一种智能消毒杀菌机器人的制作方法
1.本发明涉及消毒杀菌机器人技术领域,尤其涉及一种智能消毒杀 菌机器人。
背景技术:
2.经检索,公告号为cn111588875a的文案中,提出了一种消毒杀 菌机器人,涉及消毒杀菌技术领域,包括头部、设置于头部下方的躯 干,其中,所述躯干上设置有消毒杀菌装置,所述头部设置有视野扫 描装置,所述视野扫描装置用于对环境进行识别,所述头部内还设置 有控制模块,该文案中所提供的消毒杀菌机器人,通过设置视野扫描 装置来对待消毒环境进行扫描,根据扫描结果来判断消毒杀菌的需 求,再根据该需求来控制消毒杀菌装置的运行,使得消毒杀菌装置的 运行模式能够随环境的改变而进行相应的变化,从而使得消毒杀菌装 置的运行能够满足不同的消毒杀菌需求,适用范围广,使用方便。
[0003][0004]
在以往的消毒机器人使用的过程中,当机器人工作量达到一定 时,内部消毒液使用殆尽,需要工作人员进行及时的补充,否则便会 出现消毒工序停止的情况,较为麻烦且降低了消毒效率,此外,由于 在机器人工作时需要对内部元件进行散热工作,后端散热口会出现灰 尘的堆积现象,长期以往不仅影响美观还会对散热端口造成堵塞现 象,降低了散热效率,为解决上述问题,提出了一种智能消毒杀菌机 器人。
技术实现要素:
[0005]
本发明的目的是为了解决现有技术中存在的需要时常进行补液 和散热网口容易灰尘堆积缺点,而提出的一种智能消毒杀菌机器人。
[0006]
为了实现上述目的,本发明采用了如下技术方案:
[0007]
一种智能消毒杀菌机器人,包括移动底盘,所述移动底盘的上侧 壁固定连接有上底座,所述上底座的上侧壁固定连接有消毒箱体,所 述消毒箱体外侧壁对称安装有两个紫外线消毒灯,所述消毒箱体的侧 壁固定连接有用于实现对外部消毒的喷洒机构;
[0008]
所述消毒箱体的上侧内壁固定连接有消毒液补给箱,所述消毒箱 体的下侧内壁固定连接有消毒液存箱,在消毒液存箱内设置有密封机 构;
[0009]
位于消毒箱体内的喷洒机构通液管与消毒液存箱的接口处固定 安装有水液泵,所述喷洒机构通液管内设置有水液转轮,所述水液转 轮的左侧壁设置有顶触机构,通过顶触机构与密封机构的相互配合实 现了对消毒液的定量添加功能;
[0010]
所述消毒箱体的后侧壁固定安装有散热孔,所述水液转轮的右侧 壁固定连接有能对散热孔内侧壁进行清洁的清洁机构。
[0011]
优选地,所述密封机构包括转动连接于消毒液补给箱与消毒液存 箱的连接处的弹性挡板,所述顶触机构包括与水液转轮侧壁进行固定 连接的转动杆,所述转动杆贯穿喷洒机构内管道左侧壁固定连接有顶 触轮。
[0012]
优选地,所述清洁机构包括与转动杆侧壁进行固定连接的第一锥 齿轮,所述转动
杆贯穿喷洒机构内管道的右侧壁与消毒箱体右侧壁之 间进行转动连接,所述消毒箱体的右侧内壁固定连接有固定撑杆,所 述固定撑杆的侧壁转动连接有第二锥齿轮,所述第二锥齿轮与第一锥 齿轮之间相啮合,所述第二锥齿轮的侧壁固定连接有转动轮,所述转 动轮的侧壁转动连接有连接杆,所述连接杆的另一端固定连接有滑动 杆,所述消毒箱体的右侧内壁滑动连接有清洁杆,所述清洁杆的内侧 壁与滑动杆的外侧壁之间进行滑动连接,所述滑动杆的侧壁固定连接 有第一限位块。
[0013]
优选地,三个所述消毒喷洒口之间为等距分布,所述补给箱阀门 设置于消毒液补给箱的上端。
[0014]
优选地,所述弹性挡板的弹性回复指向为逆时针方向,所述弹性 挡板采用防锈化材料。
[0015]
优选地,所述顶触轮采用凸轮结构设置,所述顶触轮的短端与弹 性挡板的上侧壁之间不会发生抵触,所述顶触轮的长端与弹性挡板的 上侧壁之间会发生抵触。
[0016]
优选地,所述消毒液补给箱的下侧内壁固定连接有第二限位块, 所述第二限位块的下侧壁初始状态下与弹性挡板的上侧壁之间进行 抵触。
[0017]
优选地,所述清洁杆与散热孔的接触端固定安装有防静电除尘毛 刷,所述防静电除尘毛刷与散热孔的内侧壁之间进行紧密贴合。
[0018]
相比现有技术,本发明的有益效果为:
[0019]
1、本发明通过消毒液补给箱、消毒液存箱、弹性挡板、顶触轮 和第二限位块之间的配合作用,由于顶触轮的凸轮结构设置,且顶触 轮的短端与弹性挡板之间不发生抵触,顶触轮的长端与弹性挡板之间 不发生抵触,弹性挡板的弹力回复指向为逆时针方向,在顶触轮转动 的过程中,长端对弹性挡板进行顶开的工作,从而消毒液补给箱内部 的水液开始流入消毒液存箱中,当短端转动到弹性挡板上端时,弹性 挡板上端的抵触力消失,此时由于弹性挡板的回复作用实现了弹性挡 板的向上闭合,由于第二限位块的设置,实现了对弹性挡板的限位作 用,在顶触轮的不断转动下,弹性挡板实现了持续的开合作用,从而 随着消毒液存箱内部水液的抽离实现了对消毒液存箱内部水液的定 量补充功能,在上述过程中,通过消毒液存箱内部损耗的水流冲力作 用和顶触轮的结构设置,实现了在消毒液存箱内部消毒液发生损耗时 对消毒液存箱内部进行伴随性的消毒液定量补充功能。
[0020]
2、本发明通过散热孔、转动杆、第一锥齿轮、固定撑杆、连接 杆和清洁杆的配合作用,随着转动杆的转动,固定安装于转动杆侧壁 的第一锥齿轮开始进行转动,与第一锥齿轮之间相啮合的固定撑杆同 时进行转动,从而带动了转动轮进行转动,由于连接杆与清洁杆之间 为滑动连接,在连接杆伴随转动轮进行转动时,连接杆侧壁的滑动杆 于清洁杆内部进行滑动,从而避免了连接杆转动时的卡顿现象,在连 接杆的带动下,当连接杆随着转动轮转动到上端时,能够对清洁杆进 行顶起作用,当连接杆随着转动轮转动到下端时,带动清洁杆进行下 拉运动,从而实现了在第二锥齿轮转动的同时,带动了清洁杆进行往 复的高低运动,由于清洁杆与散热孔的连接端固定安装有防静电除尘 毛刷,在清洁杆进行升降运动时,在不影响散热的情况下实现对散热 孔的清洁功能,在上述过程中,利用消毒水的水冲带动作用,以及连 接杆和清洁杆的结构设置,实现了对散热孔内部端口的往复清洁功 能。
[0021]
综上所述,本发明通过消毒液存箱内部损耗的水流冲力作用和顶 触轮的结构设
置,实现了在消毒液存箱内部消毒液发生损耗时对消毒 液存箱内部进行伴随性的消毒液定量补充功能,此外,利用消毒水的 水冲带动作用,以及连接杆和清洁杆的结构设置,实现了对散热孔内 部端口的往复清洁功能。
附图说明
[0022]
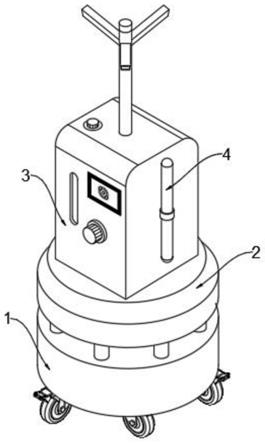
图1为本发明提出的一种智能消毒杀菌机器人的正视立体结构 示意图;
[0023]
图2为本发明提出的一种智能消毒杀菌机器人的后视立体结构 示意图;
[0024]
图3为本发明提出的一种智能消毒杀菌机器人的侧视外部结构 示意图;
[0025]
图4为本发明提出的一种智能消毒杀菌机器人的侧视内部结构 示意图;
[0026]
图5为本发明提出的一种智能消毒杀菌机器人的a结构放大示意 图;
[0027]
图6为本发明提出的一种智能消毒杀菌机器人的b结构放大示意 图;
[0028]
图7为本发明提出的一种智能消毒杀菌机器人的转动轮侧视结 构示意图;
[0029]
图8为本发明提出的一种智能消毒杀菌机器人的顶触轮立体结 构示意图。
[0030]
图中:1移动底盘、2上底座、3消毒箱体、4紫外线消毒灯、5 消毒液补给箱、6消毒液存箱、7水液泵、8水液转轮、9散热孔、10 弹性挡板、11转动杆、12顶触轮、13第一锥齿轮、14固定撑杆、15 第二锥齿轮、16转动轮、17连接杆、18滑动杆、19清洁杆、20第 一限位块、21第二限位块。
具体实施方式
[0031]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方 案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部 分实施例,而不是全部的实施例。
[0032]
参照图1
‑
8,一种智能消毒杀菌机器人,包括移动底盘1,移动 底盘的上侧壁固定连接有上底座2,上底座2的上侧壁固定连接有消 毒箱体3,消毒箱体3外侧壁对称安装有两个紫外线消毒灯4,消毒 箱体3的侧壁固定连接有用于实现对外部消毒的喷洒机构;
[0033]
消毒箱体3的上侧内壁固定连接有消毒液补给箱5,消毒箱体3 的下侧内壁固定连接有消毒液存箱6,在消毒液存箱6内设置有密封 机构;
[0034]
位于消毒箱体3内的喷洒机构通液管与消毒液存箱的接口处固 定安装有水液泵7,喷洒机构通液管内设置有水液转轮8,水液转轮 8的左侧壁设置有顶触机构,通过顶触机构与密封机构的相互配合实 现了对消毒液的定量添加功能;
[0035]
消毒箱体3的后侧壁固定安装有散热孔9,水液转轮8的右侧壁 固定连接有能对散热孔9内侧壁进行清洁的清洁机构。
[0036]
密封机构包括转动连接于消毒液补给箱5与消毒液存箱6的连接 处的弹性挡板10,顶触机构包括与水液转轮8侧壁进行固定连接的 转动杆11,转动杆11贯穿喷洒机构内管道左侧壁固定连接有顶触轮 12。
[0037]
清洁机构包括与转动杆11侧壁进行固定连接的第一锥齿轮13, 转动杆11贯穿喷洒机构内管道的右侧壁与消毒箱体3右侧壁之间进 行转动连接,消毒箱体3的右侧内壁固定连接有固定撑杆14,固定 撑杆14的侧壁转动连接有第二锥齿轮15,第二锥齿轮15与第一锥 齿轮13之间相啮合,第二锥齿轮15的侧壁固定连接有转动轮16, 转动轮16的侧壁转动连接有连接杆17,连接杆17的另一端固定连 接有滑动杆18,消毒箱体3的右侧内壁滑动连
接有滑动杆19,滑动 杆19的内侧壁与滑动杆18的外侧壁之间进行滑动连接,滑动杆18 的侧壁固定连接有第一限位块20。
[0038]
三个消毒喷洒口之间为等距分布,补给箱阀门设置于消毒液补给 箱5的上端。
[0039]
弹性挡板10的弹性回复指向为逆时针方向,弹性挡板10采用防 锈化材料。
[0040]
顶触轮12采用凸轮结构设置,顶触轮12的短端与弹性挡板10 的上侧壁之间不会发生抵触,顶触轮12的长端与弹性挡板10的上侧 壁之间会发生抵触。
[0041]
消毒液补给箱5的下侧内壁固定连接有第二限位块21,第二限 位块21的下侧壁初始状态下与弹性挡板10的上侧壁之间进行抵触。
[0042]
滑动杆19与散热孔9的接触端固定安装有防静电除尘毛刷,防 静电除尘毛刷与散热孔9的内侧壁之间进行紧密贴合。
[0043]
本发明的具体工作原理如下:
[0044]
本发明装置主要为一种智能消毒机器人,本消毒机器人携带有紫 外线灯和消毒剂设备,通过三个消毒喷洒口的设置,实现对环境进行 消毒杀菌,机器人还携带摄像头,通过传感器的设置,实现了在检测 到人体情况时,切换为人体消毒模式,利用正前端的消毒喷洒口对人 体进行直接喷雾消毒,以及利用紫外线灯存槽的紫外线灯进行紫外线 照射消毒,但该装置需要定期进行补液,且散热孔9会存在灰尘堆积 影响散热的情况,对此提出对该机器人进行一定的创新。
[0045]
工作开始前,向消毒液存箱6内部进行消毒混合液的补充,同时 的,打开补给箱阀门将消毒混合液灌入消毒液补给箱5中,当对周边 环境或者人体进行消毒时,接通电源,由于电性连接,机器人启动, 利用遥控调控模式,当开始进行消毒时,由于电性连接,水液泵7开 始进行工作,从而抽动消毒液存箱6内部的水液进行向上流动,在消 毒水液沿着喷洒机构内管道的管壁进行上冲时,消毒水液在流动的路 径上对水液转轮8进行水冲带动,此时水液转轮8开始进行转动,从 而带动顶触轮12进行转动,此时由于顶触轮12的凸轮结构设置,且 顶触轮12的短端与弹性挡板10之间不发生抵触,顶触轮12的长端 与弹性挡板10之间不发生抵触,弹性挡板10的弹力回复指向为逆时 针方向,在顶触轮12转动的过程中,长端对弹性挡板10进行顶开工 作,从而消毒液补给箱5内部的水液开始流入消毒液存箱6中,当短 端转动到弹性挡板10上端时,弹性挡板10上端的抵触力消失,此时 由于弹性挡板10的回复作用实现了弹性挡板10的向上闭合,由于第 二限位块21的设置,实现了对弹性挡板10的限位作用,在顶触轮 12的不断转动下,弹性挡板10实现了持续的开合作用,从而随着消 毒液存箱6内部水液的抽离实现了对消毒液存箱6内部水液的定量补 充功能,在上述过程中,通过消毒液存箱6内部损耗的水流冲力作用 和顶触轮12的结构设置,实现了在消毒液存箱6内部消毒液发生损 耗时对消毒液存箱6内部进行伴随性的消毒液定量补充功能。
[0046]
与此同时,随着转动杆11的转动,固定安装于转动杆11侧壁的 第一锥齿轮13开始进行转动,与第一锥齿轮13之间相啮合的第二锥 齿轮15同时进行转动,从而带动了转动轮16进行转动,由于连接杆 17与滑动杆19之间为滑动连接,在连接杆17伴随转动轮16进行转 动时,连接杆17侧壁的滑动杆18于滑动杆19内部进行滑动,从而 避免了连接杆17转动时的卡顿现象,在连接杆17的带动下,当连接 杆17随着转动轮16转动到上端时,能够对滑动杆19进行顶起作用, 当连接杆17随着转动轮16转动到下端时,带动滑动杆19进行下拉 运动,从而实现了在第二锥齿轮15转动的同时,带动了滑动杆19进 行往复的高低运动,由于滑动
杆19与散热孔9的连接端固定安装有 防静电除尘毛刷,在滑动杆19进行升降运动时,在不影响散热的情 况下实现对散热孔9的清洁功能,在上述过程中,利用消毒水的水冲 带动作用,以及连接杆17和滑动杆19的结构设置,实现了对散热孔 9内部端口的往复清洁功能。
[0047]
综上所述,本发明通过消毒液存箱6内部损耗的水流冲力作用和 顶触轮12的结构设置,实现了在消毒液存箱6内部消毒液发生损耗 时对消毒液存箱6内部进行伴随性的消毒液定量补充功能,此外,利 用消毒水的水冲带动作用,以及连接杆17和滑动杆19的结构设置, 实现了对散热孔9内部端口的往复清洁功能。
[0048]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范 围并不局限于此,任何熟悉本技术领域的技术人员在本发明揭露的技 术范围内,根据本发明的技术方案及其发明构思加以等同替换或改 变,都应涵盖在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1