一种基于拉力与压力关系模型的骨间压力测量系统及方法
1.本发明一种基于拉力与压力关系模型的骨间压力测量系统及方法,属于骨间压力测量技术领域。
背景技术:
2.骨骼是人体最坚硬的组织,主要起到支撑身体、保护内脏、参与代谢的作用,还是人体运动系统的一部分,人的躯体执行一切正常的动作都离不开骨骼的支持,因此人体骨骼的健康程度对正常运动具备重要意义;而通常评判骨骼健康程度的其中一项指标便是,骨间的正常愈合与躯体自适应控制调整骨间压力的能力。
3.近些年来,针对骨间压力的检测方法进行了越来越多的研究,研究主要集中在外固定式和内嵌式检测技术两方面,而在这些研究中,真正应用于骨骼接合手术中压力检测技术的研究,要么少之又少,要么检测方法较为传统;骨间压力的检测非常重要,骨压检测精度将影响骨骼手术的成功率和患者术后的恢复速度,而在骨骼手术的临床治疗上,由于骨间压力大小受骨间隙大小尺寸等特质影响,导致骨间压力测量困难,测量方式基本全凭医生的经验或是对其进行粗略的压力估计,测量骨间隙大小尺寸和量化骨间压力大小的技术基本处于空白,因此有必要提出一种针对骨间压力进行测量的装置及方法。
技术实现要素:
4.本发明为了克服现有技术中存在的不足,所要解决的技术问题为:提供一种基于拉力与压力关系模型的骨间压力测量系统硬件结构及测量方法的改进。
5.为了解决上述技术问题,本发明采用的技术方案为:一种基于拉力与压力关系模型的骨间压力测量系统,包括静态应变测试装置,所述静态应变测试装置包括壳体,所述壳体的正面设置有显示屏和状态指示灯,所述壳体的内部封装有中央控制器和ad转换模块,所述ad转换模块的信号输出端通过导线与中央控制器相连;
6.所述中央控制器还通过导线分别与显示屏、状态指示灯、数据存储模块、数据通信模块相连;
7.所述中央控制器的电源输入端还与电源模块相连,所述电源模块的输入端通过电源线与电源箱相连;
8.所述数据通信模块还通过通信导线与测量计算机相连;
9.所述ad转换模块的信号输入端通过导线分别与拉力传感器、压力传感器的信号输出端相连;
10.所述拉力传感器与压力传感器具体安装在待测骨间压力的骨骼一侧,并在形成骨间压力的骨骼间隙中设置有间隙器;
11.所述间隙器具体为平面器件,在间隙器与骨骼间隙接触的一端设置有压力传感器,用于实时获取骨间压力信号,在间隙器的另一端设置有拉力传感器,用于实时获取对间隙器的拉力信号。
12.所述中央控制器内部使用的芯片为控制芯片u1,所述中央控制器内部的电路结构为:
13.所述控制芯片u1的1脚接3.3v电源;
14.所述控制芯片u1的5脚并接晶振y1的一端、电阻r1的一端后与电容c5的一端相连;
15.所述控制芯片u1的6脚并接晶振y1的另一端、电阻r1的另一端后与电容c6的一端相连,所述电容c5的另一端并接电容c6的另一端后接地;
16.所述控制芯片u1的7脚并接电阻r2的一端后与电容c7的一端相连,所述电阻r2的另一端接3.3v电源,所述电容c7的另一端接地;
17.所述控制芯片u1的12脚、13脚分别与串口端口p2相连;
18.所述控制芯片u1的14脚、15脚分别与ad转换模块连接;
19.所述控制芯片u1的20脚与电阻r4的一端相连;
20.所述控制芯片u1的21脚、22脚分别与显示屏的信号输入端相连;
21.所述控制芯片u1的23脚并接电容c1的一端后接地;
22.所述控制芯片u1的24脚与电容c1的另一端相连;
23.所述控制芯片u1的25脚与状态指示灯的控制端相连;
24.所述控制芯片u1的34脚、37脚分别与数据下载端口p1相连;
25.所述控制芯片u1的35脚并接电容c2的一端后接地;
26.所述控制芯片u1的36脚与电容c2的另一端相连;
27.所述控制芯片u1的44脚与电阻r3的一端相连,所述电阻r3的另一端并接电阻r4的另一端后接地;
28.所述控制芯片u1的47脚并接电容c3的一端后接地;
29.所述控制芯片u1的48脚与电容c3的另一端相连。
30.所述ad转换模块内部使用的芯片为转换器u2,所述ad转换模块内部的电路结构为:
31.所述转换器u2的1脚通过导线分别与三极管q1的发射极、转换器u2的16脚相连;
32.所述转换器u2的2脚与三极管q1的基极相连;
33.所述转换器u2的3脚并接三极管q1的集电极、电容c10的一端后与电阻r7的一端相连;
34.所述转换器u2的4脚并接电阻r7的另一端后与电阻r8的一端相连;
35.所述转换器u2的5脚并接电阻r8的另一端、电容c10的另一端后与电容c11的一端相连;
36.所述转换器u2的6脚与电容c11的另一端相连;
37.所述转换器u2的7脚并接电容c8的一端后与传感器接口jp1的4脚相连;
38.所述转换器u2的8脚并接电容c8的另一端后与电阻r5的一端相连,所述电阻r5的另一端与传感器接口jp1的3脚相连;
39.所述转换器u2的9脚并接电容c9的一端后与传感器接口jp1的2脚相连;
40.所述转换器u2的10脚并接电容c9的另一端后与电阻r6的一端相连,所述电阻r6的另一端与传感器接口jp1的1脚相连;
41.所述转换器u2的11脚与控制芯片u1的15脚相连;
42.所述转换器u2的12脚与控制芯片u1的14脚相连;
43.所述转换器u2的14脚并接转换器u2的15脚、电容c12的一端后接地;
44.所述转换器u2的16脚与电容c12的另一端相连。
45.所述电源模块内部使用的芯片为稳压器u3,所述电源模块内部的电路结构为:
46.所述稳压器u3的3脚并接电容c14的一端、电容c15的一端后与5v电源输入端相连;
47.所述稳压器u3的4脚并接稳压器u3的2脚、电容c16的一端、电容c17的一端后与3.3v电源输出端相连;
48.所述稳压器u3的1脚并接电容c14的另一端、电容c15的另一端、电容c16的另一端、电容c17的另一端后接地。
49.一种基于拉力压力关系模型的骨间压力测量方法,包括如下测量步骤:
50.步骤一:初始化静态应变测试装置,根据间隙器上设置的拉力传感器与压力传感器采集数据建立压力与拉力线性关系的模型,并将关系模型预输入中央控制器;
51.步骤1.1:建立压力与拉力线性关系的模型,基于拉力峰值f
max
与骨间隙接触面内的正压力f
n
成正比,即满足:
52.f
max
=μf
n
;
53.式中μ为摩擦因数,基于上式能够通过实时测量到的拉力峰值反推出当前实时的压力数值;
54.步骤1.2:使用拉力传感器和压力传感器采集不同时间内一定数量的测量数据,在测量过程中,通过检测匀速拉动拉力传感器而产生的最大静摩擦力信号,来将其转换成相应的骨间压力信号;
55.步骤1.3:将实验得到的测量数据建立线性关系模型,以骨间压力为自变量x与拉力峰值为因变量y的函数进行拟合,得到下式:
56.y=0.222x+0.186;
57.将拉力峰值与压力的线性关系模型建立为:
[0058][0059]
并将上述得到的线性关系模型预输入进行数据处理的中央控制器中;
[0060]
步骤二:通过拉力传感器来间接测量骨间压力大小;
[0061]
对待测骨间压力的骨骼安装传感器,具体将间隙器的两端分别与拉力传感器固定、与骨间隙接触,在检测骨间压力时,通过匀速拉动拉力传感器来联动间隙器,直至间隙器滑动,此时通过ad转换模块实时采集到拉力传感器的拉力信号,通过对多个采集到的拉力数据进行比对,最终获取到的最大拉力值即为最大静摩擦力值,即拉力峰值f
max
;
[0062]
步骤三:将上述实验数据输入中央控制器,通过系统预输入的拉力压力关系模型和ad值与力的换算关系,将采集到的拉力峰值f
max
换算成骨间压力值;
[0063]
然后通过将当前测量到的骨间压力值与系统预设的最大量程进行对比,判断是否超出预设量程范围,再将测量信号发送至显示屏进行显示。
[0064]
本发明相对于现有技术具备的有益效果为:本发明提出一种基于获取拉
‑
压力数据关系从而间接测量骨间压力大小的方法,该方法通过安装相应的检测装置进行测试实现,通过实验结果表明该装置能实时量化骨间压力的大小,检测具有实时性,该检测装置能
实时精确的量化骨间压力大小,使得医生在手术中消除了由于骨间隙尺寸大小等顾虑,可以更快速地测量骨间压力大小,该骨压检测装置及方法的改进能够有效提高骨骼手术的成功率,从而提高了人体手术后骨骼愈合的速度。
附图说明
[0065]
下面结合附图对本发明做进一步说明:
[0066]
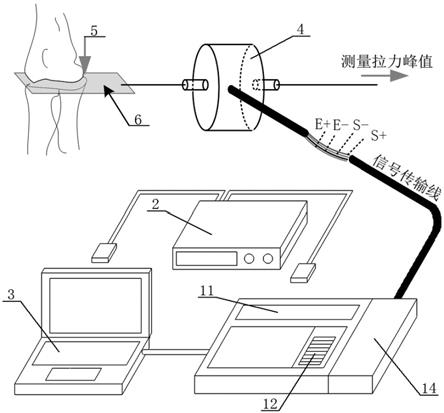
图1为本发明测量系统的结构示意图;
[0067]
图2为本发明测量系统的电路结构示意图;
[0068]
图3为本发明中央控制器的电路图;
[0069]
图4为本发明ad转换模块的电路图;
[0070]
图5为本发明电源模块的电路图;
[0071]
图6为本发明实验建立的拉力峰值与压力关系曲线图;
[0072]
图7为本发明测量方法的步骤流程图;
[0073]
图中:1为静态应变测试装置、11为显示屏、12为状态指示灯、13为中央控制器、14为ad转换模块、15为数据存储模块、16为数据通信模块、17为电源模块、2为电源箱、3为测量计算机、4为拉力传感器、5为压力传感器、6为间隙器。
具体实施方式
[0074]
如图1至图5所示,本发明一种基于拉力与压力关系模型的骨间压力测量系统,包括静态应变测试装置1,所述静态应变测试装置1包括壳体,所述壳体的正面设置有显示屏11和状态指示灯12,所述壳体的内部封装有中央控制器13和ad转换模块14,所述ad转换模块14的信号输出端通过导线与中央控制器13相连;
[0075]
所述中央控制器13还通过导线分别与显示屏11、状态指示灯12、数据存储模块15、数据通信模块16相连;
[0076]
所述中央控制器13的电源输入端还与电源模块17相连,所述电源模块17的输入端通过电源线与电源箱2相连;
[0077]
所述数据通信模块16还通过通信导线与测量计算机3相连;
[0078]
所述ad转换模块14的信号输入端通过导线分别与拉力传感器4、压力传感器5的信号输出端相连;
[0079]
所述拉力传感器4与压力传感器5具体安装在待测骨间压力的骨骼一侧,并在形成骨间压力的骨骼间隙中设置有间隙器6;
[0080]
所述间隙器6具体为平面器件,在间隙器6与骨骼间隙接触的一端设置有压力传感器5,用于实时获取骨间压力信号,在间隙器6的另一端设置有拉力传感器4,用于实时获取对间隙器6的拉力信号。
[0081]
所述中央控制器13内部使用的芯片为控制芯片u1,所述中央控制器13内部的电路结构为:
[0082]
所述控制芯片u1的1脚接3.3v电源;
[0083]
所述控制芯片u1的5脚并接晶振y1的一端、电阻r1的一端后与电容c5的一端相连;
[0084]
所述控制芯片u1的6脚并接晶振y1的另一端、电阻r1的另一端后与电容c6的一端
相连,所述电容c5的另一端并接电容c6的另一端后接地;
[0085]
所述控制芯片u1的7脚并接电阻r2的一端后与电容c7的一端相连,所述电阻r2的另一端接3.3v电源,所述电容c7的另一端接地;
[0086]
所述控制芯片u1的12脚、13脚分别与串口端口p2相连;
[0087]
所述控制芯片u1的14脚、15脚分别与ad转换模块14连接;
[0088]
所述控制芯片u1的20脚与电阻r4的一端相连;
[0089]
所述控制芯片u1的21脚、22脚分别与显示屏11的信号输入端相连;
[0090]
所述控制芯片u1的23脚并接电容c1的一端后接地;
[0091]
所述控制芯片u1的24脚与电容c1的另一端相连;
[0092]
所述控制芯片u1的25脚与状态指示灯12的控制端相连;
[0093]
所述控制芯片u1的34脚、37脚分别与数据下载端口p1相连;
[0094]
所述控制芯片u1的35脚并接电容c2的一端后接地;
[0095]
所述控制芯片u1的36脚与电容c2的另一端相连;
[0096]
所述控制芯片u1的44脚与电阻r3的一端相连,所述电阻r3的另一端并接电阻r4的另一端后接地;
[0097]
所述控制芯片u1的47脚并接电容c3的一端后接地;
[0098]
所述控制芯片u1的48脚与电容c3的另一端相连。
[0099]
所述ad转换模块14内部使用的芯片为转换器u2,所述ad转换模块2内部的电路结构为:
[0100]
所述转换器u2的1脚通过导线分别与三极管q1的发射极、转换器u2的16脚相连;
[0101]
所述转换器u2的2脚与三极管q1的基极相连;
[0102]
所述转换器u2的3脚并接三极管q1的集电极、电容c10的一端后与电阻r7的一端相连;
[0103]
所述转换器u2的4脚并接电阻r7的另一端后与电阻r8的一端相连;
[0104]
所述转换器u2的5脚并接电阻r8的另一端、电容c10的另一端后与电容c11的一端相连;
[0105]
所述转换器u2的6脚与电容c11的另一端相连;
[0106]
所述转换器u2的7脚并接电容c8的一端后与传感器接口jp1的4脚相连;
[0107]
所述转换器u2的8脚并接电容c8的另一端后与电阻r5的一端相连,所述电阻r5的另一端与传感器接口jp1的3脚相连;
[0108]
所述转换器u2的9脚并接电容c9的一端后与传感器接口jp1的2脚相连;
[0109]
所述转换器u2的10脚并接电容c9的另一端后与电阻r6的一端相连,所述电阻r6的另一端与传感器接口jp1的1脚相连;
[0110]
所述转换器u2的11脚与控制芯片u1的15脚相连;
[0111]
所述转换器u2的12脚与控制芯片u1的14脚相连;
[0112]
所述转换器u2的14脚并接转换器u2的15脚、电容c12的一端后接地;
[0113]
所述转换器u2的16脚与电容c12的另一端相连。
[0114]
所述电源模块17内部使用的芯片为稳压器u3,所述电源模块3内部的电路结构为:
[0115]
所述稳压器u3的3脚并接电容c14的一端、电容c15的一端后与5v电源输入端相连;
[0116]
所述稳压器u3的4脚并接稳压器u3的2脚、电容c16的一端、电容c17的一端后与3.3v电源输出端相连;
[0117]
所述稳压器u3的1脚并接电容c14的另一端、电容c15的另一端、电容c16的另一端、电容c17的另一端后接地。
[0118]
本发明提供一种基于拉力与压力关系模型的骨间压力测量系统及方法,该发明提出的方案具体通过测量拉力来将其转换成压力,根据拉力峰值与压力具有明显的关系特征,在测量装置使用过程中,只要在遇到不同间隙大小时直接更换间隙器即可,另外可以使得目前测量方法中受限于骨骼间隙大小而无法测量的问题得以解决;本发明使用的拉力传感器结构基于电桥式的构造,使得测量的精确度高,并能使信号a/d转换和处理得当,使得骨间压力得以精准和实时量化的测量,本发明实现的实时性测量效果为目前医疗技术领域方面对于骨间压力的测量提供了重要保障。
[0119]
进一步的,针对现有测量骨压参数的技术中存在低精准性、量化不稳定性和限于骨间隙尺寸的缺陷,本发明提出一种间接测量骨间隙压力大小的方法,该方法具体将间隙器一端与拉力传感器固定,将间隙器另一端与骨间隙接触,通过匀速拉动拉力传感器来联动间隙器以捕捉间隙器滑动瞬间骨间的拉力值,即为最大静摩擦力值,或称拉力峰值,采集后通过相应的数据处理器再将其换算成骨间压力值,最后通过显示屏显示检测到的压力值,从而达到符合测量骨间隙压力大小的目的。
[0120]
目前应用于骨间隙压力检测的传感器大多是采用直接或间接进行数据采集的压力传感器,而本发明采用符合基本要求的fsr系列的薄膜压力传感器,对其进行相关测试实验,发现该类型传感器直接测量时只能定性分析信号,不能实现精准量化的测量目的,进行间接测量时在骨间隙中设置的新型传感器搭建或者组装结构较为复杂,安装费时费力,安装后使用存在不确定因素,将影响骨间压力测量精度和稳定度。
[0121]
由物理实验可知,在符合实验条件的情况下,当拉力达到一定值时,物体由相对静止到相对滑动的过程中,其拉力与压力存在一定的线性关系,即存在最大静摩擦力(拉力峰值)大小f
max
与两物体接触面之间的正压力f
n
成正比,即:
[0122]
f
max
=μf
n
;
[0123]
则在基于上述理论计算公式的前提下,可以通过拉力峰值(最大静摩擦力)反推出当前具体的压力数值,经过一定数量的间接测量实验,本发明选择具有精度较高、能定量测量等优点的拉力传感器sbt系列,使用时通过检测匀速拉动拉力传感器而产生的最大静摩擦力信号,来将其转换成压力信号;经过大量实验得出的数据可以表明,拉力峰值与压力之间确实存在某种可以被建立的线性关系,因此本发明选择将拉力峰值转换成压力数值的方法来实现对骨间压力间接的测量。
[0124]
本发明的测量原理在于利用拉力峰值转换成压力的方法来实现对骨间压力的测量和量化,为建立拉力峰值与压力的关系模型,本发明搭建有相应的实验平台作为测量系统,如图1所示,主要包括拉力传感器sbt650、微型压力传感器sbt760f、oxford partial knee模型(一种为测量腿部骨骼在膝盖处形成的压力而提供的腿部模型)、静态应变测试仪dh3818y、间隙器和电源箱;其中微型压力传感器在安装时,将其固定于间隙器一端上,放置于oxford partial knee模型骨间来获取骨间压力信号,所述拉力传感器固定于间隙器的另一端,用于获取实时的拉力信号,将拉力传感器、压力传感器通过数据通信导线与静态应
变测试仪连接,由测试仪实时采集它们发送的数据信息,并通过外接电脑工作站对采集信息做进一步处理,由相应控制软件处理后生成实时的波形信号,系统中设置有专用的电源箱,是用来提供给传感器的激励电压5v。
[0125]
在实验过程中,为客观地得到拉力峰值与模型骨间压力之间的关系模型,本发明在0
‑
3kg(g取10kg/n)之间进行了三组拉力峰值与骨间压力随机对应实验,为了清晰地看出实验数据的相关性,本发明借助数学分析软件对实时采集与处理得到的数据进行统计和分析,得到的拉力峰值与骨间压力关系如图6所示,从图中容易看出拉力峰值与骨间压力之间存在明显的函数关系,该对应实验结果表明了本发明通过建立拉力峰值与骨间压力的关系模型来间接测量骨间压力大小的方法具备可行性。
[0126]
在建立拉力峰值与骨间压力间的关系模型时,依据实验结果,在误差允许的范围内,可以借助matlab软件对三组实验进行数据拟合和回归分析,得到以骨间压力为自变量(x)与拉力峰值为因变量(y)的拟合函数关系式如下:
[0127]
y=0.222x+0.186;
[0128]
因此拉力峰值与压力的关系模型可以建立为:
[0129][0130]
基于上述得到的关系模型可以对检测系统进行相应设计,本发明检测系统主要由硬件设备内部结构和软件数据处理方法两部分组成;本发明硬件端主要由mcu最小系统、电源电路、信号采集及放大电路、指示灯电路、显示屏电路组成,如图2所示。
[0131]
如图3所示,本发明提供的检测系统mcu最小系统控制器,其内部的主控芯片采用型号为stm32f103c8t6,主要功能为读取处理好的骨间压力信号,通过iic的通信方式传输到外围oled显示屏上;所述电源电路给整个硬件电路系统提供5v和3.3v的工作电压;由于主控芯片自带的adc转换精度只能达到12位,为达到更高数据处理精度要求,本发明另外在控制器外围设置ad转换控制模块,如图4所示,该模块内部采用hx711芯片,芯片内部的adc转换精度可以达到24位,而且其本身还具备信号放大功能,同时满足了转换精度和信号放大的需求,该控制模块的数据输入输出端口均通过通信端口外接数据通信导线,与拉力传感器、中央控制器进行连接。
[0132]
所述显示屏在使用时可以显示系统电源指示和拉力超量程数据,并显示骨骼模型的骨间压力大小数据,中央控制器外围电路上还设置有下载程序口,其作用是用于软件程序的烧录,另外设置的串口主要作用是连接电脑工作站对程序进行调试。
[0133]
上述硬件设备连接设置完毕后,开始对骨间压力进行测量,首先匀速拉动拉力传感器,此时hx711模块电路实时对采集信号进行a/d转换,并放大拉力信号,然后信号传输到mcu最小系统进行数据处理,具体将收到的ad值
‑
力进行换算、拉
‑
压力数据转换处理,最后将处理后的数据传输到oled显示屏进行显示。
[0134]
本发明软件设计部分主要包括拉力峰值(最大静摩擦力)信号采集及a/d转换、数据换算、压力值显示;该部分通过keil uvision5软件开发平台,采用c语言进行编程,用于实现信号的采集、处理、传输和显示,该系统的程序控制步骤流程如图7所示;
[0135]
将各硬件模块设备进行连接后,本发明涉及检测系统测量骨间压力的方法为:通过拉力传感器来间接测量骨间压力大小,具体将间隙器的两端分别与拉力传感器固定和骨
间隙接触,在需要检测骨间压力时,首先通过匀速拉动拉力传感器来联动间隙器,直至间隙器滑动;然后通过hx711ad转换模块实时采集拉力传感器的拉力信号,通过对多个采集到的拉力数据进行比对,获取到的最大值即为最大静摩擦力,或称拉力峰值;最后将上述实验数据输入中央控制器,通过系统预设的拉
‑
压力关系模型和ad值
‑
力的换算关系式,将拉力值换算成骨间压力值,最后通过对骨间压力值的判断是否超出预设量程范围,再将相应信号发送至屏幕进行显示。
[0136]
为了验证拉
‑
压力关系模型以及检测系统的实效性,本文在已知骨骼模型骨间压力0
‑
30n之间进行了随机实验,我们将实验得到的数据与理论对应的骨间压力值进行了对比,并计算出两者之间的相对误差,压力数据对比结果见下表。
[0137][0138]
从上述压力值对比实验表中可知,骨间压力测量值与理论值之间的误差绝对值最高为3.21%,在检测精度误差允许的范围内;因此,本发明采用的通过拉力峰值转换成压力方法具有实效性。
[0139]
关于本发明具体结构需要说明的是,本发明采用的各部件模块相互之间的连接关系是确定的、可实现的,除实施例中特殊说明的以外,其特定的连接关系可以带来相应的技术效果,并基于不依赖相应软件程序执行的前提下,解决本发明提出的技术问题,本发明中出现的部件、模块、具体元器件的型号、连接方式除具体说明的以外,均属于本领域技术人员在申请日前可以获取到的已公开专利、已公开的期刊论文、或公知常识等现有技术,无需赘述,使得本案提供的技术方案是清楚、完整、可实现的,并能根据该技术手段重现或获得相应的实体产品。
[0140]
最后应说明的是:以上各实施例仅用以说明本发明的技术方案,而非对其限制;尽管参照前述各实施例对本发明进行了详细的说明,本领域的普通技术人员应当理解:其依然可以对前述各实施例所记载的技术方案进行修改,或者对其中部分或者全部技术特征进行等同替换;而这些修改或者替换,并不使相应技术方案的本质脱离本发明各实施例技术方案的范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1