外科工具夹取回馈装置及其方法与流程
1.本发明是有关于一种外科治疗装置,具体地说,是有关于一种外科工具夹取回馈装置及其方法。
背景技术:
2.微创手术是通过切割较小切口以及经由切口插入外科工具来治疗的方法,相对于传统切割较大切口的开放手术而言,微创手术的切口较小,可减少术后恢复时间、降低疼痛、减少伤痕,因而广泛用于外科手术上。
3.然而,相对于开放手术可清楚看到手术工具对器官和组织的作用,微创手术在视觉和触觉方面有诸多限制,由于缺乏直接的触感回馈,外科医师不易察觉手术工具对器官和组织的作用力道或是施加的能量是否适中,往往需要依靠经验和内窥镜检查才能确定器官或组织是否完好或有损坏,因而,微创手术对于外科医师仍存在很多困难需要克服。
技术实现要素:
4.本发明的目的在于一种外科工具夹取回馈装置及其方法,可于使用者进行外科手术时,提供夹钳的夹持回馈力道或操作柄的握持回馈力道,以回应使用者的操作。
5.为达到上述目的,本发明提供一种外科工具夹取回馈装置,包括:外科工具,包括机体、谐波刀头、夹钳以及操作柄,其中该机体用以安装该谐波刀头,该谐波刀头用以安装该夹钳并输出超音波至该夹钳,该操作柄可活动地设置于该机体,该操作柄用以握持以操作该夹钳;力回馈感测器,与该操作柄连动以侦测该操作柄的握持回馈力道;以及回馈处理单元,用以接收该操作柄的该握持回馈力道,以对应输出指示讯号。
6.较佳的,该力回馈感测器设置于该机体中并与该操作柄连动。
7.较佳的,该回馈处理单元包括触发器,该操作柄的枢接端对应连接该触发器,且当该操作柄的该枢接端位移而输出机械能至该触发器时,该操作柄推动该触发器。
8.较佳的,该回馈处理单元包括触发器、马达以及连杆,该连杆连接该触发器及该马达,该马达输出机械能至该连杆,使该连杆带动该触发器产生位移,且该马达受控于该操作柄,以控制该马达推动该触发器。
9.较佳的,该操作柄与该马达之间以无线通讯方式传输该感应讯号。
10.较佳的,该机体包括安装部以及把手部,该安装部具有套筒,用以安装该谐波刀头,该把手部位于该安装部下方,且该把手部与该操作柄配合使用。
11.较佳的,该把手部可插拔地设置于该安装部,该操作柄枢设于该把手部。
12.较佳的,该操作柄枢设于该安装部。
13.较佳的,该回馈处理单元包括指示器,该指示器包括至少一灯信号,用以显示该指示讯号的强度;及/或,该回馈处理单元包括扬声器,该扬声器产生至少一音频,用以表示该指示讯号的强度。
14.较佳的,该力回馈感测器包括压力感测器或拉力感测器。
15.为达到上述目的,本发明还提供一种外科工具夹取回馈方法,用于外科手术,该外科工具包括机体、谐波刀头、夹钳以及操作柄,其中该机体用以安装该谐波刀头,该谐波刀头用以安装该夹钳并输出超音波至该夹钳,该操作柄可活动地设置于该机体,用以握持以操作该夹钳,该方法包括:施力于该操作柄;侦测该夹钳的夹持回馈力道或侦测该操作柄的握持回馈力道;以及根据该夹钳的该夹持回馈力道或该操作柄的该握持回馈力道,对应输出指示讯号。
16.较佳的,该谐波刀头中设有力回馈感测器,该力回馈感测器与该夹钳连动以侦测该夹钳的该夹持回馈力道;或者,该夹钳的钳口中设有力回馈感测器,该力回馈感测器与该夹钳连动以侦测该夹钳的该夹持回馈力道。
17.较佳的,该机体中设有力回馈感测器,该力回馈感测器与该操作柄连动以侦测该操作柄的该握持回馈力道。
18.较佳的,该机体中设有触发器,该操作柄的枢接端对应连接该触发器,且当该操作柄的该枢接端位移而输出机械能至该触发器时,该操作柄推动该触发器。
19.较佳的,该机体中设有触发器、马达以及连杆,该连杆连接该触发器及该马达,该马达输出机械能至该连杆,使该连杆带动该触发器产生位移,且该马达受控于该操作柄,以控制该马达推动该触发器。
20.较佳的,该操作柄与该马达之间以无线通讯方式传输该感应讯号。
21.较佳的,该指示讯号包括至少灯信号,用以显示该指示讯号的强度;及/或,该指示讯号包括至少音频,用以表示该指示讯号的强度。
22.与现有技术相比,提供夹钳的夹持回馈力道或操作柄的握持回馈力道,以回应使用者的操作,使腹腔镜手术更清晰、手术时间缩短以克服传统微创手术在视觉和触觉方面的诸多限制。
附图说明
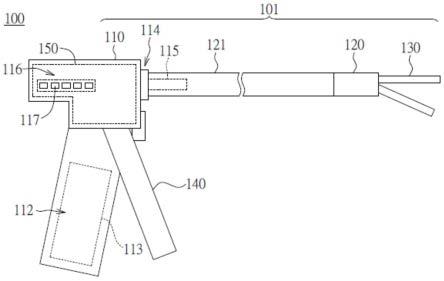
23.图1绘示依照本发明一实施例的外科工具夹取回馈装置的外观示意图;
24.图2a绘示依照本发明一实施例的刀头的内部示意图;
25.图2b绘示依照本发明另一实施例的刀头的内部示意图;
26.图3a绘示依照本发明一实施例的外科工具夹取回馈装置的内部操作示意图;
27.图3b绘示依照本发明另一实施例的外科工具夹取回馈装置的内部操作示意图;以及
28.图4绘示依照本发明一实施例的外科工具夹取回馈方法的流程示意图。
具体实施方式
29.为使对本发明的目的、构造、特征、及其功能有进一步的了解,兹配合实施例详细说明如下。
30.现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的实施方式。相反,提供这些实施方式使得本发明将全面和完整,并将示例实施方式的构思全面地传达给本领域具有通常知识者。在图中相同的附图标记表示相同或类似的结构,因而将省略对它们的重复描述。
31.图1绘示依照本发明一实施例的外科工具夹取回馈装置100的外观示意图。外科工具101包括机体110、谐波刀头120、夹钳130以及操作柄140,机体110用以安装谐波刀头120,谐波刀头120用以安装夹钳130并输出超音波至夹钳130,操作柄140可活动地设置于机体110,用以供使用者握持以操作夹钳130。
32.外科工具101例如是腹腔镜手术所使用的工具,包括电烧剪刀、组织夹持器及剥离器等,腹腔镜镜头可插入腹腔内,使拍摄的影像可经由光纤导管传到讯号处理系统,并即时显示在显示屏幕上。谐波刀头120又称为超音波刀,可通过超音波频率发生器使金属刀头以超音波频率进行机械振荡,使组织内的水分子、蛋白质氢键断裂、细胞崩解、组织被切开或者凝固,以及利用夹钳130夹住血管使血管闭合。谐波刀头120对于周围组织的损伤远小于电刀,可更精准的控制切割与止血动作,可协助地在重要脏器和大血管旁边进行分离切割,并且不会产生烟雾影响手术视野,使腹腔镜手术更清晰、手术时间缩短。
33.请参照图1,机体110包括把手部112、安装部114以及灯信号显示部116,机体110的安装部114前方具有套筒115,用以安装谐波刀头120及其延伸杆件121。此外,机体110的把手部112位于安装部114下方,把手部112与操作柄140配合使用,以供使用者握持。操作柄140可枢设于安装部114下方或是枢设于把手部112。把手部112可插拔地设置于安装部114,以使把手部112及操作柄140可与安装部114分离。此外,机体110的把手部112内部具有容纳空间113,可用以安装电池或其他装置(例如力回馈感测器)。机体110的把手部112亦可安装显示装置(图未绘示),用以显示切口内部的摄影机所撷取的影像。另外,机体110的灯信号显示部116位于安装部114后方,可对应输出指示讯号,以供使用者观看。指示讯号例如以led灯117表示或以音频表示。led灯117可显示不同色彩的灯信号或多个连续显示的led灯信号,音频可为不同音域或不同音源所发出的高频或低频讯号。
34.请参照图2a及图2b,其绘示依照本发明一实施例的外科工具夹取回馈装置100的内部示意图。力回馈感测器132设置谐波刀头120内或夹钳130的钳口131中,且力回馈感测器132可与夹钳130连动以侦测夹钳130的夹持回馈力道。力回馈感测器132例如是压力感测器、拉力感测器、位移感测器、阻抗感测器或其他可侦测夹持力道的感测器。在本实施例中,只要夹钳130夹住组织或血管,力回馈感测器132可直接反应出夹钳130的夹持力道,以回应使用者的操作。
35.请参照图3a及图3b,其绘示依照本发明另一实施例的外科工具夹取回馈装置100的内部示意图。在另一实施例中,力回馈感测器144亦可设置在机体110中并与操作柄140连动,用以侦测操作柄140的握持回馈力道。力回馈感测器144例如是压力感测器、拉力感测器、位移感测器、阻抗感测器或其他可侦测握持力道的感测器。在本实施例中,只要夹钳130夹住组织或血管,力回馈感测器144可直接反应出操作柄140的握持力道,且操作柄140的握持力道大致上正比于夹钳130的夹持力道,以回应使用者的操作。在图3a中,操作柄140与力回馈感测器144可设置于机体110的安装部114下方。在图3b中,操作柄140与力感测器144可设置于机体110的把手部112。
36.请参照图1、图3a及图3b,回馈处理单元150设置于机体110内,用以接收夹钳130的夹持回馈力道或操作柄140的握持回馈力道,以对应输出指示讯号,回应使用者的操作。在图3a中,回馈处理单元150包括触发器152,而操作柄140的枢接端142对应连接触发器152,使用者可握持操作柄140而使枢接端142产生位移。当操作柄140的枢接端142位移而输出机
械能至触发器152时,操作柄140可顺势推动触发器152。因此,谐波刀头120及夹钳130可受控于操作柄140而产生夹取动作。
37.此外,在图3b中,回馈处理单元150可包括触发器152、马达154以及连杆156,连杆156的两端分别连接至触发器152及马达154,马达154可输出机械能至连杆156,使连杆156带动触发器152产生位移。此外,马达154受控于操作柄140,以控制马达154推动触发器152。因此,谐波刀头120及夹钳130可受控于操作柄140而产生夹取动作。
38.也就是说,在图3b中,操作柄140与马达154之间例如以无线通讯方式传输感应讯号,当操作柄140受力而移动时,回馈处理单元150可接收感应讯号,以启动马达154并推动触发器152。
39.另外,请参照图3a及图3b,回馈处理单元150可包括指示器,例如是led灯117或其他光源,指示器包括至少灯信号,用以显示指示讯号的强度。例如,指示器通过led灯117的点亮或者熄灭数量的多少表示夹钳130的夹持回馈力道或操作柄140的握持回馈力道,例如,灯信号越多表示力道越强,反之,灯信号越少表示力道越弱。
40.在另一实施例中,回馈处理单元150可包括扬声器118,例如是喇叭或其他发声装置,扬声器118可产生至少一音频,用以表示指示讯号的强度。例如,扬声器118通过声音的高低表示夹钳130的夹持回馈力道或操作柄140的握持回馈力道,例如,声音越高表示力道越强,反之,声音越低表示力道越弱。
41.由上述说明可知,本实施例的外科工具夹取回馈装置100将指示器117及/或扬声器118安装在机体110上,用以产生灯信号及/或音频,提供视觉及/或听觉的回馈,让使用者得知夹钳130的夹持回馈力道或操作柄140的握持回馈力道,以回应使用者的操作,因此,本发明可克服传统微创手术在视觉和触觉方面的诸多限制。
42.另外,请参照图4,其绘示依照本发明一实施例的外科工具夹取回馈方法的流程示意图,下述步骤例如以图1所示的外科工具夹取回馈装置100实施,但不以此为限,外科工具夹取回馈装置100可包括外科工具101、力回馈感测器132(144)以及回馈处理单元150。在步骤s110中,使用者施力于操作柄140,以进行夹取动作。在步骤s120中,根据图2a及图2b所示的力回馈感测器132来侦测夹钳130的夹持回馈力道,或在步骤s130中,根据图3a及图3b所示的力回馈感测器144侦测操作柄140的握持回馈力道,回馈力道用以表示外科工具101对器官和组织的作用力。在步骤s140中,计算回馈力道,将回馈力道传至回馈处理单元150,以供回馈处理单元150根据回馈力道判断外科工具101是否夹持组织或血管。在步骤s150中,回馈处理单元150判断回馈力道是否大于等于一设定值,若小于设定值,则进行步骤s160,不推动谐波刀头120。反之,若大于等于设定值,则进行步骤s170,推动谐波刀头120,并输出一指示讯号,以回应使用者的操作。指示讯号以视觉或听觉的方式表示夹钳130的夹持回馈力道或操作柄140的握持回馈力道,以克服传统微创手术在视觉和触觉方面的诸多限制。
43.综上所述,虽然本发明已以实施例揭露如上,然其并非用以限定本发明。本发明所属技术领域中具有通常知识者,在不脱离本发明之精神和范围内,当可作各种之更动与润饰。因此,本发明之保护范围当视后附之申请专利范围所界定者为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1