基于可穿戴智能设备的帕金森闭环深部脑刺激系统
1.本发明涉及闭环深部脑刺激系统,具体涉及基于可穿戴智能设备的帕金森闭环深部脑刺激系统。
背景技术:
2.帕金森是一种常见的神经退行性疾病,给中老年人的身体健康和生活质量带来了极大危害,其常见症状为静止性震颤、冻结步态和动作迟缓。深部脑刺激作为一种新型疗法,具有可逆性、可控性、低风险的特点,大大降低了传统的药物治疗和核团损毁术的副作用和致残风险。然而由于帕金森的发病机理尚不明确,目前深部脑刺激参数依靠医师经验对患者临床症状及体征进行主观判断并采用试凑法进行设定,缺乏客观定量的评估指标,难以实现实时闭环优化调节以适应患者随环境扰动和疾病进程而变化的疾病状态。
3.因此,针对上述问题,亟需研发一种可以实时全面监测评估帕金森症状并据此闭环调节刺激参数的系统,能够实时监控患者状态,对患者施加及时有效的刺激。
技术实现要素:
4.为解决目前临床问题,本发明提供了一种基于可穿戴智能设备的帕金森闭环深部脑刺激系统,旨在实现实时采集手部震颤信号以及足底压力信号,并对两类震颤信号以及压力信号进行实时同步处理,用以检测评估帕金森患者的震颤和冻结步态等症状,基于评估结果可以手动调控或通过嵌入式闭环开关控制算法实时调节深部电刺激参数,以解决目前临床不能实时灵活优化深部电刺激的问题。
5.为实现上述目的,本发明通过以下技术方案实现:
6.一种基于可穿戴智能设备的帕金森闭环深部脑刺激系统,其特征在于:包括用于帕金森症状检测处理的可穿戴智能设备和深部脑刺激子系统;
7.其中,所述的用于帕金森症状检测处理的可穿戴智能设备包括智能腕表、智能指环和智能鞋垫;智能鞋垫用于获取足底压力信号,智能指环用于获取手指震颤信号,智能腕表用于获取手腕震颤信号同时接受智能指环和智能鞋垫采集的足底压力信号并进行分析处理;
8.具体分析处理的过程是:智能腕表同时同步采集所述的手腕震颤信号、手指震颤信号以及足底压力信号,对足底压力信号进行足底压力成像处理得到统一规格的压力信号热力图;
9.然后对手腕震颤信号、手指震颤信号、压力信号热力图进行特征层面数据融合,特征层面数据融合采用的是卷积神经网络集合+循环神经网络模型,对采样数据进行周期性处理;所述的卷积神经网络集合由若干个具有相同结构的卷积神经网络组成,多个卷积神经网络顺序编号,所述循环神经网络包括输入层、一个隐藏的全连接层和一个softmax模型的输出层;首先将获取的压力信号热力图作为卷积神经网络集合的输入,各卷积神经网络并行工作,互不干扰,但保持同时启动;压力信号热力图按照时间顺序分别依次进入卷积神
经网络集合中的相应卷积神经网络,得到足底压力值的压力时间序列数据,将手腕震颤信号、手指震颤信号、足底压力值的压力时间序列数据在时域上进行数据对齐,组成一组三维时间序列信号,输入到循环神经网络中;
10.所述循环神经网络根据输入信号,依次识别出不同时刻的足底压力分布以及两类震颤信号大小所对应的pd患者状态,输出并记录不同时刻的pd患者状态数据,再通过动作识别时序整合各个时刻的识别结果,获得完整的识别结果,实现pd患者状态的评估;
11.所述循环神经网络每个时刻的输入信号除卷积神经网络集合提取的压力时间序列数据以外,还包括两类震颤信号、上一时刻循环神经网络的输出数据以及上一时刻循环神经网络识别结果转化成的向量数据。
12.本发明的有益效果是:本系统采用智能指环、智能腕表和智能鞋垫实时采集患者病人震颤和足底压力信号,通过卷积神经网络集合,实现了压力与震颤信号时域上数据对齐,保证每个时刻都能够同时观察患者的多种症状信息,综合分析判断患者患病程度,且所述可穿戴设备易于实施,不影响患者生活。通过嵌入式开关控制算法分析采集结果,评估患者当前状态,通过手动或自动方式实时调节深部脑刺激脉冲参数。
附图说明
13.图1为本发明基于可穿戴智能设备的帕金森闭环深部脑刺激系统的佩戴结构示意图;
14.图2为本发明中智能鞋垫控制结构示意图;
15.图3为本发明中智能指环的控制结构示意图;
16.图4为本发明中智能腕表控制结构示意图;
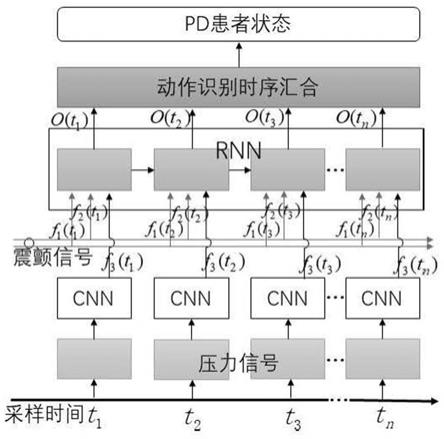
17.图5为本发明中分析处理的过程示意图;
18.图6为本发明所实现的闭环调控结构示意图。
具体实施方式
19.下面结合附图及实施例对本发明做进一步详细说明,但并不以此作为对本申请保护范围的限定。
20.本发明基于可穿戴智能设备的帕金森闭环深部脑刺激系统,包括用于帕金森症状检测处理的可穿戴智能设备和深部脑刺激系统;其中,所述的用于帕金森症状检测处理的可穿戴智能设备包括智能腕表,智能指环和智能鞋垫。智能鞋垫用于获取足底压力信号,智能指环用于获取手指震颤信号,智能腕表用于获取手部震颤信号同时接受智能指环和智能鞋垫采集的信号并进行分析处理。深部脑刺激子系统包括皮下深部脑刺激器和植入在大脑内部的电极,其中皮下深部脑刺激器和电极通过导线连接,刺激电极佩戴在使用者头部。
21.所述基于可穿戴智能设备的帕金森闭环深部脑刺激系统,具有两种工作模式:手动调节模式和自动调节模式。
22.在手动调节模式中,所述的可穿戴智能设备能够采集手指和手腕的震颤信号以及足底压力信号,并将采集到的信号通过无线通信方式传输到智能腕表,通过智能腕表中的特征层面数据融合分析采集到的信号,根据判别结果评估并显示当前帕金森症状,患者或医师可根据评估结果通过智能腕表手动调节皮下深部脑刺激器产生的电脉冲刺激参数;
23.在自动调节模式中,所述的可穿戴智能设备能够采集手指和手腕的震颤信号以及足底压力信号,并将采集到的信号通过无线通信方式传输到智能腕表,通过智能腕表中分析采集到的信号,根据判别结果进行深部脑刺激子系统的开关控制,实时自动调节皮下深部脑刺激器产生的电脉冲刺激参数。
24.优选的是,所述的可穿戴智能设备之间以及皮下深部脑刺激器之间通过无线通信的方式连接;所述的皮下深部脑刺激器通过无线通信方式接受来自智能腕表指令以修改刺激参数。
25.优选的是,所述的智能鞋垫包括柔性压力传感器阵列(选取贴片式压力传感器fsr402内置于鞋垫中)、微处理器、无线通信模块、电源模块和电源管理模块。所述的柔性压力传感器阵列内部传感器呈对称分布,用于采集足底压力信号;所述的六轴惯性传感器由一个三轴加速度计和一个三轴陀螺仪组成,分别用来采集患者脚部运动的3维线性加速度和3维角速度值;所述的微处理器用于控制所述柔性压力传感器阵列采集数据以及控制所述无线通信模块与智能腕表进行指令和数据交互,柔性压力传感阵列的输出与微处理器的输入端连接,微处理器通过无线通信模块与智能腕表实现通讯,电源管理模块与电源模块连接,电源模块同时为柔性压力传感器阵列及微处理器、无线通信模块供电。
26.优选的是,所述的智能指环包括六轴惯性传感器、微处理器、无线通信模块、电源模块和电源管理模块(六轴惯性传感器可以为asm330lhh六轴惯性传感器;微处理器可选用f103rbt6 32位微处理器、无线通信模块为低功耗蓝牙模块usr
‑
ble101、电源模块为as3701电源模块、电源管理模块可以为bq24020芯片,tp4056芯片等,各芯片附加相应的外围电路以连接起来)。所述的六轴惯性传感器由一个三轴加速度计和一个三轴陀螺仪组成,分别用来采集手指震颤运动的3维线性加速度和3维角速度值;所述的微处理器采用单片机系统,与传感器相连,用于控制所述六轴惯性传感器采集数据以及控制所述无线通信模块与智能腕表进行指令和数据交互。
27.优选的是,所述的智能腕表包括显示模块、六轴惯性传感器、微处理器、无线通信模块、电源模块、电源管理模块和塑料绝缘外壳,相关六轴惯性传感器、微处理器、无线通信模块、电源模块、电源管理模块均置于塑料绝缘外壳内,提供保护。所述的六轴惯性传感器由一个三轴加速度计和一个三轴陀螺仪组成,分别用来采集患者腕部运动的3维线性加速度和3维角速度值;智能腕表的微处理器与智能腕表的六轴惯性传感器相连,用于控制所述六轴惯性传感器采集数据、控制所述无线通信模块进行指令和数据交互以及对采集到的震颤信号和压力信号进行分析处理。
28.所述的智能腕表中的微处理器对采集到的震颤信号和压力信号进行数据降噪滤波处理,所使用的滤波算法包括无迹卡尔曼滤波和扩展卡尔曼滤波算法等。
29.智能腕表、智能指环、智能鞋垫三个可穿戴设备的微处理器模块为三个独立设备,均采用单片机系统;三个部分的电源管理模块和电源模块、无线通信模块可以采用相同规格,仅佩戴在不同位置时发挥作用。智能腕表通过无线通信模块与智能指环、智能鞋垫、深部脑刺激器连接用于获取智能指环、智能鞋垫的相应信号及给出深部脑刺激器相应的刺激数据。
30.所述的智能腕表中的微处理器对采集到足底压力信号进行足底压力成像采集,得到统一规格的压力信号热力图,考虑足印比例设置压力信号热力图的图像像素大小为128*
256;所述的智能腕表中的微处理器对采集到的手腕震颤信号、手指震颤信号以及处理之后的压力信号进行特征层面数据融合,评估当前患者帕金森状态。所述的手腕震颤信号、手指震颤信号以及处理之后的压力信号采样周期均为30s,采样时间为0.5h,也可以根据需求设定。
31.所述的特征层面数据融合采用的是卷积神经网络集合+循环神经网络模型,对采样数据进行周期性处理。所述的卷积神经网络集合由10个具有相同结构的卷积神经网络组成,其中,每个卷积神经网络包括输入层、3个卷积层、3个池化层和一个全连接层,卷积核大小均为3*3(本专利处理的热力图数据紧凑且图片尺寸偏小,选取小卷积核,能够表示其图像特征且较简单),卷积神经网络集合的输入输出分别为压力热力图和一组压力时间序列。所述循环神经网络包括输入层、一个隐藏的全连接层和一个softmax模型的输出层,输出信号为pd患者状态评分。首先将获取的压力热力图作为卷积神经网络集合的输入,各卷积神经网络并行工作,互不干扰,但保持同时启动。压力信号热力图按照时间顺序分别依次进入卷积神经网络集合中的相应卷积神经网络,得到足底压力值的压力时间序列数据,将手腕震颤信号、手指震颤信号、足底压力值的压力时间序列数据在时域上进行数据对齐,组成一组三维时间序列信号,输入到循环神经网络中;
32.按照时间顺序采集多帧压力信号热力图,每帧压力信号热力图按照时间顺序依次进入卷积神经网络集合中的各个卷积神经网络,各个卷积神经网络按照顺序依次编号,压力信号热力图,按照编号分别进行相应的卷积神经网络中,得到足底压力值的时间序列数据。
33.所述循环神经网络根据输入信号,依次识别出不同时刻的足底压力分布以及两类震颤信号大小所对应的pd患者状态,输出并记录不同时刻的pd患者状态数据,再通过动作识别时序整合各个时刻的识别结果,获得完整的识别结果,实现pd患者状态的评估;
34.所述循环神经网络每个时刻的输入信号除卷积神经网络集合提取的压力时间序列数据以外,还包括两类震颤信号(手腕震颤信号和手指震颤信号)、上一时刻循环神经网络的输出数据以及上一时刻循环神经网络识别结果转化成的向量数据。如图5所示,图5中,cnn表示卷积神经网络,rnn表示循环神经网络,f1(t)表示手腕震颤时间序列信号;f2(t)表示指尖震颤时间序列信号;f3(t)表示cnn网络输出信号,即一系列压力热力图经cnn集合处理后的压力时间序列信号;o(t)表示rnn输出信号,即各个采样时刻模型预测评分。各时刻压力热力图经cnn集合处理后与同时刻震颤信号一起输入到rnn中得到每个采样时刻的患者评分,最终经动作识别时序汇合模块整合,得到最终评分结果,实现患者状态评估。
35.其中,在进行pd患者状态评估之前要对pd患者识别模型进行网络训练,使得识别模型具有相应的泛化能力,识别能力能够达到识别要求。招募数名满足updrs评分的正常以及pd状态志愿者,采集受试者相应特征信号作为输入信号并统计每个受试者的updrs评分作为期望输出。将卷积神经网络集合+循环神经网络模型的输出结果和实际统计的updrs评分进行对比,计算损失函数,然后逐步调整网络参数,使得损失函数最小,以此来训练数据融合模型(即卷积神经网络集合+循环神经网络模型)。所述损失函数为:
[0036][0037]
其中,loss表示真实值与预测值之间的差异,值越小表示预测结果越好;y表示实
际的updrs评分;表示模型预测的输出。
[0038]
进一步的,参考附图6,所述的智能腕表中的微处理器对采集到的两类震颤信号(手腕震颤信号和手指震颤信号统称为手部震颤信号)和足底压力信号经数据处理后,进行数据融合,评估当前患者帕金森状态。在所述手动调节模式中,利用智能腕表显示模块为患者和医师调节刺激参数提供参考。在所述自动调节模式中,利用智能腕表中的微处理器中的嵌入式闭环开关控制算法基于评估结果自动调节刺激参数。
[0039]
本发明未述及之处适用于现有技术。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1