设置在给定触点2031内。acf(各向异性导电膜)、焊接、导电粘合剂、机械连接或这些的任何组合可用于在条迹线和pcb触点之间实现合适的电连接(电联接)。
90.图7示出了可转向护套1202和医疗工具1204的集成系统1200,其中系统1200经由连接器缆线2070连接到控制台4000。如前所述,诸如对于图5,工具1204包括近侧连接器2015,该近侧连接器形成与缆线2070的配合连接。如前所述,期望重新安置(例如,再处理和再使用)系统1200。进一步期望确保系统仅由原始制造商而不是非附属第三方重新安置,并且确保装置仅重新使用指定的次数。为了控制重新安置过程,将密码认证芯片(密码芯片)结合到工具1204中,优选地结合在pcb 2030上,但也可设想其他位置,诸如可转向柄部1206内或末端3000内的位置。密码芯片只能由控制认证密钥的原始制造商编程。系统1200连接到的控制台4000具有可信平台模块(tpm),该可信平台模块也具有认证密钥。在系统1200的使用期间,控制台4000能够经由密码芯片认证系统1200,并且根据需要可向芯片读取和写入信息(例如,经由eeprom特征部)。在所讨论的任何场景中,rfid芯片(优选地为加密的)可用于在控制台、连接器和装置之间读取和传输数据。
91.如本文所用,“清洁”可指任何类型的清洁,诸如但不限于:使用清洁剂和/或消毒剂的冲洗系统来清洁外轴的内部,并且任选地用小刷子进行机械擦洗;用清洁剂/消毒剂机械清洁(例如,擦拭物、刷子)外轴的外部部分和/或医疗装置轴(例如,超声探头)的外部部分,并且任选地将轴浸没在清洁剂/消毒剂的超声浴中持续指定的时间段;以及光学清洁方法,诸如包括使用uv光。如本文所用,“清洁”不是指具体的清洁过程,而是指清洁物体的总理念。
92.本文的公开内容还包括组装或重新组装本文的子组件或组件中的任一者(包括本文的柄部组件中的任一个柄部组件内的子组件中的任一个子组件)的方法。例如但不限于,此处的公开内容包括将一根或多根拉线卷在主轴支撑件中的支承表面上方并且然后卷在主轴周围的方法。
93.本文的方法还包括制造或构造本文的子组件或组件中的任一者的任何单独部件。例如,本公开包括制造柄部壳部件的方法,该柄部壳部件具有可容纳允许本文的组件或子组件按预期起作用的内部部件的特定构型(例如,引导件、壁等)。
94.不管所标记的参考标号,本文的柄部组件、医疗工具、可转向护套和电连接件都可在系统中以彼此的任何组合一起使用。
95.以下美国专利参考文献中的任一者中的任何技术(包括超声和转向技术)都可以结合到本文的医疗工具、装置、系统或其使用方法中的任一者中,这些专利参考文献的公开内容以引用方式并入本文:6100626、6537217、6559389、7257051、7297118、7331927、7338450、7451650、7451650、7527591、7527592、7569015、7621028、7731516、7740584、7766833、7783339、7791252、7791252、7819802、7824335、7966058、8057397、8096951、8207652、8207652、8213693、8364242、8428690、8451155、8527032、8659212、8721553、8727993、8742646、8742646、8776335、8790262、8933613、8978216、8989842、9055883、9439625、9575165、9639056和20080287783。
96.以上任何合适的公开内容均可并入以下实施方案中的任一个实施方案中。例如,除非有相反的具体说明,否则装置、系统及制造和使用方法的各方面并入本文,并且可并入
以下实施方案中的任一个实施方案中。
97.图8a和图8b示出了可以与外轴131和内轴132能够操作地连通的仅示例性的柄部组件。在该示例性具体实施中,柄部组件120包括柄部主体123、第一致动器121和第二致动器122,该柄部主体具有可由用户抓握的外表面。致动器121可以与外轴131能够操作地连通,并且致动器122可以与内轴132能够操作地连通。致动器121适于相对于柄部主体123(并且相对于第二致动器122)旋转和轴向移动。这允许致动器121引起医疗工具103的轴向移动和医疗工具103相对于内轴132的远侧端部的旋转。第二致动器122适于相对于柄部主体123致动(例如,在该实施方案中为旋转),以引起内轴132的偏转。例如,柄部组件可具有内部部件,该内部部件与拉线的近侧端部交接,使得致动器122的致动张紧一根或多根拉线以引起内轴的偏转。在该实施方案中,致动器121位于致动器122的远侧,但在其他设计中,其相对位置可颠倒。图8b示出了致动器121已相对于其在图8a中的位置朝远侧推进之后的柄部组件120。该远侧推进引起外轴131朝远侧推进,并且因此引起医疗工具朝远侧推进。致动器121可类似地相对于其在图8b中的位置朝近侧回缩。下面进一步描述的张紧构件关于朝近侧回缩的致动器121来提及。
98.在其他设计中,致动器121可以与内轴能够操作地连通,并且致动器122可以与外轴能够操作地连通。
99.如本文所述,外轴可相对于可偏转的内轴轴向移动。外轴可由沿外轴的至少一部分的长度在刚度(例如,硬度)上变化的材料节段构成。例如,在第二部分远侧的第一部分可具有比第二部分低的硬度。由于外轴可相对于可偏转的内轴轴向移动,并且由于外轴的刚度可沿着其长度变化,因此可通过控制外轴的轴向位置(相对于内轴)来选择性地控制整个装置的偏转,包括程度(或量)。因此,外轴的轴向移动可选择性地控制装置的偏转。例如,用户(例如,医师)可通过相对于内轴轴向地移动外轴来改变或控制沿着装置的长度(从远侧端部测量)发生弯曲的位置。另外,例如,根据外轴相对于可偏转的内轴的相对位置,外轴中刚度变化的节段可允许或多或少的偏转。例如,与当内轴在外轴具有较小刚度的区域处偏转时相比,内轴在外轴具有相对较高刚度的区域处偏转可导致较小偏转。
100.图9c示出了示例性设备医疗设备130,该医疗设备包括细长内轴132(参见图9a)和细长外轴131(参见图9b)。医疗设备130在本文中也可称为“导管”或包括至少一个细长轴的其他医疗装置。
101.图9d示出了图9c中的组件中所示的剖面a-a,该组件为装置的可偏转节段中的节段。图9a至图9c的部件被类似地标记。如在图9d中可见,拉线111和112彼此非常接近并且与拉直拉线116成约180度。
102.还如图9d所示,细长内轴132包括两层编织材料119,并且拉线至少在该节段的位置处基本上夹在两层编织材料之间。环形空间118允许任选润滑剂的移动自由度和空间。内轴132可由例如但不限于聚合物材料诸如pebax制成,任选地具有润滑添加剂。内轴132可包括衬里125,诸如ptfe衬里。柔性缆线束105可由一层或多层绝缘体126(诸如ptfe绝缘体)围绕。外轴131可包含聚合物材料127,诸如pebax。外轴131还可包括径向内部衬里128,诸如ptfe衬里。拉线(例如,111、112、116)中的任一根拉线可设置在具有衬里诸如ptfe衬里129的管腔中。
103.医疗设备130(或细长轴132和细长轴131中的任一者,单独地)可与本文的柄部组
件中的任一个柄部组件(包括图8a和图8b所示的柄部组件120)能够操作地连通。
104.图10a至图10c和图11示出了可与本文的医疗装置中的任一个医疗装置(包括超声探头)能够操作地连通的附加示例性柄部组件。例如,图10a至图10c所示的示例性柄部组件可联接到(直接或间接地)图9a至图9d所示的医疗设备130并且与该医疗设备能够操作地连通。在具体实施方案中,细长外轴131和细长内轴132两者联接到图10a至图10c所示的柄部组件并与该柄部组件能够操作地连通。
105.图10a至图10c和图11中的柄部组件与图8a和图8bb中所示的柄部组件、单独部件和子组件具有一些相似性。除非有相反的说明,否则可结合到图10a至图10c中的柄部组件中的来自图8a和图8b的概念、特征部和使用方法出于所有目的据此以引用方式并入到图10a至图10c中所示和相对于图10a至图10c所述的柄部组件的公开内容中。相似地,可结合到本文的其他柄部组件中的图10a至图10c中所示和所述的概念、特征部和使用方法出于所有目的据此以引用方式并入到本文阐述的柄部组件中的任一个的公开内容中。
106.图10a是柄部组件140的侧视图,其中柄部主体141的一部分被移除,使得可以看到柄部组件的一些内部部件。柄部组件140包括第一致动器143和第二致动器142,并且在该实施方案中,第一致动器143在第二致动器142的远侧。第一致动器143可同时相对于柄部主体和相对于第二致动器(在该实施方案中为致动器142)轴向移动和旋转。第一致动器143与外部细长主体诸如外轴131(参见图9b)能够操作地连通。致动器143的轴向移动(朝远侧或朝近侧)引起外轴131的轴向移动,然而致动器143的旋转引起外轴的旋转。第二致动器142与内轴诸如内轴132(参见图9a)能够操作地连通。第二致动器142的致动(在该实施方案中为旋转)引起内轴的偏转。在该实施方案中,可旋转且可轴向移动的致动器(即,第一致动器143)与外轴能够操作地连通。
107.第一致动器143联接到图10b中的分解图所示的细长外轴移动组件150,使得第一致动器143的移动引起组件150的移动。细长外轴移动组件150类似地联接到细长外轴,使得第一致动器的移动也引起细长外轴的移动。在该实施方案中,外部细长轴在其被插入到通道156中之后附接到可移除部件153。可移除部件153和通道156被构造成使得可移除部件153在插入到通道156中时受到该通道的至少一个内表面的约束。细长外轴移动组件150也包括固定到第一致动器的远侧头部部分151。细长外轴移动组件150也包括与本文所述的旋转限制机构类似的旋转限制机构,该旋转限制机构限制第一致动器143的旋转,并且由此限制外部细长轴的旋转。上文涉及旋转限制子组件、功能和用途的任何公开内容出于所有目的并入该实施方案中,并且可并入该设计和类似设计中。在旋转期间,部件157(参见图10b)与部件161相互作用,并且部件162与部件158相互作用。这两组部件的物理相互作用将旋转限制到期望的旋转极限,例如,将旋转限制到外部主体的旋转的至多630度(在其他实施方案中,允许的旋转可大于630度,诸如至多720度并包括720度)。
108.如果期望例如在使用之后清洁外轴,则可移除部件153可与外轴分离以允许该外轴从柄部组件移除并且在重新插入和重新附接到可移除部件153或新的可移除部件(如果部件153被损坏或断裂)之前进行清洁。
109.柄部组件140还包括内轴偏转组件146,该内轴偏转组件与第二致动器142能够操作地连通。内轴偏转组件146包括中心齿轮147,该中心齿轮适于并被构造成在第二致动器142旋转时旋转。中心齿轮147经由齿轮接口与第一主轴148和第二主轴149接合,使得中心
齿轮147的旋转引起主轴沿相反方向的旋转。内轴偏转组件146(包括主轴)比细长外部主体移动组件150进一步朝近侧延伸。内轴延伸穿过外轴,并且在柄部组件150内比外轴进一步朝近侧延伸。这允许作为内轴的一部分的一根或多根拉线径向向外延伸并且与卷筒160交接。
110.细长外轴移动组件150和细长内轴移动组件146之间不存在相互作用允许内部细长轴和外部细长轴由第一致动器143和第二致动器142独立地控制。
111.柄部组件140还包括设置在柄部主体141内的印刷电路板(“pcb”)170,该pcb与缆线束电连通,该缆线束诸如图53中的柔性缆线束105,或本文中与医疗工具(诸如超声换能器)连通的缆线束中的任一个缆线束。
112.柄部组件140还包括旋转指示器180,该旋转指示器可用于向用户显示第一致动器和第二致动器中的至少一者相对于原始或中性位置旋转的程度。第一致动器143可包括旋转指示器181,当第一致动器143处于中性位置时,该旋转指示器沿着轴线与旋转指示器180对准,如图11所示。当第一致动器143旋转时,旋转指示器181相对于旋转指示器180沿其延伸的轴线旋转,这使得用户能够在视觉上理解第一致动器143以及因此外轴相对于中性位置在一定程度上旋转。类似地,第二致动器142也可具有旋转指示器182,当第二致动器142处于中性位置时,该旋转指示器沿着轴线与旋转指示器180对准,如图11所示。当第二致动器143旋转时,旋转指示器182相对于旋转指示器180沿其延伸的轴线旋转,这使得用户能够在视觉上理解第二致动器143以及因此内轴相对于其中性位置在一定程度上偏转。
113.在一些另选实施方案中,柄部组件可包括一个或多个传感器以跟踪外轴发生了多少旋转,或内轴发生了多少偏转。在一些实施方案中,柄部组件可包括用于每个致动器的编码器。
114.在包括外轴和内轴的本文的实施方案中的任一个实施方案中,装置可在内轴和外轴之间包括一种或多种润滑剂,以使得通过减小内轴和外轴两者之间的摩擦更容易使该内轴和外轴相对于彼此移动。如果医疗装置需要清洁以重复使用,则可在清洁过程之后在内轴和外轴之间添加附加润滑剂。
115.在本文的一些实施方案中,医疗装置可包括柔性构件,诸如柔性导体束(其在本文中可称为导体束、挠性束或它们的其他类似衍生物),其联接到医疗装置的远侧区域(例如,探头末端)并且从该远侧区域朝向该医疗装置的近侧区域延伸(参见例如示例性图4至图6g所示的导体束2020;或来自图9b的束105)。探头末端可包括与柔性导体束电连通的超声换能器。在本文的一些实施方案中(例如,图9a至图11),探头末端和导体束可通过柄部致动器(例如,如图10a所示的致动器143)的致动而轴向(朝近侧和/或朝远侧)移位。在一些情况下,导体束设置在细长构件(例如,可转向内部细长主体132;或细长构件131)内,并且当探头末端朝远侧推进或朝近侧回缩时相对于该细长构件轴向移动。当远侧区域(例如,超声探头)和导体束朝近侧回缩(在朝远侧推进之后)时,由于束和例如其中设置有导体束的细长构件(例如,可转向内轴132)之间的摩擦,导体束可趋于在其远侧端部附近或邻近该远侧端部折叠、聚拢或以其他方式弯曲。如果医疗装置处于直的构型以及如果医疗装置具有一定程度的弯曲(例如,在从直的构型或线性构型偏转之后),则可发生聚拢。
116.为了降低聚拢或弯曲趋势的程度或甚至完全防止聚拢或弯曲的趋势,本文的医疗装置中的任一个可包括结构张紧构件,该结构张紧构件适于并被构造成在导体束联接到远
侧医疗工具的位置附近的位置处对柔性构件(诸如柔性导体束)施加或保持张力。通过张紧柔性构件,可最小化或甚至防止柔性构件的折叠或聚拢。当在该上下文中使用时,“张紧”构件适于并被构造成通过在远侧探头朝近侧回缩时朝近侧移动柔性导体束的至少远侧部分来减少柔性导体的一个或多个远侧区域聚拢(与没有张紧构件的装置相比)。在一些实施方案中,结构张紧构件(例如,张紧棒)可以物理地固定到柔性导体束(例如,直接或间接附接)。一般来讲,本文的张紧构件与柔性构件(例如,挠性导体束)能够操作地连通,使得张紧构件的移动或致动向柔性构件施加一定的力,并且可引起柔性构件的移动(例如,在近侧)。在一些示例性实施方案中,结构张紧构件可设置在医疗装置的柄部组件中或由医疗装置的柄部组件承载。在这种情况下,结构张紧构件可以是单个部件或单独部件的组件。
117.图12a至图12f示出了可结合到本文任何合适的医疗装置中的示例性医疗装置的柄部组件部分。例如,图12a至图12f中的柄部组件可以为在其远侧端部处或其远侧端部附近包括医疗工具(例如,超声成像探头)的医疗装置的一部分,其示例在本文中有所描述。本文的任何其他实施方案或特征部以引用方式并入图12a至图12f所示的示例性柄部组件中。
118.示例性柄部组件310包括第一致动器314和第二致动器322,其中第一致动器314在近侧致动器322的远侧。第一致动器314适于并被构造成相对于第二致动器322轴向(朝远侧和朝近侧)移动(并且任选地也可相对于该第二致动器旋转),并且可与细长主体(例如,131或132)能够操作地连通,该细长主体可包括位于远侧区域中的医疗工具(例如,103)。柄部组件310(包括致动器)可结合来自本文任何其他柄部组件的任何相关公开内容。柄部组件310是其一部分的医疗装置还包括柔性构件(例如,图9b中的柔性导体束105),该柔性构件在第一远侧位置处牢固地联接到(直接或间接地)医疗工具(例如,如图9b和图9c所示,其中医疗工具103固定到柔性构件105)并且从该医疗工具朝向柄部组件310朝近侧延伸。柔性构件可为柔性导体束并且可延伸到柄部组件310中,如图所示。柔性构件的一部分设置在细长主体的外表面内(例如,在131和/或132内)。医疗装置还包括张紧构件,该张紧构件在第二位置316处固定到柔性构件,该第二位置邻近第一位置(在该上下文中,“第一位置”可被称为第一远侧位置或其衍生物)。图12a示出了示例性张紧构件312,而图12a中的参考标号312也指向张紧构件的任选细长刚性构件(在该实施方案中,细长刚性构件是线性的并且轴向延伸)。张紧构件312适于并且被构造成当医疗工具朝近侧回缩时张紧柔性构件。这在本文中可被称为向柔性构件施加张力,或张紧柔性构件,或保持柔性构件中的张力。在该示例性实施方案中,张紧构件312适于并被构造成在医疗工具朝近侧回缩时张紧柔性构件,这在该实施方案中在第一致动器314从其在图12a至图12c所示的位置朝近侧回缩时发生。当医疗装置处于直的构型时并且当医疗装置处于非直的(线性)构型时,诸如当装置可偏转或弯曲时,本文的张紧构件可施加张力。
119.在该实施方案中,张紧构件312(其可包括图12a中所示的张紧棒)在位置316处固定(例如,直接附接)到柔性导体束,在该实施方案中,该位置在柄部组件内部。张紧构件可另选地在不处于柄部内的位置处(诸如在柄部的外部,诸如在外轴和内轴中的一者或两者的内部)固定到柔性构件。在该实施方案中,张紧构件也相对于第一致动器314轴向固定,使得第一致动器314的轴向移动引起张紧构件312的轴向移动(其可以1:1移动比率)。因为张紧构件312也固定到柔性构件(例如,在位置316处),所以张紧构件312的轴向移动也导致柔性构件在位置316处的轴向移动。通过将张紧构件312固定到柔性构件,当第一致动器314朝
近侧回缩时,柔性构件在张紧构件固定到柔性构件的位置的远侧张紧,这防止了柔性构件在其靠近或邻近医疗工具的远侧区域处折叠或聚拢(或者与没有张紧构件的装置相比,至少减小了折叠/聚拢的程度)。
120.柔性构件可包括柔性导体束,诸如本文的柔性导体束中的任一者。在图12a至图12f中,张紧构件包括具有固定长度的刚性细长构件(在图12a中通常称为312)。如图所示的刚性张紧构件具有大致纵向轴线,在该实施方案中,该大致纵向轴线与医疗装置的纵向轴线和/或柄部组件的纵向轴线平行。刚性张紧构件可以由多种材料制成,诸如刚性塑性构件。
121.本文的张紧构件可确保医疗工具行进的距离与柔性构件上第一位置和第二位置之间的任何点行进的距离相同。本文的张紧构件可确保医疗工具行进的距离与张紧构件固定到柔性构件的位置(例如,图12a中的位置316)行进的距离相同。
122.当医疗工具朝近侧回缩时(当医疗装置是直的构型时),张紧构件和柔性构件之间的固定关系使柔性构件在第一位置和第二位置之间保持基本上平坦或直的构型。在该上下文中,展平构型可包括其中柔性构件也可被扭转(即,柔性构件可以为平坦的并且仍然被扭转,但不聚拢/折叠)的实施方案。如本文所用,展平构型指示柔性构件没有折叠或聚拢。
123.其中结合有张紧构件的医疗装置也可以是可转向的或可偏转的。本文的张紧构件可以适于并被构造成即使医疗装置(包括柔性构件)处于非直的(例如,偏转、转向、弯曲)构型,也可以向柔性构件施加张力。当本公开是指在柔性构件中保持基本上展平构型时,其是指医疗装置可处于直的构型的情况,这不必定是该情况,诸如当医疗装置已被转向、弯曲或偏转时。
124.当医疗工具朝近侧回缩时,张紧构件和本文的柔性构件之间的固定关系防止柔性构件在第一位置和第二位置之间形成折叠(即,弯曲或聚拢)。在该上下文中,折叠、弯曲和聚拢包括柔性构件的第一区域,该第一区域与柔性构件的第二区域轴向重叠,并且还包括柔性构件的大致弯曲和聚拢,诸如柔性构件的不平坦并且例如形成弯曲、弯曲区域和/或来回曲折的区域。
125.柔性构件可以具有平坦的顶部表面和底部表面(例如,具有一个或多个平坦表面的导体束),并且任选地,张紧构件可固定到顶部表面和底部表面中的至少一个。例如,图6a至图6g示出了具有平坦或大致平坦的第一表面和第二表面(例如,顶部表面和底部表面)的柔性构件,并且张紧构件可固定到平坦或大致平坦的表面中的一者或两者(例如,诸如在位置316处)。它们可使用多种技术固定,诸如使用粘合剂、焊接或其他粘结技术。
126.张紧构件可与柄部致动器能够操作地连通(直接地或间接地),使得致动器的轴向移动使张紧构件轴向移动。柄部致动器还可适于并被构造成旋转(例如,致动器314)以引起医疗工具的旋转,并且任选地,其中致动器的旋转不引起张紧构件的旋转。因此,张紧构件可适于在致动器轴向移动时轴向移动,但在致动器旋转时不旋转。这可通过张紧构件与致动器操作地连通(直接地或间接地)的方式来实现。
127.医疗装置可包括内部细长主体(例如,132),该内部细长主体包括其中设置柔性构件的至少一部分的管腔。内部细长主体可以是可独立转向的,诸如利用单独的可独立地致动的柄部致动器(例如,致动器322)。其中医疗装置包括内部构件和外部构件、该内部构件可独立地控制(例如,轴向地和旋转地)的本文其他实施方案的各方面完全结合在本文实施
方案中的任一个中。
128.柔性构件可联接到柄部组件中的印刷电路板(例如,如图12a所示的321“板”)。张紧构件可联接到印刷电路板近侧的柔性构件。在另选的实施方案中,张紧构件可联接到印刷电路板远侧的柔性构件。
129.图12a至图12f是医疗装置的一部分的示例,其包括细长外部主体(例如,131),该细长外部主体包括在细长主体的远侧区域中的探头末端;柔性导体束(例如,105),该柔性导体束在第一位置处牢固地联接到探头末端(在图9b和图9c中示出)并且从医疗工具朝近侧延伸并进入柄部组件中,柔性构件设置在细长主体的外表面内;内部细长主体(例如,131),该内部细长主体的至少一部分设置在细长外部主体内,该内部细长主体任选地可转向,其中柔性导体束的至少一部分设置在内部细长主体内并且被构造成可相对于该内部细长主体轴向移动;张紧构件,该张紧构件在柄部组件中的第二位置处固定到该柔性构件,张紧构件适于并被构造成当探头末端朝近侧回缩时在该柔性构件上施加张力。如本文所用,探头末端可包括一个或多个超声换能器。
130.图12e至图12f示出了柄部外部壳体320的一半,其中两个形成柄部组件310的外表面的一部分。柄部壳体320包括径向向内延伸的特征部315,该特征部适于与控制张紧构件312的移动的控制器交接。特征部315可包括引导件,该引导件被构造成在一个或多个位置处与张紧构件交接并且帮助稳定张紧构件。
131.可适当地集成到柄部组件310中的本文任何其他实施方案中的任何其他柄部组件部件以引用方式并入本文。
132.在本文的任何实施方案和权利要求中,短语“张紧构件”可替换为“拉直构件”、“展平构件”或其衍生物。如本文所述,拉直构件或展平构件是指当医疗装置处于拉直构型时在柔性构件中保持基本上直的或展平构型,并且不需要装置总是具有拉直构型。因此,即使柔性构件不一定被置于张力下,其也仍可由于拉直构件而沿其长度的至少一部分保持处于拉直(即,不折叠构型)。例如,图12a中的构件312是拉直构件的示例,即使其也用作张紧构件。这适用于本文所述、所示和所要求保护的所有张紧构件。在本文的一些实施方案中,“构件”可为拉直构件(或展平构件)并且还可用作张紧构件。另外,本文的短语“张紧构件”可替换为“防折叠构件”、“防弯曲构件”、“防聚拢构件”或其衍生物。
133.上述公开内容描述了在一些实施方案中,柔性构件诸如导体束2010可沿其长度的一部分扭转。例如,导体束可扭转以沿医疗装置的长度的一部分提供更平衡的横截面。导体束可仅在将经历偏转的医疗装置的一部分中扭转。
134.图13a至图13e示出了包括扭转的柔性构件(诸如柔性导体束)的示例性医疗装置的一部分。图13a至图13e中的实施方案可与本文所述的任何其他合适的特征部和/或医疗装置结合。
135.图13a至图13e中所示的医疗装置的部分330包括位于远侧区域处的医疗工具332、联接到该医疗工具并且从该医疗工具朝近侧延伸的柔性构件331、以及包括多个电连接器的近侧端部区域333。柔性构件331可为柔性导体束,诸如本文的束中任一者。医疗工具332可包括超声成像换能器339。柔性导体束331具有导体束在其中扭转的区域338,扭转区域338具有远侧端部和近侧端部。柔性导体束331还包括在扭转区域334远侧的未扭转的区域336和在扭转区域336近侧的未扭转的区域340。医疗工具332可联接到外轴,诸如图9b所示
的外轴131。
136.扭转区域338从其远侧端部到其近侧端部的长度可变化,并且在一些实施方案中为5cm至15cm,诸如8cm至15cm,诸如11cm。在其上方形成完整圈的长度可变化很大,诸如1cm至5cm,诸如3cm。
137.在扭转区域的长度上的扭转次数也可变化,诸如但不限于7至9次完全扭转。
138.形成柔性构件(例如,柔性导体束)的扭转区域的示例性方式是在远侧端部(例如,探头末端)处将柔性构件联接到医疗工具。然后可在柔性导体束上方推进薄的pet热收缩节段。可将装置的一部分保持在适当位置,同时将另一部分扭转至期望的圈数以形成扭转区域。在维持扭转构型的同时,pet可在扭转束区域上方热收缩。随后可添加附加的pet层。然后可将细长构件(例如,轴131)放置在束(包括扭转区域)上方,并且可将细长构件粘结到医疗工具。
139.以下概念可以应用于上文所阐述的任何合适的装置、系统和/或使用方法。虽然以下公开内容通常在成像导管,并且具体地超声成像导管的上下文中描述,但是随后的概念可以应用于任何类型的合适医疗装置,该合适医疗装置包括传输电信号所通过的缆线。一个仅示例性说明性医疗装置是超声成像导管,该超声成像导管包括与一个或多个超声换能器电连通的缆线束,其中该缆线束将信号传输到超声换能器和/或从超声换能器传输信号。关于本文的图1至图13e示出和描述了示例性超声成像装置,包括该示例性超声成像装置的柄部,该示例性超声成像装置的公开内容以引用方式完全并入以下公开内容中。例如,图14至图20中所示的柄部组件及其描述可以结合与本文图1至图13e中的任何图中的柄部组件相关的本文公开内容中的任何公开内容。
140.图14a和图14b示出了医疗装置的示例性柄部1400,其中移除了柄部壳体的一半以显示内部柄部部件。本文柄部组件中的任何柄部组件中的任何部件可以具有关于图1至图13e中的实施方案更详细地描述的示例性设计。例如,图14a和图14b中的挠性束1402可包括本文电柔性束中的任何电柔性束的公开内容中的任何公开内容。另外,例如,图1中的推动臂1404可包括关于本文适于维持缆线束中的张紧的任何张紧构件的公开内容中的任何公开内容。另外,图14a和图14b中的内轴1406可以是本文中的内部构件(或其任何衍生物)中的任何内部构件。另外,图14a至图20中从柄部1400朝远侧延伸的医疗装置还可以包括外部构件或外轴,诸如本文所述的那些中的任一者。还应理解,“内”轴是说明性的,并且医疗装置轴不一定需要内轴和外轴。在包括内轴和外轴的实施方案中,该两个轴可以相对于彼此能够轴向移动,以允许伸缩探头末端,而在本文的任何实施方案中,内轴和外轴可以相对于彼此不能移动,诸如在图20中所示的示例中。
141.一些医疗装置缆线可能易受在感兴趣的频率下沿着缆线线路的噪声的影响。本公开的一个方面涉及抗扰性能以降低噪声。图14a示出了示例性柄部,该示例性柄部中包括示例性电噪声抑制构件1408,该示例性电噪声抑制构件包括管腔,柔性缆线束1402穿过该管腔。仅举例来说,本文电噪声抑制构件中的任何电噪声抑制构件可包括铁氧体珠粒,该铁氧体珠粒的一般示例是已知的。本公开可以在某些实施方案的上下文中指代铁氧体珠粒,但是应当理解其仅为说明性的,并且可使用电噪声抑制构件的其它材料和/或构型。本文中的噪声抑制构件可包括使得该噪声抑制构件适于增加对联接到敏感模拟线路中的任何rf噪声的阻抗的材料或构型中的一者或两者。应注意,在缆线束1402穿过电噪声抑制构件1408
之前,缆线束屏蔽件1410(其示例在图18中示出)已经从柄部内的缆线束1402移除,以便不会使屏蔽件1410阻抗减小。
142.虽然在本文的示例中描述了铁氧体珠粒,但是这些被理解为示例并且可以使用其它材料和/或构型。通常,本文的噪声抑制构件包括被构造成围绕一个或多个信号线导体,使得周围材料提供高阻抗路径的材料,该高阻抗路径旨在耗散在来自信号线的周围材料中诱导的目标范围内的频率。频率的耗散提供了滤波或噪声抑制效果。周围材料可包括烧结粉末并且可以形成为中空圆柱形或类似的挤出多边形形状。材料可以形成为与穿过中间延伸的信号线导体呈一体,并且在一些实施例中,包括在信号线导体上方夹紧在一起的两个半部。周围材料的阻抗和滤波效果可以基于烧结粉末的选择、尺寸和相对量来优化。粉末通常形成为包含氧化铁和其它材料的混合物的陶瓷化合物,这些其它材料诸如为钴、铜、锰、镁、镍和锌。周围材料的周长、厚度和长度也可以针对期望的效果进行优化。信号线(例如,本文的缆线束)可以穿过中间一次,或者在穿过一次之后,可以围绕周围材料的外部布线并且沿与第一次穿过相同的方向返回穿过中心多次(形成绕组)。各种构造和构型允许在给定频率范围内优化阻抗。在心内超声成像的一些应用中,可以选择铁氧体构造以提供增强的对《10mhz的频率的抗扰性并抑制》100mhz的频率的辐射。可以在沿着信号线导体(本文的缆线束)的路径的不同位置处采用不同的周围材料实施方案,以实现不同的噪声抑制效果。
143.本公开的一个方面涉及改善医疗装置的柄部内的发射。图14a和图18示出了示例,在这些示例中,多余的挠性缆线束1402设置在柄部中并且在柄部中以有组织的方式在折叠区域1412中折叠,并且在该实施方案中如图所示抵靠柄部1400的壳体的内表面以手风琴样式构型折叠。如图所示,缆线束屏蔽件1410在束在区域1412中呈现其折叠构型之前被布线出缆线束1402,如图所示。在区域1412中折叠之前将屏蔽层1410与束1402的其余部分分离,使屏蔽层1410的电感最小化,同时增加了感兴趣频率下的信号缆线的阻抗。如图所示将多余的缆线长度以手风琴样式折叠方式进行折叠可减小单元至单元变化,最小化信号缆线的自感并且可以帮助减少辐射的发射。然而,在本文的一些实施方案中,缆线束可能不会在柄部内折叠,其示例在图20的示例性实施方案中示出。
144.图14a中设置在柄部1400内的铁氧体珠粒1408围绕挠性缆线束1402的含有信号线和接地的部分或在该部分周围定位,但不围绕屏蔽件1410或在该屏蔽件周围定位,如图所示。这种构造的示例性优点可以是增加对进入缆线束的rf的阻抗(用于降噪),而不增加对屏蔽件1410的阻抗。屏蔽阻抗应尽可能低,以分流出任何rf电流拾取。通过在柄部中的缆线束1402穿过铁氧体珠粒1408之前从该缆线束移除屏蔽件1410,铁氧体珠粒1408不会增加缆线束屏蔽件1410的阻抗。缆线束1402'的节段被示出为成扇形散开到柄部内的印刷电路板(“pcb”)上的附接位置。容座挠性部1414还示出为在柄部近侧端部处联接到容座。图14b示出了柄部和标签噪声抑制构件1410,而为清楚起见没有示出缆线束。
145.如果系统如此构造,则铁氧体(或其它合适的噪声抑制构件/材料)可以改善对外部噪声,诸如在5mhz至10mhz成像频率内的外部噪声的抗扰性。铁氧体珠粒可被选择成使在期望频率范围(例如,5mhz至10mhz)内的阻抗最大化,同时允许该铁氧体珠粒适配在柄部壳体中。所获得的示例性阻抗在感兴趣范围内为约90欧姆至102欧姆。可以通过增加“线匝数”或“t”来增加阻抗,该“线匝数”或“t”被定义为缆线穿过铁氧体内部的次数。阻抗随着线匝数的平方而增加。缆线可以穿过铁氧体达1t,但是缆线匝数可以转变为2、3或4,直到铁氧体
id的极限。实心铁氧体的替代物是具有被夹紧在缆线周围的“分体式”铁氧体。这可以允许进行acf粘结,并且然后包裹缆线。实心铁氧体内的1t可足以充分改善噪声抗扰性。另外,对于实心芯,如果缆线包裹在铁氧体周围,则可能没有足够的松弛来进行acf粘结过程。在示例性具体实施中,期望频率内的太多阻抗可能对例如图像品质有负面影响。
146.如图14a所示,多余的缆线束可以在柄部内以受控和组织的方式或构型折叠。例如,如图14a所示的“手风琴”样式折叠方式可以使环路和被感应回到挠性束中的任何rf最小化。肋或其它突出构件可以直接添加到柄部壳体的内表面中(例如,与柄部壳体的内表面一体地形成),以促进挠性缆线束的折叠。另选的实施方案是单独的非一体式柄部部件,以促进挠性缆线折叠。
147.如上所述,将屏蔽件从缆线束拉出或移除,如示例性图14a和图17所示。顶部屏蔽条和底部屏蔽条两者短接到单根线,该单根线焊接到容座的经镀覆表面,如图14a和图15(在位置1511处)所示。此镀覆使屏蔽件连接到脐带缆线插头。这种方法的示例性益处可包括以下中的一者或多者:以尽可能低阻抗的路径将rf从装置传输出;防止该屏蔽件进入该铁氧体;或最小化在其它导体附近的屏蔽件的环路,该环路将提供更多噪声电感进入导体中。
148.图14a和图15示出了具有任选的张紧控制推动臂的成像导管的示例性实施方案,该张紧控制推动臂可包括本文所述的张紧构件(例如,关于图1至图13中的任一者)的公开内容中的任何公开内容。推动臂可以存在于导管设计中,在该导管设计中内轴和外轴能够相对于彼此移动。在这些实施方案中,缆线束可以在内轴的出口与推动臂附接件之间保持完整(屏蔽件和挠性部的其余部分),以允许束用远侧末端来回伸缩(2.5cm至3.0cm),该远侧末端中可具有超声换能器。在推进期间从末端提供对束的张力,而在回缩期间从推动臂附接点提供张力。可提供在推动臂附接件近侧的附加完整部分(另外2cm至3cm)以允许在推进和回缩期间改变束半径。虽然可以在推动臂附接件处将屏蔽件拉出束,但是可以优选地在附加2cm至3cm之后拉出屏蔽件以防止该屏蔽件移动。屏蔽件出口可以固定,并且剩余的缆线立即被布线到噪声抑制构件中。
149.医疗装置的远侧末端,诸如本文包括超声探头的远侧末端中的任何远侧末端,可包括屏蔽件。例如,一些医疗装置末端可包括超声换能器。除了有声学窗口的位置之外,屏蔽条可以围绕末端(沿着现有的短挠性条)延伸。屏蔽件也可以围绕换能器的侧面包裹。末端挠性条也可以镀覆或涂覆在连接到屏蔽导体的导电材料中。可以在换能器上方提供非常薄的屏蔽涂层,达超声波长的至少1/4至1/8。
150.一些实施方案可包括结合到pcb和在pcb与导管连接器之间延伸的挠性电路的各层中的附加屏蔽层。屏蔽件还可以使用铜带或其它类似构造外部施加到pcb和挠性电路。附加屏蔽层可以直接连接到导管连接器屏蔽件,或经由低阻抗屏蔽连接线连接到导管连接器屏蔽件(图18)。在另一实施方案中,低阻抗屏蔽连接线可以终止于附加屏蔽层的远侧,并且附加屏蔽层的近侧端部终止于连接器屏蔽层。例如,可以通过使用焊料、焊接、机械接触或其它常规技术来进行终止。
151.一些实施方案可以包括脐带连接器屏蔽件。可以通过导管容座和脐带插头的经镀覆表面在导管与缆线屏蔽件之间进行连接。较低阻抗的连接可以优选地添加到现有的镀覆连接中或被提供以代替现有的镀覆连接。例如,容座和插头的中心芯可适于提供与彼此的
直接电连接。可以进行“香蕉样式”连接,或可以进行其他弹簧引脚、c-引脚或杠杆臂金属-金属机械连接。代替屏蔽镀覆或除了屏蔽镀覆之外,定向编织线(优选平坦的屏蔽线)可以在连接器引脚与脐带缆线和导管中的屏蔽件之间电附接(焊料、压合连接等)。脐带缆线插头可以具有用于来自导管容座连接器的公样式引脚的凹入式防接触容座。这可以定位在中心轴线上,但也可以位于内圆周上或集成到缆线中。
152.一些实施方案可包括脐带铁氧体。铁氧体上的夹具可在脐带缆线的外部上方使用,以改善噪声抗扰性。可在缆线上使用3t或4t。此使用是本领域中常见的。然而,可以在屏蔽件下使用适当尺寸的铁氧体,并且将该铁氧体集成在设计中。这可以位于dlp(控制台连接器)侧、dlp外部,或者实际上位于dlp的外壳内部(和屏蔽笼内部)。它也可以在插头(导管连接器)侧附近结合,但是此位置中的额外重量可能不是期望的并且应被考虑。
153.图15和图16示出了图14a中所示的示例性柄部的一部分的照片,而图16另外突出显示了柄部内的示例性缆线束1602路径,其中部件关于图14a、图15、图17、图18和图19类似地标记。
154.图17示意性地示出了在图14a至图16中示出的柄部内的示例性缆线束1702布线(柄部外壳未示出)。图17排除了柄部外壳以提供更清晰的布线路径。屏蔽件1710在其穿过噪声抑制构件1708(例如,铁氧体珠粒)之前从缆线束1702移除,并且缆线束被示出为在折叠区域1712中折叠。缆线束的节段成扇形散开到印刷电路板711上的附接位置,如图所示。还示出了容座1713。
155.图18示出了成像导管的示例性实施方案,其中柄部1800中不包括噪声抑制构件(例如,铁氧体珠粒)。柄部1800可以包括在本文的任何其它柄部中描述的任何其它柄部部件或功能性。例如,示出了示例性内轴1806。在该示例中,屏蔽层1810直接从缆线束布线到容座1813,如图所示。缆线束在折叠区域1812中以手风琴样式折叠。在将屏蔽层从束移除之后,如图所示,缆线束1802被直接布线到pcb,并且在位置1803处成扇形散开到pcb附接点。
156.示出了附加的示例性细节和零件,该细节和零件可以与图14a至图17中所示实施方案的柄部部件相同或相似。来自图14a至图17的实施方案的任何合适的公开内容可以以引用方式并入图18中所示的实施方案的公开内容中。图18还示出了示例性缆线束横截面,其中本文的实施方案中的任何实施方案可包括诸如缆线束。然而,在该实施方案或任何其它实施方案中,缆线束是示例性的,而不是每个层都需要被包括。
157.图19示出了成像导管的示例性实施方案,在该成像导管中,柄部1900不包括铁氧体珠粒,并且其中多余的缆线束1902在环形区域1905中呈环状。图19中所示的柄部可以结合本文中任何其它柄部和成像导管的任何合适的特征部。柄部1900具有在该柄部中延伸的内轴1906,缆线束1902从该内轴延伸,如图所示。缆线束在位置1903处成扇形散开以附接到pcb,如图所示。柄部1900可包括关于本文的其它柄部描述或示出的任何其它合适的部件或功能性。
158.图20示出了示例性柄部2000,其中移除了柄部外壳2005的一半以示出该柄部外壳中的内部部件。柄部包括导管轴控制系统2010,该导管轴控制系统可包括本文中的任何合适的特征部以引起本文中的可偏转轴的偏转,该合适的特征部诸如为通过细长可偏转轴布线的一根或多根拉线。在该示例中,柔性缆线束2002围绕多个印刷电路板2004延伸。这与本文的图14a至图19相反,在这些图中柔性缆线束在多个印刷电路板中的第一印刷电路板与
第二印刷电路板之间通过。在该示例中,在缆线束的其余部分穿过铁氧体珠粒2006之前,屏蔽件2002从柄部内的缆线束移除,如图所示。随后,屏蔽件被移除的束2007朝近侧延伸并且联接到印刷电路板2004,如图所示。在图20的示例中,内导管轴和外导管轴不能相对于彼此轴向移动(非伸缩),并且缆线束在组装柄部之后不能在柄部内轴向移动。如图所示,柔性束可以围绕印刷电路板2004通过,因为柔性缆线束不需要遵循直线轴向路径以便于轴向移动,如在一些包括伸缩探头末端的示例中可能是有益的。围绕印刷电路板2004布线柔性缆线束可以帮助增加缆线束2002中的信号线与印刷电路板2004中的信号线(特别是模拟信号线)之间的距离,以便最小化噪声拾取。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1