用于产生控制信号的方法与流程
1.本发明涉及一种用于关于控制医疗对象的运动产生控制信号的计算机实现的方法。本发明还涉及一种控制设备、一种探测设备、一种显示设备、一种计算机程序产品和一种计算机可读的存储介质。
背景技术:
2.现今,借助导管进行介入医学干预属于医学中的标准方法。在借助导管的医学介入或导管介入的情况下,导管通常在患者的血管系统中引导。尤其,导管能够在器官的血管系统中引导。血管系统能够由于患者的运动和/或由于患者的呼吸运动和/或由于患者的心脏运动等变形。通常,尤其在周期性运动,例如呼吸和/或心跳的情况下,导管进给在特定的运动状态下是有利的。例如,在特定的运动状态下,导管能够更简单地引导或推动到血管系统的期望的分支中。导管的引导或运动通常由医学专业人员或者由机器人执行。
3.这种干预例如是动脉化疗栓塞(tace)、内镜逆行胰胆管造影(ercp)或在具有细分支的、复杂的血管系统的可变形的器官中的导管导航。此外,这种干预也能够是结肠镜检查或插管术。
4.现今,由经验丰富的医学专业人员执行复杂的导管干预,其中导管通过分支的、运动的血管系统引导。这种医学专业人员很稀少,因此对于复杂的导管干预,患者常常必须经受长的等待时间,或者尽管必需也无法执行复杂的干预。
技术实现要素:
5.因此,本发明的目的是,提供一种方法,所述方法能够实现根据检查对象的运动状态来输出控制信号。
6.所述目的通过一种用于关于控制医疗对象的运动产生控制信号的方法、通过一种用于关于控制医疗对象的运动产生控制信号的设备、通过一种计算机程序产品以及通过一种计算机可读的存储介质来实现。有利的改进方案在以下的说明书中详述。
7.下面关于要求保护的设备和要求保护的方法来描述所述目的的根据本发明的解决方案。在此提及的特征、优点或替选的实施方式同样也能够转用于其它要求保护的主题,并且反之亦然。换言之,实体实施例(所述实施例例如针对设备)也能够借助结合方法描述的或要求保护的特征来改进。所述方法的对应的功能特征在此通过对应的实体模块构成。
8.本发明涉及一种用于关于控制医疗对象的运动产生控制信号的计算机实现的方法,其中产生控制信号与检查对象的当前的运动状态相关。所述方法在此具有通过处理器接收检查对象的至少一部分的运动模型的方法步骤,其中运动模型包括至少一个期望运动状态。另一方法步骤是借助传感器检测所述检查对象的当前的运动状态。另一方法步骤是通过处理器进行比较:当前的运动状态是否至少近似对应于期望运动状态。在另一方法步骤中,所述方法包括:根据比较,通过处理器根据运动模型和当前的运动状态来确定所述控制信号。另一方法步骤是提供所述控制信号。
9.尤其,所述医疗对象例如能够构成为外科器械和/或诊断仪器。尤其,所述医疗对象能够是细长的和/或可弯曲的。所述医疗对象例如能够构成为导管和/或内窥镜和/或导丝。
10.尤其,所述医疗对象的运动能够包括医疗对象的旋转和/或前向运动和/或向后运动和/或弯曲。尤其,所述控制信号能够描述所述医疗对象应执行的运动。尤其,所述运动能够包括从当前位置到目标位置的运动。
11.尤其,所述检查对象能够是人或动物。替选地,所述检查对象能够是假人。尤其,假人能够模拟人的运动。尤其,假人能够模拟在人的血管系统中的运动。所述血管系统包括血管部段或部段和血管分支或分支。所述血管系统尤其能够用气体、液体(例如血液、胆汁、水、尿)和/或肠内容物完全地或部分地填充。所述血管系统尤其能够被器官包围。所述器官例如能够是检查对象的肝脏或胰腺或心脏或大脑等。尤其,所述血管系统能够具有分支,所述分支随着检查对象的运动和/或位置或定位或支承而变形。尤其,所述检查对象的运动例如能够是呼吸运动和/或心脏运动和/或消化系统的运动。尤其,所述血管系统的变形能够由周围的/包围的器官伴随/引起/预设/影响。
12.所述检查对象的当前的运动状态是所述检查对象在当前的时间点所处于的运动状态。当前的运动状态能够与检查对象的位置或支承相关。替选地或附加地,当前的运动状态例如能够与所述检查对象在当前的时间点的呼吸周期和/或心博周期相关。
13.所述运动模型包括检查对象的至少一个可行的运动状态。尤其,所述运动模型包括描述至少一个运动状态的变量。尤其,所述变量能够是医学图像、电信号、光学图像等。尤其,所述运动状态例如能够通过医学图像和/或通过心电图信号和/或通过图像记录和/或通过运动传感器的信号来描述。
14.尤其,所述运动模型有利地包括所述检查对象的如下运动状态,在所述运动状态中,医疗对象的运动能够最好地执行。尤其,这种运动状态被称为期望运动状态。尤其,对于血管系统中的不同位置的期望运动状态可以是不同的。尤其,于是所述运动模型至少对于血管系统中的对应的位置包括对应的期望运动状态。尤其,所述运动模型能够包括检查对象的多个可能的运动状态。在此,所述运动状态中的至少一个运动状态是期望运动状态。尤其,所述期望运动状态也能够是运动状态的时间序列(zeitliche abfolge)。
15.尤其,从所述运动模型中已知,在检查对象的至少一部分内的血管系统的血管分支和/或血管部段对于不同的运动状态如何成形。尤其,根据所述运动模型,对于期望运动状态已知所述检查对象的至少一部分的血管系统的形状。尤其,能够基于所述运动模型来确定所述期望运动状态。
16.借助于所述传感器,检测所述检查对象的当前的运动状态。尤其,这在检测所述检查对象的当前的运动状态的方法步骤中执行。尤其,所述传感器能够构成为图像传感器和/或运动传感器和/或电传感器等。尤其,能够借助于所述传感器连续地检测所述检查对象的当前的运动状态。替选地,所述传感器能够检测假人的模拟的运动状态。
17.尤其,在任意时间点,能够使通过所述传感器检测的当前的运动状态与期望运动状态相协调。尤其,这在比较当前的运动状态是否至少近似对应于期望运动状态的方法步骤中执行。至少近似表示:当前的运动状态和期望运动状态相符或当前的运动状态和期望运动状态在具有最大偏差的情况下相等。在此能够预先确定所述最大偏差。尤其,协调能够
与传感器相关地借助于图像配准和/或模板匹配和/或评估传感器的信号值等进行。尤其,所述传感器检测传感器信号。尤其,协调能够基于比较传感器信号执行。所述比较传感器信号能够在期望运动状态期间检测。替选地,能够对于期望运动状态确定或内插比较传感器信号。尤其,所述比较传感器信号与所述传感器信号等价。尤其,能够将所述比较传感器信号与所述传感器信号进行比较或相协调。尤其,如果当前的运动状态对应于期望运动状态,那么能够通过协调来识别。
18.在比较当前的运动状态是否至少近似对应于期望运动状态的方法步骤中,例如能够借助触发器用信号通知:应执行下一方法步骤。尤其,如果所述比较为肯定,即如果当前的运动状态至少近似对应于期望运动状态,能够激活所述触发器。触发信号尤其能够是开始下一方法步骤的数据信号。
19.如果当前的运动状态基于比较至少近似对应于期望运动状态,则能够在确定所述控制信号的方法步骤中基于运动模型确定所述控制信号。尤其,所述控制信号指明:如果所述检查对象的当前的运动状态对应于所述期望运动状态,应如何以及沿何种方向移动所述医疗对象。尤其,所述控制信号指明:必须如何以及沿何种方向移动所述医疗对象,借此所述医疗对象能够通过血管系统引导或运动至目标位置。替选地或附加地,所述控制信号能够是用于执行医疗对象的运动的触发信号。尤其,所述触发信号能够是光学的、声学的、电的和/或数字的。尤其,所述触发信号能够开始医疗对象的运动。尤其,所述控制信号能够指明:何时应执行医疗对象的运动。尤其,能够对于运动模型中的期望运动状态确定所述控制信号。尤其,能够对于运动模型中的多个运动状态确定所述控制信号。尤其,能够对于运动模型中的每个运动状态确定所述控制信号。在这种情况下,在确定所述控制信号的方法步骤中,“找出”对于期望运动状态描述医疗对象的运动的控制信号。
20.在提供所述控制信号的方法步骤中,提供对于医疗对象的运动的控制信号。
21.发明人已经认识到,根据检查对象的当前的运动状态提供控制信号也对于没有经验的医学专业人员和/或机器人能够实现控制医疗对象在血管系统中的运动。
22.此外,发明人已经认识到,基于所述运动模型能够定义状态,其中能够最简单地和/或以最大程度保护组织的方式将医疗对象引导到血管系统的期望的分支中。尤其,发明人已经认识到,借助于控制信号能够显示所述期望状态。
23.此外,发明人已经认识到,所述控制信号对于医学专业人员能够用作为辅助。发明人已经认识到,尤其如果所述检查对象始终仅在非常短的时间内,例如几分之一秒内具有期望运动状态,则所述控制信号能够支持和/或确保医疗对象的在时间上精确配合的运动。
24.根据本发明的另一方面,对接收运动模型的方法步骤替选地,所述方法还包括通过处理器接收第一医学图像数据集的方法步骤,其中所述第一医学图像数据集至少是检查对象的一部分。然后,所述方法还包括借助处理器确定检查对象的至少一部分的运动模型的方法步骤,其中基于第一医学图像数据集来确定所述运动模型。
25.尤其,对接收所述运动模型的方法步骤替选地,执行接收所述第一医学图像数据集和确定所述运动模型这两个方法步骤。
26.所述第一医学图像数据集能够借助于医学成像装置来检测并且通过所述处理器来接收。所述第一医学图像数据集尤其能够是四维计算机断层扫描(ct)图像数据集。所述四维ct图像数据集包括在不同的时间点记录的多个医学图像。尤其,所述四维ct图像数据
集能够包括在完整的呼吸周期中和/或在完整的心搏周期中的检查对象的至少一部分的记录。替选地,所述第一医学图像数据集能够是单个ct数据集和/或dyna
‑
ct数据集和/或磁共振断层扫描数据集和/或三维超声数据集和/或二维与三维数据集的链接。换言之,所述第一医学图像数据集能够包括单个医学图像。尤其,包括在第一医学图像数据集中的每个医学图像能够示出检查对象的运动状态。
27.尤其,在第一医学图像数据集中示出所述检查对象的至少一部分。尤其,所述检查对象的一部分至少包括血管系统。尤其,在所述第一医学图像数据集中至少能够示出下述器官,所述医疗对象应借助于所述控制信号在所述器官的血管系统中运动。
28.在确定用于检查对象的至少一部分的运动模型的方法步骤中确定所述运动模型。所述运动模型基于第一医学图像数据集来确定。所述运动模型包括检查对象的至少一个可行的运动状态。尤其,所述运动模型至少包括所述检查对象的在第一医学图像数据集中示出的运动状态。尤其,所述运动模型能够包括呈医学图像形式或呈建模的医学图像形式的至少一个运动状态。这种图像的建模在下文中详述。
29.如果在下文中使用表达“所述运动模型包括所述运动状态”,这表示:所述运动模型包括至少近似示出运动状态的医学图像或至少近似示出运动状态的建模的医学图像或可能建模的运动状态的抽象视图。所述抽象视图例如能够仅包括血管系统的中心线的视图。所述中心线能够描述血管系统的伸展。替选的抽象方式是可行的。
30.尤其,所述运动模型至少包括在所述第一医学图像数据集中检测的一个或多个运动状态。
31.尤其,所述运动模型能够包括基于所述第一医学图像数据集借助于生物力学建模来确定的运动状态。换言之,所述运动模型能够借助于生物力学建模来确定。对于生物力学建模,所述检查对象的至少一部分的材料特性是已知的和/或从典型值中推导出。这种材料特性例如能够是刚度、表面结构、可变形性等。借助于所述材料特性,能够对检查对象的至少一部分的运动进行建模。尤其,基于包括在第一医学图像数据集中的至少一个医学图像,针对不同的位置或支承和/或呼吸周期和/或心搏周期,能够对检查对象的至少一部分的运动进行建模。如果所述第一医学图像数据集包括医学图像的时间顺序,则能够借助于生物力学建模对各个医学图像之间的运动状态进行建模。换言之,能够在第一医学图像数据集的医学图像之间内插检查对象的至少一部分的运动。尤其,如果第一医学图像数据集不包括检查对象的期望运动状态,则能够对检查对象的期望运动状态这样进行建模。
32.尤其,因此从运动模型中已知,在检查对象的至少一部分内的血管系统的血管分支和/或血管部段如何对于不同的运动状态成形。尤其,根据运动模型,对于期望运动状态已知检查对象的至少一部分的血管系统的形状。尤其,能够基于运动模型来确定期望运动状态。
33.发明人已经认识到,基于医学图像数据集能够确定运动模型。此外,发明人已经认识到,借助于生物力学建模能够确定运动模型中的运动状态。此外,发明人已经认识到,能够基于运动模型来确定期望运动状态。
34.根据本发明的另一方面,至少所述运动模型的一个期望运动状态与比较传感器信号链接。
35.尤其,所述运动模型能够包括多于一个运动状态。尤其,于是所述运动模型的运动
状态中的每个都能够与比较传感器信号链接。尤其,于是所述运动状态对应于比较传感器信号。
36.尤其,用于确定所述比较传感器信号的传感器能够是运动传感器、电传感器、光学传感器等。尤其,所述比较传感器信号能够是呼吸状态、心电图(ekg)的信号、支承状态或定位状态和/或检查对象的另一图像数据集。尤其,能够在检测到所述运动模型的对应的运动状态的同一时间点检测到所述比较传感器信号。尤其,这样能够将在所述第一医学图像数据集中示出的对应的运动状态与由所述传感器检测的变量链接或关联。
37.尤其,所述第一医学图像数据集能够与比较传感器信号链接。尤其,能够在记录所述第一医学图像数据集期间检测所述比较传感器信号,并且将其与所述第一医学图像数据集在时间上链接。尤其,能够将所述医学图像数据集的多个运动状态与比较传感器信号链接。尤其,能够将所述医学图像数据集的每个运动状态与比较传感器信号链接。尤其,同样能够类似于所述运动状态在用于确定运动模型的生物力学建模期间对所述比较传感器信号进行建模。尤其,所述比较传感器信号能够包括在运动模型中。所述比较传感器信号例如能够是ekg信号和/或与呼吸周期相关的信号和/或来自光学图像数据集的信号。
38.替选地,能够从所述运动模型的运动状态中推导出所述比较传感器信号。
39.尤其,所述比较传感器信号能够是第一医学图像数据集和/或建模的运动状态。
40.尤其,所述比较传感器信号能够与构成用于检测当前的运动状态的传感器的信号等效。尤其,这两个传感器信号能够是类似的。
41.发明人已经认识到,如果将所述期望运动状态与比较传感器信号链接,并且借助等效传感器来检测当前的运动状态,则简化当前的运动状态与期望运动状态的比较。以这种方式简单可行的是,例如将当前的呼吸状态或当前的心脏运动与期望运动状态的呼吸状态或心脏运动相协调。
42.根据本发明的另一方面,所述方法还包括确定运动路径的方法步骤,其中所述运动路径描述医疗对象的运动的空间方向。在此,所述运动路径的确定基于所述运动模型。
43.尤其,在确定所述运动模型之后执行所述运动路径的确定。尤其,在确定所述控制信号之前执行所述运动路径的确定。尤其,能够在检测到当前的运动状态之前执行所述运动路径的确定。替选地,能够在比较所述当前的运动状态是否至少近似对应于所述期望运动状态之前,执行所述运动路径的确定。替选地,能够在比较所述当前的运动状态是否至少近似对应于所述期望运动状态之后,执行所述运动路径的确定。
44.尤其,所述运动路径描述所述医疗对象必须遵循的路径,借此所述医疗对象能够从当前位置引导至目标位置。
45.尤其,所述运动路径描述所述医疗对象应在血管系统中执行的运动的空间方向。尤其,所述运动路径能够根据在血管系统中的位置描述运动的空间方向的顺序。
46.运动的空间方向尤其能够描述所述医疗对象在血管系统中的向前运动或向后运动。所述运动的空间方向尤其能够包括“向前”、“向后”、“向左”、“向右”、“向上”、“向下”和/或在它们之间的方向。此外,所述空间方向能够描述转动。尤其,所述空间方向能够描述:所述转动是否应顺时针或逆时针执行。
47.尤其,能够基于所述运动模型来手动地和/或自动地确定所述运动路径。尤其,能够借助于所述血管系统的分区来进行自动确定。此外,随后能够借助于骨架化算法进行自
动确定。尤其,能够通过解决最小化问题来进行自动确定。尤其,在此能够将沿着骨架化的血管从血管系统中的当前位置到血管系统中的目标位置的路径最小化。替选地,能够借助于机器学习来确定运动路径。
48.尤其,能够至少对于期望运动状态确定所述运动路径。尤其,能够对于包括在运动模型中的多于一个的运动状态来确定所述运动路径。尤其,能够对于包括在所述运动模型中的所有运动状态来确定运动路径。尤其,能够对于由多个期望运动状态构成的组合来确定所述运动路径。
49.尤其,能够通过确定所述运动路径来确定所述运动模型中的期望运动状态。尤其,所述期望运动状态能够对应于运动模型中的如下运动状态,在所述运动状态中例如所述运动路径是最小的,和/或在所述运动状态中所述运动路径伸展穿过的血管部段具有相对最大的直径。替选地或附加地,所述期望运动状态能够对应于运动模型中的运动状态,其中所述运动路径具有最大曲率半径。
50.尤其,所述期望运动状态能够是运动状态的时间顺序,其组合根据上述标准对运动路径进行优化。
51.发明人已经认识到,借助所述运动路径,能够描述所述医疗对象为了到达目标位置应遵循的最佳路径。此外,发明人已经认识到,从运动路径中能够推导出医疗对象的对于遵循路径所需的运动的空间方向。
52.根据本发明的另一方面,对于运动模型中的期望状态确定所述运动路径。
53.在此,如上所述至少对于运动模型中的期望运动状态确定所述运动路径。尤其,对于血管系统中的不同位置,所述期望运动状态能够是不同的。
54.发明人已经认识到,通过对于期望运动状态确定所述运动路径,能够提供医疗对象从当前位置到目标位置的最佳路径。此外,发明人已经认识到,如果仅对于期望运动状态确定所述运动路径,那么能够节省计算时间,并且能够加速所述运动路径的确定。
55.根据本发明的另一方面,尤其通过检测呼吸状态和/或通过检测ekg信号和/或通过检测检查对象的光学跟踪和/或通过检测当前的图像数据集来检测当前的运动状态。
56.尤其,检测当前的运动状态能够包括检测所述检查对象的呼吸状态。为此,能够检测所述检查对象的呼吸运动。尤其,能够借助于光学标记使所述呼吸运动可见并且通过相机检测。尤其,所述光学标记能够设置在检查对象的胸部区域中。尤其,用于检测当前的运动状态的传感器包括相机和光学标记。替选地,能够借助于呼吸系统检测和/或控制呼吸运动。尤其,所述传感器于是包括呼吸系统。
57.尤其,检测当前的运动状态能够包括借助于ekg(心电图)检测流过检查对象的心脏的心脏电流或电势。尤其,基于ekg能够确定检查对象的心脏的当前的运动状态。尤其,所述传感器于是包括ekg设备。
58.尤其,一般能够通过光学跟踪来检测所述检查对象的当前的运动状态。尤其,为此能够在所述检查对象上施加有光学标记,借助相机记录所述光学标记的运动。替选地,能够在没有标记的情况下借助相机记录所述检查对象的运动。尤其,所述传感器于是包括相机和可能的标记。
59.尤其,能够通过检测当前的图像数据集来检测所述检查对象的当前的运动状态。尤其,能够借助ct设备或c臂设备或者借助平板x射线设备或者借助磁共振断层扫描设备或
者借助3d超声设备等来检测当前的图像数据集。尤其,能够借助这些设备的组合来检测当前的图像数据集。尤其,所述设备能够在时间上彼此耦合。尤其,能够将当前的图像数据集与用于检测运动的第一医学图像数据集进行比较。尤其,所述传感器于是包括至少一个图像传感器,用于检测当前的图像数据集。
60.尤其,所述检查对象的当前的运动状态能够通过至少一个运动传感器来确定,所述运动传感器设置在医疗对象上。尤其,所述运动传感器能够是加速度传感器和/或力传感器。尤其,所述运动传感器能够检测由于检查对象的运动造成的在血管系统中的医疗对象的变形。尤其,所述传感器于是包括运动传感器。
61.尤其,在医疗对象上能够设置有传感器,所述传感器检测所述医疗对象的弯曲、形状、空间方位和/或所述医疗对象施加到周围组织上的力。尤其,从这些数据中能够确定所述检查对象的当前的运动状态。
62.尤其,也能够借助于至少一个运动传感器来检测所述检查对象的当前的运动状态,所述运动传感器设置在所述检查对象和/或所述检查对象的至少一个器官上。尤其,所述运动传感器能够构成为加速度传感器。尤其,用于检测当前的运动状态的运动的传感器于是包括至少一个运动传感器。
63.尤其,能够借助上述可行性的组合来检测当前的运动状态。尤其,所述传感器能够包括这种组合。尤其,能够借助于时间跟踪将来自所述组合的不同的信号耦合。
64.尤其,能够从传感器信号中推导出对应于运动模型中的运动状态的格式的当前的运动状态。尤其,推导出的当前的运动状态于是与运动模型中的至少一个运动状态类似。
65.替选地,所述传感器能够检测与比较传感器信号等效的信号。尤其,所述传感器的信号于是能够与比较传感器信号类似。尤其,用于检测比较传感器信号的传感器能够构成为与用于检测当前的运动状态的传感器信号的传感器等效。换言之,能够将如下传感器用于检测所述比较传感器信号,所述传感器构成为与用于检测当前的运动状态的传感器等效。等效表示:这两个传感器检测类似的信号。
66.发明人已经认识到,能够借助于从多个传感器中进行选择来确定所述检查对象的当前的运动状态。此外,发明人已经认识到,能够从传感器信号中推导出当前的运动状态。此外,发明人已经认识到,能够以这种方式实现当前的运动状态与运动模型的运动状态的比较。
67.根据本发明的另一方面提出,尤其通过从运动模型中求取的对检查对象的支承和/或通过将有针对性的力施加到所述检查对象上和/或借助于显示设备和/或借助于关于呼吸的规定和/或通过呼吸单元来引起期望运动状态。
68.换言之能够提出,如何有针对性地引起检查对象的期望运动状态。尤其,能够借助于显示设备向医学专业人员提出建议。尤其,能够以图像和/或文字和/或声学的方式通知或建议所述医学专业人员:能够如何引起检查对象的期望运动状态。尤其,能够以文字的方式描述:能够如何引起期望运动状态。尤其,能够以象形图的形式示出:能够如何引起期望运动状态。尤其,能够以声学的方式描述:能够如何引起期望运动状态。替选地,所述建议能够是发送给下述单元的数据信号,所述单元作用到检查对象上,使得引起所述期望运动状态。
69.尤其,通过从运动模型中求取的对检查对象的支承能够引起期望运动状态。换言
之,能够从运动模型中求取下述位置,在所述位置中所述检查对象处于期望运动状态下。尤其,医学专业人员能够支承所述检查对象,使得所述检查对象处于从运动模型中求取的位置中。尤其,所述位置或支承例如能够通过检查对象的俯卧姿势和/或通过仰卧姿势和/或通过侧卧姿势来描述。尤其,通过有针对性地支持所述检查对象,血管系统能够通过重力和/或通过检查对象的其它器官对血管系统的压力而成形,使得引起所述期望运动状态。
70.替选地,能够通过由医学专业人员将有针对性的力施加到检查对象上来引起所述期望运动状态。尤其,为此医学专业人员能够按压检查对象的例如为腹部的区域。尤其,以这种方式,所述器官能够变形和/或移位,使得引起所述期望运动状态。
71.替选地,能够借助于在显示设备上的显示来引起所述期望运动状态。尤其,能够为检查对象显示,其应如何定位或运动,借此引起所述期望运动状态。尤其,所述显示能够示出象形图和/或文本,所述象形图和/或文本描述:所述检查对象应如何运动和/或定位,使得其具有其期望运动状态。
72.替选地,能够为检查对象关于呼吸进行规定,借此所述检查对象具有期望运动状态。尤其,能够直接地通过显示设备或声学地或间接地经由医学专业人员对检查对象规定:其应如何呼吸。尤其,这种规定例如能够是“深吸气”或“屏气”或“慢呼气”等。
73.替选地,能够借助于呼吸单元引起所述期望运动状态。尤其,能够将数据信号发送给呼吸单元。尤其,所述检查对象能够借助呼吸单元呼吸。尤其,所述呼吸单元能够控制检查对象的呼吸,使得实现所述期望运动状态。尤其,呼吸设备能够引起非常快速的、平缓的呼吸。尤其,所述呼吸设备能够引起在任意的呼吸状态下屏住呼吸。
74.发明人已经认识到,通过建议:能够如何尽可能有效地引起所述期望运动状态,能够更快地提供所述控制信号。尤其,能够以这种方式使所述医疗对象更快地运动到其目标位置处,因为能够快速地提供所述控制信号。
75.根据本发明的另一方面,所述控制信号描述医疗对象的运动的方向和取向,和/或触发所述医疗对象的运动。
76.尤其,所述控制信号描述:所述医疗对象应如何以及沿何种方向运动。换言之,所述控制信号描述医疗对象的运动。尤其,所述控制信号能够描述医疗对象的运动。替选地,所述控制信号能够描述医疗对象的运动顺序。
77.尤其,所述控制信号能够描述:所述医疗对象应沿何种方向运动或被沿何种方向移动。尤其,所述控制信号能够描述:所述医疗对象的运动是否应向前、向后、向上、向下、向右、向左或者沿位于它们之间的方向进行。
78.尤其,所述控制信号能够描述:如何沿预设的方向进行运动。尤其,所述控制信号例如能够描述简单的线性运动,或者通过围绕医疗对象的轴线的旋转运动,或者通过弯曲所述医疗对象的轴线等来描述。尤其,所述控制信号能够描述所述弯曲的方向和/或半径。
79.替选地或附加地,所述控制信号能够触发所述医疗对象的运动。尤其,所述控制信号能够是光学的和/或声学的和/或电的和/或数字等的触发器,所述触发器开始所述医疗对象的运动。
80.发明人已经认识到,能够通过所述控制信号来描述所述医疗对象的实际运动。所述实际运动是医疗对象为了能够遵循所述运动路径而执行的运动。发明人已经认识到,所述控制信号随后能够用于医疗对象的实际运动。
81.根据本发明的另一可行的方面,所述控制信号描述:所述期望运动状态何时至少近似对应于当前的运动状态。
82.换言之,所述控制信号描述:所述期望运动状态何时推测地达到或具有期望运动状态。
83.尤其,基于描述当前运动状态和之前的当前运动状态的传感器信号能够外推,当前运动状态何时对应于期望运动状态。尤其,为此能够在时间上分析在检测当前的运动状态的步骤中所检测的数据。尤其,基于该分析能够做出预测:当前的运动状态何时对应于所述期望运动状态。尤其,能够从中推导或外推出:何时应执行医疗对象的通过控制信号描述的运动。
84.尤其,这种外推能够对于检查对象的周期性运动执行。尤其,对于周期性的呼吸运动或周期性的心脏运动,能够从之前对当前的运动状态的测量中推断出:当前的运动状态何时对应于期望运动状态。尤其,能够在周期性的运动周期内确定推测地或预测地达到所述期望运动状态的时间点。
85.尤其,也能够对于非周期性的运动进程执行这种外推。尤其,基于当前的运动状态的过去的传感器信号,能够基于模型和/或公式进行外推:何时达到所述期望运动状态。尤其,能够确定达到所述期望运动状态的预测的时间点。
86.尤其,于是能够提早提供所述控制信号。换言之,能够在当前的运动状态对应于期望运动状态之前提供所述控制信号。尤其,能够在到达所述期望运动状态的预测的时间点之前以定义的时间间隔输出所述控制信号。尤其,所述控制信号能够指明:期望运动状态何时出现,进而何时应执行所述医疗对象的运动。
87.发明人已经认识到,有利的是,所述控制信号包括关于所述期望运动状态出现的时间点的信息。因此可行的是,在期望运动状态出现之前就已经提供所述控制信号。这能够实现:所述医学专业人员或机器人能够提早适合于和准备执行医疗对象的运动。
88.根据本发明的另一方面,所述控制信号在显示设备上输出。
89.尤其,能够将所述控制信号提供给所述显示设备。尤其,输出所述控制信号,使得医学专业人员能够根据输出的控制信号移动所述医疗对象。尤其,所述控制信号能够以文本的方式和/或以图像的方式在显示设备上输出。尤其,能够以文本形式输出所述运动的方向和/或类型。例如,能够输出文本“向前,旋转”或“向左,90
°
弯曲”。替选地或附加地,能够以图像形式、尤其以象形图的形式在显示设备上示出所述运动。替选地,所述运动能够与当前的医学图像叠加地示出。尤其,例如能够借助于箭头示出所述医疗对象的运动。尤其,所述控制信号能够用作为对医学专业人员的辅助。
90.尤其能够显示:仍然需要持续多久,直至所述期望运动状态至少近似对应于当前的运动状态。尤其,能够显示倒计时,所述倒计时示出直至执行医疗对象的运动的剩余时间。
91.发明人已经认识到,以这种方式,受过较少培训的专业人员也能够移动或引导医疗对象。此外,发明人已经认识到,能够以这种方式培训医学专业人员,尤其借助假人进行培训。
92.根据本发明的另一可行的方面,所述控制信号作为数据信号转发给机器人。
93.尤其,所述机器人能够构成用于,移动或引导所述医疗对象。尤其,所述控制信号
为所述机器人指明:所述机器人应如何和/或何时移动所述医疗对象。
94.发明人已经认识到,所述控制信号也能够用于操控机器人。
95.根据本发明的另一方面,仅当所述医疗对象距临界部位低于预设的间距时,才提供所述控制信号。在此,所述临界部位从运动模型中推导出。
96.所述临界部位例如是窄的分支或血管部段,这与检查对象的运动状态相关地大幅变化。临界部位的特征能够在于,在不同的运动状态下,所述医疗对象能够以不同的难易程度引导或运动到期望的血管部段中或穿过期望的血管分支。
97.尤其,所述医疗对象能够简单地在临界部位之外运动。尤其,所述医疗对象在临界部位之外的运动比穿过临界部位的运动危险性更低。
98.尤其,能够在运动模型中标记临界部位。尤其,能够手动地或自动地标记所述临界部位。尤其,所述临界部位的标记与血管直径、临界部位与运动状态相关的运动和/或在临界部位的位置处分支的程度有关。尤其,能够预设或预先限定或给出间距,应自该间距起根据所述方法提供所述控制信号。换言之,如果低于该间距,则提供所述控制信号。意即,如果所述医疗对象比该间距所规定的更靠近临界部位,则提供所述控制信号。
99.所述间距能够由医学专业人员预设。尤其,所述间距能够由医学专业人员对于每次干预或根据实施干预的医学专业人员来调整。替选地,能够对于间距固定地预设值。替选地,能够自动地确定所述间距。尤其,能够根据临界部位自动地确定所述间距。尤其,能够根据血管直径、分支的程度和/或临界部位的运动来确定所述间距。所述部位越临界,预设的间距就越大。
100.尤其,如果医疗对象距临界部位具有较大的间距,则所述医疗对象能够在不具有控制信号的情况下自由运动。
101.尤其,能够对血管系统确定多于一个临界部位。尤其,对于临界部位,所述间距可能是不同的。
102.发明人已经认识到,并非在每个部段中或对于每个医学专业人员都需要提供所述控制信号。尤其,发明人已经认识到,如果仅在临界部位处提供所述控制信号,那么能够加速医疗对象至目标位置的运动。
103.根据本发明的另一方面,在循环中执行下述方法步骤:借助传感器检测所述检查对象的当前的运动状态;比较:当前的运动状态是否至少近似对应于期望运动状态;根据比较,借助处理器根据运动模型和当前的运动状态来确定所述控制信号;提供所述控制信号。
104.尤其,所述方法步骤能够在循环中在多个临界部位上执行。尤其,所述循环能够包括至少一次循环遍历(schleifendurchlauf)。尤其,所述循环能够包括多次循环遍历,使得所述医疗对象从其起始位置运动到其目标位置。尤其,能够提供多个控制信号。尤其,能够在多次或每次循环遍历中提供控制信号。尤其,多个控制信号能够构成用于将医疗对象从起始位置移动到目标位置。尤其,能够在多次或每次循环遍历中根据医疗设备在血管系统中的当前位置提供控制信号。
105.发明人已经认识到,有利地执行用于在循环中提供控制信号的方法步骤,借此能够通过控制信号来描述所述医疗对象从起始位置到目标位置的整个运动。
106.本发明还涉及一种用于关于控制医疗对象的运动产生控制信号的控制设备。在此,控制信号的产生与对象的当前的运动状态相关。在此,所述控制设备构成用于执行上述
方法。所述控制设备包括处理器,所述处理器构成为,接收检查对象的至少一部分的运动模型。在此,所述运动模型包括至少一个期望运动状态。所述处理器还构成用于比较:当前的运动状态是否至少近似对应于期望运动状态。所述处理器还构成用于,根据运动模型和当前的运动状态确定控制信号。所述处理器还构成用于,提供所述控制信号。
107.这种控制设备尤其能够构成用于,执行上述的用于产生用于控制医疗对象的运动的控制信号的方法。所述控制设备构成用于执行所述方法,其方式为:所述处理器构成用于,执行对应的方法步骤。
108.本发明还涉及一种用于关于控制医疗对象的运动产生控制信号的控制设备。在此,控制信号的产生与对象的当前的运动状态相关。在此,所述控制设备构成用于执行上述方法。所述控制设备包括处理器,所述处理器构成为,接收第一医学图像数据集。在此,所述第一医学图像数据集为检查对象的至少一部分。所述处理器还构成用于,确定所述检查对象的至少一部分的运动模型。在此,基于第一医学图像数据集来确定所述运动模型。所述处理器还构成用于比较:当前的运动状态是否至少近似对应于期望运动状态。所述处理器还构成用于,根据运动模型和当前的运动状态来确定所述控制信号。所述处理器还构成用于,提供所述控制信号。
109.本发明还涉及一种探测设备,所述探测设备与控制设备连接,用于传输关于当前的运动状态的信息。所述探测设备包括传感器,所述传感器构成用于,检测当前的运动状态。
110.尤其,所述传感器能够包括相机和/或光学标记和/或医学成像系统和/或运动传感器和/或心电图电极等。
111.在该上下文中,连接能够表示:所述探测设备集成到所述控制设备中。尤其,所述探测设备例如能够包括c型臂。然后,所述传感器包括c型臂的成像系统。尤其,c型臂那么能够集成到控制设备中。尤其,所述控制设备和集成到所述控制设备中的探测设备能够交换数据。
112.替选地,所述探测设备能够与控制设备连接,使得这两个设备能够交换数据,其中这两个设备在空间上分开。尤其,所述探测设备能够经由连接将关于检查对象的当前的运动状态的信息传输给所述控制设备。尤其,所述控制设备能够从所述探测设备接收信息或数据。尤其,所述设备能够电连接。尤其,所述设备能够借助于线缆连接。
113.本发明还涉及一种用于输出所述控制信号的显示设备。
114.尤其,所述显示设备构成用于,对于医学专业人员输出所述控制信号。尤其,能够借助于所述显示设备来提供所述控制信号。
115.尤其,所述显示设备能够包括屏幕。尤其,屏幕能够构成用于,显示文本和/或图像。尤其,所述显示设备能够构成用于,以文本或图像形式显示所述控制信号。尤其,所述屏幕能够是管式屏幕或led屏幕或等离子屏幕等。
116.尤其,所述显示设备能够与控制设备连接。尤其,所述显示设备能够与所述控制设备连接成,使得由控制设备提供的控制信号由所述显示设备接收。尤其,所述控制设备和所述显示设备能够电连接。尤其,所述控制设备和所述显示设备能够借助于线缆连接。
117.替选地,所述显示设备能够集成到所述控制设备中。换言之,所述控制设备能够具有显示设备。
118.本发明还涉及一种具有计算机程序的计算机程序产品以及一种计算机可读介质。很大程度上基于软件的实现方案的优点在于,也能够以简单的方式通过软件更新对已经至今使用的控制设备进行改装,以便能够以所描述的方式工作。除了所述计算机程序以外,这种计算机程序产品还可能包括附加的组成部分,例如文档和/或附加的组件,以及硬件组件,例如硬件密钥(加密狗等),以用于使用软件。
119.尤其,本发明还涉及一种具有计算机程序的计算机程序产品,所述计算机程序能够直接加载到控制设备的存储器中,所述计算机程序具有程序段,以便当所述程序段由所述控制设备执行时,能够执行在上文中描述的用于产生用于控制医疗对象的运动的控制信号的方法的所有步骤。
120.尤其,本发明涉及一种计算机可读的存储介质,在其上存储有由确定系统和/或训练系统可读和可执行的程序段,以便当所述程序段由所述控制设备执行时,能够执行在上文中描述的用于产生用于控制医疗对象的运动的控制信号的方法的所有步骤。
附图说明
121.结合以下附图和对其的描述,本发明的上述特性、特征和优点变得更加清楚和更加易于理解。在此,附图和描述不应以任何方式限制本发明及其实施方式。
122.在不同的附图中,相同的组件设有相对应的附图标记。所述附图通常不是符合比例的。
123.附图示出:
124.图1示出用于产生用于控制医疗对象的运动的控制信号的方法的第一实施例的流程图;
125.图2示出用于产生用于控制医疗对象的运动的控制信号的方法的第二实施例的流程图;
126.图3示出用于产生用于控制医疗对象的运动的控制信号的方法的第三实施例的流程图;
127.图4示出用于产生用于控制医疗对象的运动的控制信号的方法的第四实施例的流程图;
128.图5对于具有运动路径的运动状态示出血管系统的示意图;
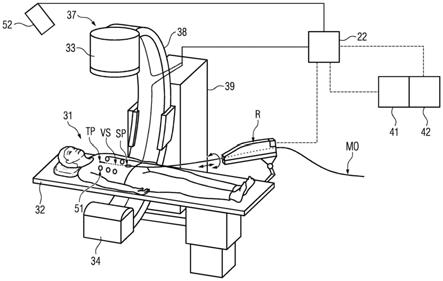
129.图6示出具有探测设备和显示设备的控制设备的示意图;
130.图7示出控制设备。
具体实施方式
131.图1示出用于产生用于控制医疗对象mo的运动的控制信号的方法的第一实施例的流程图。
132.在接收rec
‑
1第一医学图像数据集的方法步骤中,接收至少一个医学图像。尤其,所述第一医学图像数据集能够包括医学图像的时间顺序。尤其,所述第一医学图像数据集能够借助计算机断层扫描设备、c型臂、磁共振断层扫描设备、3d超声等来检测。在第一医学图像数据集中,检测检查对象31的至少一部分的至少一个运动状态ms。尤其,在第一医学图像数据集中能够检测所述检查对象31的一部分的运动状态ms的时间顺序。所述检查对象31
的一部分包括器官,所述医疗对象mo应在所述器官中运动。所述器官包括具有血管部段vsec和血管分支vb的血管系统vs,所述医疗对象mo应沿其运动。
133.所述运动状态ms例如能够与检查对象31的支承或位置和/或心脏运动或心脏状态和/或呼吸运动或呼吸状态和/或消化系统的运动等相关。
134.在确定det
‑
1运动模型的方法步骤中,基于所述第一医学图像数据集来确定所述运动模型。对于检查对象31的至少一部分求取所述运动模型。所述运动模型至少包括在第一医学图像数据集中检测的一个或多个运动状态ms。借助于生物力学建模,在运动模型中对其它运动状态ms进行建模。对于生物力学建模,根据检查对象31的在第一医学图像数据集中检测的部分的已知的材料特性,对运动状态ms进行建模。在此考虑材料特性,如刚性、与周围组织的共同作用等。此外,在对运动状态ms进行生物力学建模时考虑所述检查对象31的支承或位置。尤其,所述运动模型那么包括至少一个期望运动状态。
135.在所述期望运动状态下,能够将所述医疗对象mo沿着期望的运动路径mp尽可能简单地移动或引导至目标位置tp。所述期望运动状态也能够包括运动状态ms的时间顺序。能够手动地确定所述期望运动状态。替选地,能够根据运动模型自动地确定所述期望运动状态。
136.在检测rec
‑
2所述检查对象31的当前的运动状态的方法步骤中,借助传感器检测当前的运动状态。所述当前的运动状态是所述检查对象31的下述运动状态ms,所述检查对象31在当前的时间点具有所述运动状态。所述传感器能够包括多个组件。例如,所述传感器能够包括具有或不具有光学标记51的相机52。所述光学标记51例如能够设置在检查对象31的胸部和/或腹部区域中。所述光学标记51的运动能够借助相机52记录和评估。能够从所述运动中得出关于当前的运动状态的结论。尤其,能够以这种方式检测所述检查对象31的呼吸运动或呼吸状态。替选地,所述相机52能够在没有光学标记51的情况下检测所述检查对象31的运动。借助于图像处理,同样能够从所述记录中得出关于当前的运动状态的结论。替选地或附加地,所述传感器能够包括ekg系统。能够从ekg系统的ekg信号中推导出当前的运动状态,尤其是检查对象31的心脏运动。替选地或附加地,所述传感器例如能够包括呼吸设备。借助于所述呼吸设备能够设定所述检查对象31的呼吸状态,并且能够从中推导出当前的运动状态。替选地或附加地,所述传感器能够包括医学成像系统。所述医学成像系统例如能够是c型臂37或3d超声设备或ct设备或磁共振断层扫描设备或平板x射线设备等。
137.在比较det
‑
2所述检查对象31的当前的运动状态是否至少近似对应于所述期望运动状态的方法步骤中,例如输出触发信号,所述触发信号指明:所述期望运动状态对应于所述当前的运动状态。这开始以下方法步骤。为了比较所述运动状态,能够将在检测rec
‑
2当前的运动状态的方法步骤中检测的传感器信号与比较传感器信号进行比较。在此,至少将运动模型中的期望运动状态与比较传感器信号链接。借助传感器检测所述比较传感器信号,所述传感器与用于检测rec
‑
2当前的运动状态的传感器等效。因此,能够比较两个传感器信号。替选地,能够将运动模型中的多个运动状态与比较传感器信号链接。替选地,能够将运动模型中的每个运动状态与比较传感器信号链接。
138.下一方法步骤能够是确定det
‑
3控制信号。替选地,该方法步骤能够直接在确定det
‑
1运动模型的方法步骤之后执行。基于所述运动模型和当前的运动状态来确定所述控制信号。在此,当前的运动状态至少近似对应于所述期望运动状态。替选地,能够预先对运
动模型中的多个运动状态确定控制信号。在这种情况下,在确定det
‑
3控制信号的方法步骤中,“找出”所述控制信号,所述控制信号属于至少近似对应于当前的运动状态的期望运动状态。所述控制信号描述所述医疗对象mo必须执行的运动,借此所述医疗对象能够在期望运动状态下通过血管系统vs运动或引导至目标位置tp。所述控制信号描述医疗对象mo对于所述运动的空间方向和取向。所述控制信号例如描述医疗对象mo围绕其自身轴线的旋转。替选地或附加地,所述控制信号能够描述所述医疗对象mo围绕轴线的弯曲。在这种情况下,所述控制信号还能够描述所述弯曲的空间方向和半径。此外,所述控制信号能够描述:所述期望运动状态何时至少近似对应于当前的运动状态。为此,所述控制信号能够包括对此的推测的或预测的时间点。该时间点能够通过从检测当前的运动状态的步骤中外推传感器信号的时间顺序来确定。
139.在提供prov
‑
1的方法步骤中,提供用于所述医疗对象mo的运动的控制信号。
140.所述控制信号尤其能够借助于显示设备42来提供。当医学专业人员应移动所述医疗对象mo时,所述显示设备能够以文本或图像形式向医学专业人员显示所述控制信号。
141.替选地,能够将所述控制信号提供给移动所述医疗对象mo的机器人r。
142.在实施例中,仅当所述医疗对象mo距临界部位cp低于预定的间距时,才能够输出所述控制信号。所述临界部位cp能够手动地或自动地定义。所述临界部位cp例如能够是具有高分支程度的部位。替选地或附加地,在所述临界部位cp处,所述血管部段vsec的血管直径能够是相对小的。替选地或附加地,临界部位cp的形状能够与检查对象31的运动状态ms强烈相关。换言之,所述临界部位cp能够随着检查对象31的运动明显地一起运动和/或变形。
143.图2示出用于产生用于控制医疗对象mo的运动的控制信号的方法的第二实施例的流程图。
144.类似于根据图1的描述执行以下方法步骤:接收rec
‑
1第一医学数据集;确定det
‑
1运动模型;检测rec
‑
2当前的运动状态;比较det
‑
2:当前的运动状态是否至少近似对应于期望运动状态;确定det
‑
3所述控制信号;和提供prov
‑
1所述控制信号。
145.在该实施例中,在确定det
‑
1所述运动模型之后,执行基于所述运动模型确定det
‑
4运动路径mp的方法步骤。所述运动路径mp尤其描述医疗对象mo的运动的空间方向。所述运动路径mp描述从血管系统vs中的医疗对象mo的当前位置或起始位置sp到目标位置tp的路径。所述运动路径mp例如能够通过对极小化问题求解来确定。首先,能够在运动模型的运动状态ms中对所述血管系统vs进行分区,并且能够借助于骨架化算法来确定血管系统vs的中心线。为此,所述运动状态ms能够以医学图像的形式存在于运动模型中。替选地,在确定所述运动模型时就已经能够执行分区和应用骨架化算法的步骤。沿着所述中心线能够确定从起始位置sp到目标位置tp的不同的路径。这些路径中的最短路径能够是运动路径mp。替选地,所述运动路径mp能够是穿过具有最大血管直径的血管部段vsec伸展的路径。
146.替选地,能够借助于机器学习来确定所述运动路径mp。
147.替选地,所述运动路径mp能够由医学专业人员手动确定。
148.能够对于运动模型中的所有运动状态ms确定所述运动路径mp。为了节省计算时间,如果期望运动状态是已知的,能够仅对于所述运动模型的期望运动状态确定所述运动路径mp。
149.所述期望运动状态能够例如由医学专业人员手动地规定。替选地,能够基于所述运动路径mp来确定所述期望运动状态。为此,能够对运动模型中的不同的运动状态ms的运动路径mp进行比较。尤其,如下运动状态ms能够规定为期望运动状态,在所述运动状态中,例如医疗对象mo应在其中运动的血管部段vsec的血管直径是最大的。替选地或附加地,如下运动状态ms能够定义为期望运动状态,在所述运动状态中,医疗对象mo应运动穿过的血管分支vb定向为,使得到对应的血管部段vb中的运动应尽可能简单地执行。
150.在替选的实施例中,确定det
‑
4所述运动路径mp的方法步骤能够在确定det
‑
1所述运动模型之后和在确定det
‑
3所述控制信号之前的任意部位执行。
151.图3示出用于产生用于控制医疗对象mo的运动的控制信号的方法的第三实施例的流程图。
152.所示出的实施例的方法步骤如根据图1和2所描述的那样执行。在该实施例中,经由以下方法步骤来执行循环:检测rec
‑
2当前的运动状态;比较det
‑
2:当前的运动状态是否至少近似对应于期望运动状态;确定det
‑
3所述控制信号;和提供det
‑
3所述控制信号。所述循环能够包括至少一次循环遍历。尤其,所述循环能够包括多次循环遍历,使得所述医疗对象mo能够借助于所述控制信号运动至目标位置tp。
153.尤其,能够根据所述医疗对象mo在血管系统vs中的当前位置来提供控制信号。换言之,在循环遍历中提供的控制信号能够是不同的。尤其,能够对于多个临界部位cp执行所述循环。
154.图4示出用于产生用于控制医疗对象mo的运动的控制信号的方法的第四实施例的流程图。
155.类似于根据图1的描述执行以下方法步骤:检测rec
‑
2当前的运动状态;比较det
‑
2:所述当前的运动状态是否至少近似对应于期望运动状态;确定det
‑
3所述控制信号;和提供prov
‑
1所述控制信号。
156.替选于根据图1的接收rec
‑
1第一医学图像数据集和确定det
‑
1运动模型的方法步骤,在该实施例中,在接收rec
‑
3所述运动模型的方法步骤中接收所述运动模型。在此,类似于根据图1的描述构成所述运动模型。
157.也能够类似地对于该实施例执行根据图2和3的实施例。
158.图5示出对于具有运动路径mp的运动状态ms的血管系统vs的示意图。
159.在运动状态ms中示出血管系统vs。所述运动状态ms包括在所述运动模型中。所述运动状态ms能够以三维医学图像的形式示出。尤其,那么所述血管系统vs作为三维医学图像示出。示例性地,在该视图中血管部段vsec和血管分支vb被标记。
160.在所述运动状态ms中绘出运动路径mp。所述运动路径mp从起始位置sp伸展至目标位置tp。所述医疗对象mo能够沿着所述运动路径mp运动,以便能够从所述起始位置sp运动到目标位置tp。
161.示例性地,在视图中用圆圈标记临界部位cp。在临界部位cp处,所述运动路径mp穿过血管分支部vb。在不同的运动状态ms中,借助医疗对象mo击中正确的血管分支vsec可以具有不同程度的复杂性。在所示出的视图中能够定义多个临界部位cp。为了概览性,仅绘出一个临界部位cp。
162.根据运动路径mp能够输出控制信号。所述控制信号能够描述:所述医疗对象mo应
沿何种方向运动。此外,所述控制信号能够指明:所述医疗对象mo是否应围绕其自身的轴线旋转和/或所述医疗对象mo的轴线是否应弯曲。
163.图6示出控制设备22的示意图,所述控制设备具有c型臂37和具有光学标记51的相机52作为探测设备和显示设备42。
164.在所示出的实施例中,所述检查对象31能够支承或定位在床32上。尤其,所述检查对象31能够是定位在检查床上的患者。替选地,所述检查对象31能够是假人,所述假人能够用于模拟所描述的方法。
165.在该实施例中,医疗对象mo引入到所述检查对象31中。所述医疗对象mo例如能够是导管或内窥镜。所述医疗对象mo应沿着在视图中不可见的血管系统vs从起始位置sp运动至目标位置tp。
166.在该实施例中,所述探测设备包括c型臂37以及由相机52和光学标记51构成的组合。尤其,传感器包括c型臂37的图像传感器和相机52。借助探测设备检测传感器信号。所述传感器信号用于确定当前的运动状态。
167.c型臂37包括x射线源33和x射线探测器34。所述x射线源33和x射线探测器34彼此相对置地设置在c型臂的臂部38上。它们设置为,使得由所述x射线源33发出的辐射穿透所述检查对象31,使得借助x射线探测器34能够记录具有起始位置sp和目标位置tp的血管系统vs的医学图像。该医学图像为在记录的时间点所述检查对象31的当前的运动状态。将所述医学图像转发给所述控制设备22。
168.所述探测设备还包括相机52,所述相机构成为,检测所述光学标记51的运动。在视图中,为了概览性,仅一个光学标记51用附图标记标明。在检查对象31的胸腔上的所有没有另外标明的圆形标注同样是光学标记51。从光学标记51的运动中能够推断出所述检查对象31的当前的运动状态。尤其,能够推断出呼吸的当前的运动状态。借助相机52检测的关于当前的运动状态的信息同样转发给所述控制设备22。
169.在替选的实施例中,所述探测设备能够包括其它组件,例如ekg设备、呼吸设备等。
170.此外,医学专业人员能够通过经由输入单元41的输入将另外的信息传送给所述控制设备22。为了图解说明所述输入的选项,以虚线绘出在输入单元41和控制设备22之间的连接。所述医学专业人员能够借助于输入单元41例如标记临界部位cp;对距临界部位cp的间距进行标记,自所述间距起应输出控制信号;在运动模型中绘出运动路径mp;定义期望运动状态等。
171.所述控制设备22已经预先接收第一医学图像数据集并且从中对运动模型进行建模。此外,确定了运动路径mp,所述医疗对象mo应沿着该运动路径从起始位置sp运动到目标位置tp。对于期望运动状态或者对于期望运动状态的时间顺序或者对于多个期望运动状态确定所述运动路径mp。所述期望运动状态能够与所述医疗对象mo在所述运动路径mp上的当前的位置相关地有所不同。替选地,能够由医学专家经由输入单元41确定所述运动路径mp和/或期望运动状态。
172.所述控制设备22能够根据所述相机52的和c型臂37的数据来比较:当前的运动状态是否至少近似对应于与所述医疗对象mo的当前位置相对应的期望运动状态。如果两个运动状态ms至少近似彼此对应,则所述控制设备22能够输出控制信号。所述控制信号描述所述医疗设备mo为了继续遵循运动路径mp必须执行的运动。所述控制信号能够如上所述地、
尤其根据图1所述那样构成。
173.在替选的实施方案中,所述控制设备能够在当前的运动状态至少近似对应于所述期望运动状态之前就已经输出所述控制信号。在此,所述控制信号还描述,当前的运动状态何时至少近似对应于所述期望运动状态。能够借助于所述显示设备显示这两个运动状态相对应的推测的或预测的时间点。为此,所述显示设备例如能够显示直至这两个运动状态至少近似对应的预测的时间点出现的倒计时。
174.能够将所述控制信号提供给所述显示设备42。所述显示设备42能够以下述形式将控制信号显示给所述医学专业人员:即所述医学专业人员能够将所述控制信号用作为用于执行所述医疗对象mo的运动的辅助。例如,所述显示设备42能够将所述控制信号以文本和/或图像形式显示。例如,所显示的文本能够描述:所述医疗对象mo应如何以及沿何种空间方向运动。替选地或附加地,能够在图像中显示所述医疗对象mo的运动的类型和空间方向。例如,所述控制信号能够作为象形图显示。替选地,所述控制信号能够与当前的医学图像叠加地显示,所述当前的医学图像由c型臂37记录。尤其,能够在医学图像中用箭头绘出所述控制信号。此外,如果当前的运动状态对应于所述期望运动状态,那么能够显示所述控制信号。替选地,能够在当前的运动状态对应于所述期望运动状态之前不久事先显示所述控制信号,借此所述医学专业人员具有足够的反应时间来执行所述运动。尤其,那么能够附加地显示出现所述期望运动状态的预测的时间点。显示的时间点能够借助于所述运动模型来确定。在所述控制设备22和所述显示设备42之间的连接在视图中以虚线绘出,因为该连接是可选的。
175.替选地,能够将所述控制信号提供给机器人r,所述机器人r如通过控制信号所描述的那样执行所述医疗对象mo的运动。该连接在视图中以虚线绘出,因为所述连接是可选的。所述运动的执行尤其不是本发明的组成部分。
176.在替选的实施例中,所述控制设备22能够确定:通过何种措施能够将当前的运动状态转为期望运动状态。尤其,所述控制设备22能够将关于此的信息提供给所述显示设备42。尤其,所述显示设备42能够以文本和/或图像形式向医学专业人员显示如何能够建立期望运动状态的方式。尤其,所述方式能够以文本形式描述。替选地,能够根据象形图示出所述方式。替选地或附加地,所述控制设备22能够将信息转发或提供给呼吸单元。所述呼吸单元能够有针对性地控制呼吸频率、呼吸幅度和/或呼吸停顿,使得所述检查对象31具有期望运动状态。
177.图7示出用于产生用于控制医疗对象mo的运动的控制信号的控制设备60。在此示出的控制设备60设计为,执行根据本发明的方法。所述控制设备60包括接口61、处理器62、存储器单元63以及输入和输出单元64。在此,根据图5的输入单元41能够是输入和输出单元64的组成部分。在此,所述接口61尤其能够包括另外的接口或子接口。此外,所述处理器62尤其能够包括另外的处理器或子处理器。
178.所述控制设备60尤其能够是计算机、微控制器或集成电路。替选地,所述控制设备60能够是计算机的真实的或虚拟的集群(用于真实的集群的英文专业术语是“cluster”,用于虚拟的集群的英文专业术语是“cloud”)。
179.接口61能够是硬件或软件接口(例如pci总线、usb或火线)。处理器62能够具有硬件元件或软件元件,例如微处理器或所谓的fpga(对于“field programmable gate array,
现场可编程门阵列”的英文缩写)。存储器单元63能够实现为非永久性工作存储器(random access memory,简称为ram)或永久性大容量存储器(硬盘、usb记忆棒、sd卡、固态盘)。输入和输出单元64包括至少一个输入单元42和/或至少一个输出单元。
180.输入单元42尤其能够借助于键盘和/或鼠标来实现。输出单元尤其能够是屏幕。替选地,也能够是构成用于打印图像数据的打印机。
181.在尚未明确发生、然而有意义的情况下并且在本发明的意义上,各个实施例、其各个子方面或特征能够彼此组合或互换,而不脱离本发明的范围。在可转用的情况下,本发明的参考一个实施例描述的优点在没有明确提及的情况下也适用于其它实施例。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1