一种体脂测量装置的制作方法
1.本发明涉及人体测量设备领域,特别是涉及一种体脂测量装置。
背景技术:
2.当前3d建模技术高速发展,诸如激光三角原理、飞行时间原理等研发的3d建模方案,多用于扫地机器人,工业质量把控,物流等行业。
3.市场上目前有一些通过红外和深度传感器来进行点云获取并拼接为3d模型的方案,还有一些通过生物电阻抗检测法测量人体体重、体脂以及分析人体成分的设备——体脂秤,但是并没有一种在方案上同时具有人体3d建模和人体体重,体成分测量的方案。
4.目前,在关于人体3d建模有很多常见的方法,有的方法原理较成熟,但硬件设计不尽人意,导致成本高、设备灵便性差;有的方法还在探索中。现有技术如:一、cn201821247883.6体脂秤及体脂秤用的测量手柄,该设备可测量和分析人体成分,缺点:体脂把手为固定形式,无法根据人体的身高和舒适度调整体脂把手的高度。
5.二、cn201810314867.2三维人体扫描设备的扶手转台机构,该设备是一种内设称重模块的三维人体扫描设备,有一个可上下移动的扶手转台机构,缺点:没有体脂把手的相关模块,无法测量和分析人体成分。
技术实现要素:
6.本发明的目的是针对现有技术的缺陷,提供一种体脂测量装置。
7.本发明是釆用如下技术方案实现的:一种体脂测量装置,所述体脂测量装置包括两个可升降的把手和位于底部的秤体,所述把手连接有把手导轨组件,把手导轨组件固定在测脂装置上;把手可沿把手导轨组件上下滑动;所述把手导轨组件包括导轨滑动组件,导轨滑动组件包括导轨和滑块,把手与滑块连接;所述把手还连接有拖链的一端,拖链的另一端固定在测脂装置上;所述导轨滑动组件的滑块底部设有减震部件,所述减震部件在滑块下落时减震消音;所述测脂把手上设有用于测脂的拇指电极片和手掌电极片;把手内部设有手部pcb片,手部pcb片与拇指电极片和手掌电极片连接;所述秤体包括上秤体,上秤体下方设有称重传感器,所述称重传感器下方连接有下秤体;所述上秤体上方设有秤面,秤面上设有脚部测脂电极,所述脚部测脂电极底部设有接线柱,接线柱连接到脚部pcb板,手部pcb片、脚部pcb板与称重传感器连接到测量终端。
8.进一步的,所述体脂测量装置设有立柱,把手导轨组件位于立柱内,把手穿过立柱上的长孔安装在把手导轨组件上。
9.进一步的,所述把手通过导轨连接件与滑块连接,导轨连接件通过拖链滑动端板与拖链连接。
10.进一步的,所述减震部件包括支撑板,支撑板上设有钢丝减震器,所述钢丝减震器上设有泡棉,泡棉位于滑块下方。
11.进一步的,所述泡棉为eva、硅胶或者橡胶制成。
12.进一步的,所述脚部测脂电极包括左脚测脂电极和右脚测脂电极,所述左脚测脂电极和右脚测脂电极均包括前脚掌电极片和后脚掌电极片。
13.进一步的,所述上秤体和称重传感器之间采用螺栓固定,秤面上设有用于紧固螺栓的开口,开口上设有秤面螺钉盖。
14.进一步的,所述秤体上设有水平仪,所述下秤体底部安装有地脚。
15.进一步的,如权利要求1所述的一种体脂测量装置,其特征在于,所述秤面为abs+pc合金塑料制成;秤体为铝合金制成。
16.与现有技术相比,本发明具有如下优点:把手电极和脚面电极共同测定体脂率,测定结果准确。体脂把手的固定结构以及拖链和导轨的安装方式具有稳定性高、安装简单等特点。适用于同时进行3d扫描和体脂测量的设备。秤面材料优选为abs+pc合金塑料,机械性能和结构强度优良;秤体的材料优选为铝合金,结构稳定性高、重量轻、安装简单。
附图说明
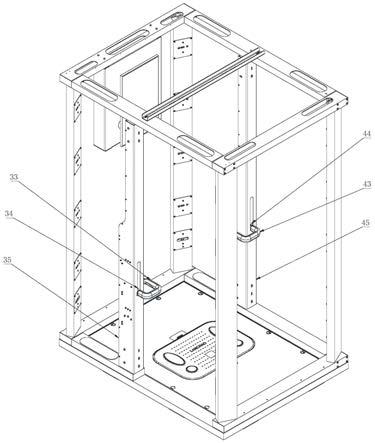
17.图1为框架结构红外扫描与测脂装置;图2为左立柱的结构示意图;图3为左立柱的爆炸示意图;图4为减震部件的结构示意图;图5为秤体安装示意图;图6为体脂秤爆炸示意图;图7为体脂秤轴侧示意图;图8为体脂秤侧面示意图;图9为脚部电极片结构示意图;图10为脚部小板结构示意图。
具体实施方式
18.如图1所示的一种框架结构红外扫描与测脂装置结构示意图,左把手33和右把手43、左把手导轨组件34和右把手导轨组件34、左前立柱35和右前立柱45均为对称结构件。
19.把手部件如图2和图3所示,左把手33、左把手导轨组件34、左前立柱35,其中左把手33与把手连接块341连接,把手连接块341穿过左前立柱351通过紧固件348与导轨连接件342连接,导轨连接件342通过紧固件348固定在导轨滑动组件345上,导轨滑动组件345通过固定件352与左前立柱351固定连接。左立柱爆炸示意图,左把手导轨组件34包含把手连接块341、导轨连接块342、拖链滑动端板343、拖链344、导轨滑动部件345、减震部件346、固定件347、紧固件348、锁紧件349、滑动挡板3410,其中拖链344和滑动挡板3410的通过紧固件
348固定在拖链滑动端板343上,另一端通过紧固件348固定在拖链固定端板353上,拖链固定端板353通过固定件352固定在左前立柱框351上,减震部件346通过固定件352固定在左前立柱框351上。导轨滑动组件345包含导轨3451、导轨支撑板3452、固定件3453、滑块3454,其中滑块3454直接与导轨3451配合装配,导轨3451通过固定件3453与导轨支撑板3452固定连接,导轨支撑板3452通过固定件352与左前立柱351固定连接。
20.减震部件的结构如图3和图4所示,减震部件346包含紧固件3461、eva泡棉 3462、钢丝减震器3463、支撑板3464、锁紧件3465,eva泡棉3462通过紧固件3461与钢丝减震器3463固定连接,钢丝减震器3463通过锁紧件3465与支撑板3464固定连接,支撑板3464通过固定件352与左前立柱351固定连接。
21.如图5所示的一种框架结构红外扫描与测脂装置,底座5和体脂秤6通过螺钉固定连接,电脑主机7为体脂秤的数据计算终端。
22.如图6
‑
10所示,体脂秤6包含脚部电极片61、秤面62、eva衬垫63、上秤体64、称重传感器65、紧固件ⅰ66、脚部pcb 板67、pcb板支撑右板68、pcb板支撑左板69、下秤体610、地脚611、固定垫板612、固定件ⅰ613、锁紧件ⅰ614、端子线板615、水平仪座616、锁紧件ⅱ617、万象水平仪618、固定件ⅱ619、紧固件ⅱ620、秤面螺钉盖621。其中电极片61包含前脚掌电极片61
‑
1、后脚掌电极片61
‑
2,前脚掌电极片61
‑
1包含前脚掌电极片固定螺母柱61
‑1‑
1、前脚掌电极片端子线连接柱61
‑1‑
2、后脚掌电极片61
‑
2包含后脚掌电极片固定螺母柱61
‑2‑
1、后脚掌电极片端子线连接柱61
‑2‑
2,前脚掌电极片61
‑
1通过前脚掌电极片固定螺母柱61
‑1‑
1和紧固件ⅱ620与秤面62固定连接,后脚掌电极片61
‑
2通过后脚掌电极片固定螺母柱61
‑2‑
1和紧固件ⅱ620与秤面62固定连接。其中秤面62、eva衬垫63、上秤体64通过固定件ⅱ619固定连接,上秤体64通过螺钉613与称重传感65固定连接,固定连接后用秤面螺钉盖621扣合在秤面62上封住缺口,称重传感器65另一端通过螺钉613与下秤体610固定连接。其中下秤体610表面通过锁紧件ⅰ614固定有端子线板615,端子线板615上通过锁紧件ⅱ固定有水平仪座616,水平仪座616上直接嵌入万象水平仪618;通过紧固件ⅰ66固定有pcb板支撑右板68和pcb板支撑左板69,pcb板支撑右板68和pcb板支撑左板69上通过紧固件ⅰ66均固定有脚部pcb 板67;另外下秤体610背部直接固定地脚611。
23.本技术的测脂装置连接方式和工作方式为:把手包括包含左把手33和右把手43、左把手导轨组件34和右把手导轨组件34、左前立柱35和右前立柱45。以左把手的结构为例,左把手33包含拇指电极片331、手部pcb332、把手组件333、手掌电极片334,左把手导轨组件34包含把手连接块341、导轨连接块342、拖链滑动端板343、拖链344、导轨滑动部件345、减震部件346、固定件347、紧固件348、锁紧件349、滑动挡板3410,左前立柱包含左前立柱框351、固定件352、拖链固定端板353,导轨滑动组件345包含导轨3451、导轨支撑板3452、固定件3453、滑块3454,减震部件346包含紧固件3461、eva泡棉 3462、钢丝减震器3463、支撑板3464、锁紧件3465。拇指电极片331、手部pcb332和手掌电极片334均固定在把手组件33上,左把手33与把手连接块341固定连接,把手连接块341与导轨连接块342通过紧固件348固定连接,设备使用者可以握住左把手33在左前立柱框351上的行程孔中上下自由移动。导轨连接块342上固定有拖链滑动端板343和导轨滑动部件345,拖链344的一端通过固定件347与拖链滑动端板343固定连接,另一端通过固定件352固定在拖链固定端板353上,拖链固定端板353通过固定件352固定在左前立柱框351上,导轨滑动部件345中的滑块3454直接与导轨
3451配合装配,导轨3451通过固定件3453与导轨支撑板3452固定连接,导轨支撑板3452通过固定件352与左前立柱351固定连接,导轨连接块342随着左把手33的运动使拖链344和滑块3454从动运动。在导轨3451行程末端放置有减震部件346,减震部件346中的eva泡棉3462通过紧固件3461与钢丝减震器3463固定连接,钢丝减震器3463通过锁紧件3465与支撑板3464固定连接,支撑板3464通过固定件352与左前立柱351固定连接,当左把手33移动到最高点时,使用者放开左把手33,左把手33做自由落体运动,左把手33通过滑块3454撞击减震部件346而回到原始位置,减震部件346中的eva泡棉3462和钢丝减震器3463可以起到减震消音的作用。
24.体脂秤6包含61
‑
脚部电极片、62
‑
秤面、63
‑ꢀ
eva衬垫、64
‑
上秤体、65
‑
称重传感器、66
‑
紧固件ⅰ、67
‑
脚部pcb 板、68
‑
pcb板支撑右板、69
‑
pcb板支撑左板、610
‑
下秤体、611
‑
地脚、612
‑
固定垫板、613
‑
固定件ⅰ、614
‑
锁紧件ⅰ、615
‑
端子线板、616
‑
水平仪座、617
‑
锁紧件ⅱ、 618
‑
万象水平仪、619
‑
固定件ⅱ、620
‑
紧固件ⅱ、621
‑
秤面螺钉盖。以左脚电极接线为例,前脚掌电极片61
‑
1通过前脚掌电极片固定螺母柱61
‑1‑
1和紧固件ⅱ620与秤面62固定连接,后脚掌电极片61
‑
2通过后脚掌电极片固定螺母柱61
‑2‑
1和紧固件ⅱ620与秤面62固定连接。其中秤面62、eva衬垫63、上秤体64通过固定件ⅱ619固定连接,上秤体64通过螺钉613与称重传感65固定连接,固定连接后用秤面螺钉盖621扣合在秤面62上封住缺口,称重传感器65另一端通过螺钉613与下秤体610固定连接。其中下秤体610通过紧固件ⅰ66固定pcb板支撑左板69,pcb板支撑左板69上通过紧固件ⅰ66固定有脚部pcb 板67,脚部pcb 板67包含pcb板端子连线67
‑
1、pcb板主体67
‑
2,pcb板主体67
‑
2包含前脚掌电极片端子线67
‑2‑
1、后脚掌电极片端子线67
‑2‑
1,前脚掌电极片端子线67
‑2‑
1通过紧固件619压入前脚掌电极片端子线连接柱61
‑1‑
2,后脚掌电极片端子线67
‑2‑
2通过紧固件619压入后脚掌电极片端子线连接柱61
‑2‑
2,最终pcb板端子连线67
‑
1和称重传感器后端连线65
‑
2通过端子线板615接入终端数字板(图中未示出),另外手部pcb片也连接到终端数字板,手部、脚部电极共同完成体脂测量。
25.以下各案例所述用于制备相应的金属陶瓷材料为最优选而已,并不用于限制本发明。相关技术人员依然可以根据前述方案做相应修改。或者对其中部分技术特征做等同替换。凡在本发明精神和原则之内做的任何修改,等同替换和改进等。均应包含在本发明的保护范围之内。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1