一种CT诊断床推拉助力控制方法与流程
一种ct诊断床推拉助力控制方法
技术领域
1.本发明涉及ct技术领域,尤其涉及一种ct诊断床推拉助力控制方法。
背景技术:
2.在扫描结束时,医生通常会选择握住诊断床床尾部的手柄,快速将床板拉出。手动推拉床板虽然是最为快捷方便的,但还存在着以下情况:当个别病人体重较重,或个别医生力气较小时,很难将病人拉出。
3.基于此,本案由此提出。
技术实现要素:
4.为解决上述问题,本发明的目的在于提供一种ct诊断床推拉助力控制方法,实现诊断床的推拉助力。
5.为了实现上述目的,技术方案如下:一种ct诊断床推拉助力控制方法,包括以下步骤:通过上位机软件设定启动电流值和诊断床停止水平运动的容许时间;使用时,在系统已经停止扫描且诊断床已经停止运动的前提下,计算患者的体重;系统实时监控水平伺服电流是否超出设定的启动电流值,若超出设定的启动电流值,则诊断床解除锁定,反之,继续监控;同时系统确定伺服电流值的方向;诊断床解除锁定,系统根据此时水平伺服电流值的方向和患者体重,通过电机输出合适的助力力矩;诊断床接除锁定状态过程中,系统监控诊断床是否停止水平运动超过容许时间,若未超过容许时间,则继续保持解除锁定状态,反之,则对诊断床进行锁定并取消助力力矩。
6.进一步的,所述启动电流值的设定包括以下步骤:操作人员根据自身力量推拉诊断床,系统采集此时的水平伺服电流值并显示在操作界面上,操作人员根据自身需要适当减小该值,减小后的电流值作为启动电流值录入系统。
7.进一步的,在计算患者体重之前,系统需要监控诊断床水平伺服电流是否稳定,若不稳定,则继续监控,若稳定,则进行患者体重计算。
8.进一步的,所述助力力矩值的确定包括以下步骤:测试阶段时,录入体重
‑
力矩表,体重
‑
力矩表包括不同体重下所需的助力力矩的大小值;使用阶段时,系统根据伺服电流值的方向和患者体重,在体重
‑
力矩表中确定最接近患者体重的的助力力矩。
9.进一步的,所述患者体重的计算包括如下步骤:系统检测垂直伺服电机的转矩t,根据计算出患者体重,其中g表示外部载荷(即患者体重),p为诊断床的丝杠
导程,α为诊断床杆件与水平面的夹角。
10.本发明的优点在于:通过伺服电流判断推拉力的方向和患者的体重,并采用电机助力,方便医生用很小的力将床板拉出。
附图说明
11.图1为实施例中向后推床时,水平伺服电流的变化示意图;图2为实施例中向前拉床时,水平伺服电流的变化示意图;图3为实施例中体重计算的原理示意图;图4为ct诊断床锁定控制方法流程框图;图5为ct诊断床推拉助力控制方法流程框图。
具体实施方式
12.以下结合实施例对本发明作进一步详细描述。
13.如图4和图5,本实施例提出两种控制方法,其中图5中的ct诊断床推拉助力控制方法是基于图4中的ct诊断床锁定控制方法实现的,故本实施例先描述ct诊断床锁定控制方法。
14.本实施例ct诊断床锁定控制的原理说明如图1和图2所示。现在ct诊断床都需要高精度定位,传动都是通过高精度的伺服系统,伺服系统可以对各阶段的力矩进行监控,当医生在推拉床时,此信号也可以方便的被采集到。图1和图2为在床板使能且停止时拖拉床板时的水平伺服电机的电流变化情况,又因为电机力矩与电机电流成正比关系,基于此特性,我们还能通过电机电流算出电机力矩,这样我们可以方便的知道床板水平的受力情况,包括力的方向和力的大小。
15.伺服控制器可通过模拟量输出口将此时的电机电流值转换成模拟量信号,也可以通过总线将电流信号送出,控制器可直接读取伺服控制器输出的模拟量或者总线数据,判断床板的受力情况。通过程序设计,可设定当电机的电流值大于设置值时,控制器控制锁定单元解除床板锁定,当床板停止水平运动时间大于设定时间时,控制器控制锁定单元锁定床板。
16.ct诊断床锁定控制方法具体可见图4,在使用前,通过上位机软件设定启动电流值和诊断床停止水平运动的容许时间;使用时,具体包括以下流程:t1. 系统监控当前是否处于扫描状态,若仍处于扫描状态,则保持当前运作并继续监控,若未处于扫描状态,则进入步骤t2;t2. 系统监控诊断床当前是否处于停止状态,若仍处于运动状态,则继续保持当前状态并返回步骤t1,若处于停止状态,则进入步骤t3;t3. 此时由于已经停止扫描,且诊断床处于停止状态,操作人员可推拉床体,推拉床体时产生水平伺服电流,而系统是通过判定水平伺服电流是否大于启动电流值,来确定当前诊断床是否正在被推拉;若水平伺服电流大于启动电流,则确定诊断床正在被推拉,进入t4,否则返回步骤t1;t4. 控制器解除床板锁定,床板可被推拉移动,当推拉到位后,系统需要判定诊断床是否处于静止状态,来完成床板锁定步骤,此时系统可判定诊断床是否停止水平运动超
过容许时间,若超过容许时间,则控制器控制床板锁定,若未超过容许时间,则保持解锁状态并重新判定是否可锁定床板。
17.所述启动电流值的设定包括以下步骤:操作人员根据自身力量推拉诊断床,系统采集此时的水平伺服电流值并显示在操作界面上,操作人员根据自身需要适当减小该值,减小后的电流值作为启动电流值录入系统。而容许时间是根据实际操作环境来设定的。
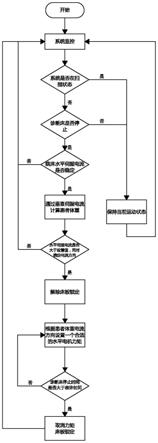
18.如图5所示,ct诊断床推拉助力控制方法包括以下步骤,在使用前,通过上位机软件设定启动电流值和诊断床停止水平运动的容许时间;使用时,具体包括以下流程:s1. 系统监控当前是否处于扫描状态,若仍处于扫描状态,则保持当前运作并继续监控,若未处于扫描状态,则进入步骤s2;s2. 系统监控诊断床当前是否处于停止状态,若仍处于运动状态,则继续保持当前状态并返回步骤s1,若处于停止状态,则进入步骤s3;s3. 通过垂直伺服电流计算患者体重;并进入步骤s4s4. 此时由于已经停止扫描,且诊断床处于停止状态,操作人员可推拉床体,推拉床体时产生水平伺服电流,系统通过判定水平伺服电流是否大于启动电流值,来确定当前诊断床是否正被推拉;若水平伺服电流大于启动电流,则确定诊断床被推拉,进入s5,否则返回步骤s1;同时根据电流方向确定此事的推拉方向;s5. 控制器解除床板锁定,床板可被推拉移动;s6. 本实施例通过水平伺服电机给予一个推拉助力力矩,来减轻操作人员的推拉负担,力矩的方向通过水平伺服电流的方向确定,力矩的大小是在前期调试阶段输入形成的,具体为:测试阶段时,录入体重
‑
力矩表,体重
‑
力矩表包括不同体重下所需的助力力矩的大小值,体重
‑
力矩表是通过实验确定的;使用阶段时,系统根据伺服电流值的方向和患者体重,在体重
‑
力矩表中确定最接近患者体重的的助力力矩;此处需要注意的是,此力矩不足以单独驱动床板,这样医生松手后床板可以自行停止;s7. 推拉结束后,需要对床板进行锁定,系统需要判定诊断床是否处于静止状态,来完成床板锁定步骤;此时系统判定诊断床是否停止水平运动超过容许时间,若超过容许时间,则控制器控制床板锁定,若未超过容许时间,则保持解锁状态并重新判定是否可锁定床板;s8. 床板锁定后,取消助力力矩。
19.在ct诊断床推拉助力控制方法的步骤s2和步骤s3之间还包括以下步骤:系统需要监控诊断床水平伺服电流是否稳定,若不稳定,则返回步骤s1继续监控,若稳定,则进入下一步进行患者体重计算。此步骤增加的原因是:病人刚躺到病床上时,伺服电流是不稳定的,此时可能导致误触发解除床板锁定功能和体重测算不准确。增加此步骤后,可在病人完全躺平后,即伺服电流稳定时进行后续操作。
20.步骤s3中采用垂直伺服电流测算患者体重的原理如图3所示:图3为诊断床的构造示意图,由力学知识可知,当诊断床承受的外部载荷为g时,为使结构保持静止,伺服电机传递给丝杠的的转矩为,其中t表示电机转矩,g表示外部载荷(即患者体重),p为丝杠导程,α为杆件与水平面的夹角。由上文中可知,电机电流可以算出电机力矩,所以ct系统可以监测垂直伺服电机的扭矩,来计算病人的体重,从而确定水平助力力矩的大小。
21.以上一直推/拉床的控制方法还可以扩展到快速的拉动两次床板触发其他的动作
指令等(类似的手势控制)。
22.上述实施例仅用于解释说明本发明的构思,而非对本发明权利保护的限定,凡利用此构思对本发明进行非实质性的改动,均应落入本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1