手术视频智能采集系统
1.本发明涉及一种视频采集系统,具体来说,是一种应用于手术室的专用视频智能采集系统。
背景技术:
2.随着信息化进程的发展,社会方方面面的进步及需求,医疗对各种影像及视频方面的技术需求越来越高,应用范围也越来越广。手术视频方面,医疗界需要对手术中的视频资料进行实时采集、传输和保存,以实现远程实时会诊与示教,以及后期的教学观摩、案例研究、医疗纠纷取证等多方面的应用,对一线医师梯队培养、远程医疗合作、医院工作管理、医患纠纷调查等极具现实意义。而目前现有的影像采集方式都存在各自的问题。
3.传统的手术影像采集通常是由摄像师穿戴好专业的手术室装束进入手术室进行长时间现场手持或肩扛拍摄,工作强度大,且由于无菌和人员流动要求,为了不干扰主刀医师,还需要经常变换拍摄角度,即使如此也往往无法获得很好的拍摄视野和角度。
4.因此需要有一种位于手术台上方,且摄像机位置和拍摄角度可以调节的视频采集设备,从多个角度进行手术区域的画面采集、录制或远程直播。
5.部分医院手术室通过在无影灯内安装摄像头的方式(cn 202443229 u)实现自动拍摄,但该装置无法在不同手术室之间移动,安装部署困难,功能有限且成本高。另外,如果要改变拍摄角度,就需要将无影灯同样调整到相应的角度,影响手术的正常进行。虽然也可以在无影灯上安装可调节轨道从而避免拍摄视角调节对无影灯照射角度的影响(cn 209805936u),但拍摄视角的调节范围依然较小,灵活度不足。
6.另外还有一些使用可调节支座(cn 205007048 u,cn 204180166u,cn 210644079u)甚至可移动平台(cn 201831960 u,cn201912230u,)的拍摄方案,但摄像头的位置和转向调节依然依靠人手把持来实现,当摄像头位于高处时,由于会违反无菌规则,手术过程中主刀医生无法自己调节拍摄位置。由他人调节则会导致拍摄角度无法和主刀医生的手术思路相一致,无法突出手术的重点。
7.除此之外,还有头戴式的手术视频采集设备(cn 104796669 b),包括智能眼镜、头箍等类型,但这种方式给主刀医生带来了额外的负担,尤其不适合本身就需要佩戴眼镜的医生,不方便长时间使用,且受限于摄像器材的尺寸和重量,视频分辨率不足,画面晃动严重,拍摄质量欠佳,且角度固定为主刀医生视角,无法随意调节。
技术实现要素:
8.针对上述问题,本发明提出一种手术视频智能采集系统,解决现有手术视频采集系统安装部署费时费力,拍摄视角不理想,视频质量不佳,智能化程度不高等问题。
9.本发明手术视频智能采集系统,包括底座、升降立柱、可调节显示器、水平机械臂和;手持靶标。
10.所述底座后侧上方安装操作面板;前侧顶部位置和角度可调显示器与升降立柱。
水平机械臂具有三个关节,实现三个悬臂的水平摆动;水平机械臂末端安装于升降立柱顶端,由升降立柱控制其升降。水平机械臂前端安装有相机调姿云台,相机调姿云台上安装视频采集相机;同时视频采集相机上安装有靶标识别相机,且两者拍摄视野相同。
11.所述手持靶标下部具有用于手持的握柄,握柄底端开有透光孔,内部安装激光指示器,激光指示器沿手持握柄轴向发射激光,发射端朝向透光孔;手持靶标顶面周向沿握柄轴线周向等角度间隔安装有红外led。
12.通过调整手持靶标位置,使激光指示器发射出的激光点对准术区;此时,由靶标识别相机对各个红外led进行识别,并将识别图像传输给设备主机,由设备主机利用各个红外led灯的空间坐标,计算出全部红外led所组成的图形中心点位置和法线方向,从而得出手持靶标的空间位置及姿态;随后根据手持靶标轴线位姿获得手持靶标轴线延长线与水平机械臂工作平面的交点,再根据水平机械臂结构参数进行运动学逆解,获得水平机械臂各关节需转动的角度,进而控制水平机械臂各关节转动,使末端视频采集相机达到指定位姿,使视频采集相机拍摄期间始终朝向手术部位。
13.本发明中还在水平机械臂末端关节上方设置全局三维相机,同时在水平机械臂末端悬臂上下位置安装有激光雷达,实现对周边环境的感知能力,实现避障功能;
14.本发明的优点在于:
15.1、本发明手术视频智能采集系统,可快速部署,可以在术前准备阶段将本系统推入手术室,连接上电源线即可开机使用,如需远程实时传输,只需要再连接网络即可;
16.2、本发明手术视频智能采集系统,视频质量高,可以选择高性能摄像头,可达到4k分辨率和20倍光学变焦,画面稳定无晃动;
17.3、本发明手术视频智能采集系统,摄像机位于高处,拍摄视角好,升降高度可调节,不影响术者的活动;
18.4、本发明手术视频智能采集系统,水平多关节机械臂,臂展范围大,收拢尺寸小,兼顾了工作中的视野调节范围和收拢后的移动便利性;
19.5、本发明手术视频智能采集系统,拍摄角度的调节不影响无影灯的照射角度;
20.6、本发明手术视频智能采集系统,机械臂各关节均为电机驱动,术者无需和高处的设备本体接触,符合无菌操作规定;
21.7、本发明手术视频智能采集系统,术者不需要佩戴头戴式设备,不给术者带来额外负担;
22.8、本发明手术视频智能采集系统,拍摄角度的调节、画面的缩放等均可由术者通过手持靶标直接发出指令,系统根据指令自动调节,无需指导他人操作,对术者意图的领会更加准确,调节效率更高;
23.9、本发明手术视频智能采集系统,带有激光雷达和三维相机,具有对周边环境的感知能力,实现避障功能;
24.10、本发明手术视频智能采集系统,靶标识别相机同时具备视线遮挡感知能力,能根据视野内的障碍自动避让,减少或避免拍摄视野被遮挡;
附图说明
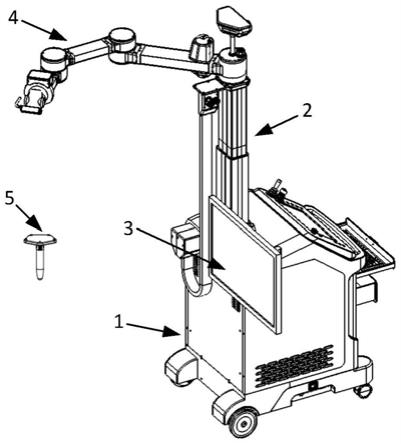
25.图1为本发明手术视频智能采集系统整体结构示意图。
26.图2为本发明手术视频智能采集系统中底座结构示意图。
27.图3为本发明手术视频智能采集系统中可调节显示器结构示意图。
28.图4为本发明手术视频智能采集系统中水平机械臂结构示意图。
29.图5为本发明手术视频智能采集系统中手持靶标结构示意图。
30.图中:
[0031]1‑
底座
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ2‑
升降立柱
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ3‑
可调节显示器
[0032]4‑
水平机械臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ5‑
手持靶标
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
101
‑
支撑轮
[0033]
102
‑
操作面板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102a
‑
触控显示屏
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
102b
‑
操纵杆
[0034]
102c
‑
按钮
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
103
‑
上层抽屉
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
104
‑
下层抽屉
[0035]
301
‑
显示器
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302
‑
万向自平衡支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302a
‑
支座
[0036]
302b
‑
第一摇臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
302c
‑
第二摇臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
401
‑
第一关节
[0037]
402
‑
第一悬臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
403
‑
第二关节
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
404
‑
第二悬臂
[0038]
405
‑
第三关节
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
406
‑
第三悬臂
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
407
‑
相机调姿云台
[0039]
408
‑
视频采集相机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
409
‑
靶标识别相机
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
410
‑
全局三维相机
[0040]
411
‑
上激光雷达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
412
‑
下激光雷达
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
501
‑
上部外壳
[0041]
502
‑
下部握柄
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
503
‑
红外led
具体实施方式
[0042]
下面结合附图对本发明作进一步详细说明。
[0043]
本发明手术视频智能采集系统,包括底座1、升降立柱2、可调节显示器3、水平机械臂4和手持靶标5,如图1所示。
[0044]
所述底座1为无动力的移动平台,整体呈立方体结构,底面周向四角位置安装支撑轮101,其中,前侧两个支撑轮101为定向轮,后侧两个支撑轮101为万向轮,且万向轮带有脚踏刹车,便于底座1移动到指定位后的固定。底座1后侧上方具有向前倾斜的斜面,该斜面上固定安装有操作面板102,如图2所示,操作面板102包括触控显示屏102a、操纵杆102b、按钮102c。其中,触控显示屏102a用于观察拍摄画面及实现人机交互;操纵杆102b用于控制水平机械臂4及其上安装的相机调姿云台407运动;按钮102c包括急停按钮、开机按钮、画面切换按钮、开始运行按钮、安全保护按钮、立柱升降按钮及画面缩放按钮,分别用于系统急停、开关机控制、双主机画面切换、安全保护、控制立柱升降及控制画面缩放。其中,急停按钮用于在紧急状况下立即停止设备;开关机按钮用于控制底座内部主机的开关机,画面切换按钮用于实现可调节显示器3和触控显示屏102a间的画面切换;安全保护按钮在按下时才能使用摇杆操作水平机械臂,用于提供安全保护;升降立柱按钮用于控制立柱上升与下降,画面缩放按钮用于控制手术拍摄视频的画面缩放。同时在底座1的后侧,操作面板102下方位置设计空腔,空腔两侧通过滑轨安装有两层抽拉式抽屉;其中上层抽屉103作为键盘鼠标托架,内部用于放置键盘与鼠标。下层抽屉104作为储物抽屉,内部用于收纳电源线,耳麦以及手持靶标5等附件。上述底座1的内部安装有设备主机、电源、音响设备以及其他各类控制器件;同时底座1的左右侧壁下方设计开孔用于加强底座1的散热能力。
[0045]
所述可调节显示器3由显示器301和万向自平衡支架302构成,如图3所示。其中,万向自平衡支架302包括支座302a、第一摇臂302b与第二摇臂302c。其中,支座302a固定安装
于移动底座1顶面后侧夹角位置;第一摇臂302b竖直设置,底端与支座302a顶端间通过螺纹连接固定。第二摇臂302c水平设置,末端与第一摇臂302b顶端间通过带阻尼的虎克铰连接;第二摇臂302c末端与显示器301背侧中心位置通过带阻尼的虎克铰连接;由此,通过万向自平衡支架302,可手动调节显示器301的位置和角度,用于向术者展示由摄像机所采集到的视频画面。
[0046]
所述升降立柱2为矩形截面的多根立柱内外嵌套滑动连接构成的可升降结构,其底部固定安装在底座1顶面后侧设计的插口内,顶端安装有机械臂安装平台,用于安装水平机械臂4,实现水平机械臂4整体工作高度调节。
[0047]
所述水平机械臂4包括第一关节401、第一悬臂402、第二关节403、第二悬臂404、第三关节405、第三悬臂406、相机调姿云台407、视频采集相机408、靶标识别相机409、全局三维相机410、上激光雷达411与下激光雷达412,如图4所示。
[0048]
其中,第一关节401、第二关节403、第三关节405均为水平旋转关节,具有由伺服电机驱动的上下旋转体。其中,第一关节401通过下旋转体固定安装于前述机械臂安装平台上上旋转体侧壁上设计有连接头。第二关节403与第三关节405的上下旋转体侧壁上均设计有连接头;第二关节403的下旋转体侧壁连接头与第一关节401的上旋转体侧壁连接头间通过水平设置的第一悬臂402相连;第二关节403的上旋转体侧壁连接头与第三关节405的上旋转体侧壁连接头间通过水平设置的第二悬臂404相连;水平设置的第三悬臂406末端与第三关节405侧壁连接头间相连;由此使第一悬臂402、第二悬臂404、第三悬臂406可绕各自对应的关节转动。上述第三悬臂406前端安装相机调资云台,由相机调姿云台407实现其上安装的视频采集相机408的俯仰和偏转角度。视频采集相机408上还通过支架固定安装有靶标识别相机409,两者的拍摄视野相同;由此在视频采集相机408俯仰和偏转角度调节过程中,靶标识别相机409随动,实现视频采集相机408与靶标识别相机409在整个过程中视野始终保持一致,由视频采集相机408采集手术部位的视频图像,同时靶标识别相机409识别手持靶标5的指向。
[0049]
上述第一关节401的上方设置全局三维相机410,全局三维相机410安装于相机框架内,相机框架设计有插口,插口与支撑杆顶端间螺纹连接固定中,支撑杆由上至下依次穿过第一关节401的上旋转体顶面开孔
‑
第一关节401内部伺服电机空心轴
‑
第一关节401的下旋转体底面开孔后,固定于机械臂转安装平台上,使全局三维相机410不随第一关节401转动,通过全局三维相机为系统提供整个系统前方的三维场景地图,用于判断系统前方的物体如无影灯、以及术者等医护人员的位置。
[0050]
所述上激光雷达411与下激光雷达412分别安装于第一悬臂402末端上下相对位置,其中,上激光雷达411探测位置高于整个水平机械臂,下结构雷达411探测位置低于整个水平机械臂,通过上激光雷达411与下激光雷达412分别扫描水平机械臂4上下两侧的障碍物信息,且与全局三维相机410配合,可以形成对水平机械臂4周围环境的感知,尤其是检测水平机械臂4运动空间内的障碍分布情况,使水平机械臂4具有避障和防碰撞等功能。
[0051]
所述手持靶标5具有上部外壳501、下部握柄502、红外led503、激光指示器、控制模块、无线通信模块以及控制按键,如图5所示。
[0052]
所述下部握柄502顶端与上部外壳501底面间通过螺纹连接同轴固定。上部外壳顶面,以顶面中心为圆点周向等角度间隔内嵌五个红外led503。下部握柄2底端端部设计有透
光孔,透光孔处安装透明材料密封罩。
[0053]
所述激光指示器、控制模块、无线通信模块均安装于下部握柄502内固定的支架上,固定支架上开有电池仓,用于安装电池为手持靶标供电。
[0054]
上述激光指示器位于发射端正对前述透光孔,通过透光孔发射从靶标底部发射出激光,用于辅助术者判断靶标是否正确指向手术部位。控制模块通过接收控制按键发来的各种控制指令,实现对标靶的整体控制以及通过无线通信模块完成与视频采集系统的设备主机间无线信号传输。
[0055]
上述控制按键包括电源开关按钮、画面放大按钮、画面缩小按钮与位姿调节按钮。其中,电源开关按钮用来向控制模块发送开关机指令,控制靶标5的开关机。画面放大按钮和画面缩小按钮分别用来向控制模块发送放大与缩小控制指令,由控制模块将控制指令通过无线通信模块传输给视频采集系统的设备主机,由设备主机控制视频采集相机408画面的缩放。位姿调节按钮用于向控制模块发送位姿调节指令,由控制模块将位姿调节指令通过无线通信模块传输给视频采集系统的设备主机,由设备主机控制机械臂与云台实现视频采集系统的位姿调节。上述下部握柄502上还安装有led电源指示灯,用于显示手持靶标5的开关机状态。
[0056]
在本发明手术视频智能采集系统时,通过手持靶标5,使激光指示器发射处的激光点对准术区;此时,具备红外拍摄功能的靶标识别相机409可对5个红外led503进行识别,并将识别图像传输给设备主机,由设备主机利用各个红外led 503的空间坐标,计算出它们所组成的五边形的中心点位置和法线方向,从而得出手持靶标5的空间位置及姿态。随后根据手持靶标5轴线位姿获得手持靶标5轴线延长线与水平机械臂4工作平面的交点,再根据水平机械臂4结构参数进行运动学逆解,获得水平机械臂4各关节需转动的角度,进而控制水平机械臂4个关节及相机调姿云台407运动,使末端视频采集相机408达到指定位姿,使其在系统正常拍摄期间始终朝向手术部位。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1